Cap.5
Analisi dei
Risultati delle
5 – 1
Verifica dei diversi Sistemi di Controllo
In un primo momento si è deciso di alimentare la macchina con il sistema descritto in figura 4.10, per verificare che il sistema di controllo descritto al paragrafo 3-2 è più performante di quello basato sull’approssimazione sinusoidale (descritto al paragrafo 2-3).
Per confrontare i diversi sistemi di controllo, si è fatto ricorso al sistema di alimentazione descritto in figura 4.9, e si è imposto quale riferimento di velocità una velocità costante e pari a 135 rad/s, così da far funzionare la macchina nel funzionamento a minima corrente.
Le condizioni iniziali delle variabili di stato, nel modello in variabili AB di figura 4.1, sono state stabilite in
• Ω0=135 rad/s
• I0=0, per ogni fase
• γ0=0
Mentre il carico meccanico associato alla macchina è stato impostato costante e pari alla coppia massima producibile (8.25 Nm), con un momento d’inerzia pari al doppio di quello del motore, così da avere un momento equivalente pari a Jeq=3JM.
Effettuando le simulazioni imponendo prima le correnti di riferimento ricavate dall’approssimazione sinusoidale, e successivamente quelle ottenute a partire dai parametri effettivi, si può effettuare un confronto tra i profili di corrente ottenuti nelle due diverse situazioni: si vede, in particolare, come una volta terminato il transitorio di avviamento le correnti fornite dal controllo sinusoidale siano, seppur di poco, superiori a quelle impresse dal controllo apposito, come mostra la figura 5.1. La differenza, come si può osservare, non è molta, ma in ogni momento della simulazione si mantiene costantemente pari a circa 0.1 A, dunque un errore relativo pari a circa il 2% e che parrebbe quindi trascurabile. Al tempo stesso, però, questa lieve differenza fa sì che in caso di controllo sinusoidale il sistema di alimentazione (riportato in figura 4.9) imponga una tensione di alimentazione superiore a quella massima ipotizzata per la macchina, arrivando a toccare i 270 V di picco. Questa situazione ha conseguenze sulle capacità operative della macchina, perché quando la si alimenta con quella che è effettivamente la sua tensione massima di alimentazione, 245 V, si ha una riduzione della coppia massima realmente producibile.
In definitiva, utilizzando un sistema di controllo basato sul set di parametri ricavati dall’approssimazione sinusoidale, si ha una sovrastima delle effettive capacità della macchina, come evidente dal confronto delle due curve di capability nella figura 5.2.
Figura 5.1 – Correnti di riferimento calcolate attraverso i due set di parametri
Figura 5.2 – Curve di capability dei due diversi sitemi di controllo
Le piccole differenze nelle Irif imposte dai due sistemi non producono però un comportamento
dinamico molto diverso, dunque si riporteranno successivamente solo i profili di coppia e di velocità relativi al controllo realizzato ad hoc.
(a)
(b)
Figura 5.3 – Coppia di riferimento ed effettiva
Dal particolare riportato in figura 5.3(b) si osserva come la coppia elettromagnetica prodotta abbia un’oscillazione di ampiezza circa 0.5 A, e come il valor medio della We, pari a circa 8.16 Nm, sia
inferiore alla Wrif.
Osservando meglio, si nota che l’ondulazione di coppia ha un periodo pari a circa 1/6 di quello delle correnti (il cui andamento temporale è riportato in figura 5.4): questa ciclicità corrisponde a quelle componenti armoniche (di flusso e d’induttanza) effettivamente presenti nel modello ma trascurate
al momento dell’elaborazione del sistema di controllo, componenti che, nel riferimento di Park, avevano proprio periodicità 6pγ. L’ampiezza dell’ondulazione è pari a circa il 6% del valor medio di We, e dunque si possono comunque ritenere in prima battuta accettabili le semplificazioni fatte al paragrafo 3-2.
(a)
(b)
A fronte della coppia elettromagnetica prodotta riportata nella figura 5.3, l’andamento temporale della velocità angolare della macchina è quello riportato nella figura successiva:
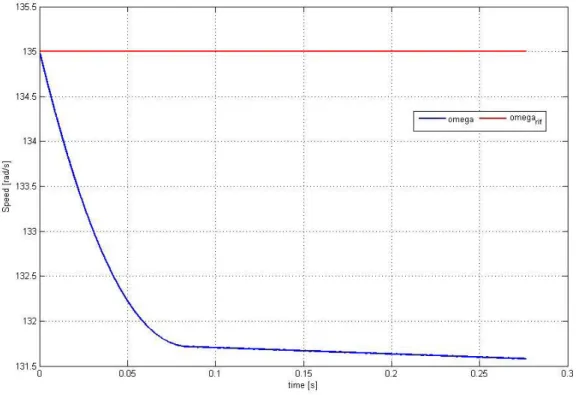
Figura 5.5 – Velocità di riferimento ed istantanea
Come si può notare, dopo un brusco rallentamento, dovuto al transitorio iniziale in cui la macchina non produce una sufficiente coppia elettromeccanica, la decelerazione diminuisce ma non si arresta del tutto, continuando la velocità a diminuire poiché il valor medio della We è in realtà minore della
CN prevista per la macchina, pari al carico applicato.
