CAPITOLO 1
Il Sistema Satellitare GPS
1.1 Introduzione
Il sistema NAVSTAR GPS (Navigation System with Time and Ranging Global Positioning System), è un sistema satellitare basato su una costellazione di 24 satelliti orbitanti ad una quota di circa 20.200 Km e quindi con un periodo orbitale di 12 ore siderali.
Esso rappresenta un sistema di navigazione globale in grado di fornire, con estrema precisione, le coordinate geografiche, la quota e la velocità di qualsiasi mezzo mobile in ogni punto della Terra e per l’intero arco delle 24 ore.
Il programma per la realizzazione del sistema fu ideato dal DoD (Department of Defence degli USA) nel 1973 per consentire a navi, aeroplani e veicoli terrestri delle forze armate degli USA di determinare, in qualsiasi istante, la propria posizione in qualunque parte del globo si trovassero. Pur essendo stato concepito per scopi militari, i progettisti del sistema fecero in modo che anche i civili potessero usarlo, anche se con una precisione minore. I primi 11 satelliti di tipo sperimentale furono lanciati dal 1978 al 1985 e furono sostituiti successivamente da quelli operativi, a partire dal 1989.
A seguito del completamento della prevista costellazione di 24 satelliti, l’8 dicembre 1993, fu fatta una prima dichiarazione di inizio operatività del sistema (IOC o Initial Operational Capability). Al completamento di tutti i test per la verifica, in particolare, delle specifiche militari del sistema, esso fu definitivamente dichiarato operativo il 27 aprile 1995 (FOC o Full Operational Capability). L’interesse da parte della comunità scientifica internazionale verso il sistema, e gli studi condotti, hanno consentito anche agli apparati riceventi non militari di utilizzare il sistema con una precisione notevolmente superiore a quella ipotizzata dai progettisti. Per tale motivo le applicazioni pratiche nel settore civile sono diventate numerosissime, anche al di fuori dei campi tradizionali della navigazione marittima ed aerea, ad esempio:
• è utilizzato quale sistema base per il controllo della navigazione aerea ed anche di quella marittima nelle aree di maggior traffico;
• esso viene utilizzato dall’industria petrolifera, o in generale estrattiva, per la determinazione della posizione di mezzi terrestri e navali impiegati nelle ricerche o nelle estrazioni petrolifere. Il sistema è anche utilizzato nell’industria offshore per mantenere in posizione le piattaforme petrolifere.
• L’estrema precisione del sistema consente il controllo della posizione di automezzi terrestri e precisamente un ricevitore GPS determina con continuità la posizione che viene comunicata via radio ad una centrale di controllo. Tali sistemi sono utilizzati da alcune società di trasporti quale strumento antifurto per i propri automezzi; sono utilizzati dai servizi di assistenza e di protezione civile per una migliore gestione ed utilizzo dei mezzi di soccorso. È prevedibile che esso potrà essere utilizzato anche nel controllo del traffico ferroviario.
• Considerati i bassi costi e le dimensioni ridotte dei ricevitori attuali, il sistema può essere utilizzato da ricercatori o altre persone durante l’esplorazione di zone terrestri isolate. Sono inoltre già state commercializzate applicazioni, analoghe a quelle in uso sulle navi, in cui il ricevitore GPS è collegato ad un apparato che rappresenta su un monitor la mappa della zona con l’indicazione continua della posizione del ricevitore. Diversi modelli di auto prevedono tale optional.
• L’introduzione del DGPS o GPS differenziale ha consentito di raggiungere precisioni adeguate per poterlo utilizzare quale strumento di posizione, sia statico che dinamico, nelle misure geodetiche, geofisiche, idrografiche e cartografiche. Molti laboratori scientifici utilizzano inoltre i segnali GPS per avere l’ora UTC (Universal Time Coordinated) con una precisione di 0,1 microsecondi. Le applicazioni elencate sono soltanto alcune di quelle in uso, molte altre sono allo studio per cui il sistema avrà un’importanza sempre maggiore in tutti i campi della vita civile.
1.2. I segmenti del sistema GPS
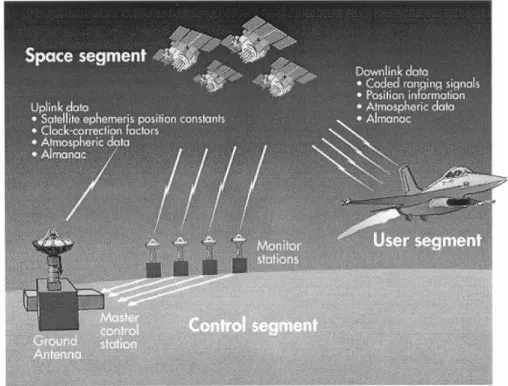
Fig. 1.2– Rappresentazione dei tre segmenti in cui è diviso il sistema (The Aerospace Corporation - USA, 1996)
Nel suo insieme, il sistema GPS può essere diviso in tre distinte componenti alle quali ci si riferisce formalmente come segmento spaziale, segmento operazionale e di controllo e segmento d’utente. La descrizione di questi componenti è presentata nei sottoparagrafi seguenti.
1.2.1. Segmento spaziale
Il segmento spaziale è composto da una costellazione di 28 satelliti – dei quali 24 operativi – che trasmettono dei codici di distanza a radiofrequenza e dei dati di navigazione.
I satelliti sono distribuiti su 6 diversi piani orbitali, distanziati tra loro di un angolo di 60° e formanti un angolo di 55° rispetto al piano equatoriale.
Fig. 1.2.2 – Orbita dei satelliti GPS
I 4 satelliti di ciascun gruppo sono spaziati uniformemente sul piano orbitale di appartenenza, tuttavia tale spaziatura può essere variata dal centro di controllo terrestre in dipendenza di particolari esigenze.
La quota teorica prevista è di 10.900 miglia nautiche, corrispondenti a circa 20.200 Km. Tale quota consente una adeguata visibilità dei satelliti da parte degli utilizzatori terrestri.
