UNIVERSITÀ DEGLI STUDI DI PISA
Facoltà di Ingegneria
Corso di laurea specialistica in Ingegneria dei Veicoli
Terrestri
Studio di fattibilità di sospensione
automobilistica con controllo della
cinematica
RELATORI:
Prof. Francesco FRENDO
Prof. Lucio TAPONECCO
Prof. Paolo BOLOGNESI
CANDIDATO:
Alan PIETRINI
RIASSUNTO ANALITICO
Il presente lavoro di tesi consiste nello studio di fattibilità di una sospensione automobilistica con controllo della cinematica. Utilizzando i dati costruttivi ricavati dal simulatore di guida presente nel DIMNP, tramite il software Adams®, sono stati calcolati gli sforzi nelle diverse condizioni di marcia delle sospensioni di due delle più diffuse architetture: il Mc Pherson e il Quadrilatero. Delle due soluzioni costruttive la seconda è risultata la più promettente mostrando carichi minori sugli snodi. Scelto quindi il Quadrilatero il passo successivo è stato lo studio approfondito del comportamento cinematico e dell‟effetto sugli angoli caratteristici di deriva e camber dello spostamento degli snodi. Ottenuti tali dati, è stata creata una serie di simulazioni di prova in ambiente Matlab® per determinare il controllo ottimale degli angoli, valutandone gli effetti positivi sulla dinamica del veicolo, per individuare le specifiche dell‟attuatore necessario a tale movimentazione e per verificare la caratteristica fail-safe del meccanismo. È stato infine ideato un cinematismo in grado di soddisfar le specifiche richieste dalle prove utilizzando gli attuatori elettrici attualmente presenti sul mercato.
ABSTRACT
Aim of this dissertation is to study the feasibility of an automobile suspension with control of the kinematics.
With Adams® software, using data derived from the DIMNP„s driving simulator, the joint loads of two of the most popular suspension architectures, Mc Pherson and Double Wishbone, have been calculated in different driving conditions.
The second solution being the most promising, showing lower loads on the joints, was chosen, then the next step was the detailed study of the kinematics and the effect on drift and camber angles of the movement of joints.
Obtained these data, a series of test simulations in Matlab® to determine the optimal control angles, has been created, evaluating the positive effects on vehicle dynamics to identify the specific actuator necessary for that movement and to verify the characteristic fail-safe ability
Eventually, a mechanism able to satisfy the specifications required by the tests, using electric actuators currently on the market, was developed.
SOMMARIO
RIASSUNTO ANALITICO ... I ABSTRACT ... II SOMMARIO ... IV 1. INTRODUZIONE ... 1 1.1. Le sospensioni. ... 11.2. Le sospensioni: veicolo sottoposto a forza laterale ... 2
1.3. Miglioramento della posizione della ruota: recupero di camber .... 6
1.4. Miglioramento della posizione della ruota: sospensioni a rigidezza modificabile ... 6
1.5. Miglioramento della posizione della ruota: Sospensioni a geometria modificabile ... 9
1.6. Miglioramento della posizione della ruota: il controllo diretto degli angoli ... 11
1.7. Scopo della Tesi ... 13
2. MODELLO ... 15
2.1. Modello in Matlab® del veicolo ... 15
2.2. Modello in Adams® delle sospensioni ... 17
3. ANALISI DEI CARICHI ... 21
3.1. Analisi degli sforzi: Quadrilatero ... 22
3.2. Analisi degli sforzi: Mc Pherson ... 31
3.3. Riassunto dei dati ... 36
4. ANALISI DELLA GEOMETRIA ... 39
4.1. Angoli caratteristici del Quadrilatero ... 39
4.2. Effetti dello spostamento sul punto D ... 43
4.3. Soluzione 1 : controllo indipendente degli angoli caratteristici tramite l‟abbassamento del braccetto di sterzo ... 45
4.4. Soluzione 2: controllo angoli caratteristici con sterzo proporzionale al camber tramite avanzamento del braccetto di sterzo ... 51
4.5. Soluzione 3: scatola di sterzo con rapporto variabile elettronicamente. ... 54
4.6. Scelta della soluzione finale ... 54
5. PROVE ... 56
5.1. Curva a velocità costante ... 56
5.1.1. Prova a 20 m/s ... 57
5.1.2. Prova a 30 m/s ... 60
5.1.3. Prova a 40 m/s ... 64
5.1.4. Riassunto dei dati ... 67
5.1.5. Ricerca dell‟attuazione ideale ... 70
5.1.6. Confronto con impostazione finale per l‟accelerazione laterale massima ... 76
5.2. Cambio di corsia ... 78
5.2.1. Prova a 20 m/s ... 79
5.2.2. Prova a 30 m/s ... 82
5.2.5. Ricerca dell‟attuazione ideale ... 87
5.2.6. Confronto con impostazione finale per cambio di corsia ... 91
6. SCELTA DELL‟AZIONAMENTO ... 92
6.1. Nuova cinematica di attuazione ... 94
6.2. Riepilogo dei vantaggi ... 98
7. CONCLUSIONI ... 99
Ringraziamenti ... 101
1. INTRODUZIONE
1.1. Le sospensioni.
Le moderne sospensioni automobilistiche sono il frutto di una ricerca tecnologica iniziata migliaia di anni fa. I primi esempi di sospensione, ovvero di un insieme di elementi colleganti ruote e telaio, risalgono infatti ai tempi dell‟antica Roma. Sebbene molto primitive e rudimentali, erano infatti composte da una semplice molla a balestra, erano già progettate per cercare di ottenere gli stessi obiettivi di quelle attuali: trasmettere adeguatamente le forze di contatto a terra e migliorare il comfort di guida.
La prima strategia adottata per ottenere questi obiettivi fu di interporre tra la cassa e le ruote un elemento elastico, inizialmente costituito da un molla a balestra in legno e progressivamente sostituito da elementi in acciaio.
La comparsa di un elemento in grado di ridurre anche le vibrazioni, ovvero l‟ammortizzatore, è avvenuta in tempi molto più recenti. Come è possibile vedere dalla Figura 1-1 la Ford T del 1908 ne era ancora sprovvista.
Figura 1-1 – Sospensione della Ford T in cui si nota il sistema ibrido con
molle sia elicoidali che a balestra
Il primo esempio di meccanismo smorzante applicato su di un veicolo risale alla fine dell‟800 e fu applicato su una bicicletta da un ingegnere
INTRODUZIONE
francese seguito pochi anni dopo dal tedesco Mors che l‟applicò per primo su di un automobile [18]. La diffusione di massa di tale concetto però inizia circa 30 anni dopo, con l‟introduzione sul mercato dello “shock eliminator” dell‟americana Monroe nel 1926.
Tutti questi sistemi si concentravano quindi sui soli aspetti di smorzamento e rigidezza
Con il passare degli anni e l‟affinarsi della tecnologia sono aumentati i requisiti dei sistemi di sospensione, soprattutto relativi al comportamento del veicolo sottoposto ad una forza laterale. Ha quindi preso maggiore importanza il controllo degli angoli caratteristici della ruota.
1.2. Le sospensioni: veicolo sottoposto a forza
laterale
Durante la marcia in curva, o in rettilineo su strada inclinata, il veicolo è sottoposto a una forza laterale che genera due effetti: l‟inclinazione della cassa e la deformazione dello penumatico.
INTRODUZIONE L‟inclinazione della cassa porta notevoli svantaggi: riduce il comfort dei passeggeri del veicolo e diminuisce la forza massima laterale trasmettibile a terra [17][10]
La forza laterale trasmessa a terra dipende infatti essenzialmente da quattro parametri: la forza verticale agente sulla ruota, il coefficiente d‟attrito dello pneumatico egli angoli di camber e di deriva.
Ovviamente, il coefficiente di attrito dello pneumatico è indipendente dal tipo di sospensione e dipende dalle caratteristiche costruttive dello stesso e dal tipo di terreno su cui il veicolo si sta spostando. La forza verticale invece è funzione non solo del peso del veicolo ma anche della rigidezza e dello smorzamento della singola sospensione e dell‟intero assale, come verrà spiegato più avanti.
Per quanto riguarda deriva e camber, invece, assumono sostanziale importanza le caratteristiche cinematiche della sospensione.
Figura 1-2 – Angoli caratteristici della ruota: Sterzo (δ), Deriva (α) e
Camber (γ) e Caster (τ).
Nella Figura 1-2 vengono individuati tali angoli più quello detto di caster o incidenza.
