Capitolo 4. ANALISI DEI SEGNALI
4.1. Introduzione
I segnali provenienti dai trasduttori analogici, come spiegato nel capitolo precedente, sono funzioni continue nel tempo, ma per essere acquisite vengono campionate, cioè trasformate in funzioni discrete costituite da successioni di numeri. Sono queste sequenze che sono state analizzate, passando dal dominio del tempo a quello delle frequenze. L’analisi è stata svolta per mezzo del programma di calcolo MatLab 6.5, e i risultati ottenuti vengono riportati nel capitolo 6. In questo capitolo viene dato un breve richiamo dei concetti fondamentali che stanno alla base del tipo di analisi svolto.
4.2. Spettro di un segnale
Si definisce spettro di un segnale il diagramma frequenza-ampiezza delle componenti del segnale stesso. J.B.Fourier ha dimostrato che un qualsiasi segnale periodico può essere generato sommando tra loro onde sinusoidali di opportuna frequenza, ampiezza e fase. Quindi il generico segnale può essere scomposto in una somma di onde sinusoidali, ed è altresì dimostrato che tale scomposizione è unica.
La trasformata di Fourier è lo strumento matematico attraverso il quale è possibile trasformare i dati dal dominio del tempo a quello delle frequenze. In particolare ([11]) se f(t) è una funzione continua nel tempo periodica di periodo T che viene campionata, cioè rappresentata da una successione di N numeri reali o complessi f(q) che rappresentano i valori di f(t) ai tempi t=q t=qT/N con q=0,1,…,N-1, come nel nostro caso, si utilizza la trasformata finita discreta di Fourier (DFT). Essa è la funzione discreta F(p), definita per p=0,1,…,N-1 come:
[
]
− = − = = 1 0 ) ( 1 ) ( ) ( N q pq N Fd f q N f q w T p Fdove: N i N e w π 2 =
Allo scopo di velocizzare le operazioni di calcolo viene usato un algoritmo che prende il nome di fast Fourier transform (FFT); infatti il calcolo della trasformata con N termini richiede N2 operazioni, ma se il numero N di campioni è tale che N=2d il numero di operazioni
può essere ridotto a Nlog2N
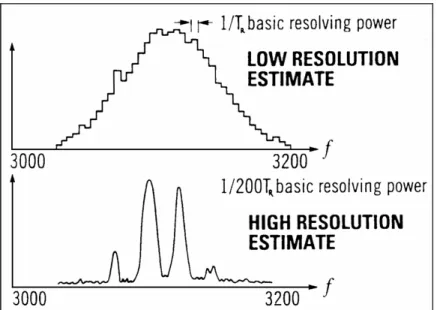
Le caratteristiche dell’operazione di trasformazione sono tali che la risoluzione in frequenza e la frequenza massima analizzabile sono funzione sia del numero di campionamenti N sia della frequenza di campionamento FS. In particolare la “spaziatura” tra
due frequenze successive (risoluzione) è data da:
N F T f S R = = ∆ 1
dove f rappresenta la risoluzione massima ottenibile nel dominio delle frequenze per un segnale registrato per un tempo TR. Per una migliore stima delle componenti spettrali
occorre porre particolare attenzione alla risoluzione. In figura 4.1 è mostrato come l’aumento del tempo di registrazione e la conseguente miglior risoluzione possano evidenziare picchi significativi di cui altrimenti si sarebbe persa traccia.
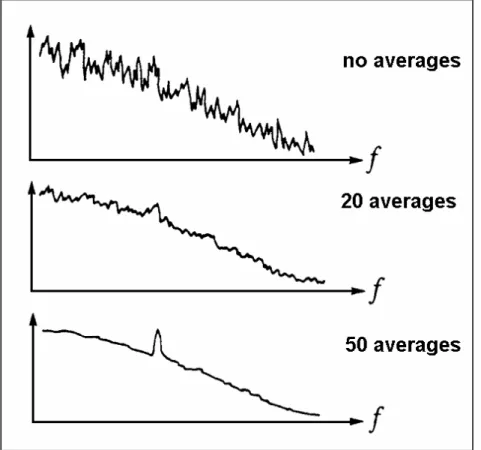
Un’altra operazione che và a favore della migliore interpretazione delle caratteristiche di uno spettro è la media di blocchi di segnali campionati ([12]), con la quale si possono eliminare dal segnale stesso disturbi di tipo casuale (figura 4.2).
Figura 4. 2: Influenza della media nell’interpretazione di un segnale.
Purtroppo l’aumento del tempo di registrazione del segnale e l’operazione di media non sono sempre facilmente attuabili, in particolare nei casi in cui i fenomeni da analizzare siano molto brevi o abbiano caratteristiche di transitorietà.
