CAPITOLO 3
PROBLEMATICHE LEGATE AL MOVIMENTO DELLA GRIGLIA
3.1 Introduzione
In uno studio di fluidodinamica computazionale applicata ai motori, oltre alla complessità delle equazioni che governano il problema si pone anche il problema dovuto al fatto che il dominio di calcolo cambia continuamente in relazione al movimento del pistone e delle valvole.
In questo capitolo verranno illustrati i complessi problemi che sono stati affrontati per permettere il movimento della griglia in KIVA. Il codice di calcolo e gli algoritmi che governano il movimento della mesh, sono stati pensati dagli autori del software per geometrie abbastanza semplici mentre i motori ad accensione comandata che devono garantire la stratificazione della carica non lo sono. Infatti come visto nel capitolo 1 generalmente il pistone presenta un elevata complessità geometrica per la presenza della protrusione verticale e il profondo incavo necessario per raccogliere attorno alla candela la carica stratificata.
Anche in questo lavoro sono state analizzate geometrie di tale livello di complessità; è stato necessario un lungo e complesso lavoro per adattare il KIVA 3V alle geometrie in esame che ha portato allo sviluppo di un inedito algoritmo di “rezone”, che ha una validità del tutto generale e consente di trattare nell’ambito del KIVA geometrie di motori con arbitrario livello di complessità.
3.2 La tecnica degli snappers: le routines snapb, snapvtop e snapvfce
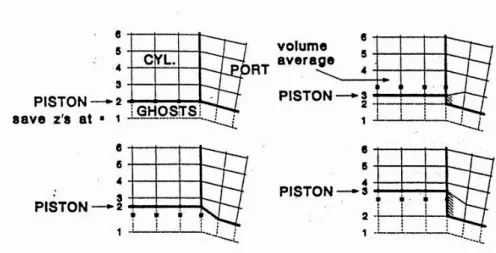
Nel Kiva 3v, per simulare il movimento della valvola e del pistone attraverso la griglia, viene utilizzata la cosiddetta tecnica degli snappers. La subroutine snapb funziona disattivando i piani ortogonali all’ asse del cilindro di celle, di cui è composta la griglia, quando il pistone si muove verso l’alto, attivandoli quando il pistone si muove verso il basso (fig. 3.2, 3.3). [19]
L’ultimo piano attivo della griglia viene a rappresentare la superficie superiore del pistone e si muove con la stessa velocità. Di conseguenza, periodicamente, il piano più prossimo alla
superficie di snapper attuale assumerà, a sua volta, il compito di rappresentare la superficie dello stantuffo. Se il pistone si muove verso il PMS, sarà il piano collocato una fila di celle sopra al piano di snapper; se il pistone si muove verso il PMI, sarà il piano collocato una fila di celle sotto al piano di snapper attuale, cosi come mostrato in figura 3.1.
Fig. 3.1 : Le figure mostrano i vari passi dello snappers le figure a destra mostrano anche il caso di snapper nell’intorno di una discontinuità nel cilindro, caso tipico del due tempi.
3.2.1 Le subroutines snapvtop e snapvfce
Analogamente alla routine snapb, le routines snapvtop e snapvfce si occupano di applicare la tecnica degli snapper per il movimento delle valvole. In questo caso le superfici di taglio sono rispettivamente la superficie superiore della valvola, compreso lo stelo, e la superficie inferiore del piattello valvola. Più precisamente le due routines mantengono costante lo spessore della valvola (che coincide anche con la distanza tra le due superfici di snapper), disattivando i piani, quando la valvola si sposta verso il basso, cioè incrementa la sua apertura e li riattiva, quando la valvola è in fase di chiusura (fig. 3.2-3.3). Il Timing degli snapper, come già specificato precedentemente, viene impostato tramite la tabella presente in setup.