La costellazione di 24 satelliti, precedentemente descritta, è stata disegnata per consentire la presenza di almeno 4 di essi sopra l’orizzonte di una qualsiasi località terrestre e con un elevazione superiore a 5°. Tale copertura garantisce, inoltre, una adeguata distribuzione spaziale dei satelliti
anche nel caso in cui qualcuno di essi sia momentaneamente fuori servizio o disattivato; in tal modo è sempre possibile effettuare la navigazione tridimensionale (latitudine, longitudine e quota) e la sincronizzazione degli orologi di bordo, con un sufficiente grado di precisione.
Ogni satellite è dotato di pannelli solari e di retrorazzi per eseguire manovre correttive sull’orbita che può subire fluttuazioni periodiche, a causa di molteplici fattori, tra i quali i principali sono: la non perfetta sfericità della Terra e le attrazioni esercitate dal Sole e dalla Luna. L’influenza maggiore è data dalla maggiore massa equatoriale della terra, ma anche altri fattori possono entrare in gioco.
Un’altra dotazione importante, è rappresentata da 4 oscillatori, di cui 2 al rubidio e 2 al cesio. Tali orologi atomici sono quanto di più preciso offra la scienza per misurare il tempo, con una stabilità compresa tra 10-13 e 10-14 secondi su un giorno. Gli orologi di bordo, così come tutte le 6 orbite sono costantemente monitorati dalle stazioni di terra che provvedono ad operare le giuste correzioni qualora se ne presentasse il bisogno.
Il satellite, oltre a fornire misure di tempo molto precise, deve trasmettere segnali di tipo diverso, contenenti informazioni per gli utilizzatori a Terra per ricevere e memorizzare le informazioni trasmesse dalla rete di stazioni di controllo.
1.2.2. Segmento di controllo terrestre
Il sistema di controllo terrestre ha la funzione di seguire il moto orbitale dei satelliti ed il funzionamento dei loro orologi e quindi di aggiornare continuamente i dati conservati nelle memorie di bordo; secondariamente esso deve azionare, quando è necessario, i reattori per modificare la posizione dei satelliti quando si allontanano troppo dalla posizione assegnata, oppure, di disattivarli nel caso di malfunzionamento e sostituirli con quelli di riserva.
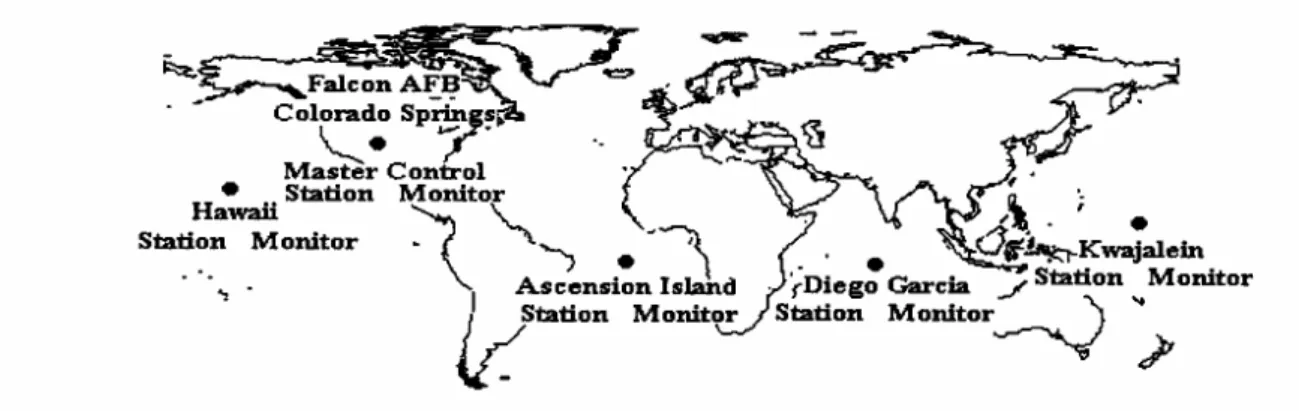
Il sistema è composto da una serie di stazioni equispaziate lungo l’equatore in maniera pressoché uniforme; la stazione principale di controllo (MSC o Master Station Control), che è il centro operativo del sistema, è situata a Colorado Spring negli Stati Uniti. Le altre stazioni sono situate nelle seguenti isole: Haway (nord Pacifico), Ascension (sud Atlantico), Diego Garcia (oceano Indiano) e Kwajalein (sud Pacifico). Tutte e 5 le stazioni svolgono la funzione di stazioni di monitoraggio (MS o Monitor Stations). Esse ricevono continuamente i segnali emessi da tutti i satelliti. I dati raccolti da ciascuna stazione comprendono il segnale di clock del satellite, le sue correzioni rispetto al tempo universale UTC (Universal Time Coordinate), le effemeridi dei satelliti e vari segnali di stato. Le effemeridi informano il ricevitore sull’esatta posizione del satellite nello spazio, così che il ricevitore possa conoscere perfettamente dove si trova l’origine del segnale che ha ricevuto. Inoltre, ogni satellite trasmette un almanacco, che è un’informazione più generale rispetto a quella contenuta nelle effemeridi, sulla posizione di tutti i satelliti della costellazione GPS; questo fa si che il ricevitore sappia sempre dove e quando ricercare i satelliti, nel momento dell’individuazione della posizione. I dati, una volta raccolti, vengono inviati alla stazione MCS che ha il compito di eseguire tutte le misure necessarie per correggere le informazioni inviate dai satelliti GPS. La MCS effettua una stima quotidiana dell’orbita e dell’offset d’orologio previsti per ciascun satellite nelle 24 ore successive, quindi le orbite vengono parametrizzate ed i dati inviati ai satelliti, i quali, a loro volta, inserendoli nei dati di comunicazione che diffondono continuamente, li comunicheranno agli utenti durante la giornata successiva.
