Capitolo 1
1.1
Introduzione alla RM
In tempi molto recenti (1970), è stata inventata una tecnica di imaging medico clinicamente molto importante: la risonanza magnetica, RM (magnetic resonance imaging, MRI). Tale tecnica, non invasiva, ha soppiantato molte delle procedure convenzionali invasive, che utilizzando radiazioni ionizzanti creano danni cellulari a livello microscopico.
Per compiere un’indagine MRI deve realizzarsi, in forma rigorosamente controllata, tutta la sequenza di eventi fisici che va dall’induzione della magnetizzazione tessutale di equilibrio da parte del campo magnetico statico, all’eccitazione del sistema di spin tramite il campo a radiofrequenze (RF), al rilevamento del segnale di rilassamento codificato tramite i gradienti di campo magnetico, alla sua elaborazione fino a dar luogo ad un’immagine o ad uno spettro; al momento attuale il nucleo atomico per la formazione di immagini RM e per l’acquisizione di spettri RM con l’apparecchiatura in oggetto è quello degli atomi di idrogeno presenti in numero elevato nel corpo umano sotto forma d’acqua.
Il segnale RM è quindi semplicemente proporzionale al volume dell’acqua, la chiave innovativa della RM è imporre variazioni spaziali al campo magnetico per determinare la posizione degli spin. L’applicazione di un gradiente di campo magnetico (campo magnetico tempo-variante) causa un’oscillazione di ogni regione del volume a diverse frequenze, l’analisi di tali frequenze è eseguita da un algoritmo chiamato trasformata di Fourier (FT). Il più efficace campo non uniforme è un gradiente lineare dove il campo e la risultante frequenza variano linearmente con la distanza lungo l’oggetto studiato.
Quindi dall’analisi di Fourier del segnale si ottiene una mappa delle distribuzioni spaziali degli spin, da questo deriva la potente analisi K-space della RM.
Il concetto di k-space è una generalizzazione di una semplice relazione tra un segnale tempo-variante e uno spettro a due o più dimensioni. Un’immagine è riferita ad un insieme di dati del k-space a due dimensioni attraverso una trasformata di Fourier bidimensionale(2DFT) nello stesso modo uno spettro è riferito ad un segnale attraverso (monodimensionale) la FT. La trasformata bidimensionale di Fourier è ottenuta attraverso una trasformata FT riga-per-riga e colonna-per-colonna. La trasformata di Fourier è un’operazione che preserva le informazioni quindi il k-space contiene esattamente le stesse informazioni dell’immagine.
Uno dei vantaggi della RM è la possibilità di distinguere diversi tipi di tessuti poiché ci sono diversi parametri specifici che influenzano il segnale e, attraverso la scelta di particolari sequenze di scansione, mettere in evidenza alcuni parametri caratteristici e quindi indagare in modo più approfondito diversi tipi di patologie.
Un ulteriore vantaggio è costituito dalla possibilità di acquisire immagini su diversi piani, quest’acquisizione multiplanare permette la ricostruzione tridimensionale, attraverso un’elaborazione al computer dell’insieme di immagini, dell’organo in esame.
1.1.2 Principi fisici
Il termine ‘’risonanza’’ si riferisce allo scambio di energia tra due sistemi fisici: questo scambio è maggiore quando i due sistemi hanno le stesse caratteristiche intrinseche, ad esempio la stessa frequenza di oscillazione. Nel caso della risonanza magnetica il sistema che eroga energia è rappresentato dalle onde elettromagnetiche a radiofrequenza (RF) che disturbano l’equilibrio dei nuclei di idrogeno immersi in un forte campo magnetico che causa il loro ordinamento lungo una stessa direzione. Gli atomi di H rappresentano quindi il sistema accettare: lo scambio di energia avviene però solo se la frequenza delle onde RF è uguale alla frequenza caratteristica dei nuclei di H. Quando lo stimolo fornito dalle onde a RF cessa, i nuclei cedono l’energia acquisita sottoforma di onde a radiofrequenza, secondo
diverse modalità che dipendono dal sistema chimico-biologico che essi costituiscono.