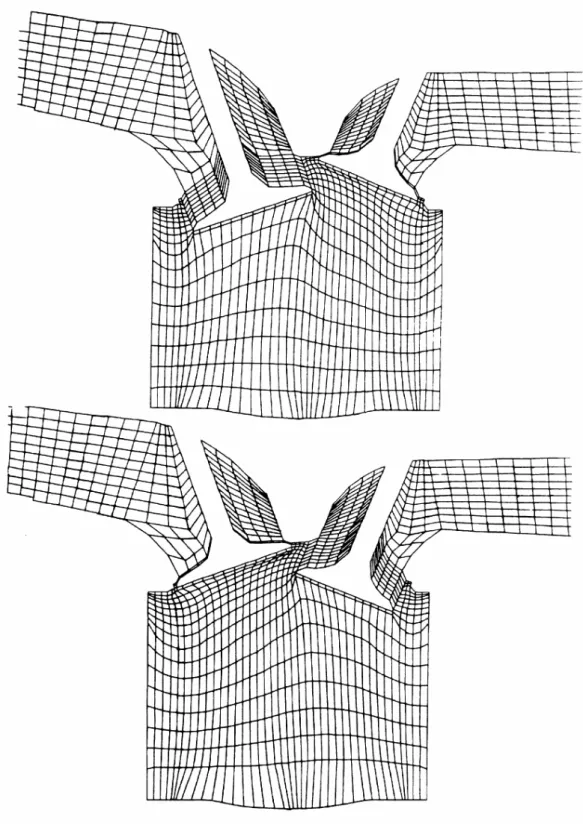
Fig. 3.2: tecnica degli snapper per il movimento della valvola e del pistone di un modello del manuale di KIVA 3V.
Fig. 3.3: griglia al punto morto superiore di un esempio del manuale del KIVA3V.
3.2.2 La chiusura della valvola.
Nel momento della chiusura della valvola, la griglia deve presentare almeno una fila di celle tra la superficie superiore della valvola e la sua sede (vedi fig.3.3) . Se alla valvola fosse permesso di andare a battuta nella propria sede, il volume dell’ultima fila di celle diverrebbe nullo e ciò comporterebbe una singolarità per le equazioni che governano il problema.
Per prevenire questa situazione, il KIVA permette di stabilire un’altezza minima per l’ultima fila di celle, al disotto della quale le condizioni al contorno delle celle, interposte tra valvola e sede, vengono cambiate da fluide a solide inibendo la presenza di flusso in tale zona, in accordo con quello che accade nella realtà. E’evidente che il valore di questa altezza debba essere imposto il più piccolo possibile compatibilmente con le esigenze di generazione della griglia, per i modelli realizzati in questo lavoro è stato imposto un valore molto basso ossia 0.05 mm contro gli 0.25 mm adottato dagli esempi mostrati nelle figure precedenti del manuale di KIVA.
3.3 Il Rezoning continuo
Le routine snapb e snapvfce hanno il compito, oltre che svolgere i relativi snapper, anche di richiamare le subroutine che realizzano il rezone della griglia. Il dominio di calcolo su cui integrare numericamente le equazioni cambia continuamente in relazione al movimento del pistone e delle valvole per cui è necessario aggiornare la posizione dei vertici che stanno all’interno del cilindro, il processo di aggiornamento della griglia prende il nome di rezone e può essere svolto mediante due tecniche diverse.
La tecnica del rezone manuale, che viene sfruttata ad esempio dal codice FIRE di AVL consiste nel creare, manualmente da parte dell’utente, più griglie dello stesso dominio in posizioni differenti; successivamente, il software ha il compito di interpolare geometricamente tali griglie (figura 3.4), permettendo la deformazione continua del dominio (moving mesh). In questo modo è possibile riorganizzare la spaziatura della griglia imponendo che venga mantenuta sempre una certa distanza tra i vertici adiacenti. Ciò deve esser fatto per evitare che, a seguito degli spostamenti di stantuffo e valvole, si creino localmente schiacciamenti, eccessive distorsioni o compenetrazioni delle celle.
Fig 3.4: griglie intermedie da realizzare con il codice FIRE
Nel caso del KIVA 3V, viene utilizzato un rezone automatico, che è in grado di simulare la deformazione del dominio, mediante la sola deformazione della griglia di partenza, senza interventi dell’utente ed in maniera del tutto automatica.
Tuttavia quest’ultima tecnica presenta alcuni importanti svantaggi rispetto al rezone manuale. Infatti, se da una parte permette di gestire il movimento in maniera del tutto automatica, dall’altra il rezone automatico necessita di un lungo lavoro di messa a punto per adattare gli algoritmi di rezonig alla geometria in studio.
E’ chiaro che una strategia del genere non è adattabile ad un programma di tipo commerciale, dove il codice sorgente non è disponibile, e comunque richiede lunghi tempi di messa a punto, spesso non compatibili con le esigenze industriali.