Nella parte a sinistra si vede il veicolo dall‟alto. Si definisce angolo di deriva α quello compreso tra il vettore relativo alla velocità di rotolamento della ruota (in rosso) e quella di avanzamento del veicolo (in azzurro). L‟angolo di sterzo δ è compreso invece tra la direzione dove punta
INTRODUZIONE l‟anteriore del veicolo (in verde) e la velocità di rotolamento della ruota (in rosso).
Nella parte centrale della figura si vede il veicolo frontalmente e si può notare l‟angolo di camber γ che intercorre tra la retta verticale (in verde) e l‟inclinazione della ruota (in rosso). Tipicamente quando la parte superiore della ruota è più vicina all‟interno del veicolo rispetto a quella inferiore si parla di camber negativo.
Nella parte destra della figura è invece mostrato il veicolo con l‟anteriore che punta verso destra. Si dice angolo di caster quello formato tra la verticale (in verde) e l‟asse di sterzo (in rosso) e si assume tipicamente positivo quando lo snodo superiore per cui passa l‟asse di sterzo è più arretrato rispetto allo snodo inferiore, come del resto accade in figura.
Quest‟angolo è collegato indirettamente alla forza laterale; tanto più è grande l‟angolo di caster tanto più l‟angolo di sterzo avrà influenza su quello di camber.
I valori ottimali di α e γ e per avere la forza laterale massima dipendono dalle caratteristiche del pneumatico: per quelli montati sulle comuni vetture di serie sono rispettivamente di 3° ~ 4° per la deriva e di -5° ~ -10° [10][17] per il camber. .
INTRODUZIONE Per meglio comprendere l‟effetto del camber si osservi la Figura 1-4: si nota come venga deformato lo pneumatico per effetto della forza laterale.
A ciò va anche sommata l‟inclinazione della cassa che porta la parte alta della ruota ad allontanarsi dal centro della curva. Tutto questo ha ovviamente effetti negativi sia sulla distribuzione della pressione dell‟impronta a terra sia sull‟usura dello pneumatico e vi si potrebbe porre rimedio inclinando la ruota in modo da far avvicinare la parte alta all‟interno della curva (camber negativo) come mostrato in Figura 1-5.
Figura 1-4 – Esempio di deformazione del pneumatico
Figura 1-5 – Miglioramento dell’impronta a terra e dell’andamento della
pressione dovuto al camber
Si riassumono ora le soluzioni tecnologiche esistente o in fase di studio per la risoluzione dei problemi precedentemente esposti.
INTRODUZIONE
1.3. Miglioramento della posizione della ruota:
recupero di camber
Una delle soluzioni più semplici al problema dell‟inclinazione della ruota è il progetto di una sospensione avente una cinematica in grado di offrire il cosidetto “recupero di camber”: durante la fase di compressione degli elementi elastici la ruota assume un camber negativo mentre in estensione assume valori positivi. Tarando adeguatamente questo comportamento si riesce a ottenere un‟angolazione migliore durante le curve, ma peggiore in caso di variazione di carico su tutto l‟assale, come nella marcia in salita o in discesa o in caso di carico non bilanciato del veicolo come si può facilmente vedere in Figura 1-6. Per questo motivo l‟entità del recupero di camber viene mantenuta piuttosto limitata, nell‟ordine di 2-3 gradi al massimo. Sospensioni caratterizzate da questo comportamento sono ad esempio il Quadrilatero e il Multilink mentre per il Mc Pherson si osserva un effetto molto più lieve se non nullo.
Figura 1-6 – Sospensione a Quadrilatero con recupero di camber in marcia
rettilinea (A) in curva (B) e in marcia rettilinea con aumento di carico (C)
1.4. Miglioramento della posizione della ruota:
sospensioni a rigidezza modificabile
Un sistema più evoluto è senza dubbio quello delle sospensioni autolivellanti il cui scopo è ridurre il moto di rollio della cassa variando la rigidezza delle sospensioni. Inizialmente si otteneva questo comportamento
INTRODUZIONE
tale campo con la Traction Avant del 1954, ha installato tale sistema sulla XM del 1989 denominandolo Hydractive suspension system.
Figura 1-7 - Citroen Hydractive
In tale veicolo le sospensioni erano costituite da 4 molle pneumatiche più altre 2 ausiliarie. Queste ultime potevano essere messe in comunicazione con le altre per avere un sistema più cedevole, ad esempio per migliorare il comfort di marcia in rettilineo, mentre in curva chiudendo il condotto che le univa alle altre, si otteneva un comportamento più rigido in grado di ridurre il rollio.
Un altro esempio dove compare anche la regolazione elettronica è il Mercedes Active body control composto da quattro gruppi molla ammortizzatore in serie con una camera fluida che aumenta la rigidezza degli assali per opporsi al rollio.
Figura 1-8 - Mercedes Active Body Control (ABC)
Questi sistemi senza dubbio efficaci non si dimostrano però efficienti in quanto richiedono oltre a un impianto pneumatico anche un importante
INTRODUZIONE
dispendio energetico. Nel tentativo di evitare questi problemi sono stati studiati sistemi elettromeccanici in grado di sostituirsi alle sospensioni penumatiche o in grado di evitare un costoso impianto.
L‟azienda Bose si è spinta ancora oltre creando i Linear Electric Dumpers ovvero dei complessi molla/ammortizzatore dove sia l‟elemento elastico che quello smorzante sono sostituiti da un attuatore lineare opportunamente pilotato per ottenere la caratteristica desiderata. In tal caso è persino possibile il recupero di parte dell‟energia dissipata nello smorzamento.
Figura 1-9 - Sistema Bose: Attuatore lineare, sospensione, assale
Un altro esempio che ha avuto peraltro maggiore diffusione sono gli Adaptive Dampings dell‟italiana Maserati. In questo caso la componente attiva si riduce alla regolazione della valvola che regola lo smorzamento dell‟ammortizzatore.
INTRODUZIONE
1.5. Miglioramento della posizione della ruota:
Sospensioni a geometria modificabile
Un'altra strada seguita per modificare la rigidezza delle sospensione con un modesto contributo energetico è quello della geometria variabile. Uno dei primissimi esempi è rappresentato da una moto del 1965, la Velocette Thruxton, mostrata in Fig. 11. Tale meccanismo, alquanto semplice, permetteva di variare l‟angolo con cui il gruppo molla ammortizzatore andava ad agire sul telaio. Tale operazione si effettuava manualmente, allentando la manopola A che teneva la sospensione ferma in posizione e fissandolo in un altro punto dopo averlo fatto scorrere nell‟apposita gola B.
:
Figura 1-11 – La sospensione a geometria modificabile della Velocette
In seguito, diverse soluzioni hanno reso automatico il processo di regolazione della geometria, conservando però il difetto della scarsa efficienza. Più evoluto è il BMW “Dynamic Drive” costituito da una barra antirollio la cui rigidezza viene modificata da un attuatore elettrico.
INTRODUZIONE
Figura 1-12 - BMW Dynamic Drive
Un‟interessante soluzione a questo problema è senza dubbio la sospensione Delft Active Suspension (DAS). Tale sistema sfrutta un attuatore elettrico per spostare il punto d‟applicazione della molla antagonista al peso. Un aspetto interessante di tale architettura è evidenziato in Figura 1-13.
Figura 1-13 - Il concetto alla base della DAS
Tale soluzione è stata pensata per non fare compiere lavoro all‟attuatore in quanto quest‟ultimo compie uno spostamento perpendicolare alla forza. Questo tipo di sospensione può essere utilizzataa sia per migliorare il comfort sia per massimizzare la forza latrale trasmissibile dagli pneumatici evitando il rollio. Sostanzialmente tale sospensione è efficace per le sollecitazioni a bassa frequenza, migliorando quindi il “ride” comfort. Le prime realizzazioni di tale sospensione risalgono al 1995 e rivelarono da una parte la fattibilità tecnica del progetto mentre dall‟altra ne evidenziarono la
INTRODUZIONE
difficile adozione nei veicoli di serie. Successivamente, nel 2001, la stessa università intraprese uno studio, terminato nel 2004, per inserire l‟architettura DAS in una normale Mc Pherson.
Atri studi, come ad esempio quelli effettuati da Watanabe e Sharp[7] hanno dimostrato come le sospensioni a geometria variabile a fronte di un modesto aumento di peso e di consumo energetico riescano a fornire ottime prestazioni, andando oltre gli svantaggi e i compromessi normalmente accettati per le sospensioni passive. Nella loro analisi hanno sperimentato diversi sistemi di regolazione, dal semplice proporzionale/differenziale a quello con capacità di autoapprendimento. Al centro dello studio rimane comunque il semplice concetto dello spostamento del punto di contatto del gruppo molla ammortizzatore, concetto non dissimile da quello della Velocette del 1965, attuato da un servocomando elettrico gestito da un sofisticato sistema di regolazione e controllo.