I nuclei di idrogeno hanno numero quantico di spin diverso da zero e quindi possiedono un momento angolare, cioè un movimento di rotazione: all’interno dei tessuti biologici essi sono orientati casualmente ma se vengono immessi in un campo magnetico essi si orientano lungo la sua direzione (in verso concorde o discorde), inoltre acquistano un’ulteriore rotazione. Il movimento che ne risulta è detto di “precessione” (Figura 1).
Figura 1: Movimento di precessione del nucleo atomico
Affinché si verifichi il fenomeno della risonanza magnetica, e quindi lo scambio di energia, è indispensabile che le onde RF di eccitazione abbiano frequenza uguale a quella di precessione dei protoni di H, che è data da:
0 0 γB
ω = (1)
In tale equazione γ è detta costante giromagnetica (per l’idrogeno vale 42,6 MHz/T) e B è l’intensità campo magnetico statico nel quale sono immersi gli0
atomi di H (si misura in Tesla, 1T=10.000 Gauss). Ad esempio per un B =1,5T0
la frequenza di Larmor è pari a 63,85 MHz.
L’insieme dei nuclei allineati lungo la direzione del campo magnetico statico può essere considerato come un unico vettore avente direzione e verso pari a quelli di B , detto di “magnetizzazione macroscopica” M. Maggiore è il valore di0
0
B , maggiore sarà la magnetizzazione M e maggiore sarà il segnale RM.
Quando i nuclei acquistano energia da un’onda di eccitazione RF perdono la loro situazione di equilibrio: a seconda della durata dell’impulso, un certo numero di protoni allineati al campo con verso concorde (il livello energetico più basso) si porteranno ad un livello energetico più alto, quindi a disporsi in verso discorde a B fino al bilanciamento numerico delle due popolazioni e al0
raggiungimento di una sincronizzazione di fase. L’impulso RF responsabile di questo fenomeno è detto “impulso RF a 90°” e fa sì che la magnetizzazione M compia un moto a spirale fino a porsi sul piano trasversale alla direzione di B0
(Figura 2).
Quindi la magnetizzazione che prima era costituita dalla sola componente longitudinale (ML) lungo z (lungo B ), alla fine dell’impulso a 90° risulta0
costituita dalla sola componente trasversale (MT).
Un impulso a 180° causa invece l’inversione del vettore ML che continua il suo movimento a spirale fino a disporsi nuovamente sull’asse z ma con verso contrario a quello iniziale. Alla fine dell’impulso a RF di eccitazione, il sistema di protoni ritorna alla situazione energetica di partenza (rilassamento protonico) cedendo energia all’ambiente ed emettendo un segnale chiamato FID (Free Induction Decay) che costituisce appunto il segnale RM (Figura 3).
Figura 3: Segnale RM o Free Induction Decay (FID).
L’intensità di questo segnale è direttamente proporzionale alla densità protonica, cioè alla quantità di protoni di H per unità di volume (voxel) e quindi alle caratteristiche del tessuto in esame.
La durata del segnale è invece legata ai tempi di rilassamento T1 e T2.
Il primo (detto anche longitudinale o spin-reticolo), è legato al ritorno alla situazione di partenza della magnetizzazione longitudinale ed è correlabile agli scambi termodinamici che avvengono nel tessuto in esame. Il secondo (detto anche trasversale o spin-spin), regola l’annullarsi della magnetizzazione
trasversale creata dall’impulso RF. Ogni tessuto biologico, sano o patologico, emette un segnale diverso che è legato da un’equazione alla densità protonica (DP), ai tempi T1 e T2 e ai tempi di ripetizione TR ed echo TE come segue:
(TET2)
[
1
e
(TRT1)]
DPe
S
=
−−
− (2)Un altro parametro importante è il tempo di rilassamento T2*: esso è legato alla perdita di coerenza di fase della MT determinata sia da scambi energetici tra spin e spin sia dalla disomogeneità del campo magnetico che il vettore incontra durante il suo moto sul piano trasversale.
