Appendice F Risultati dell’identificazione con modello energetico
Appendice F Risultati dell’identificazione con
modello energetico con momento sul
tamburo nullo
In questa appendice vengono illustrati alcuni risultati, ottenuti mediate il modello energetico identificando i parametri Kµsx, C e 0 C1, ed usando i valori originali degli altri parametri. Le identificazioni riguardano sia il sistema ruota-tamburo (paragrafo F.1) che il sistema costituito dalla sola ruota (paragrafo F.2). Oltre agli andamenti dei parametri da identificare, durante l’evoluzione del ciclo iterativo di identificazione, vengono riportati gli andamenti, nel tempo, di alcune grandezze fondamentali, ottenuti mediante simulazione condotta utilizzando i valori ottimizzati dei parametri stessi.
F.1 Simulazioni del sistema ruota-tamburo mediante l’uso dei
parametri identificati
In questo paragrafo sono riportati risultati di simulazioni del sistema ruota-tamburo, condotte mediante il modello QSTM_08 ed utilizzando i valori di Kµsx , C e 0 C1
identificati nel lungo periodo, mediante un peso α paria a 0.95 e 0.5, per i tre test in esame. Dette simulazioni permettono di determinare gli andamenti temporali del coefficiente di attrito µb e dello scorrimento sx, nonché la loro dipendenza reciproca, utili per poter valutare l’evoluzione dinamica del sistema. Vengono inoltre riportati i grafici relativi agli andamenti temporali del braccio x della risultante della distribuzione di pressione e delle sue componenti xroll e x , della forza longitudinale F e delle sue componenti b Froll e F , in b
Appendice F Risultati dell’identificazione con modello energetico modo tale da comprendere meglio, per i tre test in esame, la loro entità e influenza sulla dinamica del sistema.
Vengono infine illustrati i grafici relativi ai valori assunti, durante l’evoluzione del ciclo iterativo di identificazione, dalla funzione errore f(x), dagli stessi parametri sopra citati e
dai moduli degli errori massimi sulle velocità angolari di ruota e tamburo. Detti errori sono calcolati sia nell’intervallo 0÷2 secondi che nell’intervallo 2÷8 secondi e sono espressi in percentuale del valore sperimentale di inizio simulazione.
Appendice F Risultati dell’identificazione con modello energetico
Test1, α=0.95
0 0.05 0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 sx µ b 0 2 4 6 8 -0.05 0 0.05 0.1 s x 0 2 4 6 8 -0.2 0 0.2 0.4 0.6 tempo [s] µbfigura F.1 Andamento temporale di µbe s e loro dipendenza reciproca. x
0 2 4 6 8 1000 2000 3000 F ro ll [ N ] 0 2 4 6 8 -1 0 1x 10 5 F b [N ] 0 2 4 6 8 0 5 10x 10 4 tempo [s] F [N ] 0 2 4 6 8 0 0.005 0.01 x ro ll [m ] 0 2 4 6 8 -0.05 0 0.05 x b [ m ] 0 2 4 6 8 -0.05 0 0.05 tempo [s] x [ m ]
Appendice F Risultati dell’identificazione con modello energetico
Test1, α=0.95
0 1 2 3 4 5 6 7 10-3 10-2 10-1 f( x ) [ lo g ] 0 1 2 3 4 5 6 7 7 8 9 Kµ s x 0 1 2 3 4 5 6 7 -44 -42 -40 C 0 0 1 2 3 4 5 6 7 0 0.2 0.4 Iteration C 1 figura F.3 Variazione di f(x), x sKµ , C e 0 C1 durante il ciclo iterativo di identificazione.
0 2 4 6 8 0.016 0.018 0.02 0.022 W heel W heel W heel W heel M A X |ωs a m p -ω s im | 0 2 /ω s a m p (0 ) 0 2 4 6 8 4 6 8 10x 10 -3 Iteration M A X |ω s a m p -ω s im | 2 8 /ω s a m p (0 ) 0 2 4 6 8 4.6 4.8 5 5.2x 10
-3 DrumDrumDrumDrum
M A X |ωs a m p -ω s im | 0 2/ω s a m p (0 ) 0 2 4 6 8 6.5 7 7.5 8x 10 -3 Iteration M A X |ω s a m p -ω s im | 2 8/ω s a m p (0 )
figura F.4 Variazione, durante il ciclo iterativo di identificazione, del modulo dell’errore
massimo, calcolato negli intervalli 0÷2 e 2÷8 secondi, espresso in percentuale del valore sperimentale di inizio simulazione.