Inoltre la tecnica del moving mesh con rezone manuale permette di trattare qualsiasi tipo di geometria e problema, rendendola più appetibile per applicazioni commerciali.
Il problema del rezoning in KIVA è facilmente risolvibile in geometrie con valvole verticali (geometrie di motori diesel) o senza valvole (geometrie di motori due tempi) perché generando tramite il preprocessore una griglia perfettamente allineata in verticale è sufficiente che i piani della griglia vengano tagliati e aggiunti senza creare nessun problema di inversione di celle. Adottando invece geometrie con valvole inclinate tipiche dei motori quattro tempi ad accensione comandata non esiste una singola griglia che soddisfa il movimento di valvole e pistone per tutto il ciclo del motore.
Le routine presenti nel KIVA3V forniscono una base di partenza, perché illustrano i problemi di rezone che nascono durante il movimento della griglia e i possibili metodi per risolverli; gli algoritmi base sono stati pensati per lo studio delle seguenti tipologie di geometrie:
• Camera di combustione con valvole verticali (figura 3.5);
• Motore OHV (Over Head Camshaft) con camera di combustione a cuneo (subroutine
rezwedge) (figura 3.6);
• Motore DOHC (Double Over Head Camshaft) con camera di combustione a tetto, quasi simmetrica e quattro valvole
(routine rezpent) (figura 3.7);
• Motore DOHC con camera di combustione asimmetrica “cloverleaf” e quattro valvole (routine rezcomb) (figura 3.8).
Fig. 3.5: tipica camera di combustione di un motore A.S. Fig. 3.6: motore OHV.
Fig. 3.7: camera di combustione pentroof DOHC simmetrica.
Tutte le geometrie che verranno prese in esame in questo lavoro hanno quattro valvole inclinate e testata simmetrica quindi è stato preso come base di partenza la routine rezpent.
3.3.1 La routine rezpent
Nella prima parte della routine, il codice provvede ad assegnare dei particolari flag alle zone che, durante il movimento della valvola e del pistone, subiranno una deformazione e che come discusso nel capitolo precedente sono quelle relative alla famiglia squish. Questa inizializzazione è necessaria per permettere il corretto svolgimento del rezone automatico, il quale agirà ridistribuendo i nodi e le celle con leggi specifiche, a seconda della parte interessata (figura 7.8). Si può quindi comprendere fin da subito ciò che avevamo precedentemente sottolineato: la routine è in grado di funzionare correttamente solo se la geometria considerata non si discosta eccessivamente da quella del codice originale.
La variabile di flag nel KIVA è chiamata zsquish e può assumere valore intero variabile da uno a sette:
• zsquish = 0: Identifica le pareti del pistone e della testata.
• zsquish = 1: Identifica le celle all’interno del cilindro che saranno spazzate dal pistone ad esclusione delle pareti del cilindro;
• zsquish = 2: Identifica le pareti del cilindro;
• zsquish = 3: Identifica la zona tra le due valvole che viene modificata durante l’incrocio; • zsquish = 4: Identifica la prima fila di celle al disotto del piattello basso delle valvole; • zsquish = 5: Identifica la prima fila di celle che circondano le valvole sul lato sud e nord
nel caso di un’osservatore posto come il sistema principale di riferimento (figura 7.8); • zsquish = 6: Identifica la prima fila di celle che circondano le valvole sul lato est nel caso
di un’osservatore posto come il sistema principale di riferimento;
Fig. 3.9: le figure riportano i flag delle varie zone di squish cosi come sono convenzionalmente assegnate in KIVA 3V.
Terminata la fase di assegnazione, si passa alla parte della routine che costituisce il rezone vero è proprio. Per ogni zona identificata da un determinato Zsquish esiste un determinato algoritmo che provvede alla ridistribuzione delle celle in funzione del movimento della griglia tuttavia per spiegare brevemente il funzionamento si prende in esame la regione zsquish=1 che è anche quella che presenta i maggiori problemi durante il movimento.