Per ottenere il risultato finale occorre un ulteriore passo e cioè quello della localizzazione: per ottenere un’immagine dell’organo sotto esame è fondamentale localizzarlo spazialmente. A questo scopo vengono sovrapposti al campo magnetico statico dei gradienti di campo, ovvero dei campi magnetici variabili nello spazio e nel tempo, che hanno proprio la funzione di dare una collocazione spaziale alle sorgenti dei vari segnali ricevuti dal sistema, matematicamente essi sono:
x B Gx =∂ z ∂ Gy =∂Bz ∂y (3)
z
B
G
z=
∂
z∂
Tali gradienti vengono applicati durante il periodo in cui viene inviato l’impulso a RF e permettono di selezionare una particolare fetta (slice) nel volume sotto indagine. Esiste un gradiente di campo per ognuno dei tre assi X, Y, Z tanto da rendere possibile la selezione di sezioni assiali, sagittali o secondo qualsiasi altro piano dello spazio combinandoli fra loro. G serve per lax codifica in frequenza (frequency encoding), G per la codifica di fase (phasey encoding) e G per la selezione della fetta (slice selection). z
Ogni bobina può essere cambiata indipendentemente, e le bobine possono pulsare simultaneamente e produrre un gradiente in una direzione arbitraria dato da:
G
=
(
G
x,
G
y,
G
z)
(4)Usando quindi questi gradienti, si fa in modo che la precessione del vettore magnetizzazione sia determinata dalla sua posizione. Se il vettore magnetizzazione è posizionato a r, la frequenza di precessione sarà:
ω
( )
r =−γ(
B0 +G⋅r)
(5)Grazie a questi gradienti di campo è possibile selezionare lo strato da esaminare e fornire quindi le coordinate spaziali necessarie alla ricostruzione dell’immagine.
1.2 Introduzione al k-spazio
Nella RM noi riceviamo un volume integrale da un array di oscillatori, assicurando che la fase di ogni oscillatore sia unica, si può assegnare un’unica locazione ad ogni spin e quindi ricostruire un’immagine. Durante la ricezione del segnale si applica un campo magnetico nella direzione z. Gli spin processeranno, come già detto, nel piano xy alla frequenza di Larmor:
ω = - γ B
Quindi uno spin alla posizione r = (x, y, z) ha un’unica fase θ che descrive l’angolo relativo all’asse y nel piano xy:
( )
r
,
t
=
−
γ
∫
0tB
z( )
r
,
τ
d
τ
θ
dove Bz
( )
r, è la componente z della densità del flusso magnetico locale.tQuesta formula assume che non ci sono componenti di campo lungo x e y. Una bobina abbastanza larga da ricevere uniformemente un flusso tempo-variante produce un segnale proporzionale a:
( )
( )
( )∫
−∝
V t r idr
e
r
M
dt
d
t
s
θ ,doveM
( )
r rappresenta la densità del momento di equilibrio ad ogni punto r. L’idea chiave per l’imaging è sovrapporre un gradiente di campo lineare al campo statico B . Il campo punta nella direzione z, e la sua ampiezza varia0linearmente con la direzione coordinata. Per esempio, un gradiente x punta nella direzione z, e varia lungo la coordinata x, questo è descritto attraverso il vettore di campo xGxzˆ , dove zˆ è il vettore unitario nella direzione z. In generale il gradiente è
(
xGx +yGy +zGz)
zˆ, che può essere riscritto in modo compatto come G⋅r⋅zˆ. Queste componenti possono variare con il tempo,così il campo totale z è:
( )
r t B G( )
t rBz , = 0 + ⋅
In presenza di questo gradiente generale tempo-variante, il segnale ricevuto è:
( )
∝
∫
−( )
−∫
( )⋅ V rdt G i t B iM
r
e
dr
e
dt
d
t
s
t 0 0 τ γ γLa frequenza centrale γB0 è sempre più larga della banda del segnale. Quindi
l’operazione di derivata è circa equivalente a moltiplicare per −iω0. Il segnale
è demodulato attraverso la forma d’onda i Bt
eγ 0 per ottenere il segnale in
“banda base”:
( )
∝
−
∫
( )
−∫
( )⋅ V rd G idr
e
r
M
i
t
s
t τ τ γω
0 0Si può adesso definire il termine k
( )
t :( )
t =∫
t G( )
d k 0 τ τ γQuindi si può riscrivere il segnale ricevuto in banda base come:
( )
( )
( )∫
− ⋅∝
V rdt t ikdr
e
r
M
t
S
il quale può essere ora identificato come la trasformata spaziale di Fourier di
( )
rM valutata a k
( )
t . Quindi l’imaging RM, con gradiente lineare, può essere visto come una “scansione” del k-spazio o come trasformata di Fourier spaziale dell’immagine.Durante la scansione quindi, i segnali sono scritti nell’array k-spazio, si usa poi un algoritmo di ricostruzione – che spesso è la trasformata di Fourier - che prende le informazioni dal k-spazio e le converte in un’immagine, vedi Figura 4. Come i segnali sono mappati in questo spazio k ha un importante effetto sulla risoluzione spaziale e temporale dell’immagine risultante e sulla durata della scansione.