Tali informazioni, indicate con il nome di Broadcast Ephemerides (effemeridi trasmesse), pur essendo comunicate dai satelliti in tempo reale, sono il risultato di previsioni effettuate 24 ore prima. Ci sono poi le Precise Ephemerides (effemeridi precise) che sono calcolate mediante un sofisticato programma di calcolo d’orbita che utilizza i dati raccolti in 8 giorni dalle stazioni di controllo sparse sul globo. Così facendo, si riesce a raggiungere un grado di precisione di circa 2 ordini di grandezza superiore rispetto alle Broadcast Ephemerides, a scapito di tempi più lunghi sia di elaborazione che di messa a disposizione dei relativi dati.
Il corretto utilizzo del sistema richiede una grande precisione nella determinazione del tempo, pertanto la MSC è dotata di una serie di orologi atomici che hanno la funzione di conservare il tempo del sistema al quale vengono riferiti tutti gli altri orologi, sia a terra che a bordo dei satelliti.
Fig. 1.2.2.2 – Schema di funzionamento del segmento di controllo
1.2.3. Il segmento utente
Il segmento utente è costituito dall’intera comunità militare e civile in grado di acquisire i segnali GPS. Ciascun ricevitore GPS consente di ottenere informazioni di posizione, velocità e tempo sulla base dei segnali di almeno 4 satelliti in visibilità.
Le possibilità operative, la riduzione dei costi dei ricevitori, la versatilità e la semplicità di esercizio hanno consentito di estendere l’utilizzo del GPS ben oltre l’ambito militare fino a trovare applicazioni in molti settori scientifici e di ricerca.
1.3 Introduzione al ricevitore GPS
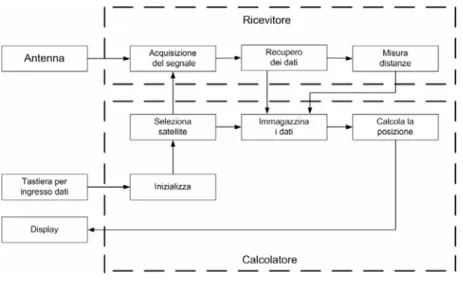
Un ricevitore GPS comprende essenzialmente 4 parti: l’antenna, il ricevitore, il processore ed i dispositivi per l’introduzione e la visualizzazione dei dati.
Le funzioni fondamentali di un ricevitore possono essere sintetizzate come segue:
• Selezionare 4 satelliti in base ai dati contenuti nell’Almanacco ed in modo che essi siano visibili e distribuiti opportunamente in azimut al fine di consentire la migliore determinazione della posizione.
• Individuare i segnali dei satelliti selezionati decodificandoli attraverso il loro codice PRN. • Decodificare i dati di navigazione contenuti nel messaggio trasmesso e memorizzarli nella
propria memoria.
• Misurare i ritardi nei tempi d’arrivo dei segnali dai satelliti e quindi calcolare le relative distanze.
Fig. 1.3 – Schema a blocchi delle funzioni di un ricevitore
Le suddette funzioni possono essere realizzate in diversi modi dipendenti dall’uso cui è destinato il ricevitore e dalla precisione dei risultati che si vogliono ottenere. Ad esempio, un ricevitore installato a bordo di un missile dovrà essere in grado di fare il punto con alta precisione e con continuità, mentre un ricevitore per navi mercantili potrà avere una precisione nettamente inferiore ed un aggiornamento dei dati molto meno frequente; nel primo caso il ricevitore deve avere un’alta dinamica, nel secondo caso una bassa dinamica.
Fondamentalmente i ricevitori possono essere di tre tipi:
• Ricevitori sequenziali. Sono dotati fisicamente di un solo canale che segue i quattro satelliti selezionati per la determinazione della posizione, uno dopo l’altro e per un periodo di tempo relativamente lungo (1÷2 sec); le misure di distanza sono quindi intervallate per cui il calcolo della posizione si effettua combinando una distanza effettivamente misurata con tre distanze stimate. Tali tipi di ricevitori sono piuttosto economici, ma, considerato il tempo piuttosto lungo (4÷8 sec) richiesto per l’osservazione dei quattro satelliti, non sono utilizzabili nei casi in cui la velocità di elaborazione è essenziale.
• Ricevitori multicanali. Sono dotati di più canali (fino anche a 10÷12) che seguono contemporaneamente un eguale numero di satelliti; ogni canale “aggancia” un satellite, demodula il segnale ed effettua la misura della distanza. Un microprocessore provvede successivamente a combinare tutte le osservazioni (simultanee) e a fornire la posizione ed altri dati istantanei come la velocità e la direzione; tali ricevitori sono più costosi e si prestano ad essere usati in tutti i casi dove è richiesta un’alta dinamica.
• Ricevitori multiplexed. Sono dotati di un solo canale e seguono sequenzialmente i satelliti selezionati effettuando però una loro completa scansione in meno di 20 msec che è la durata di un BIT nel messaggio di navigazione (trasmesso a 50 bps). Con questi ricevitori,
analogamente a quelli multicanali, i dati di navigazione sono ricevuti con continuità, senza le interruzioni tipiche dei ricevitori sequenziali. Le caratteristiche sono intermedie a quelle dei due precedenti tipi e con costi piuttosto contenuti.
1.4 Caratteristiche dei segnali GPS
1.4.1 Frequenze utilizzate e codici trasmessi
Tutti i satelliti trasmettono utilizzando due diverse portanti nella banda L che sono entrambe multiple di una frequenza fondamentale f0=10,23 MHz generata da una serie di oscillatori montati a bordo. Indicando con L1 e L2 le portanti si ha:
(
)
(
)
1 0 2 0 154 1575, 42 19 120 1227,60 24 L f MHz cm L f MHz cmλ
λ
= × = ≅ = × = ≅dove λ è la lunghezza d’onda pari λ= c/f (velocità della luce diviso la frequenza). Le due portanti sono modulate in fase con appositi segnali denominati:
• Codice P (Protected o Precision)
• Codice C/A (Clear Access o Corse Acquisition) • Messaggio di Navigazione D (Navigation Data)
Tali codici consistono in sequenze di cifre binarie (o BIT “0” ed “1”), generate apparentemente in modo aleatorio, ossia senza alcuna logica particolare come nel caso del rumore; in realtà le sequenze sono perfettamente note e sono ripetute ad intervalli regolari di un msec per il codice C/A e di 7 giorni per il codice P.