Zsquish = 7 Zsquish = 3 Zsquish = 1 Zsquish = 0 Zsquish = 5 Zsquish = 6 Zsquish = 2
i6
i8
i7
do 110 i4 = i4min,i4max……… ……… ……… if(zsquish(i4).eq.1.0) then[
( ) ( ) ( ) ( ) ( ) )]
6 1 zkp km z jp z jm z ip z im z zn= ∗ + + + + + (3.1) *[
( ) ( ) 2 ( ( ) )) ( ) ( )]
8 1 kp x km x xjp im x jp x jm x xn= + + ∗ + + + (3.2) ……….. ……….. endif ……….. ……….. 110 continueL’aggiornamento della posizione dei vertici per la regione contrassegnata da Zsquish=1 viene effettuata sostanzialmente mediante le formule sopra riportate. Per ogni ciclo di calcolo vengono ricalcolate le posizione verticale e orizzontale di ogni vertice attivo (ciclo iterativo tra i vertici minimo e massimo del ciclo di calcolo corrente); la griglia infatti non si deve muovere lungo la direzione ortogonale al piano di simmetria perché la valvola e il pistone non hanno componenti di moto in tale direzione. Gli algoritmi in questione sono delle medie ponderate: la componente x (direzione orizzontale) del generico vertice viene calcolata come media della componente x di tutti i vertici che gli stanno attorno pesando maggiormente i nodi lungo x perché sono quelli che devono cambiare in relazione allo spostamento orizzontale della valvola; la componente z (direzione parallela all’asse del cilindro), viene calcolata come media algebrica della componente z di tutti i vertici intorno al generico vertice.
i3
i5
i4
kp ip jp imGeneralmente per adattare questi algoritmi ad una generica geometria si può tentare, inserendo dei coefficienti di fonte ai vari termini, di modificare la legge di distribuzione dei vertici; ad esempio per l’equazione che calcola la posizione verticale del generico nodo facendo pesare maggiormente la componente z(km) rispetto a z(kp) si ottiene la distribuzione in figura 3.11, mentre facendo pesare di più z(km) la distribuzione in figura 3.12.
Per quanto riguarda questo lavoro nei casi più complicati non è stato possibile limitarsi alle modifiche di prima ma è stato necessario mettere a punto un nuovo algoritmo di rezoning che permette di affrontare il problema del movimento della griglia di geometrie con arbitrario livello di complessità.
Fig. 3.12 : Distribuzione di celle ottenuta con peso a moltiplicare z(km) maggiore del peso di z(kp).
Fig. 3.11: Distribuzione di celle ottenuta con peso a moltiplicare z(kp) maggiore del peso di z(km).
3.4 Il nuovo algoritmo di rezoning sviluppato
Adottando le routine di rezoning originale di KIVA non è stato possibile, operando come descritto nel paragrafo precedente, risolvere il problema del movimento della griglia. Gli algoritmi infatti funzionano abbastanza bene quando si ha a che fare con geometrie aventi pistone con superficie piatta o con un incavo, ma quando vi è anche una protrusione, e quindi la superficie cambia inclinazione bruscamente, gli algoritmi cadono in difetto. Per poter capire per quale motivo gli algoritmi non funzionassero, e dato che non era disponibile un programma che permettesse di visualizzare la griglia, è stata creata ed implementata in KIVA una nuova
subroutine che produce dei file di uscita che costituiscono l’input per il programma ANSYS, che
permette la visualizzazione. La subroutine si chiama “visualizzagriglia”, ed è possibile consultarla per intero in appendice, richiamandola dal main program o dalla routine volume con la funzione call, è possibile visualizzare la griglia nei tre piani xz, xy, yz, e grazie alle funzioni di ANSYS effettuare ingrandimenti e selezioni che permettono di capire in quale punto della griglia si sono verificate delle inversioni di celle o eccessive distorsioni.
Fig. 3.13: immagine della griglia sul piano yz Fig. 3.14: immagine della griglia sul piano yz con gli algoritmi originali. con gli algoritmi implementati Le figure sopra riportate mostrano un immagine della griglia su un piano trasversale passante per la mezzeria con il pistone al PMS e permettono di capire perché gli algoritmi originali non funzionano (fig. 3.13): infatti a causa dell’inclinazione della protrusione del pistone che ricopia quella della testata, se la posizione del vertice generico viene calcolata con una media che tiene
pesi nella media delle equazioni (3.1) e (3.2), si risolve il problema al punto morto superiore ma mentre la valvola si apre ed il pistone scende, avendo diminuito la dipendenza soprattutto nella direzione x (longitudinale), si creano inevitabilmente delle inversioni.