4.3. Dispersione in frequenza (Leakage)
La FFT calcola lo spettro su un intervallo di tempo TR, dato dagli N campionamenti,
considerando la funzione temporale come un segnale di periodo TR. Il segnale non risulta
quindi perfettamente riprodotto nel caso in cui il tempo di registrazione TR non sia multiplo
intero del periodo fondamentale del segnale originario. Ne risultano delle discontinuità agli estremi del periodo di registrazione, ragion per cui lo spettro calcolato mediante la FFT non risulta esattamente corrispondente a quello reale, ma presenta uno spargimento (leakage) di energia della linea spettrale originaria, come è possibile vedere nella figura 4.3 dove è
rappresentato un segnale sinusoidale non periodico nella finestra temporale di acquisizione e la sua rispettiva FFT nel dominio della frequenza ([12]).
Figura 4. 3: Segnale sinusoidale nel dominio del tempo e sua FFT
Dal momento che risulta impossibile conoscere a priori il periodo di un segnale in esame il leakage è sempre presente e deve essere attenuato per ottenere un’analisi accettabile. Un metodo per ottenere questo risultato è quello di moltiplicare il segnale per una funzione w(t) definita negli stessi punti dell’intervallo TR ed avente una forma tipica a “campana” con
valore tendente a zero agli estremi. Tale metodo prende il nome di “finestratura” (windowing), e non modifica il contenuto in frequenza del segnale di partenza che viene modulato solo in ampiezza.
Nella figura 4.4 si riporta il segnale sinusoidale e la sua FFT, con finestratura Hanning; effettuando un confronto con la figura 4.3 si nota la minore dispersione della linea spettrale.
Ci sono vari tipi di finestre, utilizzabili a seconda del segnale originale che deve essere esaminato ([12]):
o Per eccitazioni/risposte continue (ma non periodiche) la finestra più utilizzata è la Hanning, che rende il segnale nullo agli estremi dell’intervallo di misura, in maniera graduale.
o Per eccitazioni/risposte transitorie, se il segnale non si smorza totalmente entro la fine dell’intervallo di misura, si applica una finestra esponenziale.
o Per la separazione di due toni con frequenze molto vicine tra di loro ma con ampiezze completamente diverse è indicata la finestra Kaiser-Bessel.
o Per segnali con durata corta del transitorio rispetto alla lunghezza della finestra, e per separare segnali con frequenze molto vicine tra di loro e con quasi la stessa ampiezza, è indicata la finestra Rectangular.
o Per la determinazione delle ampiezze di vibrazione è indicata la finestra Flat-Top.
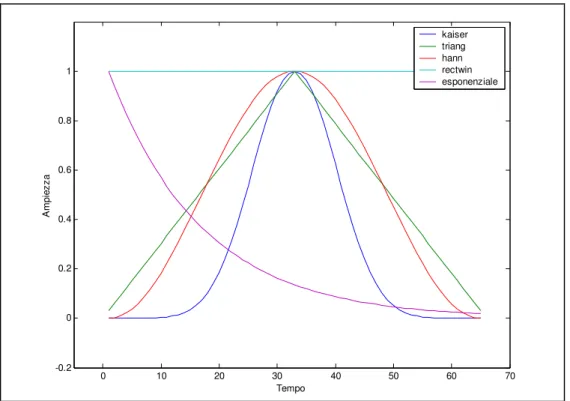
In figura 4.5 viene riportato l’andamento delle suddette finestre.
0 10 20 30 40 50 60 70 -0.2 0 0.2 0.4 0.6 0.8 1 Tempo A m pi ez za kaiser triang hann rectwin esponenziale
4.4. I filtri
In tutti i sistemi in cui si desidera che i segnali non voluti subiscano la massima attenuazione possibile (banda d'arresto) ed i segnali voluti abbiano la minore attenuazione possibile (banda passante) occorre utilizzare i filtri. In base alla posizione sull'asse delle frequenze della banda d'arresto rispetto alla banda passante si ottengono filtri di vario tipo: passa-basso, passa-alto, passa-banda e stoppa-banda.
I filtri si suddividono in FIR, a risposta dell'impulso finita, e IIR a risposta dell'impulso infinita.
La risposta del filtro ampiezza-frequenza e fase-frequenza può soddisfare una ben precisa funzione di trasferimento matematica (Butterworth, Tschebyscheff, Bessel, gaussiani, ellittici…), oppure è possibile approssimare la forma richiesta mediante una funzione polinomiale razionale fratta.
Per ridurre gli effetti dell’aliasing, come già accennato nel capitolo precedente, è conveniente utilizzare un filtro anti-aliasing, che è di genere passa-basso ([13]). Infatti in generale un segnale non sarà mai limitato in banda, quindi l’unico modo sicuro per evitare tale problema è applicare questo genere di filtro, per limitare il contenuto ad alta frequenza del segnale. Come già spiegato la pendenza dei filtri non è perfetta (figura 4.6) come sarebbe per un filtro ideale. Occorre quindi sovracampionare il segnale in modo che la massima frequenza di interesse non venga influenzata dal roll off del filtro.
Capitolo 5. IMPACT TESTING
5.1. Identificazione delle frequenze proprie del disco freno
Per individuare le frequenze proprie del disco freno è stata compiuta su di esso una prova di impact testing, cioè si è eccitato impulsivamente il disco (con un colpo di martello) e si è rilevato il segnale di risposta all’eccitazione con un accelerometro e il rispettivo amplificatore di segnale. Per compiere questa prova si è smontata la pinza in modo che non ostacolasse il disco nelle sue vibrazioni.