Appendice F Risultati dell’identificazione con modello energetico
Test2, α=0.95
0 0.05 0.1 0.15 0.2 0 0.1 0.2 0.3 0.4 0.5 0.6 sx µ b 0 2 4 6 8 -0.05 0 0.05 0.1 0.15 s x 0 2 4 6 8 -0.2 0 0.2 0.4 0.6 tempo [s] µbfigura F.5 Andamento temporale di µbe s e loro dipendenza reciproca. x
0 2 4 6 8 0 2000 4000 F ro ll [ N ] 0 2 4 6 8 -1 0 1x 10 5 F b [N ] 0 2 4 6 8 0 5 10x 10 4 tempo [s] F [N ] 0 2 4 6 8 0 0.01 0.02 x ro ll [m ] 0 2 4 6 8 -0.05 0 0.05 x b [ m ] 0 2 4 6 8 -0.05 0 0.05 tempo [s] x [ m ]
Appendice F Risultati dell’identificazione con modello energetico
Test2, α=0.95
0 0.5 1 1.5 2 2.5 3 10-3 10-2 10-1 f( x ) [ lo g ] 0 0.5 1 1.5 2 2.5 3 6.8 7 7.2 Kµ s x 0 0.5 1 1.5 2 2.5 3 -31.9 -31.8 -31.7 C 0 0 0.5 1 1.5 2 2.5 3 0.15 0.16 0.17 Iteration C 1figura F.7 Variazione di f(x), Kµsx , C e 0 C1 durante il ciclo iterativo di identificazione.
0 1 2 3 0.026 0.028 0.03 0.032 0.034 W heel W heel W heel W heel M A X |ω s a m p -ω s im | 0 2 /ω s a m p (0 ) 0 1 2 3 4 4.5 5 5.5x 10 -3 Iteration M A X |ωs a m p -ω s im | 2 8 /ω s a m p (0 ) 0 1 2 3 3.65 3.7 3.75 3.8x 10
-3 DrumDrumDrumDrum
M A X |ωs a m p -ω s im | 0 2 /ω s a m p (0 ) 0 1 2 3 4.3 4.4 4.5x 10 -3 Iteration M A X |ω s a m p -ω s im | 2 8 /ω s a m p (0 )
figura F.8 Variazione, durante il ciclo iterativo di identificazione, del modulo dell’errore
massimo, calcolato negli intervalli 0÷2 e 2÷8 secondi, espresso in percentuale del valore sperimentale di inizio simulazione.
Appendice F Risultati dell’identificazione con modello energetico
Test3, α=0.95
0 0.05 0.1 0.15 0.2 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 sx µ b 0 2 4 6 8 -0.05 0 0.05 0.1 0.15 0.2 s x 0 2 4 6 8 -0.2 0 0.2 0.4 0.6 0.8 tempo [s] µbfigura F.9 Andamento temporale di µbe s e loro dipendenza reciproca. x
0 2 4 6 8 0 2000 4000 F ro ll [N ] 0 2 4 6 8 -5 0 5x 10 4 F b [N ] 0 2 4 6 8 0 2 4x 10 4 tempo [s] F [N ] 0 2 4 6 8 0 0.02 0.04 x ro ll [ m ] 0 2 4 6 8 -0.1 0 0.1 x b [ m ] 0 2 4 6 8 -0.05 0 0.05 tempo [s] x [ m ]
Appendice F Risultati dell’identificazione con modello energetico
Test3, α=0.95
0 5 10 15 20 25 30 10-3 10-2 10-1 f( x ) [l o g ] 0 5 10 15 20 25 30 2 4 6 Kµ s x 0 5 10 15 20 25 30 -60 -40 -20 C 0 0 5 10 15 20 25 30 0 1 2 Iteration C 1figura F.11 Variazione di f(x), Kµsx , C e 0 C1 durante il ciclo iterativo di identificazione.