Le soluzioni presentate permettono quindi di mantenere il veicolo sostanzialmente parallelo al terreno riducendo i problemi legati all‟inclinazione della cassa ma presentano il problema sostanziale che irrigidendo la sospensione si riduce il comfort
Tutti i sistemi presentati sin‟ora possono quindi andare incontro a questi incovenienti. Per migliorare ulteriormente il comportamento della vettura si è quindi pensato di esercitare un controllo diretto sugli angoli della ruota.
1.6. Miglioramento della posizione della ruota: il
controllo diretto degli angoli
Diversi studi sono stati effettuati nel campo della cinematica variabile: Minaker e Anderson [11] hanno effettuato uno studio preliminare che mostra un‟altra valida applicazione di questo concetto.
Obiettivo dello studio era di verificare l‟effetto della variazione dei punti di ancoraggio della sospensione al telaio. Tramite un modello di veicoli sono state effettuate diverse prove variando la geometria della sospensione e sono state ottenute modifiche sostanziali del angolo di rollio del veicolo.
INTRODUZIONE
Figura 1-14 – Il modello utilizzato da Minaker e Anderson
Un altro studio ancora più pertinente al controllo diretto degli angoli della ruota è quello pubblicato da Lee[14] relativo all AKCS (Active Kinematic Control System). Questo sistema prevedeva il controllo degli angoli di assetto delle quattro ruote attraverso lo spostamento di uno dei braccetti perpendicolarmente allo sforzo. Particolare attenzione viene data anche allo spostamento del centro di rollio del veicolo e alla seguente variazione di rigidezza al rollio delle sospensioni ma non viene effettuato nessuno studio sull‟entità delle forze richieste a tale attuatore.
INTRODUZIONE
Sempre Lee[12] alcuni anni dopo ha pubblicato uno studio sullo sviluppo della AGS (Active Geometry Suspension) che mostrava i vantaggi dell‟ottimizzazione dell‟angolo di convergenza delle ruote posteriori tramite un attuatore elettromeccanico. Tale sistema è stato effettivamente testato su un veicolo reale dall‟azienda Hyundai confermando i miglioramenti dello studio teorico.
Ciò ha portato al miglioramento dell‟angolo di deriva (side slip) ma non ha avuto nessun effetto sul camber della ruota.
La gestione del controllo della sospensione a geometria attiva è stata affrontata anche da Goodarzi et al.[13]. Oggetto dello studio era l‟applicazione su un veicolo reale dove, in particolare, si agiva sulla variazione di altezza dello snodo di una sospensione multilink posteriore di un SUV. In questo caso l‟attuatore imprimeva uno spostamento perpendicolare allo sforzo in modo da ridurre il lavoro richiesto.
L‟influenza della geometria della sospensione sulla stabilità al rollio del veicolo è stata approfondita anche da Taehyun e Pradheep[15].
Nella loro analisi hanno utilizzato un modello realizzato all‟interno del software Adams® sottoposto a prove di inversione di marcia e hanno analizzato l‟effetto della variazione di diversi parametri come il camber, il kingpin e il caster ricercando infine la combinazione di valori ottimali tramite Adams/Insight.
1.7. Scopo della Tesi
Obbiettivo della presente tesi è lo studio della fattibilità di una sospensione automobilistica con controllo della cinematica.
Nel presente lavoro si intende andare oltre le limitazioni degli studi e delle realizzazioni precedenti. Diverse soluzioni definite a geometria variabile infatti si limitano a cambiare la geometria del sistema molla smorzatore al fine di variare la rigidezza della sospensione o dell‟assale. Altri studi si sono invece concentrati sull‟effetto della variazione del centro di rollio sulla dinamica del veicolo senza analizzare le forze in gioco e quindi la fattibilità del sistema. Altri ancora che più si sono avvicinati
INTRODUZIONE all‟idea di sospensione a cinematica controllata si sono limitati ad una modifica della sterzatura posteriore, con l‟attuatore che opera in direzione perpendicolare alla forza al fine di ridurre la richiesta di potenza, ottenendo di fatto una sospensione di cui si controlla soltanto la sterzatura.
Infine chi si è più avvicinato ad ottenere un angolo ottimale di camber delle ruote si è comunque limitato a mantenerle verticali a terra aumentando la rigidezza delle sospensioni esterne alla curva, modificando il comfort di guida.
In questa tesi si è quindi investigato sulla possibilità di controllare tutti gli angoli della ruota, comprendendo anche il camber, analizzando in particolare:
Gli sforzi necessari ad attuare il cambio di geometria
L‟entità dello spostamento da applicare agli snodi per ottenere variazioni significative di prestazioni
La velocità con cui effettuare tale spostamento
Per valutare i miglioramenti introdotti dal sistema di controllo della geometria sono stati scelti due obiettivi fondamentali, verificati con apposite simulazioni ovvero:
Aumento della accelerazione laterale massima a regime del veicolo ovvero il miglioramento delle caratteristiche di handling
Riduzione dello spazio di reazione per evitare ostacoli ovvero aumento della sicurezza del veicolo
Alla fine del presente lavoro viene quindi presentato un modello di meccanismo in grado di soddisfare le specifiche. .
2. MODELLO
Per analizzare le caratteristiche del veicolo e delle sospensioni si sono utilizzati due modelli: il primo, presente al DIMNAP[6], compilato col software Matlab® e il secondo compilato col software Adams®.
In particolare il primo modello è stato utilizzato per determinare le caratteristiche del veicolo con e senza il controllo della cinematica della sospensione, tramite la creazione e svolgimento di apposite prove descritte nel proseguo. Oltre a ciò, tale software è stato utilizzato anche per ottenere la precisa posizione degli snodi delle sospensioni e le caratteristiche delle sospensioni del veicolo originale, essendo presenti tali dati in apposite tabelle all‟interno del modello.
Essendo quest‟ultimo molto complesso ci si soffermerà soltanto nella spiegazione dei campi fondamentali utilizzati nella presente tesi ovvero la cinematica delle sospensioni, il modello di pneumatico e il modello di veicolo dinamico mentre si rimanda all‟opera stessa per maggior informazioni sugli altri aspetti del veicolo.
Il secondo modello, implementato invece in Adams® è stato utilizzato per avere una migliore visualizzazione della cinematica delle sospensioni da cui decidere come e dove intervenire con l‟attuazione elettrica e per poter conoscere in dettaglio gli andamenti degli sforzi nei vari snodi.
2.1. Modello in Matlab® del veicolo
Si è utilizzato un modello di veicolo composto da 5 corpi rigidi dotati di inerzia:
Il telaio (massa sospesa)
Le 4 ruote (massa non sospesa)
Il modello risolve le equazioni di equilibrio di questi corpi partendo dalle forze esterne che il veicolo riceve dal contatto tra le ruote e la strada, dai freni, dal motore e dalle forze aerodinamiche. .
MODELLO
In totale il modello dispone di 14 gradi di libertà così suddivisi:
6 g.d.l. per la posizione del telaio e l‟orientamento rispetto al sistema di coordinate globali
4 g.d.l. per la posizione relativa delle ruote rispetto al telaio dell‟auto (lo scuotimento di ciascuna ruota)
4 g.d.l. la rotazione delle ruote.
In particolare a seconda del tipo di sospensione e della posizione degli snodi il modello calcola una Look-up-Table che dato lo scuotimento ricava la variazione degli angoli di camber e sterzo della ruota. Lo scuotimento è ottenuto a sua volta da altre Look-up-Table che lo forniscono dato il carico verticale. Nel caso si tratti di ruote anteriori gli angoli dipendono ovviamente anche dall‟angolo di sterzo.
Figura 2-1 – Funzionamento del modello per le ruote posteriori
MODELLO
2.2. Modello in Adams
®delle sospensioni
Per potere analizzare più in dettaglio il comportamento delle sospensioni si è deciso di utilizzare il software Adams®.
Poiché nel modello presente al DIMNP sono disponibili due tipi di sospensioni, ovvero il Mc Pherson e il Quadrilatero si è deciso di studiarne il comportamento di entrambe.
Il modello utilizzato in Matlab® non calcola la caratteristica ridotta a terra a partire dalle caratteristiche della molla e dell‟ammortizzatore utilizzando la cinematica della sospensione ma dalle Look up table ricavate da dati sperimentali e inserite precedentemente all‟avvio della simulazione.
Questa soluzione ha rappresentato un problema nello studio degli sforzi in quanto per ricavare gli sforzi reali sugli snodi occorre conoscere le forze sviluppate da molla e ammortizzatore e il loro punto di applicazione.