Figura 4. Corrispondenza tra array k-spazio (a) e dominio immagine (b) [Rif. 3]
Si definiscono alcuni parametri d’interesse per il k-spazio, assumendo che la direzione verticale dell’immagine sia y, il corrispettivo nello spazio k è ky
(phase encoding), mentre per la direzione x si avrà k (readout o frequencyx encoding). Dove kx =γGxt e ky =γGyt, G è l’ampiezza del gradiente dix readout e G è l’ampiezza del gradiente phase encode. Per un imaging cony un sistema a 1.5 Tesla si usa tipicamente un gradiente pari a Gx =1 G/cm. Attraverso le caratteristiche della scansione k-space sono completamente determinate le caratteristiche fondamentali dell’immagine, quali risoluzione e field of view (FOV). L’estensione della copertura del k-space determina la risoluzione dell’immagine ricostruita, la risoluzione è inversamente proporzionale alla più alta frequenza acquisita:
(
)
π γ π 2 max 1 k G T x x x = = ∆(
)
π γ π 2 max 1 ky GyTphase y = = ∆dove T è la durata di readout e Tphase è la durata del gradiente G . Quindi pery ottenere una migliore risoluzione si potrebbe usare gradienti molto forti o readout molto lunghi, queste condizioni incontrano però seri ostacoli, quali un aumento del tempo di scansione e un degrado del SNR (rapporto segnale-rumore) dell’immagine.
Per dati acquisiti su una griglia rettilinea in 2D nel k-spazio, ricostruiti con la trasformata di Fourier in 2D, la relazione tra risoluzione spaziale e FOV è:
x x k FOV =1/∆ FOVy =1/∆ky kx W x=1/ ∆ ∆y=1/Wky
Dove ∆kx e ∆ky sono le ampiezze degli intervalli di frequenza nelle direzioni x e y rispettivamente W e kx W sono le frequenze massime che contengono leky informazioni sull’oggetto, vale a dire:
t G kx = x∆ ∆ π γ 2 y G ky = y∆ ∆ π γ 2 x kx N k W = ∆ y ky M k W = ∆
Dove N è il numero di campioni lungo G , e M è il numero di volte che ilx gradiente di fase viene attivato.
Nella direzione phase-encode, i dati del k-spazio sono campionati discretamente, questo campionamento discreto nel k-spazio introduce repliche nel dominio immagine. Se il campionamento del k-spazio è fine quanto 1/FOV, allora l’immagine dell’oggetto non si ripiega su se stessa,
mentre se il campionamento del k-spazio è grossolano rispetto a 1/FOV, l’immagine dell’oggetto si ripiegherà su se stessa; questo è l’aliasing.
Continuando nell’intento di fornire tutte le basi necessarie per poter capire e leggere il k-spazio, bisogna dire che il numero di punti raccolti lungo ogni asse del k-spazio è tipicamente una potenza di 2 ( ad es. 64, 128 o 256 ). Questo perché nella scansione RM – come già detto – la trasformata discreta di Fourier, FT, che richiede 2npunti.