Di seguito viene riportata la descrizione della strumentazione utilizzata e dei risultati ottenuti con questa prova.
5.2. Strumentazione utilizzata
Per compiere le prove di impact testing si è posizionato un accelerometro sulla pista frenante (figura 5.1).
Tale sensore, che è il tipo 4374 della “Bruel & KjaerTM”, è a funzionamento piezoelettrico e, con l’ausilio dell’amplificatore di carica a cui è collegato (figura 5.2), offre in uscita una tensione che risulta essere proporzionale all’intensità dell’accelerazione rilevata. La sensitività di tale accelerometro è di 0.148 mV/ms2, il limite massimo di frequenza di utilizzo di 20 kHz e la massa è di 0.65 grammi. L’applicazione sul disco è stata effettuata tramite adesivo in due posizioni differenti, come descritto nel seguito.
Figura 5. 2: Amplificatore di carica
L’amplificatore di segnale è stato collegato al canale 0 della terminaliera connessa alla scheda di acquisizione montata sul PC in uso.
5.3. Software sviluppato per l’impact testing
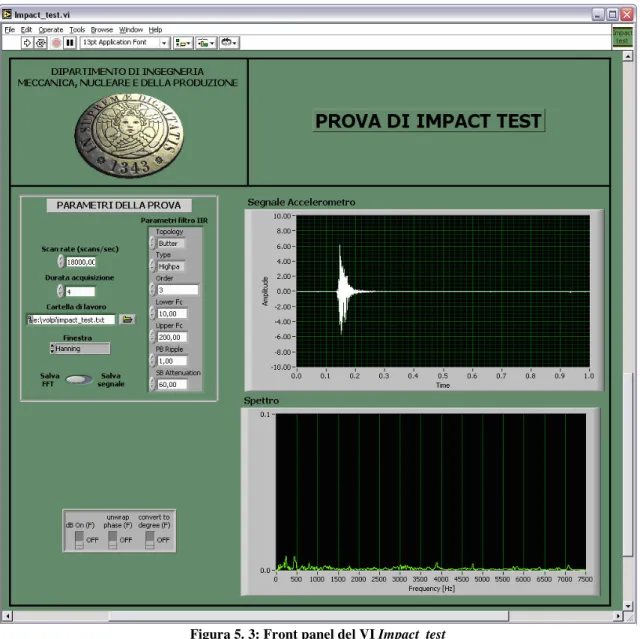
Per l’acquisizione del segnale proveniente dall’accelerometro si è sviluppato un semplice VI chiamato Impact_test, il cui front panel è riportato in figura 5.3, mentre il block diagram è riportato in appendice A. Questo VI acquisisce il segnale dell’accelerometro per un tempo impostabile dal pannello frontale (nelle prove si è sempre utilizzato un tempo di quattro secondi), vi applica un filtro IIR, e ne fa la FFT. L’utente può decidere se salvare il segnale acquisito direttamente dal sensore o la sua FFT; in entrambi i casi si salva un file di testo contenente un vettore di dati in colonna.
Figura 5. 3: Front panel del VI Impact_test
Oltre al tempo di acquisizione è necessario impostare lo scan rate, che nelle prove svolte è stato posto pari a 18000 Hz, in accordo con il criterio di Nyquist, il quale stabilisce che la frequenza di campionamento deve essere almeno il doppio della massima frequenza di interesse, che, sulla base dello studio agli elementi finiti svolto in [1], ci si aspetta essere intorno ai 4000 Hz. Inoltre è possibile specificare il tipo di finestra con cui trattare il segnale per minimizzare il leakage e i parametri del filtro IIR. La finestratura utilizzata è stata di tipo Hanning, mentre il filtro è un Butterworth di tipo passa-alto con ordine tre e frequenza di taglio Fc pari a 10 Hz.
5.4. Risultati ottenuti
Si sono compiute ottanta prove di impact testing variando sia la posizione dell’accelerometro che quella del punto di impatto del martello. Le FFT di tali prove sono state salvate in altrettanti file di testo. E’ stato quindi sviluppato un file MatLab di nome Impact_test, che fa la media tra tutte le FFT acquisite per poter eliminare i disturbi di origine casuale, e mette il risultato su un grafico in funzione della frequenza. Tale file è riportato in appendice B.
