2 Generalità su materiali a memoria di forma
In questo capitolo verranno illustrate le caratteristiche delle varie tipologie di materiali a memoria di forma. Una guida orientativa sull’argomento è costituita dall’articolo [1]
2.1 Definizione
I materiali a memoria di forma, deformabili tramite una forza esterna (processo di programmazione), sono in grado in seguito ad adeguati stimoli esterni, generalmente una variazione della temperatura, di recuperare la forma originaria precedente la deformazione (processo di recupero).
Il processo di programmazione è costituito da più fasi successive: riscaldamento (o raffreddamento) del campione, deformazione e stabilizzazione della forma temporanea.
Il processo di recupero è costituito dal superamento di una temperatura di transizione Ttrans che induce l’effetto di memoria di forma.
Per i polimeri generalmente la Ttrans è la temperatura di transizione vetrosa o quella di fusione (Tm) della componente reversibile, come verrà spiegato più avanti nel testo.
In generale per poter ritornare alla forma temporanea è necessario ripetere la fase di programmazione, comportamento a senso unico (one-way), tranne che per alcune leghe metalliche sottoposte a condizioni particolari o ad alcuni gel che mostrano un comportamento reversibile (two-way).
Varie tipologie di materiali presentano questo comportamento: leghe metalliche, ceramiche e polimeri tra cui vanno menzionati i gel.
2.2 Leghe metalliche (SMA)
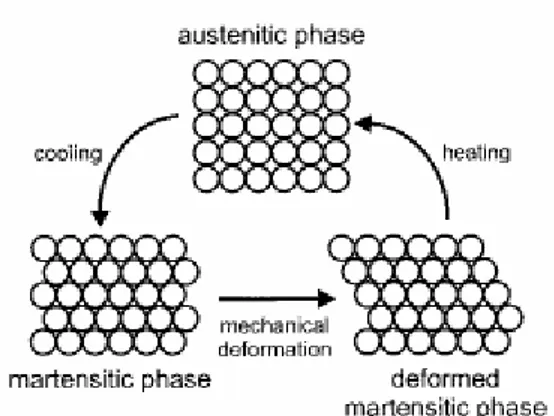
Gli leghe sono la prima tipologia di materiale per cui venne osservato l’effetto della memoria di forma. Storicamente l’effetto venne osservato per la prima volta da Chang e Read nel 1951 in una lega Oro-Cadmio. Nel 1963 Buehler ed altri descrissero il comportamento di una lega equiatomica di Nickel e Titanio (Nitinol). L’effetto è causato da una transizione dalla fase austenitica a quella martensitica in seguito a raffreddamento. Una volta avvenuta la transizione il materiale può essere deformato a seconda dello scopo. Per ritornare nella fase austenitica si deve riscaldare il materiale al di sopra della temperatura di transizione, come già accennato nel paragrafo Definizione.
Figura 2.1 Rappresentazione del meccanismo dell’effetto di memoria di forma per leghe metalliche basate sulla trasformazione di fase martensitica.
Gli leghe hanno la capacità di recuperare totalmente deformazioni fino all’ 8% per quelle one-way, per le quali è necessario la riprogrammazione dopo ogni recupero, e del 4% per quelle two-ways, per cui il passaggio tra le due fasi è reversibile agendo solo sulla temperatura, sebbene siano soggette a un numero limitato di cicli e alla presenza di una temperatura critica al di sopra della quale ritornano ad avere un comportamento one-way.
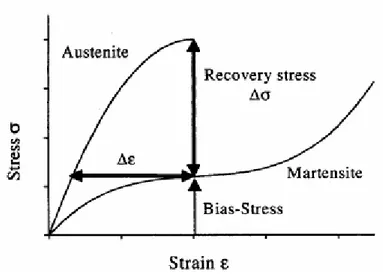
Le curve stress – strain della fase martensitica e di quella austenitica differiscono in modo significativo a causa della grande non linearità della martensite. Se uno
opportuno stress, bias stress, è applicato e il materiale viene sollecitato ad effettuare la transizione inversa si può ottenere un grande recupero dello stress o dello strain a seconda delle condizioni a contorno. [2]
Figura 2.2 Diagramma stress-strain delle fasi austenitica e martensitica di un SMA
Una caratteristica negativa è la sensibilità a variazioni stechiometriche della composizione e conseguente cambiamento delle proprietà del materiale. Ad esempio per il Nitinol un cambiamento del contenuto di Nickel dell’1% può spostare la temperatura di transizione di 100 K.