È per tale motivo che i codici P e C/A sono detti di tipo Pseudo Random Noise (PRN); ogni satellite utilizza la propria sequenza, come meglio chiarito in seguito, che è differenziata da quelle degli altri grazie ad un numero che viene indicato con la sigla PRN.
Codice P (Protected o Precision)
È dato da una sequenza di chip con una frequenza di 10,23 Mbps che si ripete periodicamente dopo circa 38 settimane. Tale sequenza non viene trasmessa da nessun satellite, infatti essa viene suddivisa in segmenti di durata pari a una settimana ed ognuno di essi è assegnato
ad un satellite, per cui nel sistema potrebbero essere impiegati al massimo 38 satelliti (in realtà un segmento non è utilizzato, cinque sono utilizzati dal sistema di controllo e 32 sono assegnati ai satelliti).
Il Codice P modula entrambe le portanti e consente di raggiungere la massima precisione nella determinazione della posizione.
Inizialmente tale codice poteva essere utilizzato soltanto da appositi apparati militari e da utenti autorizzati; tale protezione fu tuttavia aggirata da vari ricercatori fin dall’inizio degli anni ’80, per cui è stata introdotta a bordo dei satelliti operativi la possibilità, su comando, di generare un codice Y criptato, al posto del codice P, utilizzabile soltanto dagli apparati che dispongono degli opportuni decodificatori.
Codice C/A (Clear Access o Corse Acquisition)
Ha una frequenza f0/10= 1,023 Mbps ed un periodo di ripetizione uguale ad un msec; esso
modula soltanto la portante L1 e risulta di più facile ricezione essendo formato da soli 1023 chip. Il suo utilizzo è libero e consente una precisione nettamente inferiore a quella ottenibile con il codice P.
Navigation Data D
Esso contiene il Messaggio di Navigazione, che viene trasmesso a bassa velocità: 50 Bps. Il codice è presente su entrambe le portanti e contiene:
• Le effemeridi del satellite, ossia la posizione esatta per un dato istante ed i parametri utili per il calcolo delle successive posizioni; i dati vengono trasmessi con continuità e vengono aggiornati dal satellite ogni ora.
• L’istante di trasmissione nel messaggio; • Le correzioni per l’orologio di bordo;
• Le correzioni per i ritardi causati dalla rifrazione ionosferica e troposferica; • Varie informazioni sullo stato dei satelliti (il cosiddetto Health);
• L’almanacco, ossia le effemeridi approssimate di tutti gli altri satelliti.
L’intero messaggio (frame) è lungo 1.500 BIT e viene quindi trasmesso in 1.500/50= 30 sec; esso è suddiviso in cinque blocchi di 300 BIT (subframe).
5° blocco: Almanacco (25 pagine) 1° blocco: Correzioni orologio
4° blocco: Messaggio (25 pagine) 2° blocco: Effemeridi 3° blocco: Effemeridi TLM TLM TLM TLM TLM HOW HOW HOW HOW HOW 5 1 2 3 4 6 sec e 300 bit 30 sec e 1500 bit
Fig. 1.4.1 – Struttura del messaggio di navigazione (codice D)
Ogni blocco è trasmesso in 6 sec ed è preceduto da due dati comuni, generati dallo stesso satellite e denominati TLM (TeLeMetry word) e HOW (HandOver Word); tutti gli altri dati sono generati dal sistema di controllo terrestre ed “iniettati” nelle memorie dei satelliti delle stazioni di aggiornamento.
TLM è utilizzato dal sistema di controllo terrestre essenzialmente per verificare il corretto caricamento dei dati durante le fasi aggiornamento, precedentemente descritte.
HOW è un numero progressivo che moltiplicato per 6 fornisce i secondi trascorsi dall’inizio della settimana, ossia fornisce il GPS Time o tempo del sistema.
L’ultimo subframe contiene i dati dell’almanacco, ossia i dati di posizione di tutti i satelliti presenti nel sistema; essi sono una versione ridotta e approssimata dei dati trasmessi da ogni singolo satellite nei subframes precedenti.
L’almanacco consente al ricevitore di determinare velocemente la posizione di tutti i satelliti, e quindi, di sapere quali sono visibili e utilizzabili. Consente, inoltre, di selezionare fra i satelliti utili quali sono quelli meglio disposti da un punto di vista geometrico per avere la massima precisione nel posizionamento.
Fra gli altri dati, ogni “pagina” contiene il codice PRN del satellite cui essa si riferisce ed un indicatore definito space vehicle health, che fornisce all’utilizzatore informazioni preliminari sull’utilizzabilità del satellite prima che il ricevitore tenti di acquisirne i segnali (è tutto regolare se il valore è 0, altrimenti esso può assumere diversi valori ad ognuno dei quali corrisponde un particolare malfunzionamento).
Basandosi su questa struttura del segnale il sistema GPS fornisce un servizio a due livelli: Precise Positioning Service (PPS) per utenti delle forze armate e delle agenzie governative autorizzate, Standard Positioning Service (SPS) per uso civile.
La portante L1 viene modulata con un clock a 10,23 MHz dal codice P e dal codice C/A con
un clock pari a 1,023 MHz. Il codice PRN viene combinato con i dati per la navigazione, emessi a 50 bps, attraverso un’operazione di or esclusivo e il risultato va a modulare la portante L1 in BPSK.