Il problema è stato risolto utilizzando il software Adams View® per riprodurre la geometria di tali elementi.
Osservando la geometria della sospensione si è scelto di montare un gruppo molla-ammortizzatore in una posizione il più possibile simile a quelle delle sospensioni reali. Si è quindi tarata la rigidezza (con effetto “tamponata”) e lo smorzamento per ottenere risultati pressoché coincidente con quelli ricavati dalle look up table.
Figura 2-3 – Immagine in Adams della sospensione a Quadrilatero (A) e
MODELLO
Per quanto riguarda il McPherson l‟operazione è piuttosto semplice in quanto vi è una corrispondenza quasi unitaria tra la caratteristica ridotta a terra e quella effettiva del complesso ammortizzatore/molla oltre al fatto che la posizione del duomo e dello snodo al mozzo della ruota sono noti dal modello.
Il risultato ottenuto per il quadrilatero è mostrato in Figura 2-4 – Confronto tra la caratteristica del quadrilatero ottenuta con Adams® e quella presente nelle Look-up-Table in Matlab mentre in
Figura 2-5 viene riportato quello del McPherson.
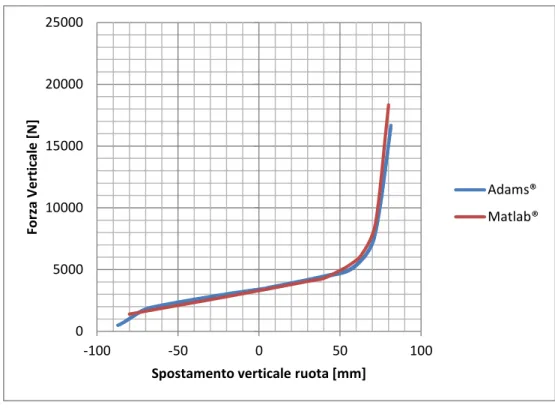
Per il Quadrilatero si è invece deciso la posizione degli elementi elastici e smorzanti affinché si ottenesse un ingombro ridotto compatibile con un utilizzo su un veicolo reale e si è poi proceduto a dimensionare adeguatamente le caratteristiche di tali elementi al fine di ottenere la curva ridotta a terra desiderata.
Figura 2-4 – Confronto tra la caratteristica del quadrilatero ottenuta con
Adams® e quella presente nelle Look-up-Table in Matlab® -2000 0 2000 4000 6000 8000 10000 12000 14000 16000 -100 -50 0 50 100 Fo rza Ver tical e [ N ]
Spostamento verticale ruota [mm]
Adams® Matlab®
MODELLO
Figura 2-5 – Confronto tra la caratteristica del McPherson ottenuta con
Adams® e quella presente nelle Look-up-Table in Matlab®
Di seguito si riportano infine per completezza i punti delle posizioni degli snodi utilizzati in entrambi i modelli.
Tipo di
sospensione Quadrilatero Mc Pherson
Asse X Y Z X Y Z Punto A 50,5 385,0 -63,0 -2033,4 542,7 -28,9 Punto B -218,5 385,0 -39,5 -2473,5 117,6 -27,6 Punto C 12,7 719,0 -64,2 -2474,4 677,3 -42,1 Punto D -119,3 552,7 440,4 -2589,4 549,5 567,2 Punto E -219,2 628,9 455,4 -2534,8 630,6 29,2 Punto F -23,6 661,9 457,4 -2648,9 85,3 -37,0 Punto G -160,0 458,3 65,0 -2650,6 677,7 -58,2 Punto H -138,8 694,9 74,8 -2540,0 745,3 31,1 Punto I 5,5 754,3 40,3
Figura 2-6 – Tabella con la posizione dei vari snodi delle due tipologie di
sospensioni 0 5000 10000 15000 20000 25000 -100 -50 0 50 100 Fo rza Ver tical e [ N ]
Spostamento verticale ruota [mm]
Adams® Matlab®
MODELLO
Per quanto riguarda lo smorzamento, infine, si è seguito un procedimento simile. Si è preso a riferimento la look up table presente nel modello in Matlab® e si è provati diversi valori dello smorzamento finchè non si sono ottenute caratteristiche simili. Ovviamente in questo caso quest‟ultime sono funzioni non dello spostamento ma della velocità dello scotimento.
3. ANALISI DEI CARICHI
Per poter decidere dove intervenire per modificare la geometria della sospensione si è svolta un analisi degli sforzi sugli snodi collegati alla cassa del veicolo.
Si è valutata la condizione di sforzo con veicolo fermo, in caso di frenata e in curva al fine di evidenziare i punti critici nelle varie condizioni.
Per la prova da fermo si è scelto di imporre alla sospensione già caricata col peso del veicolo un escursione di 80 millimetri in compressione e 80 in distensione completando il ciclo di carico e scarico in 1 secondo per tenere conto anche dell‟effetto smorzante dell‟ammortizzatore.
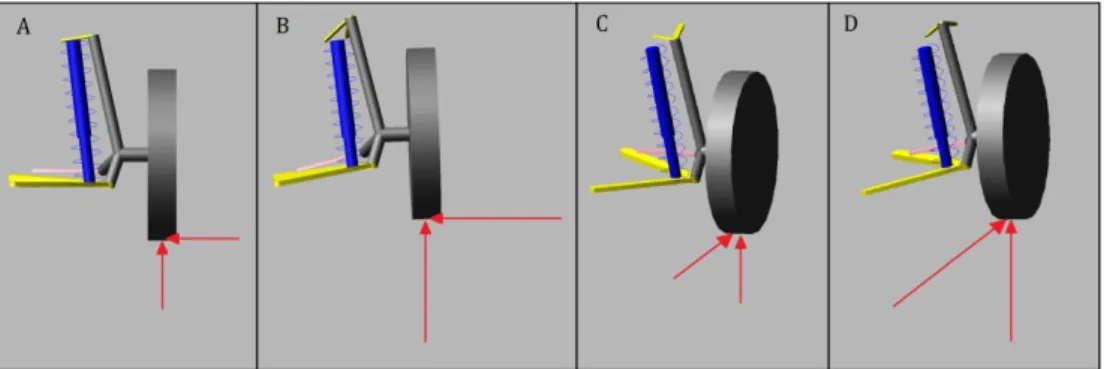
Per la prova in frenata si è invece aggiunta una forza longitudinale pari al carico verticale agente moltiplicato per il coefficiente di attrito (considerato in questo caso unitario) mentre in caso di curva la forza è stata aggiunta lateralmente (Figura 3-1).
Figura 3-1 – Inserimento della forza laterale (A e B) e longitudinale (C
e D) nel modello in Adams®. Si nota la proporzionalità con la forza verticale agente sulla ruota
Nel modello la ruota è stata spostata verso l‟esterno e rappresentata molto sottile per una visione migliore della cinematica ma le forze di contatto sono state applicate nel punto reale del centro impronta, ovvero spostate verso l‟interno del veicolo.
Di seguito sono riportati tramite dei grafici e una tabella riassuntiva finale i risultati delle prove su entrambi i tipi di sospensioni.
ANALISI DEI CARICHI
3.1. Analisi degli sforzi: Quadrilatero
Di seguito vengono riportati i grafici degli sforzi ricavati nei vari snodi.
Figura 3-2 - Snodi su cui si è svolta l'analisi
Figura 3-3 - Sforzi sullo snodo A
-3000 -2000 -1000 0 1000 2000 3000 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z
ANALISI DEI CARICHI
Figura 3-4 - Sforzi sullo snodo B
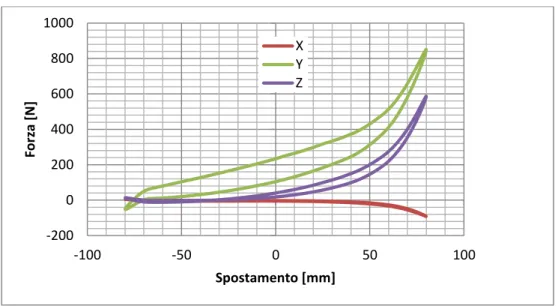
Figura 3-5 - Sforzi sullo snodo D
-100 0 100 200 300 400 500 600 700 800 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z -200 -100 0 100 200 300 400 500 600 700 800 900 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z
ANALISI DEI CARICHI
Dai grafici precedenti si nota una caratteristica fondamentale del quadrilatero: in curva gli sforzi sullo snodo D rispetto all‟asse y sono piccoli e negativi.
Ipotizzando un braccetto F-D cedevole la ruota tenderebbe quindi ad assumere un camber maggiore. L‟attuatore dovrebbe quindi non contrastare lo sforzo ma assecondarlo, con notevoli vantaggi in termini di potenza necessaria e quindi di costi, ingombri e sicurezza.