Figura 2.3 Distorsione del reticolo cristallino a) scorrimento; b) effetto di memoria di forma c) superelasticità
Come mostrato nella figura precedente sono possibili più comportamenti differenti. E’ possibile deformare il materiale irreversibilmente in seguito allo slittamento dei piani reticolari e alla rottura e formazione di nuovi legami. Se vi è un trattamento termico con raffreddamento al di sotto della temperatura a cui si è completata la trasformazione in fase martensitica (Mf) e un successivo riscaldamento al di sopra della temperatura in cui la fase è solo austenitica (Af) allora si manifesta l’effetto di memoria di forma. [22]
Come visibile nella seguente figura la trasformazione martensitica presenta un’isteresi definita da quattro temperature critiche, due delle quali appena descritte, le altre due, As ed Ms, sono quelle in cui la trasformazione di fase ha inizio.
Il Nitinol presenta un’altra caratteristica: la superelasticità. Essa consiste nella capacità di recuperare deformazioni al di là della regione elastica. Questo fenomeno è basato sul fatto che la fase martensitica non è stabile sopra una certa temperatura in assenza di una forza esterna. Sopra questa temperatura una deformazione esterna è spontaneamente recuperata. In questo stato è possibile immagazzinare energia che viene quasi totalmente restituita.
Le leghe data la loro grande varietà di composizione hanno tutte applicazioni tecniche: il Nitinol ad esempio è usato in ambiti medici vista la sua biocompatibilità, mentre altre leghe sono usate in altri campi per le loro caratteristiche termiche ed elettriche e per la loro miglior duttilità.
2.3 Ceramiche
[19]Anche le ceramiche mostrano un effetto di memoria di forma che è dovuto alle diverse proprietà delle varie tipologie di ceramiche.
2.3.1 Ceramiche visco-elastiche
Alcune ceramiche vetrose di mica (KMg3AlSi3O10F2) hanno la capacità di manifestare un effetto di memoria di forma con recuperi fino allo 0.5%.
Questi materiali hanno una frazione di volume compresa tra il 40% e il 60% di fase cristallina dispersa in una fase vetrosa. Diversamente dalle leghe il fenomeno di memoria di forma deriva dall’introduzione di energia elastica nella matrice rigida. Al di sopra dei 573 K la mica può essere plasticamente deformata tramite uno scorrimento basale e la deformazione plastica della parte cristallina è immagazzinata elasticamente da quella vetrosa circostante. Quando il materiale è riscaldato si ha il ritorno alla forma originaria.
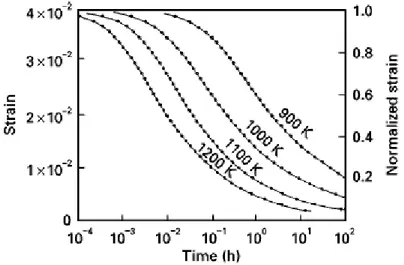
In figura 2.5 si può vedere il comportamento di questa tipologia di ceramiche a varie temperature.
Figura 2.5. Recupero della deformazione di torsione in funzione del tempo e della temperatura per ceramiche di mica
Essendo i materiali viscolelastici stimolati termicamente la percentuale di recupero mostra una forte dipendenza dalle condizioni operative di deformazione e recupero.