0 10 20 30 0.2 0.22 0.24 0.26 W heel W heel W heel W heel M A X |ωs a m p -ω s im | 0 2 /ω s a m p (0 ) 0 10 20 30 4 6 8 10x 10 -3 Iteration M A X |ωs a m p -ω s im | 2 8 /ω s a m p (0 ) 0 10 20 30 2.7 2.8 2.9 3x 10
-3 DrumDrumDrumDrum
M A X |ωs a m p -ω s im | 0 2 /ω s a m p (0 ) 0 10 20 30 4.35 4.4 4.45 4.5 4.55x 10 -3 Iteration M A X |ωs a m p -ω s im | 2 8 /ω s a m p (0 )
figura F.12 Variazione, durante il ciclo iterativo di identificazione, del modulo dell’errore
massimo, calcolato negli intervalli 0÷2 e 2÷8 secondi, espresso in percentuale del valore sperimentale di inizio simulazione.
Appendice F Risultati dell’identificazione con modello energetico
Test1, α=0.5
0 0.05 0.1 0.15 0.2 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 sx µb 0 2 4 6 8 -0.05 0 0.05 0.1 0.15 s x 0 2 4 6 8 -0.2 0 0.2 0.4 0.6 tempo [s] µbfigura F.13 Andamento temporale di µbe s e loro dipendenza reciproca. x
0 2 4 6 8 0 5000 10000 F ro ll [ N ] 0 2 4 6 8 -1 0 1x 10 5 F b [N ] 0 2 4 6 8 0 5 10x 10 4 tempo [s] F [N ] 0 2 4 6 8 0 0.01 0.02 x ro ll [m ] 0 2 4 6 8 -0.05 0 0.05 x b [ m ] 0 2 4 6 8 -0.05 0 0.05 tempo [s] x [ m ]
Appendice F Risultati dell’identificazione con modello energetico
Test1, α=0.5
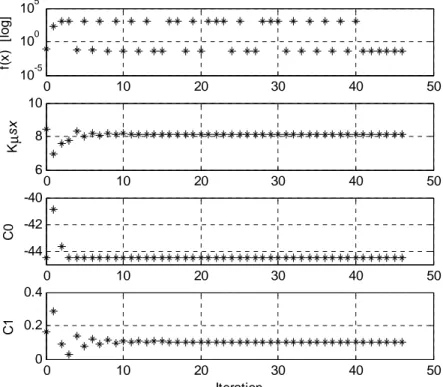
0 10 20 30 40 50 10-5 100 105 f( x ) [ lo g ] 0 10 20 30 40 50 6 8 10 Kµ s x 0 10 20 30 40 50 -44 -42 -40 C 0 0 10 20 30 40 50 0 0.2 0.4 Iteration C 1 figura F.15 Variazione di f(x), x sKµ , C e 0 C1 durante il ciclo iterativo di identificazione.
0 20 40 60 0 0.2 0.4 0.6 0.8 1 W heel W heel W heel W heel M A X |ω s a m p -ω s im | 0 2 /ω s a m p (0 ) 0 20 40 60 0 0.2 0.4 0.6 0.8 Iteration M A X |ω s a m p -ω s im | 2 8 /ω s a m p (0 ) 0 20 40 60 0 0.2 0.4 0.6 0.8 Drum Drum Drum Drum M A X |ω s a m p -ω s im | 0 2 /ω s a m p (0 ) 0 20 40 60 0 0.2 0.4 0.6 0.8 Iteration M A X |ω s a m p -ω s im | 2 8 /ω s a m p (0 )
figura F.16 Variazione, durante il ciclo iterativo di identificazione, del modulo dell’errore
massimo, calcolato negli intervalli 0÷2 e 2÷8 secondi, espresso in percentuale del valore sperimentale di inizio simulazione.