Questo comportamento è meglio illustrato nella figura seguente
Figura 3-6 – Equilibrio delle forze in curva
Scrivendo le equazioni del caso semplificato mostrato sopra, relative all‟equilibrio delle forze verticali e dei momenti in B si ottiene
∑ ( )
∑
Essendo poi Fk ≈ Fz e μ ≈1 si ottiene facilmente:
( )
ANALISI DEI CARICHI
Poiché è sempre h2 > h1 , H1 sarà positivo quando l2 > h1+l1, condizione rispettata nel nostro caso.
Infine per quanto riguarda lo snodo E gli sforzi sono i seguenti:
Figura 3-7 - Sforzi sullo snodo E
Si riporta per completezza anche la caratteristica finale della sospensione ridotta a terra completa di smorzamento. Per ottenere questa curva si è aggiunto l‟effetto dell‟ammortizzatore come nelle LUT contenute nella simulazione in Matlab®. Lo spostamento è stato imposto ad andamento sinusoidale con la seguente legge:
(3.1) ( )
Si è infatti ritenuto indicativo l‟andamento delle sollecitazioni relativi a un oscillazione completa avvenuta in un secondo essendo una condizione di frequente utilizzo ed essendo simile al periodo proprio della ruota
-500 -400 -300 -200 -100 0 100 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z
ANALISI DEI CARICHI
Figura 3-8 – Caratteristica della sospensione a Quadrilatero con
smorzamento
Si sono poi analizzati gli sforzi a cui sono sottoposti i giunti in caso di marcia in curva e in caso di frenata.
A tal fine si è applicato nel punto di contatto a terra della ruota una forza laterale o longitudinale uguale a quella applicata verticalmente dal pneumatico, considerando quindi il coefficiente di attrito tra pneumatico e strada uguale a 1.
Figura 3-9 – Impostazioni in Matlab per applicare la forza laterale
-2000 0 2000 4000 6000 8000 10000 12000 14000 16000 -100 -50 0 50 100 Fo rza Ver tical e [ N ]
ANALISI DEI CARICHI
Si riportano di seguito i grafici relativi alla marcia in curva:
Figura 3-10 - Sforzi sullo snodo A
Figura 3-11 - Sforzi sullo snodo B
-8000 -6000 -4000 -2000 0 2000 4000 6000 8000 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z -1000 0 1000 2000 3000 4000 5000 6000 7000 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z
ANALISI DEI CARICHI
Figura 3-12 - Sforzi sullo snodo D
Figura 3-13 - Sforzi sullo snodo E
-5000 -4000 -3000 -2000 -1000 0 1000 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z -500 0 500 1000 1500 2000 2500 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z
ANALISI DEI CARICHI
Di seguito sono invece mostrati gli sforzi per quanto riguarda la frenata:
Figura 3-14 - Sforzi sullo snodo A
Figura 3-15 - Sforzi sullo snodo B
-20000 -15000 -10000 -5000 0 5000 10000 15000 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z -2000 0 2000 4000 6000 8000 10000 12000 14000 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z
ANALISI DEI CARICHI
Figura 3-16 - Sforzi sullo snodo D
Figura 3-17 - Sforzi sullo snodo E
-400 -200 0 200 400 600 800 1000 1200 1400 1600 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z -4000 -3500 -3000 -2500 -2000 -1500 -1000 -500 0 500 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z
ANALISI DEI CARICHI
3.2. Analisi degli sforzi: Mc Pherson
Per quanto riguarda il McPherson si sono invece analizzati i 3 punti A, B e D. In particolare l‟ultimo punto è stato calcolato per completezza di trattazione in quanto ritenuto di difficile spostamento visto il poco spazio consentito dalla normale installazione.
Figura 3-18 – La sospensione Mc Pherson
Come per la sospensione Mc Pherson riportiamo di seguito i grafici dei vari sforzi relativi a tutti i punti.
Figura 3-19 - Sforzi sullo snodo A
-1000 -800 -600 -400 -200 0 200 400 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y
ANALISI DEI CARICHI
Figura 3-20 - Sforzi sullo snodo B
Figura 3-21 - Sforzi sullo snodo D
-600 -400 -200 0 200 400 600 800 1000 1200 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z -12000 -10000 -8000 -6000 -4000 -2000 0 2000 4000 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z
ANALISI DEI CARICHI Segue la caratteristica dell‟assale con applicato lo smorzamento. Lo spostamento è stato imposto ad andamento sinusoidale con la seguente legge con cui è stato imposto al quadrilatero ovvero:
(3.1) ( )
Figura 3-22 – Caratteristica dell’assale Mc Pherson con smorzamento
Si riportano di seguito i dati relativi alla marcia in curva:
Figura 3-23 - Sforzi sullo snodo A
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] -2000 -1000 0 1000 2000 3000 4000 5000 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z
ANALISI DEI CARICHI
Figura 3-24 - Sforzi sullo snodo B
Figura 3-25 - Sforzi sullo snodo D
Invece per quanto riguarda la frenata:
-6000 -4000 -2000 0 2000 4000 6000 8000 10000 12000 14000 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z -12000 -10000 -8000 -6000 -4000 -2000 0 2000 4000 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z
ANALISI DEI CARICHI
Figura 3-26 - Sforzi sullo snodo A
Figura 3-27 - Sforzi sullo snodo B
0 2000 4000 6000 8000 10000 12000 14000 16000 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z -7000 -6000 -5000 -4000 -3000 -2000 -1000 0 1000 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z
ANALISI DEI CARICHI
Figura 3-28 - Sforzi sullo snodo D
3.3. Riassunto dei dati
Di seguito le tabelle con raccolti gli sforzi in Newton per le due sospensioni suddivise per i vari snodi e per le condizioni di prova.
Tab 4,1 Quadrilatero
Fermo Frenata Curva
Snodo Max Min Max Min Max Max Ax 200 -100 2000 400 -400 -1600 Ay -400 -1500 -15000 -5000 10000 2000 Az 2600 500 6000 -100 1200 -400 Bx 340 160 9000 3500 1800 300 By 420 60 14000 4500 2600 300 Bz -20 -180 1000 -4500 0 -900 Dx 0 -40 0 -100 600 0 Dy 820 180 1400 400 -5000 -1000 Dz 180 -120 300 -200 1600 -600 Ex 30 -50 -700 -2500 -100 -800 Ey -100 -220 -200 -700 3000 400 Ez 70 -70 1200 -500 400 -600
Figura 3-29 – Tabella degli sforzi per il Quadrilatero
-12000 -10000 -8000 -6000 -4000 -2000 0 2000 4000 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z
ANALISI DEI CARICHI
Si può notare come scegliendo di agire sullo snodo D del Quadrilatero la sollecitazione massima sarà di circa 6000 N mentre sul E di 3000 N.
Scegliendo invece lo snodo A o B del Mc Pherson si hanno sollecitazione di circa 11000 N.
Tab 4,2 Mc Pherson
Fermo Frenata Curva
Snodo Max Min Max Min Max Max Ax 200 -780 13000 1600 4600 600 Ay 80 -80 800 4000 1600 200 Az -600 -900 400 1600 0 -100 Bx 200 -100 -800 -6600 -200 -5000 By 100 -500 -600 -4600 3000 11000 Bz 1060 40 400 -200 -1200 -3600 Dx 400 0 800 0 0 -300 Dy 1800 -400 1800 -300 1800 -400 Dz -400 -11000 -400 -11000 -600 -11000
Figura 3-30 – Tabella degli sforzi per il Mac Pherson
Ovviamente questi dati sono cautelativi, in quanto si considerano condizioni di utilizzo estreme, con la quasi totalità del peso della vettura su una singola ruota. Riducendo invece l‟escursione a circa 50 mm, condizione assai più frequente e comune di utilizzo, le forze si riducono a circa un terzo di quelle presentate in tabella: nella successiva scelta e dimensionamento dell‟attuatore elettrico, qualora le potenzialità attuali di quest‟ultimo non consentissero di utilizzarlo per tutta l‟escursione della sospensione, si provvederà comunque a rendere il sistema sicuro per ogni condizione di sforzo riducendo al più il campo di intervento. Si cercherà quindi di renderlo capace di sopportare con i dovuti margini di sicurezza gli sforzi della sospensione ai suoi estremi ma di fargli spostare lo snodo scelto soltanto nella parte centrale dell‟escursione. La scelta di installare il meccanismo sullo snodo D sembra la più promettente.
ANALISI DEI CARICHI
Risulta infine interessante il fatto che lo sforzo sullo snodo D sia negativo; ciò significa che durante la prova la sospensione tende ad aumentare il proprio camber e ciò agevola il meccanismo.