Questo modo di combinare i dati con il codice identificativo del satellite è detto DSSS (Direct Sequence Spread Spectrum). Il segnale S1 assume la forma:
( ) ( )
(
)
( ) ( )
(
)
1 p
cos 2
1 1 C A/sin 2
1 1S
=
A
⋅
P t
⋅
D t
⋅
π
⋅ ⋅ +
f t
φ
+
A
⋅
C t
⋅
D t
⋅
π
⋅ ⋅ +
f t
φ
dove φ è la fase iniziale e 1 D t
( )
= ±1 rappresenta il dato. A1 e AC A/ rappresentano rispettivamentel’ampiezza del codice P e del codice C/A, mentre P t
( )
= ±1 e C t( )
= ±1 sono le rispettive fasi. Il( )
P Y −code⊕data è modulato in fase rispetto a C A code/ − ⊕datasulla portante L1; c’è quindi
uno sfasamento di 90°.
Sulla portante L2 non sono mai presenti simultaneamente i codici P e C/A. In genere la
combinazione P Y( )−code⊕dataè la sola selezionata del segmento di controllo per questa portante; il segnale S2 è:
( ) ( )
(
)
2 p
cos 2
2 2S
=
A
⋅
P t
⋅
D t
⋅
π
⋅ ⋅ +
f
t
φ
I lobi principali per entrambi i segnali hanno un ampiezza di 20,46 MHz. Il segnale GPS è dato dalla somma delle due componenti:
( )
1( )
2( )
GPS
S
t
=
S t
+
S
t
1.4.2 Modulazione dei segnali
Tutti i satelliti utilizzano le stesse frequenze per trasmettere simultaneamente i codici C/A e P e i dati di navigazione. Più precisamente:
• la portante L2 è modulata soltanto dal codice P
Onde evitare interferenze fra i vari segnali, è stata adottata una particolare tecnica di modulazione di fase, comune nei sistemi di comunicazione radio digitali, denominata BPSK (Binary-Phase Shift Keying o scostamento binario della fase).
Tabella I.4.2 – Parametri dei codici di spreading e dei dati di navigazione GPS
Il tipo di modulazione adottato è alquanto complesso poiché sulla stessa frequenza trasmettono contemporaneamente tutti i satelliti senza che essi interferiscano fra di loro. Nei vecchi sistemi di radionavigazione si evitavano le interferenze facendo trasmettere le stazioni terrestri su diverse frequenze oppure in istanti diversi, come nel caso del LORAN e dell’OMEGA.
1.4.3 Degradazione artificiale della precisione
Volendo mantenere la massima precisione soltanto per gli utenti autorizzati e per proteggere gli utilizzatori militari dalla possibilità di essere ingannati da false trasmissioni con segnali simili a quelli del GPS, il DoD (Departement of Defence degli USA) introdusse a bordo dei satelliti del secondo blocco un dispositivo per creare artificialmente una degradazione della precisione con due sistemi denominati Selective Availability e Anti-Spoofing, che possono essere attivati o disattivati dal Centro di Controllo, su richiesta de DoD e senza alcuna preventiva informazione agli utilizzatori.
Tali sistemi causano degli errori noti soltanto agli utenti autorizzati e che comunque non producono, per gli altri utenti, errori superiori ai 100 m. L’utilizzo del GPS differenziale ha comunque consentito di aggirare nuovamente anche queste ultime protezioni, per cui si presume che in futuro il GPS perderà il suo carattere militare per diventare un sistema interamente libero.
Anti-Spoofing (AS)
L’Anti-Spoofing (AS) o “Anti-Imbroglio” agisce direttamente sul codice P e su entrambe le portanti L1 e L2 e consiste nell’introduzione, al posto del codice P, di un nuovo codice criptato
denominato codice Y. Tale limitazione ha effetto soltanto sugli utenti, civili o militari, autorizzati a servirsi del codice P, che dovranno munirsi di un nuovo ricevitore o dovranno sostituire i programmi di decifrazione del codice P con quelli del codice Y.
Selective Availability (SA)
La Selective Availability (SA) o “Disponibilità selettiva” consiste nell’introduzione di appositi errori sulle Effemeridi dei satelliti da parte dalla Stazione di controllo terrestre e soltanto gli utenti autorizzati sono in grado di prevederne, istante dopo istante, i valori e quindi eliminarne le conseguenze.
Complessivamente la SA produce un’oscillazione della posizione indicata del ricevitore di circa 100 m in un periodo variabile da 3-4 min a 60 min.
Dal 2 Maggio 2000, il disturbo SA, è stato rimosso; come conseguenza si è avuto un incremento dell’utilizzo del GPS per applicazioni civili, ad esempio sistemi di guida satellitari per auto.
1.4.4 Posizione e istante di trasmissione dei satelliti
La determinazione della posizione richiede normalmente quattro misure di distanze e, quindi, l’osservazione simultanea di un eguale numero di satelliti; se è nota la quota del ricevitore sono sufficienti tre misure. Per potere effettuare i calcoli è necessario conoscere la posizione dei satelliti nell’istante della misura e l’istante in cui trasmettono.
Queste informazioni sono derivate da alcuni dati trasmessi al ricevitore proprio tramite i segnali di ranging. Naturalmente il satellite non può comunicare istante per istante la sua posizione poiché si muove lungo la sua orbita a velocità dell’ordine dei Km/s; ciò che comunica, invece, è un insieme sintetico di parametri detti effemeridi che permette il calcolo della sua posizione. Se si considerasse la terra perfettamente sferica ed omogenea e si trascurasse l’azione di forze esterne, qualunque satellite artificiale si muoverebbe lungo orbite ellittiche predicabili nel tempo (leggi di Keplero).
In realtà a causa della presenza di numerose forze perturbative quali la disomogeneità della Terra, l’attrazione gravitazionale lunare, quella solare e la pressione di radiazione, l’equazione del moto si complica e l’orbita non risulta facilmente prevedibile. Il problema è risolto fornendo i valori esatti dei parametri ad un certo istante, detto epoca, insieme al loro intervallo di validità e ad una caratterizzazione di come variano.