2.3.2 Ceramiche martensitiche
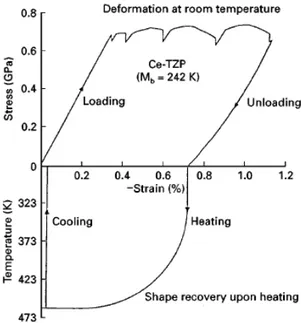
Alcune tipologie di materiali ceramici (ZnO2) possono andare incontro alla trasformazione martensitica, in quanto si passa da una struttura tetragonale a una monoclina, se sottoposte a un opportuno trattamento termico o ad adeguati stress. Il ritorno alla fase tetragonale è sempre reso possibile da una variazione di temperatura.
E’ possibile recuperare deformazioni del 2%, tuttavia microfratture in prossimità dei grani possono portare a una degradazione del recupero e danneggiamenti.
Figura 2.6. Curve stress-strain di ZnO2-12%mol CeO2 e recupero temperatura-strain
2.3.3 Ceramiche ferroelettriche
Negli ossidi tipo pervoskite i domini cristallini possono esistere in una grande varietà di stati e possono essere paraelettrici, ferroelettrici o antiferroelettrici a seconda della composizione e da condizioni esterne come temperatura, stress e campo elettrico. Alcuni esempi sono dati da: (Pb, La) (Zr, Ti)O3,(Sr, Ba) Nb2O6 e Mnx(Zn, Cd)1-xMn2O4.
La transizione di fase tra queste differenti strutture come quella paraelettrica-ferroelettrica (PE-FE) e quella antiparaelettrica-ferroelettrica-paraelettrica-ferroelettrica (AFE-FE) può essere accompagnata da una considerevole deformazione delle ceramiche. La transizione AFE-FE può essere indotta dall’applicazione di grandi campi elettrici. La deformazione causata sia dalla riorientazione dei domini polarizzati, sia dalla transizione di fase indotta dallo stesso campo elettrico, è più grande di quella ottenuta con i materiali piezoelettrici convenzionali, raggiungendo valori di 0.6%. Quando il campo è tolto le elettroceramiche convenzionali ritornano al loro stato originario, mentre altre sono metastabili in entrambi gli stati, quindi per tornare indietro si può sia invertire la polarità del campo applicato, sia riscaldare il materiale.
Nonostante la deformazione ottenibile sia minore delle leghe, le ceramiche hanno tempi di risposta dell’ordine dei microsecondi in quanto il campo può essere cambiato molto più velocemente della temperatura.
Figura 2.7. Confronto della deformazione longitudinale per materiali FE e AFE: (a) deformazione spontanea a causa della polarizzazione in un materiale FE;
(b) trasformazione AFE-FE indotta da un campo
Lo stesso comportamento lo manifestano le ceramiche ferromagnetiche, tuttavia essendo la loro temperatura di Neel bassa la magnetizzazione spontanea è ottenibile sono a basse temperature.
In generale si può dire che usando le ceramiche è possibile quindi sviluppare dispositivi che operino ad alte temperature cui le leghe non sono applicabili. Dall’altro lato, tuttavia l’impiego è limitato dalla piccola capacità recupero e dalla tendenza a manifestare microfratture.
2.4 Gel
I gel sono costituiti da catene reticolate e da un fluido che riempie gli spazi interstiziali. Sono una tipologia di materiale che presenta l’abilità di reagire alle condizioni esterne cambiando in modo considerevole il proprio volume gonfiandosi o restringendosi. In questo caso non soltanto la temperatura ma anche variazioni del pH, della forza ionica o il sovente possono produrre queste variazioni di volume. Essi sono quindi un sistema unico, in quanto sono in grado di effettuare
una conversione tra energia chimica e lavoro meccanico ionizzando reversibilmente determinati gruppi chimici, in modo da produrre ad esempio repulsione elettrostatica di ioni lungo la catena polimerica provocando l’espansione del materiale.
I gel durante questi cambiamenti possono variare il proprio volume di tre ordini di grandezza e sviluppare una potenza comparabile con quella dei muscoli umani. A questi pregi tuttavia si affianca anche la poca stabilità meccanica e chimica manifestatesi tramite fenomeni di isteresi.