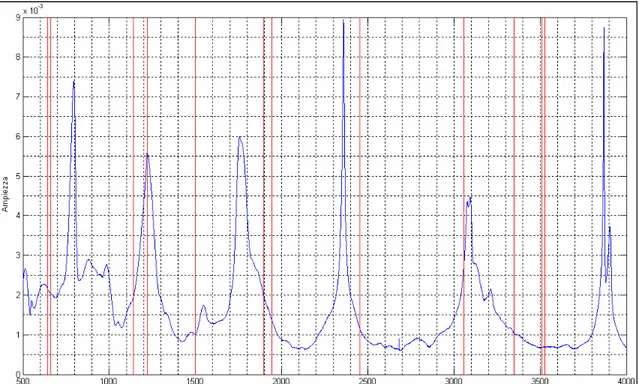
In figura 5.4 è riportato il grafico ottenuto per mezzo dell’elaborazione in ambiente MatLab. Le linee rosse che sono state poste su tale grafico mostrano le frequenze dei modi propri di vibrare del disco che erano state trovate con lo studio agli elementi finiti svolto in [1]. Si nota che alcune di tali frequenze sono riconducibili alle frequenze proprie trovate con la prova di impact testing, mentre altre no. Questo può essere imputato principalmente a due motivi. Innanzitutto lo studio svolto in [1] riguarda la sola pista frenante vincolata rigidamente, mentre le prove svolte dovrebbero evidenziare le frequenze proprie di tutto il sistema pista frenante-porta pista frenante. Inoltre lo studio agli elementi finiti tiene di conto di tutti i possibili tipi di eccitazione a cui il disco può essere sottoposto, mentre lo stesso non si può dire delle prove compiute sperimentalmente, per quanto si sia cercato di eseguirle in più modi differenti.
I risultati trovati possono comunque essere d’aiuto, insieme a quelli trovati in [1], nell’interpretazione dei risultati ottenuti utilizzando il banco prova, risultati che vengono riportati nel prossimo capitolo.
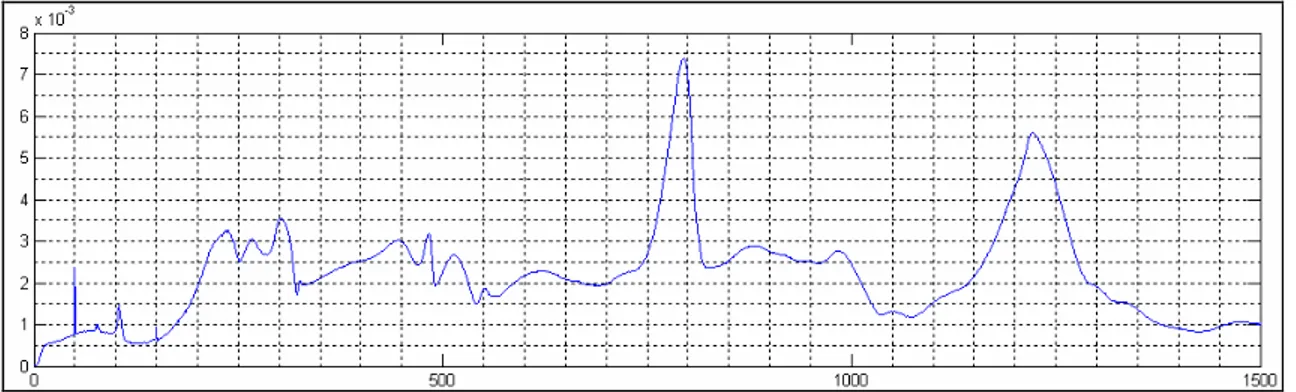
In figura 5.5 si riporta il risultato dell’impact testing anche per la zona da 0 a 1500 Hz, che evidenzia le frequenze proprie del sistema in questo campo.
Capitolo 6.
ATTIVITA’ SPERIMENTALE
6.1. Introduzione
L’attività sperimentale è stata articolata in una serie di campagne di acquisizione ed analisi di dati. Le prime acquisizioni sono servite a controllare il corretto funzionamento dei sensori e del software ad essi dedicato, oltre che l’affidabilità dei dati rilevati. E’ stata quindi compiuta una campagna di acquisizione dati variando di volta in volta alcuni parametri. Le prove effettuate sono tutte ripetibili una volta reimpostati i parametri caratterizzanti la prova stessa. Le acquisizioni sono state tutte svolte con uno scan rate pari a 18000 Hz.
6.2. Prove di messa a punto
Inizialmente si sono svolte delle prove di acquisizione per controllare l’affidabilità dei dati provenienti dai sensori.
In figura 6.1 si riportano i grafici tensione-tempo dei segnali letti dai trasduttori di posizione durante una prova con velocità del motore costante pari a 800 rpm, la slitta porta-pinza posizionata a 0 mm, e senza frenare. In alto c’è il segnale proveniente dal trasduttore 1, che misura lo spostamento del disco sul diametro ortogonale a quello su cui è applicata la forza frenante, in basso quello proveniente dal sensore 2. Si nota come i segnali siano simili ma sfasati, come era ovvio aspettarsi dal momento che i due trasduttori sono posizionati, come spiegato nel capitolo due, a 90° l’uno dall’altro.
Il segnale non si mantiene costante, benché il disco sia lasciato libero di ruotare senza frenare. Le fluttuazioni con periodo maggiore hanno un ampiezza pari a circa 78 µm, e sono imputabili a sbilanciamenti di albero e pista frenante che sono evidenti anche ad occhio nudo. I picchi che si ripetono con periodo minore sono invece dovuti al fatto che i sensori si affacciano sulla serie di fori per il raffreddamento più esterna della pista frenante. Non esiste sul disco una zona dove far affacciare i due sensori senza avere tale disturbo.