Il nuovo algoritmo ideato risolve appunto questo problema (fig. 3.14), e nasce dall’esigenza di conciliare esigenze contrastanti. Quando il pistone è vicino al punto morto superiore è necessario infatti che la griglia rimanga perfettamente verticale e quindi la posizione x e z del generico nodo dipenda solo dalle componenti x e z del vertice che si trova sopra e da quello che si trova sotto rispetto alla direzione verticale.
[
( ) ( )]
2 1 kp z km z zn= ∗ + (3.3)[
( ) ( )]
2 1 kp x km x xn= ∗ + (3.4)Le equazioni (3.3) e (3.4), traducono matematicamente questo concetto. Quando siamo lontani dal punto morto superiore e la valvola è aperta è necessario invece che la griglia si adatti al movimento della valvola e rientrino in giuoco nell’algoritmo anche le dipendenze delle componenti dei vertici che si trovano vicini al generico nodo lungo l’asse x ed y. Infatti lontano dal PMS il numero di celle verticali per unità di lunghezza diminuisce e quindi non si manifestano più i problemi che si avevano vicino al PMS per cui è necessario, per risolvere i problemi legati alla deformazione della griglia da parte della valvola, avere una legge di ridistribuzione dei vertici come quella originale (3.5), (3.6):
[
( ) ( ) ( ) ( ) ( ) )]
6 1 zkp km z jp z jm z ip z im z zn= ∗ + + + + + (3.5) *[
( ) ( ) 2 ( ( ) )) ( ) ( )]
8 1 kp x km x xjp im x jp x jm x xn= + + ∗ + + + (3.6)Si pone adesso il problema di come ottenere un algoritmo che vicino al PMS sia simile alle (3.3), (3.4), mentre lontano sia simile alle (3.5), (3.6) e che vari con continuità durante tutto il tempo di simulazione. La soluzione che è stata adottata è stata di far variare le equazioni da quelle (3.3), (3.4) a quelle (3.5), (3.6) linearmente in relazione all’alzata della valvola che è proporzionale all’ intensità della deformazione che devono subire le celle. Si è quindi definito un coefficiente “K”, che è il rapporto tra l’alzata attuale e l’alzata massima della valvola(3.7).
)
2
max(
)
2
(
Vlift
Vliftnow
K
=
(3.7) Questo coefficiente vale 0 quando la valvola è chiusa ed 1 quando è totalmente aperta.Tramite questo coefficiente l’entità della dipendenza delle componenti dei nodi nella direzione x ed y, varia con continuità in relazione alla posizione della valvola. Le equazioni che sono state implementate sono queste:
{
K
[
z(im)
z(ip)
z(jm)
z(jp)
]
z(km)
z(kp
)
}
K
zn
∗
∗
+
+
+
+
+
∗
+
=
4
2
1
(3.8){
K
[
x(jm)
x(jp)
(x(im)
x(jp))
]
x(km)
x(kp)
}
K
xn
∗
∗
+
+
∗
+
+
+
∗
+
=
2
6
2
1
(3.9)Le equazioni (3.8) e (3.9) permettono di ottenere una griglia di buona qualità per tutto il ciclo di calcolo con sensibili vantaggi in termini di tempo di calcolo anche nei casi in cui la geometria è semplice.
Fig.3.15:visualizzazione della griglia del Fig.3.16: visualizzazione della griglia del piano piano di simmetria al PMS con ANSYS. passante per la mezzeria della valvola al
Fig.3.19: visualizzazione della griglia del Fig.3.20: visualizzazione della griglia del piano piano di simmetria 135°dopo il PMS con passante per la mezzeria della valvola 135°
ANSYS. dopo il PMS con ANSYS.
Fig.3.21: visualizzazione della griglia del Fig.3.22: visualizzazione della griglia del piano piano di simmetria 270°dopo il PMS con passante per la mezzeria della valvola 270°
ANSYS. dopo il PMS con ANSYS.
Le altre modifiche apportate riguardano l’ algoritmo della regione zsquish=4, ovvero il primo strato di vertici che si trova sotto la valvola.
L’equazione originale è la (3.10) e prevede che queste celle traslino con la valvola e si trovino sempre 0.7 mm sotto di esse.