Figura 2.8. Gel ionico in soluzione [3]
2.4.1 Contrazione elettrica [23]
Molti gel hanno cariche all’interno della struttura e ciò fa si che possano assorbire significative quantità d’acqua, fino a 2000 volte il peso del polimero, senza però dissolversi in essa.
Quando un campo elettrico è applicato lungo il gel, ioni differenti subiscono forze in direzioni opposte, tuttavia mentre i macroioni sono ancorati alla struttura, i microioni possono migrare lungo il campo elettrico e agganciare molecole di acqua nel loro tragitto. Un modello è stato proposto da Gong ed altri (J. P. Gong, T. Nitta, y. Osada, J Phys Chem 1994, 98, 9583) e in accordo a questa analisi è
stato notato che l’efficienza della contrazione è inversamente proporzionale alla densità di carica presente nel gel e aumenta all’aumentare del grado di rigonfiamento. Inoltre la velocità di contrazione dipende solo dalla quantità di carica trasportata, quindi dalla corrente.
per
llo stesso modo una variazione di volume associata a una pressione esterna fa
ato anche al contrario attraverso molecole Figura 2.9 Gel di poly(2-acrylamido-2-methyl-1-propanesulfonic acid)
(PAMPS) prima e dopo l’applicazione di una differenza di potenziale di 15 V 10 ore.
A
variare il pH del gel in quanto quando viene compresso, il materiale tende a espandersi lateralmente portando ad una dilatazione della rete polimerica in questa direzione. Ciò comporta un aumento di energia libera della catena polimerica (diminuzione di entropia), che viene compensata attraverso un aumento del grado di ionizzazione.
Questo fenomeno può essere us
cariche che superficialmente si leghino al gel diminuendone l’energia elettrostatica e portandolo a contrarsi. In un sistema di questo tipo è possibile far muovere ad esempio una membrana usando un campo elettrico per guidare alternativamente le molecole esterne a legarsi al gel causando una contrazione anisotropa come mostrato nella seguente figura.
Figura 2.10 Meccanismo di movimento del gel PAMPS con un voltaggio di 10V
2.4.2 Effetto di memoria di forma [24,25,26]
Gli idrogel normalmente sono amorfi, senza particolari strutture ordinate.
E’ possibile tuttavia ottenere queste strutture attraverso la copolimerizzazione di monomeri idrofilici come l’acido acrilico (AA) con monomeri idrofobici che formano cristalli come lo stearil acrilato (SA) e l’acido acriloilhexadecanoico (AHA), ottenendo gel che subiscono transizione ordine-disordine se sottoposti a cambiamenti di temperatura, pH, solvente.
Nel sistema poli(AHA-co-AA) la transizione avviene facendo variare il pH in modo da neutralizzare le interazioni tra le catene laterali alchiliche che impediscono la ionizzazione dei gruppi carbossilici presenti. Aumentando il pH o sostituendo il solvente con etanolo si ha l’eliminazione della struttura a strati e continuando in questo senso si ottiene la scomparsa della cristallizzazione delle catene laterali completando la transizione verso il disordine.