4. ANALISI DELLA GEOMETRIA
Oltre agli sforzi di ogni snodo si sono calcolati i vari angoli caratteristici della ruota e gli effetti su quest‟ultime dell‟installazione del meccanismo.
Innanzitutto si è studiato il comportamento della sospensione nella sua configurazione originale per poter in seguito valutare le modifiche introdotte dall‟azionamento, considerando anche il comportamento in caso di guasto ovvero di immobilizzazione di quest‟ultimo
4.1. Angoli caratteristici del Quadrilatero
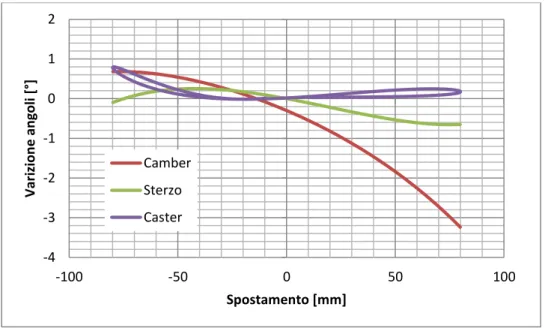
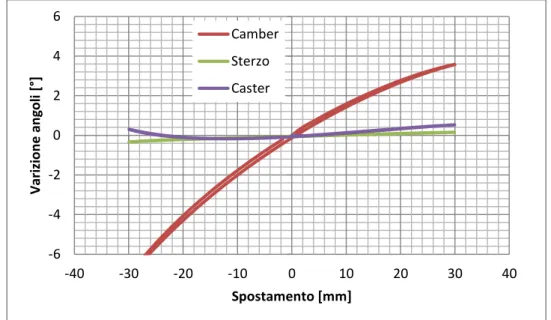
Si è diviso lo studio della sospensione ipotizzando il possibile uso sia all‟anteriore che al posteriore. Quando la sospensione è montata sull‟assale posteriore è piuttosto semplice ricavarsi i vari angoli, essendo quest‟ultimi funzione solo dello spostamento verticale della ruota.
Figura 4-1 – Variazione degli angoli di caster, camber e convergenza al
variare dello scuotimento della sospensione.
Montando invece la sospensione all‟anteriore la studio diventa più complesso essendo gli angoli della ruota non più funzione soltanto dello scuotimento ma anche dell‟angolo di sterzo. .
-4 -3 -2 -1 0 1 2 -100 -50 0 50 100 Var izi o n e an go li [° ] Spostamento [mm] Camber Sterzo Caster
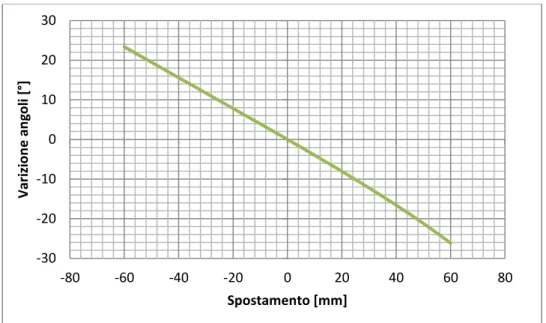
ANALISI DELLA GEOMETRIA Per avere un idea dell‟effetto combinato di queste due variabili si è quindi deciso di analizzare gli angoli al variare dello scuotimento con diversi spostamenti del braccetto di sterzo. In particolare si è scelta un escursione di quest‟ultimo di 120 mm (da -60mm a +60mm) corrispondenti come è possibile vedere in Fig. 4.2 a circa 50° di angolo di sterzo della ruota.
Figura 4-2 – Variazione dell’angolo di sterzo allo spostamento del
braccetto di sterzo.
Figura 4-3 – Variazione degli angoli di camber e caster allo
spostamento del braccetto di sterzo. -30 -20 -10 0 10 20 30 -80 -60 -40 -20 0 20 40 60 80 Var izi o n e an go li [° ] Spostamento [mm] -4 -3 -2 -1 0 1 2 3 -80 -60 -40 -20 0 20 40 60 80 Var izi o n e an go li [° ] Spostamento [mm] Camber Caster
ANALISI DELLA GEOMETRIA
Considerando un tipico rapporto di riduzione di 1 a 20, a ciò corrisponde un angolo volante di circa 1000°, in modo da coprire la quasi totalità delle situazioni possibili durante l‟utilizzo.
Per il segno dello spostamento del braccetto si è scelto di seguire quello della terna di orientamento principale, essendo quindi il braccetto collegato posteriormente all‟asse di sterzo ed analizzando la sospensione anteriore sinistra, uno spostamento negativo porta il veicolo a curvare verso destra e quindi rende esterna alla curva la sospensione oggetto dell‟analisi.
Stessa scelta è stata fatta anche per lo scuotimento: uno spostamento positivo della ruota corrisponde alla compressione della sospensione.
Per quanto riguarda il segno del camber e del caster continua a valere quanto espresso nell‟introduzione, ovvero a un camber negativo corrisponde la parte alta della ruota che si avvicina al centro curva e per un caster positivo corrisponde lo snodo superiore dell‟asse di sterzo spostato all‟indietro rispetto allo snodo inferiore.
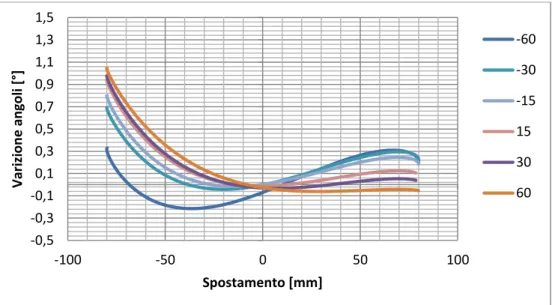
Nel grafico sotto viene mostrato l‟effetto sul camber
Figura 4-4 – Variazione dell’angolo di camber in funzione dello
spostamento verticale della ruota con diversi valori dello spostamento del braccetto di sterzo. -4 -3 -2 -1 0 1 2 -100 -50 0 50 100 Var izi o n e an go li [° ] Spostamento [mm] -60 -30 -15 15 30 60
ANALISI DELLA GEOMETRIA
Osservando la fase di compressione della sospensione ( a destra in figura) si può notare come via sia una riduzione del recupero di camber all‟aumentare della sterzata mentre in fase di espansione vi sia un aumento.
Questo porterà quindi la ruota esterna ad avere un angolo di camber peggiore rispetto a quella interna, comportamento non certo favorevole considerato che la ruota avente il maggior effetto sul veicolo è quella in compressione, essendo più caricata verticalmente. L‟effetto comunque si riduce all‟aumentare della velocità, in quanto per avere la stessa accelerazione laterale, e quindi lo stesso trasferimento di carico, sarà sufficiente un angolo di sterzo minore.
Osservando invece il comportamento dell‟angolo di sterzo relativo allo scuotimento della sospensione si nota che quando la sospensione oggetto dell‟analisi è quella esterna alla curva, all‟aumentare dello sterzo imposto dal volante, la riduzione dello sterzo dovuta allo scuotimento sia minore
Figura 4-5 – Variazione dell’angolo di sterzo in funzione dello
spostamento verticale della ruota con diversi valori dello spostamento del braccetto di sterzo.
Alle alte velocità quindi il trasferimento di carico produrra un effetto sottosterzante maggiore che alle basse velocità..
-2 -1,5 -1 -0,5 0 0,5 1 -100 -50 0 50 100 Va ri zi on e angol i [ °] Spostamento [mm] -60 -30 -15 15 30 60
ANALISI DELLA GEOMETRIA L‟escursione dell‟angolo di caster invece rimane sempre molto limitata, dell‟ordine di un grado. Considerando che tale angolo non ha effetto diretto sulla massima forza laterale, ma agisce variando il rapporto tra sterzo e camber, si può affermare che non vi siano effetti notevoli sul comportamento dipendente dallo scuotimento al variare dell‟angolo di sterzo imposto.
Figura 4-6 – Variazione dell’angolo di caster in funzione dello
spostamento verticale della ruota con diversi valori dello spostamento del braccetto di sterzo.
Svolta l‟analisi del comportamento della ruota sia in funzione dello scuotimento della sospensione che dello spostamento del braccetto di sterzo si è quindi passati a studiare l‟effetto dello spostamento del punto D.
4.2. Effetti dello spostamento sul punto D
Scelto di controllare la posizione dello snodo D si sono analizzate le variazioni degli angoli tipici della ruota conseguenti allo spostamento dello snodo.
La traiettoria seguita dallo snodo è stata imposta circolare, con centro nello snodo E in modo da semplificare la realizzazione del cinematismo.