Appendice F Risultati dell’identificazione con modello energetico
Test2, α=0.5
0 0.05 0.1 0.15 0.2 0 0.1 0.2 0.3 0.4 0.5 0.6 sx µ b 0 2 4 6 8 -0.05 0 0.05 0.1 0.15 s x 0 2 4 6 8 -0.2 0 0.2 0.4 0.6 tempo [s] µbfigura F.17 Andamento temporale di µbe s e loro dipendenza reciproca. x
0 2 4 6 8 0 2000 4000 F ro ll [ N ] 0 2 4 6 8 -1 0 1x 10 5 F b [N ] 0 2 4 6 8 0 5 10x 10 4 tempo [s] F [N ] 0 2 4 6 8 0 0.01 0.02 x ro ll [m ] 0 2 4 6 8 -0.05 0 0.05 x b [ m ] 0 2 4 6 8 -0.05 0 0.05 tempo [s] x [ m ]
Appendice F Risultati dell’identificazione con modello energetico
Test2, α=0.5
0 1 2 3 4 5 6 7 10-4 10-2 100 f( x ) [ lo g ] 0 1 2 3 4 5 6 7 6.8 7 7.2 Kµ s x 0 1 2 3 4 5 6 7 -32.5 -32 -31.5 C 0 0 1 2 3 4 5 6 7 0.1 0.15 0.2 Iteration C 1figura F.19 Variazione di f(x), Kµsx , C e 0 C1 durante il ciclo iterativo di identificazione.
0 2 4 6 8 0.01 0.02 0.03 0.04 W heel W heelW heel W heel M A X |ωs a m p -ω s im | 0 2/ω s a m p (0 ) 0 2 4 6 8 4 6 8 10x 10 -3 Iteration M A X |ω s a m p -ω s im | 2 8/ω s a m p (0 ) 0 2 4 6 8 3.6 3.7 3.8 3.9x 10
-3 Drum Drum Drum Drum
M A X |ωs a m p -ω s im | 0 2 /ω s a m p (0 ) 0 2 4 6 8 4.4 4.6 4.8x 10 -3 Iteration M A X |ω s a m p -ω s im | 2 8 /ω s a m p (0 )
figura F.20 Variazione, durante il ciclo iterativo di identificazione, del modulo dell’errore
massimo, calcolato negli intervalli 0÷2 e 2÷8 secondi, espresso in percentuale del valore sperimentale di inizio simulazione.
Appendice F Risultati dell’identificazione con modello energetico
Test3, α=0.5
0 0.05 0.1 0.15 0.2 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 sx µ b 0 2 4 6 8 -0.05 0 0.05 0.1 0.15 0.2 s x 0 2 4 6 8 -0.2 0 0.2 0.4 0.6 0.8 tempo [s] µbfigura F.21 Andamento temporale di µbe s e loro dipendenza reciproca. x
0 2 4 6 8 0 2000 4000 F ro ll [N ] 0 2 4 6 8 -5 0 5x 10 4 F b [N ] 0 2 4 6 8 0 2 4x 10 4 tempo [s] F [N ] 0 2 4 6 8 0 0.02 0.04 x ro ll [ m ] 0 2 4 6 8 -0.1 0 0.1 x b [ m ] 0 2 4 6 8 -0.05 0 0.05 tempo [s] x [ m ]
Appendice F Risultati dell’identificazione con modello energetico
Test3, α=0.5
0 5 10 15 20 10-5 100 105 f( x ) [ lo g ] 0 5 10 15 20 0 5 10 Kµ s x 0 5 10 15 20 -60 -40 -20 C 0 0 5 10 15 20 0 1 2 Iteration C 1figura F.23 Variazione di f(x), Kµsx , C e 0 C1 durante il ciclo iterativo di identificazione.
0 5 10 15 20 0 0.2 0.4 0.6 0.8 1 W heel W heel W heel W heel M A X |ωs a m p -ω s im | 0 2 /ω s a m p (0 ) 0 5 10 15 20 0 0.2 0.4 0.6 0.8 1 Iteration M A X |ω s a m p -ω s im | 2 8 /ω s a m p (0 ) 0 5 10 15 20 0 0.05 0.1 0.15 0.2 Drum DrumDrum Drum M A X |ωs a m p -ω s im | 0 2 /ω s a m p (0 ) 0 5 10 15 20 0 0.2 0.4 0.6 0.8 Iteration M A X |ω s a m p -ω s im | 2 8/ω s a m p (0 )
figura F.24 Variazione, durante il ciclo iterativo di identificazione, del modulo dell’errore
massimo, calcolato negli intervalli 0÷2 e 2÷8 secondi, espresso in percentuale del valore sperimentale di inizio simulazione.