Figura 2.11 Transizione ordine-disordine
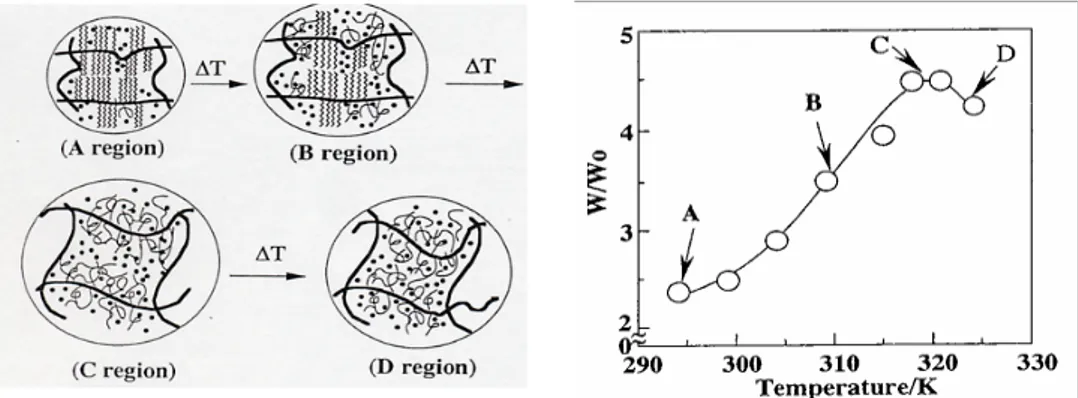
Un comportamento simile è mostrato dal poli(SA-co-AA) che presenta questo tipo di transizione al variare della temperatura. Al di sopra della temperatura di fusione dello stearil acrilato infatti le regioni di AA sono più facilmente penetrabili dal solvente ottenendo così la transizione sopra descritta. Aumentando la temperatura tuttavia il rigonfiamento diminuisce in quanto si ha un restringimento dovuto all’elasticità della catena principale così da ottenere nella curva descrivente l’andamento del rigonfiamento con la temperatura un massimo. Il rigonfiamento è definito come il peso del campione rigonfiato rispetto il peso del campione secco.
Figura 2.12 Rappresentazione schematica del rigonfiamento e suo andamento con la temperatura
Sfruttando questo fenomeno è possibile ottenere un effetto di memoria sui gel che presentano un’orientazione delle lamelle cristalline delle catene laterali.
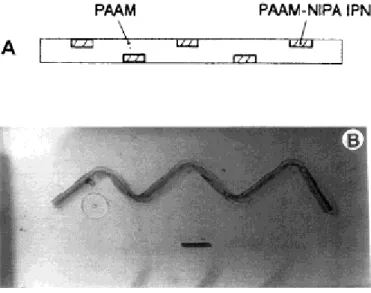
I due sistemi appena descritti presentano un effetto di memoria di forma di tipo one-way. Altri sistemi invece hanno un comportamento two-way. Un esempio è dato dai polimeri reticolati interpenetranti (IPN).
Questi sono costituiti da due parti di cui una sensibile a un determinato stimolo ambientale. Queste parti possono essere chiamate rispettivamente elemento di controllo e substrato. Un sistema di questo tipo, termicamente attivabile, è costituito da N-isopropilacrilammide (NIPA) che agisce da controllo e una rete interpenetrante di NIPA/PAAM dove quest’ultimo è un poliacrilammide che agisce da substrato. In seguito ad un aumento di temperatura ad esempio si può avere un restringimento dello strato di controllo mentre il substrato non va incontro a variazioni di volume apprezzabili. Un esempio pratico è riportato nella seguente figura.
2.5 Polimeri (SMP)
2.5.1 Generalità
I polimeri costituiscono una classe di materiali su cui negli ultimi anni si è concentrata l’attenzione nella ricerca per cercare di comprendere e sviluppare l’effetto della memoria di forma per una serie di motivi di carattere pratico. Questi, infatti, sono dal punto di vista economico poco costosi, mentre da quello pratico sono facilmente lavorabili, è possibile cambiare agevolmente la Ttrans agendo sulla struttura e la morfologia del polimero così da trovare campi di applicabilità vasti e le deformazioni recuperabili sono dell’ordine del 300%, e inoltre, hanno una ottima resistenza ad agenti chimici, all’esposizione alla luce solare e una elevata biocompatibilità.
I polimeri rispetto alle leghe metalliche sono caratterizzati da quella che è definita fase amorfa. In questa fase le catene polimeriche hanno una distribuzione casuale in quanto è quella che presenta il maggior numero di conformazioni e conseguentemente la maggior entropia secondo l’equazione di Boltzmann:
(2.1)
W k S = ln
dove k è la costante di Boltzmann, W la probabilità di avere una certa conformazione, ed S è l’entropia.