Le coordinate del k-spazio sono frequenze spaziali e hanno come unità di misura il reciproco di una distanza, millimetri−1. Queste frequenze spaziali
descrivono come cambiano le caratteristiche di un’immagine in funzione della posizione.
Se rappresentiamo il k-spazio come una griglia rettilinea, vedi Figura 2, al centro del k-spazio si hanno informazioni relative alle basse frequenze spaziali, contiene quindi la maggior parte del segnale, codifica la forma e le dimensioni dell’immagine. I bordi del k-spazio contengono invece le informazioni relative alle alte frequenze, quindi codifica i dettagli, cioè quelle zone nelle quali il segnale cambia rapidamente. In figura vengono inoltre mostrate le relazioni tra ∆kx e ∆x, e tra ∆ky e y∆ .
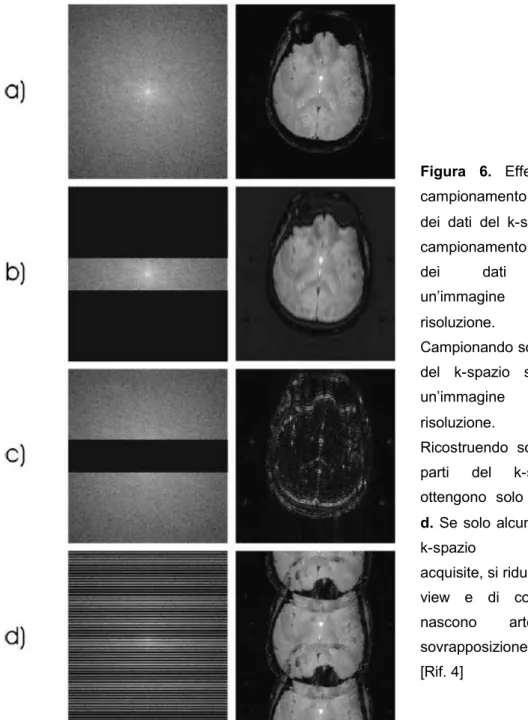
Si veda come esempio dell’effetto di un campionamento parziale del k-spazio Figura 6. Una immagine ricostruita dai dati mappati al centro del k-spazio, quindi basse frequenze spaziali, ha bassa risoluzione (Fig. 6b) mentre un’immagine ricostruita attraverso i dati contenuti nel perimetro del k-spazio rivela un’immagine debole dei dettagli (Fig. 6c).
Un’altra cosa da tenere in considerazione è che la MRI è l’unico sistema di imaging per il quale la risoluzione è indipendente dalla lunghezza d’onda. La ragione di questo è che nessun tentativo è fatto per focalizzare la radiazione su un unico pixel o voxel (elemento di volume), come si fa per tutte le altre modalità di imaging. Invece i gradienti creano variazioni spaziali del campo magnetico così che ogni singolo pixel emette un’unica forma d’onda. Questi segnali sono decodificati e assegnati ad un’unica posizione.
Figura 5. Caratteristiche generali del k-spazio [Rif. 3]
Uno svantaggio della scansione 2D del k-spazio è che il tempo di scansione è proporzionale al numero di phase encodes. Bisogna comunque trovare un compromesso tra un buon SNR e un tempo di scansione corto. Questo è particolarmente vero quando gli artefatti dovuti al movimento dominano il rumore termico. Per consentire un compromesso flessibile tra SNR e tempo di imaging, più di una singola linea deve essere coperta in una singola eccitazione. I vari modi per attraversare il k-spazio sono detti k-traiettorie.
Figura 6. Effetto di un campionamento parziale dei dati del k-spazio. a. Il campionamento completo
dei dati produce
un’immagine a alta
risoluzione. b.
Campionando solo il centro del k-spazio si produce un’immagine a bassa
risoluzione. c.