Appendice F Risultati dell’identificazione con modello energetico
F.2 Simulazioni del sistema ruota mediante l’uso dei parametri
identificati
Anche in questo caso, analogamente a quanto fatto nel paragrafo F.1 per il sistema ruota-tamburo, vengono illustrati i grafici, ottenuti mediante simulazione coi parametri
x s
Kµ , C 0 e C1 identificati, relativi agli andamenti temporali del coefficiente di attrito µb e dello scorrimento sx, nonché la loro dipendenza reciproca, gli andamenti temporali del braccio x e delle sue componenti xroll e x , della forza longitudinale F e delle sue componenti b Froll e
b
F . Vengono inoltre illustrati grafici relativi ai valori assunti, durante l’evoluzione del ciclo iterativo di identificazione, dalla funzione errore f(x), dai parametri stessi e dal modulo
dell’errore massimo, in questo caso calcolato per la sola ruota nell’intervallo 0÷2 e 2÷8 secondi ed espresso in percentuale del valore sperimentale di inizio simulazione.
Appendice F Risultati dell’identificazione con modello energetico
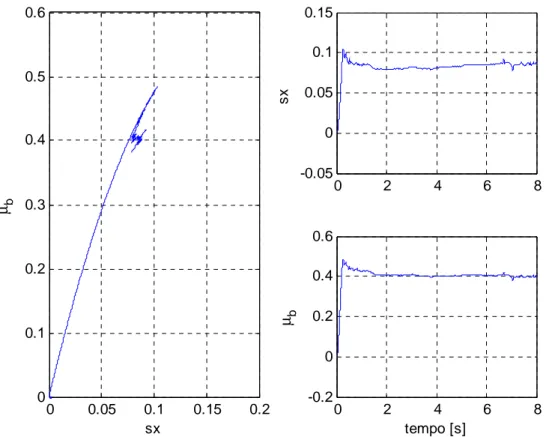
Test1
0 0.02 0.04 0.06 0.08 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 sx µb 0 2 4 6 8 0 0.02 0.04 0.06 0.08 s x 0 2 4 6 8 0 0.1 0.2 0.3 0.4 0.5 tempo [s] µ bfigura F.25 Andamento temporale di µbe s e loro dipendenza reciproca. x
0 2 4 6 8 1000 2000 3000 F ro ll [ N ] 0 2 4 6 8 0 5 10x 10 4 F b [N ] 0 2 4 6 8 0 5 10x 10 4 tempo [s] F [N ] 0 2 4 6 8 0 0.005 0.01 x ro ll [m ] 0 2 4 6 8 -0.04 -0.02 0 x b [ m ] 0 2 4 6 8 -0.05 0 0.05 tempo [s] x [ m ]
Appendice F Risultati dell’identificazione con modello energetico
Test1
0 0.5 1 1.5 2 2.5 3 10-2.09 10-2.08 f( x ) [ lo g ] 0 0.5 1 1.5 2 2.5 3 8 8.5 9 Kµ s x 0 0.5 1 1.5 2 2.5 3 -50 -45 -40 C 0 0 0.5 1 1.5 2 2.5 3 0.2 0.25 Iteration C 1figura F.27 Variazione di f(x), Kµsx , C e 0 C1 durante il ciclo iterativo di identificazione.