Al di sopra della temperatura di transizione vetrosa, Tg, le catene vengono termicamente attivate e ciò rende possibile la rotazione intorno ai legami ottenendo nuove conformazioni ed anche la traslazione delle catene stesse.
Inoltre i polimeri manifestano una netta variazione del modulo elastico intorno la temperatura di transizione vetrosa. Al di sopra della Tg il materiale è morbido mentre scendendo diventa rapidamente rigido.[4]
Figura 2.14. Andamento generale del modulo elastico nei polimeri
2.5.2 Effetto della memoria di forma
L’effetto della memoria di forma nei polimeri non è, a differenza delle leghe, causato da una transizione di fase di tipo martensitico, ma dalla variazione di entropia conformazionale delle catene polimeriche sottoposte a uno stress esterno.
Se, infatti, al di sopra della Tg viene applicata una forza esterna le catene tenderanno a orientarsi nella direzione della forza. Se l’applicazione di questa forza perdura per un breve lasso di tempo, così che gli entanglements delle catene non vengano modificati, il campione recupera elasticamente la sua forma originaria in quanto tende a riformare la conformazione non lineare delle sue catene massimizzando così l’entropia.
Se invece l’applicazione è mantenuta per un tempo più lungo allora si ha un processo di rilassamento che risulta in una deformazione irreversibile.
Un comportamento differente si ha invece quando si è in presenza di punti di reticolazione tra le catene che ne impediscono lo scivolamento.
La reticolazione può essere sia di natura chimica che fisica. I polimeri chimicamente reticolati formano materiali insolubili che rigonfiano in alcuni solventi
e la cui forma non può essere cambiata una volta che il processo di reticolazione è terminato.
Gli elastomeri termoplastici, invece, sono reticolati fisicamente. Sono inoltre solubili e processabili dal fuso.
Il requisito per ottenere punti di reticolazione è quello di avere una separazione di fase all’interno del materiale con domini flessibili che costituiscono la fase reversibile e domini rigidi che formano quella fissa. La quantità e dimensione dei domini influiscono sul comportamento meccanico e termico, quindi sull’efficacia dell’effetto di memoria di forma [5-9, 17, 18].
La temperatura di transizione Tperm, cioè la temperatura più alta consentita è collegata alla fase formata dai domini rigidi: se non è superata questi fungono da punti reticolari stabilizzando la forma permanente, altrimenti il polimero fonde. Dopo aver riscaldato e deformato il materiale al di sopra della Ttrans, raffreddando si dà inizio alla cristallizzazione dei domini reversibili e questo ha due effetti: prevenzione del recupero della forma e accumulazione di stress macroscopico in stress interno. Questo fa si che una volta riscaldato il materiale, la liberazione di questo stress facilita il riposizionamento delle catene nella loro conformazione iniziale.
Figura 2.15 Rappresentazione schematica dell’effetto di memoria di forma per: a)copolimero a blocchi con Ttrans=Tm;
b) polimero covalentemente reticolato con Ttrans=Tm; c) rete polimerica con Ttrans=Tg
2.5.3 Caratterizzazione termomeccanica
Il comportamento degli SMP è, dal punto di vista pratico, analizzato tramite test ciclici termomeccanici. [5,6,10,11]
Generalmente le misure vengono effettuate tramite tester che operano in elongazione sul materiale, ma si può allo stesso modo operare in compressione. Il singolo ciclo consiste nella programmazione e recupero della forma.
Per prima cosa il campione viene riscaldato ad una temperatura Th al di sopra della Ttrans ed è allungato fino alla massima deformazione εm (1). E’ importante nei termoplastici non superare la Tperm cosa che comporterebbe la fusione del polimero.
Successivamente si raffredda al di sotto di Ttrans mantenendo costante la deformazione εm (2). Viene tolto lo stress applicato al campione (3) e si riscalda questo al di sopra della Ttrans per attivare il processo di ritorno di forma (4). Si inizia il ciclo successivo (5).
Il processo così decritto è spesso rappresentato in curve ε-σ come in Figura 2.16a.