Le effemeridi sono calcolate dai centri deputati del segmento terrestre di controllo a partire dai dati raccolti dalle stazioni di monitoraggio e, quindi, periodicamente trasmesse dalle stazioni di uplink ad ogni satellite all’interno dei rispettivi messaggi di navigazione. Nel sistema GPS, ad esempio, le monitor stations ricevono in maniera continua i segnali emessi dai satelliti in vista e inviano tutti i dati raccolti alla Master Control Station di Colorado Springs, che esegue per ciascun satellite una stima quotidiana dell’orbita nelle 24 ore successive; le orbite vengono parametrizzate e i dati inviati ai satelliti i quali li trasmetteranno agli utenti durante la giornata successiva in blocchi che hanno una validità di 4 o 6 ore.
Nell’ambito del sistema GPS si individuano tre scale temporali fondamentali: il cosiddetto tempo GPS (scala caratteristica del sistema), il tempo al satellite ed il tempo al ricevitore.
Essere in grado di mettere in relazione questi tre diversi riferimenti vuol dire conoscere l’intervallo temporale (OFFSET) che questi presentano rispetto ad un istante di riferimento (ad es. l’epoca corrispondente ad una osservazione).
In genere la scala GPS viene presa come scala di riferimento; attualmente viene sincronizzata con il riferimento UTC (Coordinated Universal Time), determinato presso l’Osservatorio Navale degli Stati Uniti.
Gli oscillatori che generano il segnale a bordo del satellite sono del tipo atomico al Cesio e al Rubidio, che garantiscono un’elevata stabilità della sincronizzazione del segnale con la scala UTC.
1.5 Principi di funzionamento dei sistemi di posizionamento satellitare
Nei due paragrafi che seguono daremo una descrizione generale dei principi di funzionamento di un generico sistema di posizionamento satellitare. Per rendere più chiara l’esposizione, ove necessario, sarà portato a titolo di esempio il sistema GPS. I concetti di base sono da ritenersi validi anche per gli altri sistemi di navigazione, compreso il futuro sistema europeo GALILEO.
1.5.1 Determinazione della posizione
La tecnica adottata nei sistemi di posizionamento satellitare, per individuare la posizione di un generico obiettivo, si basa sulla misura del tempo di percorrenza del segnale prodotto da uno dei satelliti della costellazione fino all’antenna del ricevitore a terra. Questo intervallo di tempo viene quindi moltiplicato per la velocità di propagazione del segnale, in modo da ottenere la distanza satellite-ricevitore. Applicando questa tecnica ai segnali trasmessi da più satelliti, il ricevitore può ricavare le proprie coordinate spaziali.
La misura di distanza così determinata è affetta però da diversi errori, dovuti agli effetti atmosferici sulla velocità di propagazione del segnale, alle imprecisioni dei segnali di clock dei satelliti ed altri effetti secondari. Per tale ragione la distanza misurata viene chiamata nel gergo GPS pseudodistanza o pseudorange.
Ciascun satellite, con modalità che saranno descritte successivamente, trasmette con continuità degli opportuni segnali codificati, che contengono diverse informazioni, quali, in particolare, i dati orbitali per il calcolo della posizione del satellite ed un segnale di tempo per la determinazione degli istanti di partenza dei suddetti segnali. I ricevitori terrestri, mediante un proprio orologio interno, misurano la differenza fra l’istante di ricezione e l’istante di trasmissione del segnale; moltiplicando tale differenza per la velocità di propagazione delle onde elettromagnetiche si ottiene la distanza fra il satellite ed il ricevitore.
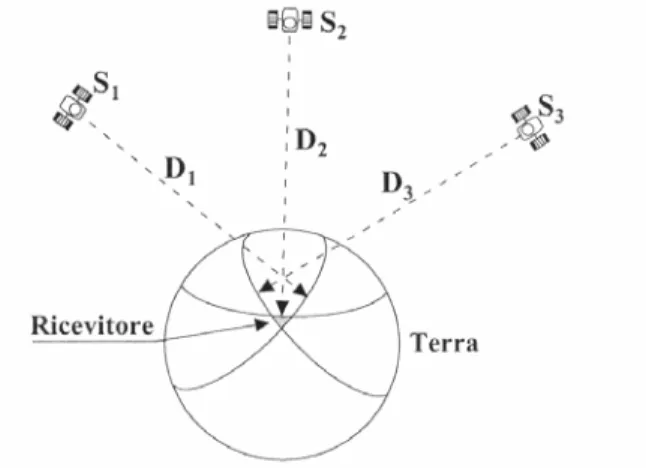
Il luogo di posizione così definito è una sfera con il centro nella posizione occupata dal satellite nell’istante di emissione del segnale ed il raggio pari alla distanza calcolata; tale luogo interseca la superficie terrestre formando una circonferenza che è il luogo dei punti in cui si trova l’utilizzatore terrestre.
Con due misure di distanza, e quindi utilizzando due satelliti, si individuano due circonferenze che si intersecano in due punti di cui uno è la posizione dell’osservatore; l’ambiguità fra i due punti può essere eliminata con la posizione stimata del ricevitore.
Fig. 1.5.1.2 – Determinazione della posizione terrestre con tre misure di distanza
Considerando come incognita anche la quota (ad esempio nel caso della navigazione aerea), diventano necessarie tre osservazioni che individuano tre sfere, la cui intersezione individua un volume entro il quale si trova il ricevitore. Nel caso bidimensionale, ossia nel caso in cui la quota è nota, le tre misure individuano un triangolo, praticamente piano, la cui area è funzione degli errori di misura e della distribuzione in azimut dei satelliti. Si può osservare che un errore di appena 0,1 msec nella misura degli intervalli di tempo equivale ad un errore di 8 3
3 10 ∗0,1 10∗ − =300 Km nella misura delle distanze. È fondamentale disporre quindi di orologi di grande precisione nell’ambito di tutto il sistema, per cui i satelliti sono dotati di orologi atomici che sono costantemente controllati dal centro di controllo situato negli USA a Colorado Spring.