Ricostruendo solo le altre parti del k-spazio si ottengono solo i contorni. d. Se solo alcune linee del
k-spazio vengono
acquisite, si riduce il field of view e di conseguenza nascono artefatti di sovrapposizione (aliasing). [Rif. 4]
1.3 Traiettorie nel k-spazio
Ci sono molti differenti modi per collezionare i dati necessari per un’immagine, questo è detto riempire il k-spazio, e l’ordine con il quale (k , x k ) i punti sonoy acquisiti è descritto attraverso la traiettoria del k-spazio. La formulazione di queste k-traiettorie si applica solo ai metodi nei quali viene prodotto un FID (Free Induction Decay) con o senza echo, cioè quando viene prodotto un
segnale s(t) ( vedi par. 1.2 ) da un sistema di spin in risposta all’applicazione di un impulso RF.
Ci sono quattro principali classi di traiettorie: rettilinea non-EPI (echo planar imaging), EPI, radiale e spirale. All’interno di queste classi di traiettorie ci sono spesso variazioni relative al tempo di acquisizione dei dati. Queste differenti traiettorie con molte delle loro variazioni sono riportate nella tabella 1.
1.3.1 Traiettoria non-EPI rettilinea
Molte tecniche MRI usano traiettorie rettilinee linea per linea nelle quali una linea di dati, che include tutti i valori di k per un valore fissato di x k , vieney acquisita dopo un’eccitazione. Allora, dopo il tempo di ripetizione TR, occorre un’altra eccitazione per acquisire un’altra linea. Il tempo di scansione è dunque #k linee * TR * (numero dei segnali mediati).y
Questa traiettoria rettilinea può essere usata con sequenze di impulsi quali spin echo (SE), gradient echo (GE) e inversion recovery (IR). Come si vede nella tabella 1 [Rif. 3], ci sono un gran numero di variazioni di questo tipo di traiettoria, ognuna sviluppata per situazioni nelle quali alcuni aspetti dell’immagine cambiano nel tempo, come contrasto o posizione, o nelle quali ridurre il tempo di scansione è critico.
Queste traiettorie non-EPI hanno il vantaggio che i tempi di acquisizione dei dati all’interno di ogni eccitazione è corto rispetto alla costante di decadimento del segnale T2* e rispetto ai tempi di altri artefatti di distorsione di campo.
Tabella 1
Traiettoria Maggiori
opzioni
commenti Applicazioni
non-EPI
rettilineo sequenziale Acquisisce ogni linea readout, dall’alto al basso del k-spazioky in separati
Per applicazioni di imaging standard nelle quali il relativo contrasto è costante per ogni eccitazione
centrico
Acquisisce ogni linea kyin separati readout partendo dalla linea centrale del k-spazio(ky=0) e alternando su e giù in successive applicazioni.
Per le applicazioni nelle quali l’intento è avere un contrasto relativo iniziale che domina il contrasto dell’immagine come dopo una pulsazione RF preparatoria o iniezione di agenti di contrasto.
Centrico inverso
Acquisisce ogni linea ky in separati readout, partendo dalle linee esterne del k-spazio e camminando verso l’interno da ogni bordo in eccitazioni successive.
Per le applicazioni nelle quali l’intento è avere un contrasto relativo finale che domina il contrasto dell’immagine come dopo una pulsazione RF preparatoria.
View-sharing Acquisisce un set incompleto di linee
y
k
per differenti immagini cine phases .
Per applicazioni cinetichedove sia necessario un tempo totale di scansione corto , un’alta risoluzione temporale e una buona risoluzione spaziale
Keyhole Acquisisce una matrice completa del k-spazio, una linea alla volta, tipicamente dall’alto al basso del k-spazio
Per l’imaging di eventi dinamici i quali producono immagini multiple, in cui l’alta risoluzione temporale e spaziale sono molto importanti
Fast spin echo/turbo
spin echo
Acquisisce linee multiple del k-spazio per ogni eccitazione, con ogni linea acquisita dopo un nuovo impulso a 180° che genera un echo
Per ridurre il tempo di scansione totale per lunghi TR- tempo di ripetizione della sequenza di
impulsi-Half-Fourier o Fourier parziale
Acquisisce le linee per riempire in un momento più della metà superiore del k-spazio. Quindi lavora sulla simmetria del k-spazio per replicare i dati mancanti con una ragionevole stima
Per situazioni nelle quali riducendo il tempo di scansioni di un fattore circa 2
EPI Blipped-singleshot
Attraversa tutto il k-spazio, ricopre una griglia rettilinea, partendo da un angolo, attraversa l’asse kxper un dato valore di
y
k , qiundi salta (‘’blipping’’) al valore successivo diky e tornando indietro attraversa l’asse kx. Un altro blip segue al valore successivo di ky, così da attraversare tutto il k-spazio
Per applicazioni che richiedono acquisizioni molto veloci. E’ particolarmente buono per la RM funzionale ( fMRI ) poiché si ha alta velocità e sensibilità all’effetto BOLD- Blood Oxygenation Level
Dependent- Blipped-multishot
Attraversa in modo sparso tutto il k-spazio,ricopre una griglia rettilinea, partendo da un angolo attraversa l’asse
x
k per un dato valore di ky, qiundi salta (‘’blipping’’) ad un differente valore di ky
e tornando indietro attraversa l’asse kx. Un altro blip segue un altro valore di ky, così una frazione del k-spazio uguale a 1/
(#shot ) è riempita.