Figura 2.16. Rappresentazione schematica degli studi termomeccanici. εm è la deformazione massima applicata; εu è quella dopo che il materiale è raffreddato e senza stress; εp è la deformazione residua. Le fasi 1-5 del test sono descritte nel testo
Differenti effetti possono cambiare l’andamento della curva soprattutto quando si effettua il raffreddamento, in particolare le variazioni del coefficiente di espansione termica al di sopra e al di sotto della Ttrans e del volume in seguito a cristallizzazioni nel caso che la Ttrans coincida con la Tm.
Una importante variabile che non può non essere tenuta in considerazione e che non è messa in evidenza da misure bidimensionali come quella in figura 1.16a è la Ttrans, per questo spesso viene usato una tipologia di diagramma tridimensionale ε-T-σ, come in Figura 2.16b.
Le grandezze più importanti da determinare in questi test sono la percentuale di deformazione recuperata Rr e quella di stabilità della deformazione Rf.
La prima è legata alla capacità del materiale di memorizzare la forma permanente ed è indice di quanto la deformazione applicata durante un ciclo è recuperata nella successiva transizione di memoria di forma:
)
1
(
)
(
)
(
−
−
−
=
N
N
N
R
p m p m rε
ε
ε
ε
(2.2)dove εp rappresenta la deformazione residua prima che venga applicato nuovamente uno stress esterno.
La percentuale di recupero totale della deformazione è definita come la deformazione recuperata dopo N cicli rispetto alla forma originale del campione:
m p m tot r
N
N
R
ε
ε
ε
(
)
)
(
,−
=
(2.3)La stabilità della deformazione descrive l’abilità dei segmenti reversibili di mantenere la deformazione meccanica che è stata applicata durante il processo:
m u f
N
N
R
ε
ε
(
)
)
(
=
(2.4)dove εu è la deformazione residua dopo il rilascio del carico. Un’altra grandezza importante dal punto di vista applicativo è la temperatura di recupero Tr definita come la temperatura in cui metà della deformazione è recuperata.
Figura 2.17. Curva generale del recupero termico
Come in parte evidenziato in Figura 2.16 e meglio in Figura 2.18 oltre che descritto negli articoli sopra citati i primi cicli differiscono tra di loro per poi raggiungere un comportamento stabile e riproducibile.
Le cause di questo comportamento sono attribuite alla storia del campione, e alla riorganizzazione che il polimero effettua quando sottoposto a una deformazione in una data direzione.
Ciò è dovuto alla resistenza che il materiale oppone alla deformazione a causa della cristallizzazione dovuta all’allineamento delle catene polimeriche in seguito alle precedenti trazioni, e per lo stesso motivo, l’aumento della cristallinità, si ha anche un innalzamento della temperatura di recupero della deformazione.
2.5.4 Influenza delle cariche nelle caratteristiche termiche, meccaniche ed elettriche
Negli ultimi anni parte della ricerca sui polimeri a memoria di forma si è concentrata sulla possibilità di migliorare le caratteristiche meccaniche e la risposta di questi materiali creando compositi con cariche di varia natura e spesso di dimensioni nanometriche.
Le cariche come le fibre di vetro [14] o ceramiche di SiC [16], migliorano le caratteristiche meccaniche, mentre altre tipologie possono essere sfruttate per attivare il recupero della deformazione.
Quest’ultimo caso è quello tipico del carbonio sia come nerofumo che come nanotubi, in quanto permette di riscaldare il campione tramite assorbimento di radiazione IR o per effetto Joule qualora il suo tenore raggiunga la soglia di percolazione [12, 13, 15].
In generale si ha come effetto quello di aumentare il modulo elastico in quanto si inserisce un materiale più rigido del polimero.
Si rimanda al capitolo 3 per una più dettagliata descrizione dell’influenza delle cariche sul comportamento elettrico e meccanico dei polimeri a memoria di forma.


![Figura 2.8. Gel ionico in soluzione [3]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7243296.79803/9.892.330.642.408.684/figura-gel-ionico-soluzione.webp)