-0,5 -0,3 -0,1 0,1 0,3 0,5 0,7 0,9 1,1 1,3 1,5 -100 -50 0 50 100 Va ri zi on e angol i [ °] Spostamento [mm] -60 -30 -15 15 30 60
ANALISI DELLA GEOMETRIA
Nel seguente grafico le variazioni di camber, convergenza e caster al variare della lunghezza del braccetto DF nel quadrilatero.
Figura 4-7 – Variazione degli angoli di caster camber e convergenza al
variare della lunghezza del braccetto DF
Dalla Figura 4-7 si può notare la corrispondenza quasi lineare tra lo spostamento dello snodo e la variazioni degli angoli da cui si è deciso di inserire tre coefficienti in modo da poter passare facilmente dall‟angolo in gradi alla variazione di lunghezza in mm:
(1.3)
(1.4)
(1.5)
Con:
kgγ = Coefficiente di riduzione da angoli a mm per quanto concerne il camber -10 -8 -6 -4 -2 0 2 4 6 8 10 -60 -40 -20 0 20 40 60 Var izi o n e an go li [° ] Spostamento [mm] Camber Caster Sterzo
ANALISI DELLA GEOMETRIA
kgsterzo = Coefficiente di riduzione da angoli a mm per quanto concerne il camber
kgcast = Coefficiente di riduzione da angoli a mm per quanto concerne il camber
Questi coefficienti risultano assai utili nella successiva fase di messa a punto del sistema ovvero quando si cercherà di variare gli angoli caratteristici della ruota potendo subito conoscere lo spostamento in mm necessario per ottenere l‟angolazione desiderata. Permettono anche di capire che a una diminuzione di camber dovuto al meccanismo corrisponde anche un aumento di sterzo.
Ovviamente va considerato che tali coefficienti potrebbero variare anche in funzione dell‟angolo di sterzo ma già nella configurazione con sterzo nullo si può vedere come questa relazione va contro l‟obiettivo ricercato nella tesi ovvero il controllo indipendente degli angoli caratteristici.
Quindi prima di studiare gli effetti dell‟azione di sterzo si sono prese in considerazione diverse soluzioni.
4.3. Soluzione 1 : controllo indipendente degli
angoli caratteristici tramite l’abbassamento del
braccetto di sterzo
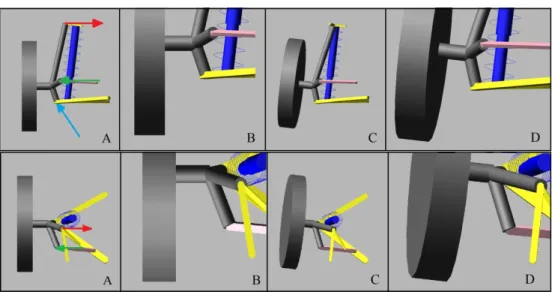
Si può facilmente intuire, osservando le figure sottostanti, come avvicinando lo snodo superiore D all‟interno del veicolo per diminuire il camber vi sia un contemporaneo aumento dell‟angolo di sterzo.
Osservando la sospensione da dietro (Parte superiore della Figura 4-8 –
Variazione dell’angolo di sterzo in relazione alla variazione dell’angolo di camber dovuta allo spostamento dello snodo D si vede come la sospensione
ruoti attorno allo snodo inferiore (evidenziato dalla freccia azzurra). Poiché il braccetto di sterzo (in rosa nella figura) non è alla solita altezza di tale snodo questo comporta un azione di sterzo, evidenziata dalla freccia verde.
ANALISI DELLA GEOMETRIA
La distanza in verticale del braccetto di sterzo è direttamente proporzionale all‟effetto di sterzo.
Si è quindi modificata la sospensione portando il braccetto di sterzo alla solita altezza dello snodo inferiore ottenendo il comportamento in Figura 4-9. Si nota come non ci sia alcun effetto sullo sterzo. Questi dati sono validi per la sospensione ad escursione nulla, o meglio, in equilibrio al carico di progetto mentre il comportamento in compressione o estensione potrebbe variare sensibilmente.
Figura 4-8 – Variazione dell’angolo di sterzo in relazione alla
variazione dell’angolo di camber dovuta allo spostamento dello snodo D Si è quindi estesa l‟analisi ai due casi estremi. Di seguito si riportano i grafici dell‟effetto dello spostamento dell‟attuatore con sospensione totalmente compressa e totalmente estesa.
-6 -4 -2 0 2 4 6 -40 -30 -20 -10 0 10 20 30 40 Var izi o n e an go li [° ] Spostamento [mm] Camber Sterzo Caster
ANALISI DELLA GEOMETRIA
Figura 4-9 – Variazione degli angoli della ruota in relazione allo
spostamento dello snodo D nel caso di scuotimento nullo
Questa modifica non comporta variazioni di carico sostanziali sullo snodo D come è possibile vedere inFigura 4-12.
Figura 4-10 – Variazione degli angoli della ruota in relazione allo
spostamento dello snodo D nel caso di compressione totale
Figura 4-11 – Variazione degli angoli della ruota in relazione allo
spostamento dello snodo D nel caso di estensione totale -6 -4 -2 0 2 4 6 -40 -30 -20 -10 0 10 20 30 40 Var izi o n e an go li [° ] Spostamento [mm] Camber Sterzo Caster -6 -4 -2 0 2 4 6 -40 -30 -20 -10 0 10 20 30 40 Var izi o n e an go li [° ] Spostamento [mm] Camber Sterzo Caster
ANALISI DELLA GEOMETRIA
Osservando i grafici precedenti si può notare come rimanga valida la linearizzazione degli effetti introdotta nel paragrafo 4.2: nelle zone dove agirà l‟attuatore, ovvero spostamento e camber negativo in compressione e e spostemento e camber positivo in estensione il rapporto rimane pressochè lineare.
Figura 4-12 – Sforzi sullo snodo D con veicolo in rettilineo in funzione
dello scuotimento della sospensione con braccetto di sterzo abbassato all’altezza del triangolo inferiore
Ovviamente sono stati anche considerati gli effetti di tale modifica sul comportamento della sospensione sottoposta alla normale escursione. Tali dati assumono particolare importanza considerando l‟intenzione di rendere l‟attuazione fail-safe.
È infatti piuttosto semplice rendere il cinematismo irreversibile, utilizzando ad esempio un attuatore elettrico a vite trapezoidale con adeguata inclinazione dei filetti ma resta da considerare il comportamento della sospensione con lo snodo D bloccato in una posizione fissa.
Osservando la Fig. 4-13 si vede il comportamento della sospensione con braccetto abbassato in caso di attuatore bloccato nella posizione originaria: il comportamento è lievemente diverso rispetto alla sospensione iniziale in
-200 0 200 400 600 800 1000 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z
ANALISI DELLA GEOMETRIA
compressione della sospensione. Volendo ottenere un comportamento più simile la si può agire spostando lo snodo che unisce il braccetto di sterzo alla cremagliera.
Figura 4-13 – Variazione degli angoli della ruota in relazione allo
scuotimento della sospensione nel caso di snodo D bloccato nella posizione di progetto e braccetto di sterzo abbassato all’altezza del triangolo
inferiore
Le figure seguenti mostrano il comportamento della sospensione con l‟attuatore bloccato in posizione di massima estensione e compressione con lo snodo che unisce il braccetto di sterzo alla cremagliera di 20 mm verso l‟interno del veicolo.
-6 -4 -2 0 2 4 6 -100 -50 0 50 100 Var izi o n e an go li [° ] Spostamento [mm] Camber Sterzo Caster
ANALISI DELLA GEOMETRIA
Figura 4-14 – Variazione degli angoli della ruota in relazione allo
scuotimento della sospensione nel caso di snodo D bloccato nella posizione di massima estensione dell’attuatore e braccetto di sterzo abbassato
all’altezza del triangolo inferiore
Figura 4-15 – Variazione degli angoli della ruota in relazione allo
scuotimento della sospensione nel caso di snodo D bloccato nella posizione di massima compressione dell’attuatore e braccetto di sterzo abbassato
all’altezza del triangolo inferiore -6 -4 -2 0 2 4 6 -100 -50 0 50 100 Var izi o n e an go li [° ] Spostamento [mm] Camber Sterzo Caster -6 -4 -2 0 2 4 6 -100 -50 0 50 100 Var izi o n e an go li [° ] Spostamento [mm] Camber Sterzo Caster
ANALISI DELLA GEOMETRIA
Osservando le figure precedenti si nota come gli angoli della ruota mantengano lo stesso andamento relativo allo scuotimento della sospensione nonostante lo spostamento dell‟attuatore.