Per limitare i costi degli apparati riceventi terrestri, gli orologi in essi installati non devono necessariamente avere una grande precisione, essendo possibile determinare costantemente il loro errore rispetto al simultaneo tempo fornito dai satelliti. L’errore dell’orologio rappresenta pertanto un’ulteriore incognita che può essere determinata con una quarta osservazione; si risolve in definitiva un sistema di quattro equazioni con le quattro incognite: latitudine, longitudine, quota ed errore dell’orologio.
1.5.2 Misura dei ritardi per il calcolo dello pseudorange
Abbiamo già detto che la tecnica di multiplazione di canale usata è la CDMA. Tale tecnica richiede che il ricevitore GPS sia capace di sintetizzare una replica del codice PRN (unico per ogni satellite) trasmesso da ogni satellite e di variarne la fase in modo da correlarlo con quello ricevuto.
Ogni codice PRN usato, deve essere cross-correlato al minimo con ogni altro codice per ogni sfasamento possibile all’interno dell’intero periodo del codice.
Fig. 1.5.2.1 – Misura del tempo di transito del segnale di ranging trasmesso dal satellite
Il tempo di trasmissione del segnale è misurato, quindi, correlando i codici PRN, generati dal satellite, con quelli generati internamente dal ricevitore. I segnali del ricevitore sono ricavati dal clock del ricevitore, mentre quelli dei satelliti dal clock dei satelliti.
Il ricevitore è dotato di un generatore di codice PRN analogo a quello in dotazione dei satelliti e come essi, dovrebbe essere sincronizzato con il GPS Time, tuttavia tale sincronismo non è perfetto, essendo utilizzati nei ricevitori degli orologi con normali oscillatori al quarzo che hanno una deriva di cui occorre tenere conto nella misura dei tempi.
I due segnali, quello proveniente dal satellite e quello generato internamente al ricevitore, vengono confrontati con una tecnica detta di autocorrelazione dei segnali; il dispositivo elettronico che attua tale confronto è chiamato correlatore e dà in uscita un segnale V(τ) che è funzione dello sfasamento fra i due segnali in ingresso. Più precisamente V(τ ) assume il valore massimo con i due segnali perfettamente allineati ed un valore nullo o molto piccolo nel caso di segnali sfasati fra di loro. Come si vede dalla figura 1.5.2.2, la tensione in uscita dal correlatore comanda il dispositivo che genera il ritardo stesso in modo da ottenere automaticamente il massimo di V(τ). Tale configurazione ad anello del circuito consente il continuo inseguimento (o “tracking”) del segnale; dopo la fase di aggancio (o “lock on”), segnalato dal massimo di V(τ ), qualsiasi variazione di distanza prodotta dal moto relativo fra satellite e ricevitore produce uno sfasamento nei codici di ingresso al correlatore che viene annullato immediatamente dal circuito ad anello. In tal modo la misura del ritardo, e quindi della distanza, è continua. I ritardi temporali misurati rappresentano lo sfasamento che il ricevitore deve introdurre nel proprio generatore di codice per ottenere un perfetto sincronismo con i codici provenienti dai satelliti, tali ritardi sarebbero corretti se tutti gli orologi (dei satelliti e del ricevitore) fossero in perfetto sincronismo, in realtà ciò non avviene per cui è necessario sommare agli PseudoTime (i tempi misurati) gli errori negli orologi dei satelliti e del ricevitore. I primi sono determinati dalle stazioni di controllo terrestre e fanno parte del messaggio di navigazione, i secondi vanno determinati analiticamente considerandoli un incognita del sistema.
1.6 Fonti d’errore
Il sistema GPS è soggetto a differenti tipi di errori che influiscono sulla distanza misurata, molti di essi possono essere ridotti di ampiezza utilizzando delle formule ottenute dopo un’attenta valutazione delle cause e dopo una serie di misure effettuate, in particolare durante la fase sperimentale del sistema. Fondamentalmente essi sono:
• errori dipendenti dai satelliti, fra cui anche la Selective Availability a l’Anti Spoofing • errori dipendenti dal ricevitore
• errori prodotti dalle riflessioni multiple e dalla propagazione dei segnali nella ionosfera e nella troposfere
• errori introdotti dal Sistema di Controllo terrestre nella determinazione delle orbite, nelle correzioni degli orologi e cosi via.
tecniche differenziali del DGPS (Differential GPS). Altri errori (rumore del ricevitore e multipath) sono invece dipendenti dal singolo utilizzatore e quindi non possono essere eliminati con le tecniche menzionate.
I suddetti errori rendono incerti i luoghi di posizione individuati e quindi la posizione finale del ricevitore come in qualsiasi altro sistema di posizionamento usato nella navigazione. L’errore sulla posizione dipende, oltre che dagli errori nelle misure, da un fattore scalare legato alla geometria del sistema, ossia alla distribuzione in azimut ed in altezza dei satelliti utilizzati nelle misure; tale fattore è denominato Fattore d’espansione dell’errore o PDOP (Position Dilution Of Precision) per cui si può scrivere:
Err. sulla posizione = Err. sulla distanza
⋅
PDOPDi seguito è riportata molto sinteticamente un’analisi dei principali tipi di errori.
1.6.1 Errori dei satelliti
Tali errori sono già stati descritti, in gran parte, nei paragrafi precedenti:
• La SA e l’AS che sono generate dai satelliti su comando del Sistema di Controllo Terrestre per degradare la precisione del sistema.
• Gli errori sugli orologi atomici di bordo.
• Gli errori prodotti dalla non perfetta conoscenza dei parametri orbitali dei satelliti.
1.6.2 Errori nella propagazione dei segnali nella ionosfera e nella troposfera
Il segnale GPS attraversando l’atmosfera può subire un rallentamento, con un effetto simile alla luce che si rifrange attraverso un blocco di vetro.