Controllo trapezoidale
La strategia di controllo trapezoidale si applica in genere a macchine isotrope e dunque, essendo il modello da noi implementato relativo ad una macchina fortemente anisotropa, sarà logico attendersi prestazioni non particolarmente brillanti da questo tipo di controllo.
Utilizzando il sistema di controllo descritto in figura 4.7, ed alimentando il motore per mezzo del generatore proporzionale integrale che impone le correnti, con le stesse condizioni iniziali per quanto concerne le variabili di stato e lo stesso carico meccanico applicato, le correnti imposte dal sistema di controllo sono riportate in figura 5.6, nella quale, per maggior comprensione, si mostrano soltanto i risultati degli ultimi 0,1 secondi di simulazione, comunque rappresentativi dell’intero
periodo, eccezion fatta per i primissimi istanti di transitorio, in cui le correnti crescono fino a raggiungere il valore di regime.
Figura 5.6 – Correnti di riferimento con controllo trapezoidale
Osservando la figura precedente, il sistema trapezoidale sembrerebbe avere prestazioni pari a quelle degli altri tipi di controllo, con correnti equivalenti (il valore efficace delle correnti nominali viste nei casi precedenti è infatti molto vicino al valor massimo di questo tipo di controllo), ma il fatto che la forma d’onda delle tensioni mozionali in realtà non sia trapezoidale comporta un notevole errore sulla coppia elettromagnetica effettivamente prodotta:
Figura 5.8 – Coppia di riferimento e effettiva con controllo trapezoidale
anche le figure 5.7 e 5.8 mostrano soltanto la situazione di regime, ma ciò è sufficiente per constatare come la coppia media sia sensibilmente inferiore a quella richiesta, e come sia inoltre presente un forte ripple nella coppia effettiva: tale oscillazione, dovuta principalmente alle commutazioni di corrente che inducono forti variazioni nelle tensioni mozionali, non può essere tollerata, perché causa di forti stress meccanici sul motore e sul carico ad esso associato, che potrebbero andare incontro a rotture per fatica.
Riassumendo, si può affermare che il controllo della macchina in esame fatto con tecnica trapezoidale non fornisce le prestazioni richieste, risultato prevedibile dal momento che tale tipo di controllo si applica in genere a motori isotropi, mentre l’oggetto dello studio presenta una forte anisotropia.
La tecnica di controllo sinusoidale, invece, produce risultati notevolmente migliori rispetto a quella precedente, ma porta ad una sovrastima delle reali potenzialità della macchina in ciascuna condizione di lavoro, inducendo così il sistema di controllo a chiedere al motore prestazioni che in realtà non è in grado di erogare.
Il controllo realizzato appositamente, infine, per quanto poco distante dalla tecnica sinusoidale è servito per evidenziare i limiti di quest’ultima, appena esposti, e consente dunque un più razionale sfruttamento del motore.
Per migliorare ulteriormente le capacità di controllo della macchina si può pensare di implementare un sistema di controllo che tenga conto anche degli effetti delle armoniche superiori di flusso a vuoto e induttanza, rinunciando però alla proprietà di costanza delle correnti di riferimento espresse nella base di Park, in condizioni di regime.
5 – 2
Controllo del Moto
Una volta verificato che l’utilizzo dei riferimenti di corrente ricavati dai parametri effettivi di macchina rappresenta il miglior sistema di controllo della macchina, si è proceduto ad effettuare ulteriori simulazioni, variando il riferimento di velocità in ingresso al sistema di controllo.
Per far ciò, si è provveduto a far raggiungere alla macchina la situazione di regime quando sottoposta alle seguenti condizioni di funzionamento:
• WL = 3 Nm, costante;
• Jeq = 3 JM;
• Ωrif = 135 rad/s.