Figura 6. 1: Uscita dei trasduttori di posizione
Per quel che riguarda la cella di carico i segnali acquisiti si presentano un pò disturbati da rumore (figura 6.2). La fonte di disturbo si è dimostrata essere l’inverter che serve per azionare il motore. Infatti si è fatta la prova di acquisire il segnale della cella di carico a motore e inverter fermi, e in questo caso il rumore non si presenta. Ripetendo la stessa prova ancora a motore fermo ma con inverter acceso appare il rumore. In tutti e due i casi, comunque, il valor medio registrato dalla cella di carico è intorno a 156,7 N, cioè il peso del motore, come era giusto aspettarsi.
Figura 6. 2: Segnale della cella di carico in una prova senza frenata a 600 giri al minuto del motore
Il sensore tachimetrico permette di calcolare i giri al minuto compiuti dall’albero porta pista frenante. Grazie ad esso è stato possibile controllare il rapporto di trasmissione tra albero porta pista frenante e albero del motore, che sperimentalmente risulta essere di circa 1:3,1
invece di 1:3 come ci si aspettava. Questa piccola differenza è dovuta a una non perfetta corrispondenza tra il valore di velocità impostata e quella effettivamente attuata dall’inverter, come è risultato da una prova utilizzando un contagiri laser. Il segnale proveniente dal sensore tachimetrico ha un andamento del tipo di quello di figura 6.3. Le valli che si vedono a circa -8 Volt evidenziano i momenti in cui il sensore è in prossimità della cava ricavata sull’albero porta pista frenante.
Figura 6. 3: Segnale del sensore tachimetrico in una prova senza frenata a 600 giri al minuto del motore Infine il sensore di pressione restituisce un segnale disturbato da rumore in maniera simile alla cella di carico, ancora per la presenza dell’inverter. Acquisendo il segnale in prove effettuate senza azionare la leva del freno, la pressione si mantiene intorno a 0,03 bar. Si è notato che dopo un pò di tempo mantenendo in una posizione fissa la leva del freno la pressione tende ad aumentare. Tale effetto potrebbe essere causato dal surriscaldamento del liquido nel circuito frenante, che a temperature elevate raggiunte per attrito tra disco e pista frenante sembrerebbe dilatarsi più dei tubi che lo contengono.
6.2.1. Stima del momento frenante e del coefficiente di attrito
Per trovare il momento frenante durante una prova con pressione nel circuito frenante costante è necessario effettuare anche una prova di confronto con stessa velocità del motore ma senza frenare. La differenza tra il valore medio del segnale rilevato dalla cella di carico nel secondo caso con quello rilevato nel primo, moltiplicata per il braccio rispetto all’asse di rotazione del supporto motore (0,15 m) è il momento frenante. Ad esempio con due prove a velocità del motore di 1000 rpm, di cui una mantenendo nel circuito frenante una pressione di 82 kPa e l’altra senza frenare, la cella di carico ha restituito come valori 281,4 N e 172,28 N. Facendo la differenza tra questi due valori e moltiplicandola per il braccio si è infine identificato un momento frenante Mf pari a 16,37 Nm. Una volta stimato il momento frenante
sistema frenante, al coefficiente di attrito tra la pista frenante e le pastiglie stesse. Essendo nota la pressione media nel circuito frenante pm (82 kPa) la forza assiale di serraggio N risulta
essere:
) (A1 A2 p
N = m +
dove A1 e A2 sono le aree dei due pistoncini che spingono su una pastiglia, che hanno
diametri differenziati, rispettivamente 30 e 34 mm, per contrastare l’effetto cuneo e permettere una più uniforme usura della pastiglia. Nel caso preso ad esempio N risulta così essere 132,4 N. Utilizzando l’ipotesi del Reye per il momento frenante Mf vale la seguente
relazione:
m f fNR
M =2
dove f è il coefficiente di attrito cercato, Rm il raggio medio della pastiglia (142,5 mm)
e il coefficiente 2 è dovuto al fatto che sul disco si serrano due pastiglie. Sostituendo nell’ultima relazione i valori di Mf e di N precedentemente trovati si risale al valore del
coefficiente di attrito f, che è in questo caso pari a 0,43. Tale calcolo è stato svolto per più acquisizioni utilizzando un semplice file di Matlab (attrito.m, presente in appendice B); si è così verificato che il valore del coefficiente di attrito non risulta essere sempre costante, ma ha un valore medio di 0,35 con deviazione standard di 0,048.
Figura 6. 4: Geometria della pastiglia
Sempre utilizzando l’ipotesi del Reye è possibile trovare il valore medio p della pressione con cui le pastiglie si serrano sul disco. Infatti per la forza assiale vale la relazione:
) (Re2 Ri2 p
dove Re e Ri sono i raggi esterno e interno della pastiglia e α l’angolo riportato in
figura 6.4. Nel caso preso in esame p risulta essere 53 kPa.
