Chapter 5
Ballistic walk
In this chapter, it will be analyzed the model of the Ballistic walk and some tests will be done on this model to make out the influence of the penalty parameters on the walker stability.
5.1. Definition
Observation of adult human walking suggests that coordination of this task is seemingly simple. After all, walking “appears” quite graceful. Nevertheless, how individual muscle fulfil the mechanical requirements of the locomotor task remains controversial even though studies of gait have long history.[12,13]. Analyses of measurements obtained from individuals while walking are now quite common. Limited degrees-of-freedom dynamic walking models are especially powerful in understanding how dynamic interactions among the legs, and the segments within a leg, can exploit the inherent dynamical properties of the multi-linked system to generate efficient locomotion. In the [14,15] it is showed that body progression during swing, and thus single-leg support, can be accomplished in the absence of any muscle force generation for a reasonable set of kinematic conditions at toe-off because of the potential and kinetic energy exchanges between the swing-leg and the trunk and between the trunk and the stance-leg[16]. Other studies with conceptually-similar planar anthropomorphic walking models, with or without knees, have shown that periodic stable walking can be achieved without any muscular action whatsoever when descending down a gentle incline because gravity compensates for the kinetic energy lost during “hell strike”, and during knee hypertension near the end of swing if the model has knees[17,18]. Thus, the dynamics of this simple walking model allows for a periodic walking cycle down a slight incline to be established without any external energy input except for gravity. This is the idea of the ballistic walk or generally of the passive walking model. Then using the simplest passive walking model[19] and other more anthropomorphic passive walking models with active torque actuators to allow walking on level
immediately before to-off, is particularly effective because energy loss at “heel strike” of the leg is minimize. Similarly, in [21], it is showed that stable ballistic walking on flat ground can be achieved with simple phasic muscle contractions controlling hip torque and leg extension. These considerations has been taken from[11] in order to give interesting information about the ballistic walk, the models used to represents the ballistic walk, and their realization. In the next paragraph the model used to represent the ballistic walk will be explained and then the influence of the impact parameters on the stability of the model will be proved.
5.2. The model used
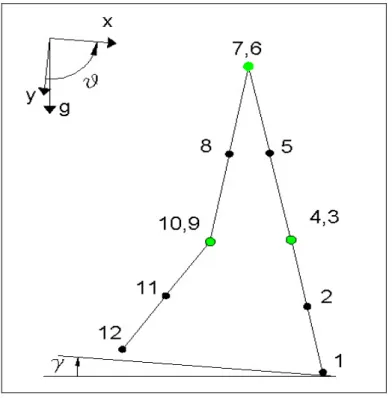
The model used to investigate about the influence of the impact parameters on the stability of the gait is showed in the picture 5.1.
Fig. 5-1: Ballistic walk model
In the picture, it is possible to identify every node of the model, and so the elements, and also the hinges (green circle). The angle g represents the slope of the ground. The reference system is the same of that one defined in the previous chapter. The model presents two hinges to represent the knee, thus in this case the prostheses
has not been considered. The initial position is programmed to have both of the feet of the model in contact with the ground. A initial rotation velocity is also given to the model, and in particular on the node 7. The penalty constraints are programmed like explained in the previous chapter, on both of the shins of the model. So there will be the hypertension of the leg, when these two equations will be violated:
2 4 8 11 0 0 θ − θ = ⎧ ⎨θ − θ = ⎩ (5.1)
The penalty constraint’s value is: Kt = 1000 N/m and Ct = 1000 Nsec/m. And the
hinge’s friction coefficient is equal to zero.
In the picture 5.2 it is showed the steps of the walk of this model with a ballistic kind during the animation.
Fig.5.2: Animation of the ballistic walk
According to the ballistic walk properties, no energy will thus be supplied to the model. On this graphic the fall of the body can also be seen: the legs are not in stance when they touch the ground. However the program will then have not a natural kind of evolving. As no action is considered, the bent-bearing leg should keep on bending, and the knee would then hit the ground. But the program blocks the rotation thigh-shin of the bearing leg, and the iterations go on with the half-bent leg. This explains the few steps with a bent leg bearing the whole body. So far none of the simulation of a ballistic walk did run on more than one step for each initial
position. It seems that the shin catch up the thigh sooner than what could allow the hypothesis of the ballistic walk. The leg is actually in stance before it passed the leg that bears the body. This means that the taut leg will hit the ground behind the bearing leg. Consequently the simulation does not show a walk but the fall of the body. Even when the walk is facilitate by imposing an initial speed, the body falls after only two steps. There is no clear statement, or any article, in which the ballistic walk is described as possible. It is known that Physics can prove this hypothesis. Anyway the walk is instable. Looking at the following picture, it is possible to understand how the model becomes instable.
Fig.5.3: Evolution of the pelvis
This graph shows the variation of the speed of the pelvis. In a first approximation, the pelvis will be considered as the location of the centre of mass of the upper body. The velocity of the pelvis is not linear: it seems like a succession of a portion of parabola and it decreases in correspondence of every step of the walker. This because of the impact of the foot on the ground that causes a lost of energy on the model. At last it seems clear to define the number of steps after which the walker falls: in this case two steps are enough, then it falls.
5.3. Definition of the impact problem of the knee
Some investigation about the reasons of this unstable walk has been done. It is possible to resume these reasons as follows:
• The initial condition
• The impact of the foot on the ground
• The impact of the shin against the knee
The questions about the initial condition and the foot impact on the ground, have been studied in the previous research[22], through the analysis of a simplest model (a model without the knee) according to the method explained in [7]. The impact of the shin against the knee has been analyzed only from a qualitative point of view, studying the way of activation and deactivation of the constraints during the simulation, to avoid the hypertension of the leg[23]. To show how the penalty parameters influence the model, some tests on it have been done, changing, in a random way, the value of the penalty constraints. The results are visible in the following pictures. Like in the previous paragraph, the evolution of the velocity of the pelvis has been chosen, given that it represents a good way to understand from when, the system becomes instable.
Fig.5.5: Evolution of the pelvis
From the analysis of the results, it seems clear how the value of the penalty parameters influence the stability of the walker gait. In fact in the second test the walker falls after six steps while in the third, after four steps and looking at the fig.5.3, it falls after two steps. The behaviour of the model is so influenced by these penalty coefficients.
Thus the problem of the impact of the shin against the knee is really important to obtain a stable walk. The current research will take an interest to solve this problem. In the next chapter, the way to solve it, will explained.