Per applicazioni che richiedono un’acquisizione molto veloce ma non veloce quanto la single shot EPI. Può anche essere usata per riempire un ampio k-spazio e quindi ottenere una migliore risoluzione spaziale di quanto sia possibile con la single shot EPI. Allora il tempo speso per acquisire i dati è più corto che nella single shot EPI
Radiale reconstructionProjection
Attraversa una linea radiale del k-spazio per ogni eccitazione, con le eccitazioni successive si riempie il k- spazio come fosse la ruota di una bicicletta.
Per applicazioni che richiedono un TE estremamente corto. Allora il perimetro del k-spazio è campionato in modo sparso, quindi i dettagli dell’immagine non sono ben risolti. Mentre un fitto campionamento al centro del k-spazio riduce gli artefatti dovuti al movimento e migliora il SNR
Spirale Spiral out
Attraversa tutto il k-spazio formando una spirale che parte dal centro e si estende verso l’esterno.
Per applicazioni che richiedono l’acquisizione in un singolo passo e un TE nominale più corto possibile. La simmetria del k-spazio e il campionamento iniziale al centro del k-spazio relativo all’eccitazione riducono il movimento e le distorsioni dipendenti dal campo
Spiral in Attraversa tutto il k-spazio formando unaspirale che parte dal perimetro del k-spazio e si estende verso l’interno
Per applicazioni che richiedono l’acquisizione in un singolo passo (estremamente veloce) con alto SNR per i dati sul perimetro del k-spazio e un TE nominale lungo.
Multiple spirals
Attraversa tutto il k-spazio in modo sparso con spirali multiple, ognuna acquisita dopo una separata acquisizione.
Per applicazioni che richiedono un’acquisizione veramente veloce ma non veloce quanto l’imaging a spirale in un unico passo. Può essere anche usato per riempire il k-spazio più densamente per ottenere miglior risoluzione spaziale e miglior SNR.
Imaging
parallelo SMASH
Usa una geometria specifica delle bobine ricevitrici per creare informazioni addizionali sul k-spazio senza aggiungere scansioni.
Per applicazioni che richiedono un tempo di imaging ridotto, che possono sopportare una riduzione del SNR. Tipicamente eventi dinamici come l’imaging cardiaco.
SENSE Usa una mappa di sensibilità di un arraydi bobine ricevitrici per considerare i dati mancanti dovuti al sottocampionamento.
Per applicazioni che richiedono un tempo di imaging ridotto, che possono sopportare una riduzione del SNR. Tipicamente eventi dinamici come l’imaging cardiaco
Prior
information BLAST
Utilizza informazioni raccolte in
precedenza per stimare come cambiano i segnali nel caso di imaging dinamico
Per applicazioni che richiedono un tempo di imaging ridotto che possono sopportare una riduzione del SNR. Tipicamente eventi dinamici come l’imaging cardiaco.