6.3. Prime prove
Una volta effettuate le prove di messa a punto si è proceduto a effettuare una campagna di prove utilizzando il VI Girimotorevariab, variando linearmente la velocità del motore mentre si manteneva costante la pressione nel circuito idraulico. Tale tipo di prova è stato ripetuto in diverse posizioni della slitta mobile per variare la rigidezza del supporto pinza, e a diversi valori di pressione nel circuito frenante che permettessero però di non bloccare il disco. I dati salvati durante queste prove sono stati rielaborati in Matlab per mezzo di un file precedentemente preparato (spettro.m, presente in appendice B) che permette di trovare lo spettro dei segnali acquisiti dopo avervi applicato una finestra di Hanning e dopo aver filtrato i segnali a bassa frequenza (sotto 50 Hz) che sono privi di interesse. Tale programma costruisce inoltre tutti i grafici tempo-ampiezza dei segnali acquisiti. Questa campagna di prove aveva lo scopo di osservare la macchina in una gamma di condizioni di funzionamento che ricoprisse una zona più vasta possibile tra tutte quelle possibili alla ricerca di vibrazioni da “squeal” nel sistema disco freno-pinza.
Alla fine di tale ricerca non sono stati individuati fenomeni vibratori di tale genere. Si è deciso quindi di documentare i risultati acquisiti. Per farlo si è deciso di utilizzare il VI Girimotorecost, con il quale si sono compiute prove a pressione costante alle velocità di 400, 800, 1200, 1600 e 2000 rpm, spostando il supporto pinza nelle posizioni a 0, 40, 80, 120 e 150 mm. I dati acquisiti sono stati quindi rielaborati per mezzo di un file Matlab a cui è stato dato nome cascata; tale programma ha in ingresso i segnali acquisiti alle varie velocità per una posizione del supporto pinza, da cui estrae i dati relativi ad uno dei sensori di posizione, ne calcola lo spettro per ogni velocità e crea con i cinque vettori di dati ottenuti dei diagrammi a cascata. Nelle figure dalla 6.5 alla 6.8 sono riportati appunto i grafici ottenuti per le cinque posizioni del supporto pinza scelte, dove sono riportati gli spettri dei dati relativi al sensore di posizione uno alle varie velocità per ogni posizione della slitta. Non si riportano i grafici relativi al sensore due che sono completamente analoghi. Osservando tali grafici si evidenzia come nelle prove si notino solo dei picchi dovuti a risonanze eccitate da squilibri del disco, e che si spostano in maniera evidente all’aumentare della velocità. A certe frequenze tali picchi aumentano in ampiezza, come il picco a 150 Hz per la velocità di 1600 rpm. Questo aumento è dovuto al sovrapporsi delle frequenza di questo fenomeno con quelle proprie del sistema.
Infatti in figura 5.5, che mostra appunto le frequenze proprie del sistema, si nota come a 150 Hz sia presente un piccolo picco.
Non si è però manifestato il fenomeno dello “squeal”. La mancata osservazione di tale fenomeno potrebbe essere imputabile a più fattori. Tanto per cominciare il sistema ricreato con il banco prova potrebbe essere eccessivamente rigido. In letteratura [14] si trovano esperimenti simili a quello qui presentato, ma svolti utilizzando pastiglie di superficie ridotta; l’elevata superficie della pastiglie in uso potrebbe impedire il manifestarsi di certi modi di vibrare.
Inoltre ci sarebbe da considerare l’influenza che la temperatura può avere su questi fenomeni. Infatti in letteratura [2] si trova che, soprattutto per quel che riguarda il “low squeal”, il surriscaldamento del disco può far scomparire i fenomeni vibratori.
Infine potrebbe valer la pena di fare una campagna di prove variando il coefficiente di attrito tra disco e pinza, che sicuramente ha un ruolo determinante nel fenomeno, ad esempio bagnando il disco per ricreare il funzionamento del freno in caso di pioggia.
Capitolo 7. CONCLUSIONI
Nel compiere il presente lavoro gli obiettivi erano sostanzialmente i seguenti tre:
o messa a punto sensoristica di un banco prova strumentato;
o sviluppo del software per l’acquisizione dei dati dal suddetto banco; o sviluppo di una campagna di prove per testare le capacità del banco, e
in particolare la capacità di riprodurre in laboratorio fenomeni di squeal, analizzando i dati ottenuti.
La messa a punto sensoristica è stata eseguita con successo, di modo che attualmente sul banco prova sono presenti due sensori di posizione per misurare le vibrazioni del disco freno nella direzione del suo asse, di un sensore tachimetrico per la misura della velocità dell’albero porta pista frenante, di un sensore di pressione per il circuito idraulico di frenata e di una cella di carico che permette di risalire al momento frenante attuato.
Per mezzo del programma LabVIEW 6.1 è stato sviluppato il software che permette di gestire più tipi di prove di acquisizione.
Si sono quindi eseguite delle prove di messa a punto del sistema, che hanno mostrato come i segnali provenienti dai tutti i sensori siano congruenti con quanto ci si poteva aspettare. In particolare si è osservato come sia possibile giungere a una stima del momento frenante e del coefficiente di attrito tra disco e pastiglie. Alla luce dei risultati ottenuti sarebbe auspicabile un miglioramento della schermatura per ridurre il rumore che interessa qualcuno dei sensori.