0 0.5 1 1.5 2 2.5 3 0.0225 0.023 0.0235 0.024 0.0245 0.025 0.0255 M A X |ω s a m p -ω s im | 0 2 / ωsa m p (0 ) 0 0.5 1 1.5 2 2.5 3 4.95 5 5.05 5.1x 10 -3 Iteration M A X |ω s a m p -ω s im |2 8 / ωsa m p (0 )
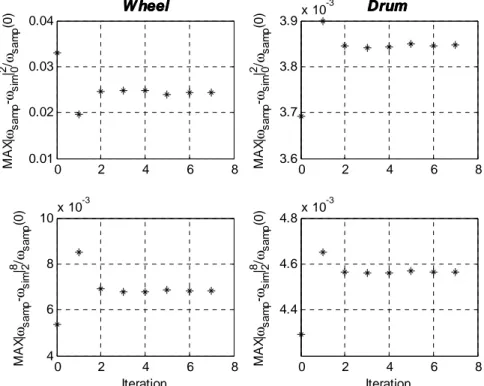
figura F.28 Variazione, durante il ciclo iterativo di identificazione, del modulo dell’errore
Appendice F Risultati dell’identificazione con modello energetico
Test2
0 0.05 0.1 0.15 0.2 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 sx µb 0 2 4 6 8 0 0.05 0.1 0.15 0.2 s x 0 2 4 6 8 0 0.1 0.2 0.3 0.4 0.5 tempo [s] µ bfigura F.29 Andamento temporale di µbe s e loro dipendenza reciproca. x
0 2 4 6 8 0 2000 4000 F ro ll [ N ] 0 2 4 6 8 0 5 10x 10 4 F b [N ] 0 2 4 6 8 0 5 10x 10 4 tempo [s] F [N ] 0 2 4 6 8 0 0.01 0.02 x ro ll [m ] 0 2 4 6 8 -0.04 -0.02 0 x b [ m ] 0 2 4 6 8 -0.05 0 0.05 tempo [s] x [ m ]
Appendice F Risultati dell’identificazione con modello energetico
Test2
0 5 10 15 20 10-2.29 10-2.25 f( x ) [ lo g ] 0 5 10 15 20 6.5 7 7.5 Kµ s x 0 5 10 15 20 -40 -35 -30 C 0 0 5 10 15 20 0.16 0.18 0.2 Iteration C 1 figura F.31 Variazione di f(x), x sKµ , C e 0 C1 durante il ciclo iterativo di identificazione.
0 5 10 15 20 0.032 0.033 0.034 0.035 0.036 M A X |ω s a m p -ω s im | 0 2 / ωsa m p (0 ) 0 5 10 15 20 4.7 4.75 4.8 4.85 4.9 4.95 5x 10 -3 Iteration M A X |ω s a m p -ω s im |2 8 / ωsa m p (0 )
figura F.32 Variazione, durante il ciclo iterativo di identificazione, del modulo dell’errore
Appendice F Risultati dell’identificazione con modello energetico
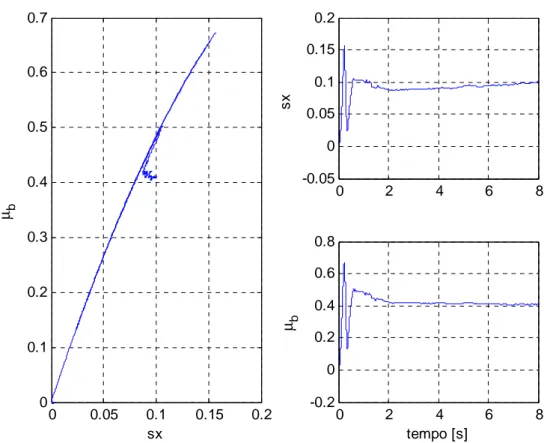
Test3
0 0.05 0.1 0.15 0.2 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 sx µ b 0 2 4 6 8 0 0.05 0.1 0.15 0.2 s x 0 2 4 6 8 0 0.2 0.4 0.6 0.8 tempo [s] µ bfigura F.33 Andamento temporale di µbe s e loro dipendenza reciproca. x
0 2 4 6 8 0 2000 4000 F ro ll [ N ] 0 2 4 6 8 0 2 4x 10 4 F b [N ] 0 2 4 6 8 0 2 4x 10 4 tempo [s] F [N ] 0 2 4 6 8 0 0.02 0.04 x ro ll [m ] 0 2 4 6 8 -0.1 -0.05 0 x b [ m ] 0 2 4 6 8 -0.05 0 0.05 tempo [s] x [ m ]
Appendice F Risultati dell’identificazione con modello energetico
Test3
0 2 4 6 8 10 12 10-3 10-2 10-1 f( x ) [ lo g ] 0 2 4 6 8 10 12 2 4 6 Kµ s x 0 2 4 6 8 10 12 -60 -40 -20 C 0 0 2 4 6 8 10 12 0 0.5 1 Iteration C 1 figura F.35 Variazione di f(x), x sKµ , C e 0 C1 durante il ciclo iterativo di identificazione.
0 2 4 6 8 10 12 0.2 0.21 0.22 0.23 0.24 0.25 M A X |ω s a m p -ω s im | 0 2 / ωsa m p (0 ) 0 2 4 6 8 10 12 4 5 6 7 8 9 10x 10 -3 Iteration M A X |ω s a m p -ω s im |2 8 / ωsa m p (0 )