Il tempo che ci vuole per attraversare l’asse di readout una volta è veramente corto, dell’ordine dei millisecondi. Di conseguenza gli artefatti relativi a traiettorie di lunga durata sono minimizzati nella scansione non-EPI rettilinea. Allora le codifiche di fase avvengono tutte allo stesso istante all’interno di ogni ripetizione, il tempo è, in sostanza, congelato nell’attraversamento dell’asse ky e quindi l’evoluzione degli artefatti non è visibile nella direzione y.
1.3.2 Traiettoria EPI
Questa traiettoria spazza avanti e indietro molto rapidamente l’intera matrice del k-spazio ( o una larga parte di esso ) che viene riempita in un’unica ripetizione della sequenza di impulsi. Tipicamente questa traiettoria inizia da un angolo del spazio e finisce nell’angolo diametricalmente opposto.Se l’intero k-spazio è riempito in una sola esecuzione della sequenza di impulsi allora essa è definita un’acquisizione single shot.
Il tempo di scansione è quindi solo il tempo di echo TE più il tempo necessario per finire la seconda metà del campionamento dei dati, con la prima metà dei dati collezionati precedente a TE. Se invece è necessaria più di un’esecuzione della sequenza di impulsi per raccogliere tutti i dati del k-spazio desiderati, allora la scansione è un’acquisizione multishot e il tempo di scansione è TR volte il numero di esecuzioni. La traiettoria del k-spazio per una tipica tecnica EPI è mostrata in Figura 7.
Figura 7. Traiettoria EPI del k-spazio, tutte le linee del k-spazio sono riempite dopo una singola eccitazione RF
La caratteristica che rende veramente interessante la tecnica EPI è un corto tempo di scansione. Questo, combinato con la sensibilità dei gradienti ai cambiamenti locali di ossigenazione ( effetto BOLD –Blood Oxygen Level
Dependent ) rende l’EPI molto usato per gli studi sulle funzioni celebrali nella RM funzionale.
In termini di gradienti di campo, il metodo EPI è così descritto:
Figura 8: Sequenza di impulsi EPI con gradiente di fase (G ) e gradiente di frequenza (y G ). x
1.3.3 Tecniche di imaging parallelo
Le tecniche di imaging parallelo sono principalmente il metodo SMASH (SiMultaneous Acquisition of Spatial Harmonics) e SENSE (SENSitivity Encoding). In queste tecniche, la posizione unica dalla quale proviene il segnale da ogni tessuto, è codificata sia attraverso la codifica dei gradienti (k-spazio) sia attraverso l’uso simultaneo di bobine ricevitrici multiple, come fosse un array di bobine. Tali ricevitori multipli individuano le informazioni per la codifica spaziale, tale codifica addizionale permette una riduzione del numero di linee nel k-spazio da acquisire. Si può ottenere con questo metodo riduzioni di un fattore compreso tra 1.5-4. Per esempio, un fattore di accelerazione pari a due richiede l’uso di almeno due bobine ricevitrici e il numero delle linee acquisite nel k-spazio si riduce di un fattore 2. In questo caso tutte le altre linee del k-spazio sono acquisite usando la codifica tradizionale con i gradienti.
Entrambe le tecniche viste sopra utilizzano, dunque, le posizioni rispetto al paziente delle bobine ricevitrici per codificare i segnali. SMASH genera direttamente le linee del k-spazio mancanti prima dell’applicazione della FT utile per la ricostruzione dell’immagine. SENSE usa i profili di sensibilità delle bobine ricevitrici per eseguire un’operazione simile a quella sopra.
La riduzione del tempo di scansione si ottiene, però, a spese di un degrado del SNR e a spese di un peggioramento della qualità dell’immagine dovuto alla presenza di artefatti.



![Figura 4. Corrispondenza tra array k-spazio (a) e dominio immagine (b) [Rif. 3]](https://thumb-eu.123doks.com/thumbv2/123dokorg/5674334.72243/10.892.173.763.141.478/figura-corrispondenza-array-k-spazio-dominio-immagine-rif.webp)
![Figura 5. Caratteristiche generali del k-spazio [Rif. 3]](https://thumb-eu.123doks.com/thumbv2/123dokorg/5674334.72243/13.892.172.726.145.590/figura-caratteristiche-generali-del-k-spazio-rif.webp)