La campagna di prove mirata ad osservare i fenomeni vibratori ricercati non ha invece avuto esito positivo. Si è comunque proceduto a documentare le analisi effettuate.
o eccessiva rigidità del sistema, in particolare in relazione alla superficie delle pastiglie utilizzate;
o influenza della temperatura;
o influenza delle variazioni del coefficiente di attrito tra disco e pinza; Alla luce di tutto questo possibili sviluppi futuri per questo progetto sono i seguenti:
o controllo delle rigidezze del sistema;
o esecuzione di prove utilizzando delle pastiglie ridotte in superficie; o aggiunta al banco prova di un sensore per monitorare la temperatura del
disco e di un sistema di raffreddamento più energico di quello ad aria compressa che è stato finora utilizzato;
o esecuzione di una campagna di prove in cui si vari il coefficiente di attrito tra disco e pastiglie.
Appendice A. DIAGRAMMI DEI VI SVILUPPATI
Appendice B.
PROGRAMMI SVILUPPATI IN MatLab
B.1. impact_test.m
%%%%%%%%%%%%%%%%%%% %% IMPACT TEST %% %%%%%%%%%%%%%%%%%%%
% Questo listato legge i file delle fft ricavate nelle prove di impact % test, ne fa la media e mette il risultato su un grafico
clear; clc;
% Legge i files acquisiti
num=input('Numero file da analizzare =');
t=input('Numero primo impact test da considerare ='); for i =t: (t+num-1);
z=load(['impact_test' num2str(i) '.txt']); eval(['file' num2str(i) '= z;']);
end
% Crea una matrice con i files letti for i =t; A=eval(['file' num2str(i)]); end for i =(t+1):num; j=num2str(i); B=eval(['file' j]); C=[A B]; A=C; end
% Calcola la media e la mette su grafico f=18000*(0:(72000/2))/72000; media=mean(A,2); figure(1); plot(f,media(1:((72000/2)+1))); title('Impact test'); xlabel('Frequenza (Hz)'); ylabel('Ampiezza'); grid minor;
B.2. spettro.m
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %% CALCOLO DELLO SPETTRO DELLE FREQUENZE %% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Questo file legge il file di testo di un acquisizione, mette ogni segnale % su un grafico rispetto al tempo e calcola gli spettri dei segnale dei % primi quattro sensori, mettendoli su grafico
clear; clc;
nfile=input('Nome file da analizzare =','s'); Fs=18000;
ingresso=load(nfile);
Nfft=input('Numero di campioni per vettore da analizzare[4096/8192/16384] =');
t=(0:1/Fs:(Nfft-1)/Fs)
% Assegnazione dati ai sensori sens1=ingresso((1:Nfft),1); sens2=ingresso((1:Nfft),2); cella=ingresso((1:Nfft),3); senspress=ingresso((1:Nfft),4); contagiri=ingresso((1:Nfft),5); % Definizione finestra temporale w=hanning(Nfft); % Definizione filtri [b,a]=butter(3,(2*20)/Fs,'high') [bc,ac]=butter(3,(2*20)/Fs,'high') sens1f=filter(b,a,sens1) sens2f=filter(b,a,sens2) cellaf=filter(bc,ac,cella) % Calcolo dello spettro
[P1,f1]=spectrum(sens1f,Nfft,0,w,Fs); [P2,f2]=spectrum(sens2f,Nfft,0,w,Fs); [P3,f3]=spectrum(cellaf,Nfft,0,w,Fs); [P4,f4]=spectrum(senspress,Nfft,0,w,Fs);
% Grafici dei segnali importati e degli spettri calcolati figure(1); subplot(2,1,1); plot(f1,P1); grid minor; subplot(2,1,2); plot(t,sens1); grid minor; figure(2); subplot(2,1,1); plot(f2,P2); grid minor;
subplot(2,1,2); plot(t,sens2); grid minor; figure(3); subplot(2,1,1); plot(f3,P3); grid minor; subplot(2,1,2); plot(t,cella); grid minor; figure(4) plot(f4,P4); grid minor; figure(5); plot(t,contagiri); grid minor;
B.3. cascata.m
%%%%%%%%%%%%%%%%%%%%%%%%%% %% Spettri in cascata %% %%%%%%%%%%%%%%%%%%%%%%%%%%% Questo file apre un numero di acquisizioni pari a num, calcola lo spettro % del segnale di interesse in ogni file e mette tutti i risultati in un % diagramma a cascata
clear; clc; Fs=18000;
% Apre un numero qualsiasi di file
num=input('Numero files da analizzare=');
Nfft=input('Numero di campioni per vettore da analizzare[4096/8192/16384] =');
Nf=input('Numero primo campione del vettore da analizzare ='); Z=20; for i=1:1:(Nfft/2); S=[Z 20]; Z=S; end R=S' for i=0:(num-1); j=i+1 L=load(['150mm ' num2str(j) '.txt']); eval(['nfile' num2str(i) '=L;']); end % Assegnazione dati for i=0:(num-1); sens1x=eval(['nfile' num2str(i) '(:,1);']); eval(['sens1' num2str(i) '=sens1x;']); end
w=hanning(Nfft); % Filtro Butterworth
[b,a]=butter(3,100/Fs,'high'); % Calcola gli spettri
