A-4.1 DESCRIZIONE DEI PARAMETRI
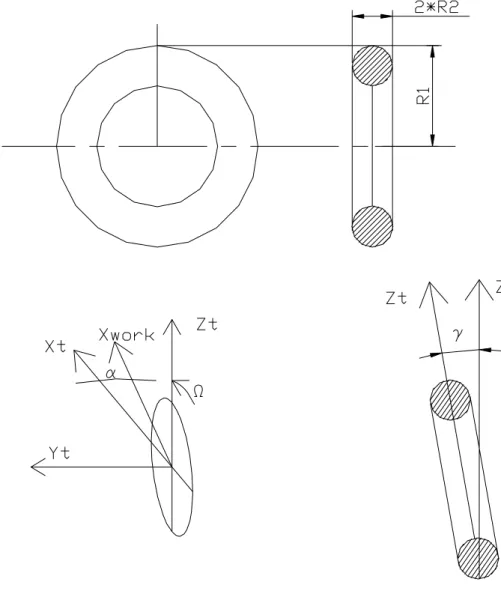
A-4.1.1 Sistemi di riferimento della ruota e principali variabili
A-4.1.2 Finestra di dialogo in ADAMS/View
La prima operazione da compiere per implementare un modello di pneumatico predefinito in ADAMS come il FIALA è quella di scegliere nel menù delle Forze l’opzione “Tire”.
Così facendo, si apre una finestra (Fig. A-4.2) in cui vanno inserite, digitandole da tastiera, alcune caratteristiche del pneumatico.
A-4.2 Finestra creazione pneumatico
I parametri richiesti sono:
- Tire Name: il nome del pneumatico.
- Selezione modello di pneumatico: scelta del modello di pneumatico tra quelli disponibili. Scegliendo il tipo FIALA alcune voci della finestra sono cancellate.
- Attachment Marker: il nome del Marker sul quale si vuol posizionare il centro del pneumatico. E’ il Marker sul quale sarà ubicato il Revolute Joint automaticamente generato dal “Tire”.
- Tire Mass: la massa della ruota.
- Tire Inertia Moments: il tensore di inerzia della ruota.
- Tire Property File: il percorso per accedere al file con le caratteristiche fisiche del pneumatico (TPF).
- Road Data File: il percorso per accedere al file con i dati riguardanti la descrizione della strada (RDF)
- Spin Velocity: la velocità angolare iniziale della ruota. - Tire Width: opzione grafica, larghezza della ruota.
- Segment Count: opzione grafica, numero di segmenti in cui dividere la circonferenza della ruota.
- Relaxation Lenght: facoltativo
- Initial Slip Angle: facoltativo, angolo di deriva iniziale definito in [4] come l’angolo formato tra l’asse longitudinale X della ruota e la direzione di lavoro della ruota a t = 0. - Opzione attivazione Road Grafics: consente di attivare o meno la grafica della strada. - Selezione Attachment: scelta tra l’uso di un Revolute Joint automaticamente generato o di
un vincolo alternativo creato dall’utente.
A-4.1.3 Tire Property File
Il Tire Property File è un file di testo esterno contenente le caratteristiche fisiche del pneumatico. Si descrivono di seguito le singole voci nell’ordine in cui compaiono sul file.