Gradino di Velocità
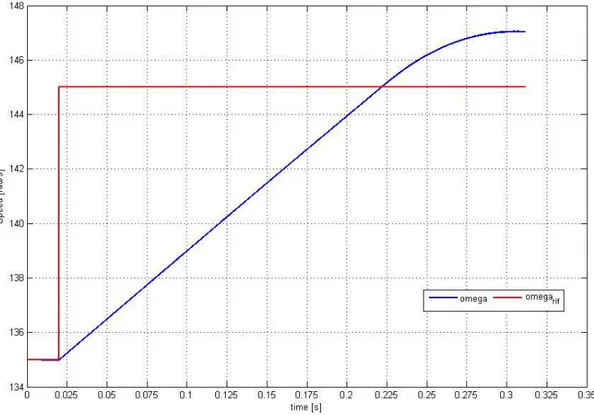
Una volta fatta arrivare la macchina alle condizioni di regime viste precedentemente, il riferimento di velocità è stato variato bruscamente, fissandolo in 145 rad/s così da analizzare il comportamento della macchina in condizioni di sovravelocità.
Il profilo di velocità assunto dalla macchina è riportato in figura
Come si vede la macchina, per effetto della componente proporzionale del regolatore, reagisce prontamente all’errore di velocità, iniziando una accelerazione per ridurre tale errore; il profilo della coppia elettromagnetica prodotta in questa situazione è il seguente:
Figura 5.10 – Profilo di coppia nel caso di variazione a gradino del riferimento di velocità
e si vede come nella fase di piena accelerazione la macchina tenda a produrre la massima coppia possibile, riducendo poi (giustamente) il Wrench elettromeccanico una volta oltrepassata la velocità di riferimento, per l’effetto combinato della componente proporzionale di Wrif (negativa perché ci si trova in condizioni di errore negativo) e integrale (ancora positiva ma con derivata negativa). Effettuando un ingrandimento del comportamento della coppia prodotta, è possibile notare come all’istante t=0.125 s (cioè circa in corrispondenza del superamento della velocità base) il riferimento di coppia cominci a diminuire lentamente (e con esso dunque la coppia media prodotta all’asse), per effetto del blocco di limitazione di coppia in sovravelocità visto in figura 4.8 e che implementa la curva di capability riportata in figura 5.2
Figura 5.21 – Profilo di coppia nel caso di variazione a gradino del riferimento di velocità, ingrandimento
Il profilo delle correnti circolanti negli avvolgimenti di macchina rispecchia quello della coppia, come mostrato di seguito, dove si vede come le correnti anche in corrispondenza della massima produzione di coppia non superino il limite dei 5 A di picco, come richiesto in fase di elaborazione del sistema di controllo.
Rampa di Velocità
Un’altra simulazione è stata condotta applicando alla macchina, una volta raggiunte le condizioni di regime, un riferimento di velocità costituito da una rampa di pendenza 1/0.1, cioè in grado di aumentare il riferimento di velocità di 1 rad/s ogni 10 centesimi di secondo.
Il profilo di velocità assunto dalla macchina in tale condizione è riportato di seguito
Figura 5.43 – Profilo di velocità nel caso di variazione a rampa del riferimento
Dalla figura si intuisce come nei primi istanti, per effetto del ridotto errore di velocità, la parte proporzionale del regolatore di velocità fornisca un riferimento di coppia piccolo, mentre quella integrale nei primi istanti è praticamente nulla per effetto del naturale ritardo d’intervento: queste considerazioni sono deducibili dal fatto che la velocità effettiva, nei primi istanti dopo la variazione del riferimento di Ω, resti praticamente invariata.
La veridicità di queste considerazioni è poi confermata dall’andamento temporale della coppia di riferimento e di quella effettiva, come riportato in figura 5.14, che mostra appunto come l’aumento della Wrif sia modesto rispetto alla richiesta di coppia nella situazione di regime precedente la
Figura 5.54 – Profilo di coppia nel caso di variazione a rampa del riferimento di velocità
5 – 3
Osservazioni Finali
Come è possibile notare dai risultati riportati, nessuna simulazione ha raggiunto la condizione di regime: questa mancanza è da imputarsi ad un bug presente nel tool di calcolo simbolico implementato in MATLAB, tool utilizzato in questo lavoro per il calcolo della matrice delle induttanze e dei vettori flusso a vuoto e tensione mozionale a vuoto (questi calcoli sono riportati al paragrafo 3-1), e che in ambiente Simulink provvede a sostituire la variabile simbolica γ di dette funzioni con l’effettivo valore istantaneo da essa assunto.
Il programma non riesce infatti ad operare perfettamente tale sostituzione, in quanto apparentemente la routine cerca di esprimere i numeri che manipola sotto forma razionale, e va incontro ad errore quando uno dei risultati della sostituzione deve essere espresso utilizzando un numero di cifre superiore a quelle gestibili dal programma.