for i=0:(num-1); t=eval(['sens1' num2str(i)]); tf=filter(b,a,t); eval(['sens1f' num2str(i) '=tf;']); u=eval(['sens1f' num2str(i)]); [Px,fx]=spectrum(u,Nfft,0,w,16384); Px1=Px(:,1); H=i*R; Px11=H+Px1; eval(['P' num2str(i) '= Px11;']); eval(['ff' num2str(i) '=fx;']); end
% Crea una matrice con i vettori trovati e fa il grafico in cascata M=P0 for i=1:(num-1); U=eval(['P' num2str(i)]); M1=[M U]; M=M1; end plot(ff1,M,'b');
B.4. attrito.m
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %% CALCOLO MEDIA E DEVIAZIONE STANDARD COEFF. ATTRITO %% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Questo file calcola il coefficiente di attrito per un numero num di % prove, dopo di che ne fa la media e calcola la deviazione standard clear;
clc;
num=input('Numero coppie di file da analizzare ='); t=input('Numero prima coppia di file da considerare='); Nfft=16384;
% Apre i file e calcola il coefficiente di attrito per ogni prova for i=t:(t+num-1);
v=load(['vuoto ' num2str(i) '.txt']);
fr=load(['frenata 0.6bar ' num2str(i) '.txt']); cella1=v((1:Nfft),3); cella2=fr((1:Nfft),3); press=fr((1:Nfft),4); M1=mean(cella1); M2=mean(cella2); Pm1=mean(press); Pm=2*Pm1*10^5;
M1N=59*M1; M2N=59*M2; M=0.15*(M2N-M1N); f=M/(0.000627*Pm); eval(['f' num2str(i) '=f;']); end;
% Calcola valore medio e deviazione standard tra i valori del coefficiente % di attrito trovati for i=t; A=eval(['f' num2str(i)]); end for i=(t+1):num; B=eval(['f' num2str(i)]); C=[A B]; A=C; end Am=mean(A); Ds=std(A);
BIBLIOGRAFIA
[1] Bertolucci M., “Indagine numerico sperimentale dello squeal in un freno motociclistico”, Università di Pisa, DIMNP 2006.
[2] K. Brent Dunlap, Michael A. Riehle and Richard E. Longhouse, “An Investigative Overview of Automotive Disc Brake Noise”, Paper No. 1999-01-0142, SAE International Congress and Exposition, Detroit, Michigan, 1999.
[3] Wauer J., Heilig J., “Friction-induced instabilities in a disk brake model”, Tian Huang, Tianjin, China, 2004.
[4] Sinou J.J. et al., “Non-linear dynamics of a complex aircraft brake system: experimental and theoretical approach”, ASME 2003 Design Engineering Technical Conferences and Information in Engineering Conference, Chicago, Illinois, USA, 2003.
[5] Tuchinda A., “Development of validated models for brake squeal predictions”, Department of Mechanical Engineering, Imperial College, London, 2003.
[6] Giannini O., Massi F., “An experimental study on the brake squeal noise”, Università di Roma, Dipartimento di meccanica e aeronautica, Roma, 2004.
[7] Lee Y.S. et al., “A predictive tool to evaluate disc brake squeal propensity; Part 1,2,3”, International Journal of Vehicle Design, Vol. 31, No. 3, 2003.
[8] Bechi A., “Indagine sperimentale sulle vibrazioni flessionali di lame a disco durante il processo di affilatura”, Università di Pisa, DIMNP 2004.
[10] Malvano R., Spazzini P.G., “Fondamenti di acquisizione dati e introduzione al sistema LabVIEWTM”, Consiglio nazionale delle ricerche, 2003.
[11] Carmignani C., “Dinamica strutturale”, ETS, Pisa, 2001.
[12] Solartron Instruments, “Methods and applications of digital spectral techniques”, Schlumberger Electronics (UK) technical report 008, 1983.
[13] Bolzern P., Scattolini R., Schiavoni N., “Fondamenti di controlli automatici”, McGraw-Hill, 1998.
[14] Giannini O., Akay A.,Massi F., “Experimental analysis of brake squeal noise on a laboratori brake setup”, Journal of sound and vibration 292, 2006.
Software di calcolo Matlab 6.5
LabVIEW 6.1
Manuali
LabVIEW “Data Acquisition Basics Manual”, National Instruments, November 2001 LabVIEW “User Manual”, National Instruments, November 2001
RINGRAZIAMENTI
Desidero ringraziare i relatori Prof. Ing. Costantino Carmignani, Prof. Ing. Paola Forte e Ing. Francesco Frendo per il contributo scientifico apportato a questo studio e per la grande disponibilità mostrata nei miei confronti.
Desidero poi ringraziare i tecnici del laboratorio Sergio Martini, Roberto Minelli e Dario Mondini per il prezioso aiuto datomi nello svolgimento del lavoro.
Ringrazio infine tutti coloro che mi sono stati vicini e hanno creduto in me, e in particolare Sara per il sostegno morale durante questo lavoro e Valerio e Michele, compagni e amici veri.