Chapter
7
Guidelines for future work
In this chapter, an integrated maritime surveillance (IMS) system having WERA as its core is briefly described. IMS is developed with the final aim of providing providing low cost, 24-hour, real time, over the horizon surveillance of large ocean areas, out to the 200 nautical mile Exclusive Economic Zone (EEZ). The system can be used to coordinate search and rescue operations, and to combat smuggling, drug trafficking, illegal dumping of pollutants, and other undesirable activities. The major challenges in using HFSW radars are operating within the crowded HF spectrum, and maintaining effective operation in high environmental noise, ocean clutter, ionospheric clutter and other undesirable sources of interferences. Continuous monitoring of the maritime national borders takes on great significance, both in terms of ship and aircraft surveillance. The broad range of requirements for maritime surveillance is intended for supporting the protection and exercise of national sovereignty, not only in terms of law enforcement but also in terms of search and rescue, environmental protection and resource management.
Throughout the years the NATO Undersea Research Centre (NURC) has acquired great experience in multi-sensor tracking and fusion technology in undersea environments. Because of the rapid changes in the political assets, NATO member countries drive for finding and developing new solutions for surveillance, with a particular interest in the maritime domain. For this reason NURC is investing significant efforts also in intelligent systems for surface monitoring [Car07]. Recently, great attention has been paid on low-power HFSW radars, such as WERA, which are typically exploited for remote sensing applications.
While the over-the-horizon capability of HFSW radars makes it the key sensor, it is only one component in the overall IMS system. Nevertheless, other sensors are essential for generating and updating the IMS picture. Operating cost is a significant factor in the deployment of patrol vessels and aircraft. However, this small additional investment means that the ship and aircraft can now be cued from the radar track display for a very substantial increase in operational efficiency. Microwave radars operate by line-of-sight propagation from the transmitting antenna. Because of this limitation, microwave radars cannot detect surface targets beyond the horizon. Maximum range is therefore determined by the height above sea level of the shore based radar antenna. For this reason, microwave radars is generally restricted to detecting and tracking in-shore traffic, ships entering and leaving harbors.
Chapter 7 - Guidelines for future work
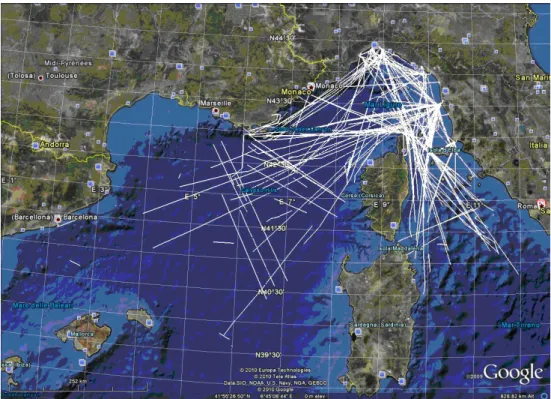
It is a reasonable assumption that the majority of targets in the EEZ will be cooperative. Some cooperative targets are equipped with one or more of the transponder based position-reporting systems. One such shipboard transponder system is the automatic identification system (AIS), as established by the International Maritime Organization (IMO). In the AIS system, a VHF transponder repeatedly broadcasts the ship name, position and other details for automatic display on nearby ships equipped with AIS. While this allows ships to be aware and keep track of other ships in their immediate vicinity, coastal states will also be able to receive, plot and log the data once AIS base stations (BS) and repeaters are installed and operating. Operating range from shore is expected to be between 50 and 100 nautical miles, depending on the capability and coverage of the installed base stations. This means that for the first 50 to 100 nautical miles, the positions and tracks of all AIS equipped ships in the EEZ could be displayed as part of an EEZ surveillance system, as shown in Fig. 7.1.
Figure 7.1: Example of AIS cooperative vessel tracks in the Tyrrhenian Sea recorded in 24 hours on May 7, 2009.
While most targets will be cooperative, a smaller but still significant number is expected to be non cooperative, or too small to carry on an AIS system. Under this banner we could have illegal immigration, smuggling, drug trafficking, piracy, illegal dumping of pollutants. AIS for example, can be set up to provide a display of all AIS equipped ships in the immediate vicinity without disclosing the position of the uncooperative target itself. Under many aspects these targets represent the real challenge in developing an effective and affordable maritime surveillance system. In surveillance systems, detection is the first step to deal with, while target classification closely follows. In this sense, AIS tracks work as ground truth data for
separating cooperative and uncooperative targets [Tet05]. AIS plots provide a significant benefit for an operator to de-emphasize the known tracks and thereby focus on the unknown and potentially more threatening ones. This, of course, implies there are tracks for the unknown targets. In this perspective, the performances of the HF detection capabilities should be investigated intensively. A first distinction between cooperative and uncooperative targets is provided by comparing the HF detection plot against the AIS data and verifying which of the tracks is originated by cooperative or uncooperative ships. Uncooperative targets can be also small fast going boats or immigrant boats which can need help because in great danger. Such events should be avoided.
The combined use of long term AIS plots provided by cooperative targets has the double purpose of evaluating the performances of such detection algorithms and then discriminating uncooperative targets and possible threats. In this sense, some preliminary results are discussed in [Mar10a], [Mar10b].
Chapter 7 - Guidelines for future work