Tale rallentamento può introdurre un elemento di errore nel calcolo della posizione a Terra in quanto la velocità del segnale viene alterata (la velocità della luce infatti è costante solo nel vuoto).
La ionosfera non causa un ritardo costante del segnale, ma esistono vari fattori che contribuiscono ad influenzarne l’effetto.
a. Elevazione del satellite. I segnali dei satelliti con bassa elevazione sono maggiormente soggetti a variazioni, rispetto ai satelliti con maggiore elevazione. Ciò è dovuto alla maggiore distanza percorsa dal segnale attraverso l’atmosfera.
b. La densità della ionosfera subisce l’influenza del Sole, diminuendo durante la notte e aumentando durante il giorno e causando come effetto il rallentamento del segnale. L’entità dell’incremento della densità ionosferica varia a seconda dei cicli solari (attività delle macchie solari). Il picco dell’attività delle macchie solari si verifica ogni 11 anni circa. Oltre a questo possono verificarsi brillamenti solari casuali che influiscono sulla attività della ionosfera. Gli effetti negativi sono controllabili mediante due metodi:
1. Il primo metodo richiede il calcolo di un valore medio della riduzione della velocità della luce causato dalla ionosfera. Tale fattore di correzione può essere quindi applicato ai calcoli del rilievo GPS eseguito. Tuttavia si tratta di una media e quindi non di una condizione costantemente valida. Questo metodo quindi non fornisce una soluzione ottimale per la riduzione degli errori ionosferici.
2. Il secondo metodo richiede l’uso di ricevitori GPS a doppia frequenza. Tali ricevitori misurano le frequenze L1 e L2 del segnale GPS. È noto che, quando un segnale radio
viaggia attraverso la ionosfera, viene rallentato in misura inversamente proporzionale alla propria frequenza. Se si confrontano quindi i tempi di arrivo dei due segnali a diversa frequenza, è possibile avere una stima molto accurata del ritardo.
c. Anche il vapore acqueo contenuto nell’atmosfera (in particolare nella Troposfera) influisce sul percorso del segnale GPS. Tale effetto, che può dare luogo alla degradazione della posizione calcolata, è riducibile mediante l’utilizzo dei modelli atmosferici.
1.6.3 Errori prodotti da percorsi multipli
Il Multipath del segnale GPS si verifica quando l’antenna del ricevitore è posizionata vicino ad un’ampia superficie riflettente, quale per esempio un lago e un edificio.
Il segnale del satellite non si dirige direttamente sull’antenna, bensì colpisce l’oggetto vicino e viene riflesso sull’antenna, dando luogo quindi ad una falsa misurazione.
Gli effetti del Multipath possono essere ridotti utilizzando delle speciali antenne GPS che incorporano un “round plane” (un disco metallico di circa 50m di diametro), che impedisce all’antenna la ricezione di segnali provenienti dal basso. Le antenne GPS dell’ultima generazione sono in grado di filtrare il segnale che ha subito un Multipath anche se la massima accuratezza è ottenibile utilizzando un’antenna di tipo choke ring. Questo tipo di antenna è infatti dotata di 4 o 6 anelli concentrici che “intrappolano” i segnali indiretti. Il Multipath influisce solamente sulle misure di precisione, del tipo richiesto dai rilievi topografici. I semplici ricevitori portatili per navigazione non utilizzano tecniche di filtro per i segnali riflessi.
1.6.4. Errori del ricevitore
Ogni ricevitore genera degli errori legati al rumore interno, alla precisione con cui lavora il correlatore, ai ritardi sia dai vari dispositivi elettronici che dal software che effettua l’elaborazione dei dati. Gli effetti di tali errori possono essere consistenti, nel caso di ricevitori utilizzati su veicoli molti veloci; una progettazione accurata del ricevitore, in rapporto all’uso cui è destinato, può pertanto renderli molto piccoli.
1.6.5 Diluizione della precisione
La Diluizione della Precisione (DOP) è il parametro di valutazione della disposizione dei satelliti e si riferisce alla distanza e alla posizione dei satelliti nel cielo.
Fig. 1.6.5 – Indebolimento della precisione: (a) geometria con DOP bassa, (b) geometria con DOP elevata
Il parametro DOP può amplificare l’effetto degli errori di rilevamento dei satelliti. I diagrammi riportati nella figura 1.6.5 illustrano più chiaramente questo principio.
Gli errori descritti in precedenza influiscono sul campo d’azione dei satelliti. Quando i satelliti sono correttamente distanziati la posizione è individuabile nell’ambito dell’area in ombra del diagramma e il margine di errore possibile è ridotto.
Quando i satelliti sono eccessivamente ravvicinati le dimensioni dell’area in ombra aumentano e aumenta di conseguenza anche l’incertezza della posizione. I diversi tipi di Diluizione della Precisione sono calcolabili in base alle dimensioni.
VDOP – Diluizione verticale della precisione in verticale. Indice della degradazione dell’accuratezza nella direzione verticale.
HDOP – Diluizione della precisione in orizzontale. Indice della degradazione dell’accuratezza nella direzione orizzontale.
PDOP – Diluizione delle precisione della posizione. Indice della degradazione della posizione in senso tridimensionale.
GDOP – Diluizione della precisione geometrica. Indice della degradazione della posizione in senso tridimensionale e del tempo.
Il miglior modo per ridurre al minimo gli effetti del GDOP consiste nell’osservare il maggior numero possibile di satelliti.
È opportuno, tuttavia, rammentare che i segnali emessi dai satelliti a bassa elevazione sono in genere più soggetti all’influenza di gran parte delle fonti di errore.
Come indicazione generale, quando si eseguono rilevamenti con il sistema GPS, è meglio osservare i satelliti che si trovano a 15° sopra l’orizzonte. Le posizioni più accurate si ottengono in genere quanto il valore di GDOP è basso (solitamente inferiore a 8).