Si può così ritenere dimostrato mostrano come sia possibile con una semplice modifica andare a incidere maggiormente sul camber rispetto all‟angolo di sterzo mantenendo intatti le altre caratteristiche.
4.4. Soluzione 2: controllo angoli caratteristici con
sterzo proporzionale al camber tramite
avanzamento del braccetto di sterzo
Un'altra soluzione che permette di cambiare il rapporto tra gli angoli è quella di spostare in avanti, ovvero dall‟altra parte della ruota il braccetto di sterzo. In questo modo come è possibile vedere dalla figura Figura 4-16 ad un decremento di camber per via dell‟attuatore corrisponde un aumento di sterzo.
Figura 4-16 – Variazione degli angoli di caster camber e convergenza
al variare della lunghezza del braccetto DF con braccetto di sterzo spostato davanti al mozzo della ruota
-8 -6 -4 -2 0 2 4 6 8 10 -60 -40 -20 0 20 40 60 Var iazi o n e An go li [° ] Spostamento [mm] Camber Caster Sterzo
ANALISI DELLA GEOMETRIA
Questo tipo di comportamento può portare un vantaggio sostanziale ovvero l‟ottimizzazione della deriva: si può sfruttare l‟effetto sullo sterzo dell‟attuatore impostandolo per ottenere la stessa deriva su entrambe le ruote anteriori. Questo non permetterebbe di ottenere contemporaneamente un angolo ottimale di camber ma consentirebbe comunque di avere entrambe le ruote anteriori inclinate verso il centro della curva.
Anche in questo caso non sussistono significative variazioni di carico sullo snodo D come è possibile vedere dalla figura seguente.
Figura 4-17 – Sforzi sullo snodo D con veicolo in rettilineo in funzione
dello scuotimento della sospensione con braccetto di sterzo spostato anteriormente
Anche per questa soluzione valgono le considerazioni sviluppate in precedenza per la soluzione numero 1: variando la posizione dello snodo che unisce il braccetto di sterzo alla cremagliera è possibile variare con semplicità il comportamento dell‟angolo di sterzo rispetto allo scuotimento della sospensione per ottenere lo stesso comportamento della sospensione originaria.
Ad esempio abbassando il braccetto di sterzo di 20 mm si ottenie facilmente la seguente curva:
-200 0 200 400 600 800 1000 -100 -50 0 50 100 Fo rza [N ] Spostamento [mm] X Y Z
ANALISI DELLA GEOMETRIA
Figura 4-18 – Angoli della ruota in funzione dello spostamento
dell’attuatore con braccetto di sterzo avanzato rispetto al mozzo e abbassato di 20 mm.
Risulta inoltre possibile variare il rapporto del guadagno di camber e sterzo al variare dello spostamento dell‟azionamento: quest‟ultimo aumenterà tanto più lo snodo unente il mozzo della ruota e il braccetto di sterzo avrà ascissa e ordinata simili allo snodo unente triangolo inferiore e mozzo.
Di seguito i valori dei coefficienti che saranno utilizzati nelle successive prove: (1.1) (1.2) -32,3 (1.3) -6 -4 -2 0 2 4 6 -40 -30 -20 -10 0 10 20 30 40 Var izi o n e an go li [° ] Spostamento [mm] Camber Sterzo Caster
ANALISI DELLA GEOMETRIA
4.5. Soluzione 3: scatola di sterzo con rapporto
variabile elettronicamente.
Un'altra soluzione, qualora si voglia ottenere il controllo totale e indipendente degli angoli è quella di adottare una scatola di sterzo con rapporto variabile elettronicamente. Nello specifico si potrebbe adottare un attuatore elettronico al posto del braccetto di sterzo.
Questa soluzione, per quanto promettente dal punto di vista cinematico, comporterebbe però l‟esclusione del collegamento meccanico tra volante e ruota, con i conseguenti problemi di caratteristica fail-safe (superabili nel breve-medio periodo con le recenti innovazioni tecnologiche) e di accettazione da parte dell‟acquirente finale. Anche se il “drive by wire” è un metodologia utilizzata con successo da più di vent‟anni buona parte dei consumatori continua a non accettarla positivamente: sintomatica è la presenza in commercio di accessori “after-market” per sostituire sitemi by-wire (ad esempio il controllo elettronico dell‟acceleratore) con tradizionali sistemi puramente meccanici [17].
4.6. Scelta della soluzione finale
Per i precedenti motivi si è quindi deciso di sperimentare il secondo sistema ovvero quello di spostare anteriormente il braccetto di sterzo e decidere il rapporto tra il guadagno di camber e quello di sterzo dovuto allo spostamento dell‟attuatore. Le ragioni che hanno portato a questa scelta sono evidenziate in nella tabella seguente.
Bisogna comunque notare che ai fini dello scopo principale della presente tesi, ovvero lo studio della fattibilità di una sospensione a cinematica controllata, non vi sia molta differenza tra le prime due soluzioni in quanto la posizione del braccetto di sterzo non influenza sostanzialmente le specifiche dell‟attuatore da utilizzare, ne la forma di massima del azionamento.
La seconda soluzione, comunque, permette di ottimizzare l‟angolo di deriva, dalla grande importanza per lo sviluppo della forza laterale
ANALISI DELLA GEOMETRIA
camber ottenendo, di fatto, vantaggi simili a quelli di un completo sistema di sterzo “by wire” mantendo però il collegamento meccanico tra sterzo e ruote.
Tab 4.3 Tipo di soluzione Vantaggi Svantaggi Abbassamento braccetto di sterzo Ottimizzazione Camber Deriva non ottimale Avanzamento Braccetto di sterzo Ottimizzazione Deriva, miglioramento Camber Camber non ottimale Scatola di sterzo a rapporto variabile elettronicamente Ottimizzazione Deriva e Camber Costo Tecnologia non ancora completamente disponibile .
5. PROVE
Al fine di valutare le caratteristiche del veicolo prima e dopo l‟adozione del meccanismo sono state messe a punto una serie di prove effettuate sul modello di veicolo in Matlab®. In particolare si sono scelte simulazioni che dessero indicazioni precise sui parametri stabiliti come obiettivi ovvero un aumento della tenuta laterale e un miglioramento della risposta in situazioni dinamiche.
5.1. Curva a velocità costante
Per misurare le tenuta laterale attuale del veicolo in condizioni stazionarie e per poter valutare i miglioramenti introdotti con l‟adozione del meccanismo si è scelto di utilizzare una prova con curve effettuate a velocità costante e angolo volante lentamente crescente col tempo.
In particolare si è scelto un aumento dell‟angolo volante di 2 gradi al secondo e si sono effettuate prove alle velocità di 20, 30 e 40 m/s.
Nello svolgimento della prova il veicolo viene quindi fatto accelerare sino alla velocità impostata in marcia rettilinea per poi effettuare la manovra di sterzo mantenendo tale velocità.
In Fig. 5.1 si può vedere il grafico dell‟andamento dell‟angolo di sterzo del volante. Il valore dell‟angolo di sterzo dopo i venti secondi si può facilmente ricavare dal tempo di prova dalla formula: .
(5.1) ( )
Si nota che la manovra di sterzo inizia dopo 20 secondi dall‟inizio della simulazione, tempo ritenuto necessario per poter accelerare sino alla velocità desiderata.
Per valutare l‟esito di tale prova si sono considerati i valori dell‟accelerazione laterale a regime (Figura 5-4), delle forze laterali delle ruote (Figura 5-2) e degli angoli di deriva e di camber degli pneumatici
PROVE
(Figura 5-6 e Figura 5-7) oltre, ovviamente, alla traiettoria del veicolo (Figura 5-3) e all‟andamento della velocità (Figura 5-5).
5.1.1. Prova a 20 m/s
Analizzando i risultati si può vedere che veicolo perde aderenza dopo a circa 63 secondi dall‟inizio della prova un angolo volante quindi di 86 gradi con una accelerazione laterale a regime lievemente inferiore a 8 m/s2. Continuando a sterzare oltre a questo valore, come si vede in Figura 5-2, le ruote anteriori bruscamente riducono la forza laterale sviluppata e gli angoli di deriva delle ruote aumentano molto rapidamente. Osservando il grafico della velocità si vede come questa si riduca progressivamente dopo che le ruote esterne hanno assunto angoli di deriva superiori a circa 3,5 gradi. Questo indica quindi che il veicolo ha perso aderenza e le ruote stanno “slittando” lateralemente.
Figura 5-1 – Angolo di Sterzo del volante
-20 0 20 40 60 80 100 120 140 160 180 0 20 40 60 80 100 120 An go lo v o lan te [ °] Tempo di prova [s]