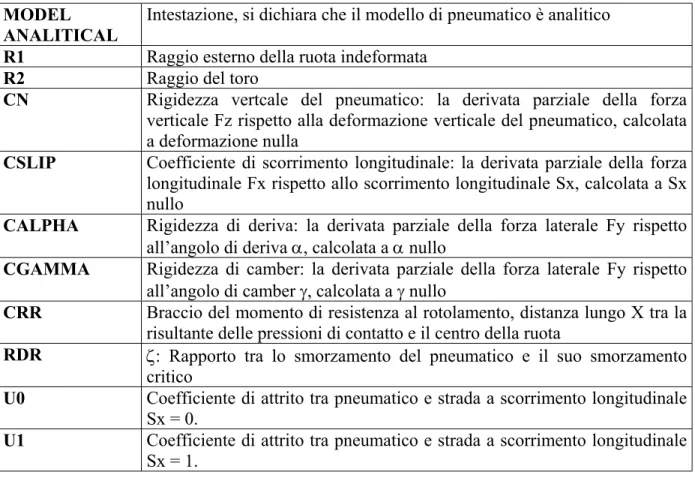
MODEL ANALITICAL
Intestazione, si dichiara che il modello di pneumatico è analitico
R1 Raggio esterno della ruota indeformata
R2 Raggio del toro
CN Rigidezza vertcale del pneumatico: la derivata parziale della forza
verticale Fz rispetto alla deformazione verticale del pneumatico, calcolata a deformazione nulla
CSLIP Coefficiente di scorrimento longitudinale: la derivata parziale della forza longitudinale Fx rispetto allo scorrimento longitudinale Sx, calcolata a Sx nullo
CALPHA Rigidezza di deriva: la derivata parziale della forza laterale Fy rispetto all’angolo di deriva α, calcolata a α nullo
CGAMMA Rigidezza di camber: la derivata parziale della forza laterale Fy rispetto all’angolo di camber γ, calcolata a γ nullo
CRR Braccio del momento di resistenza al rotolamento, distanza lungo X tra la
risultante delle pressioni di contatto e il centro della ruota
RDR ζ: Rapporto tra lo smorzamento del pneumatico e il suo smorzamento
critico
U0 Coefficiente di attrito tra pneumatico e strada a scorrimento longitudinale
Sx = 0.
U1 Coefficiente di attrito tra pneumatico e strada a scorrimento longitudinale
Sx = 1.
Tab. A-4.1 Tire Property File
Nel modello implementato in questo lavoro non hanno nessuna influenza le caratteristiche relative alla dinamica laterale del pneumatico, in quanto le simulazioni condotte sono tutte caratterizzate da dinamiche simmetriche rispetto al piano longitudinale.
A-4.1.4 Road Data File
Il Road Data File è un file di testo esterno in cui sono descritte le caratteristiche fisiche e geometriche della strada.
METHOD
gendata Intestazione, notifica al Solver che questo file fornisce dati sulla strada nelformato generale di profili stradali
X_SCALE Fattore di conversione di tutte le componentti X degli input
Y_SCALE Fattore di conversione di tutte le componentti Y degli input
Z_SCALE Fattore di conversione di tutte le componentti Z degli input
ORIGIN
x, y, z
Specifica le coordinate dell’origine della strada rispetto all’origine globale del modello
UP
x, y, z
Specifica le componenti del vettore che indica la faccia della strada su cui si muove la ruota
ORIENTATION
x1, y1, z1 x2, y2, z2 x3, y3, z3
Specifica la matrice di trasformazione del sistema di riferimento locale della strada nel sistema di riferimento globale del modello
NODES
N° nodes N1, x1, y1,z1 Nn, xn, yn, zn
Specifica il numero di nodi che compongono la geometria della strada e, per ognuno di essi, le coordinate nel sistema di riferimento della strada
ELEMENTS
N° elements N1, N2, N3, U0, U1,
Specifica il numero di elementi triangolari che costituiscono la geometria della strada e, per ognuno di essi, il nome dei nodi che costituiscono i suoi vertici e i coefficienti di attrito U0 e U1. Questi hanno la stessa definizione che nel TPF, e il loro valore va a moltiplicare il rispettivo nel TPF per ottenere i coefficienti di attrito effettivi
A-4.2 IL MODELLO MATEMATICO
Si descrive in questa parte solo il modello matematico relativo alle grandezze nel piano longitudinale. Quanto segue è tratto da [4] .
A-4.2.1 Forza verticale
Con riferimento alla Tab A-4.1 la forza verticale è sempre negativa ed è definita dall’espressione:
Fz min 0.0 F zk F zc, Fz min 0.0 F zk F zc,
Fz min 0.0 F zk F zc, (A 4.1)
Dove Fzk è la forza dovuta alla rigidezza e Fzc è la forza dovuta allo smorzamento. Queste
hanno le espressioni:
F zk CN dzCNCN. (A 4.2)
F zc 2 M.MM. CN.RDR.dzp (A 4.3)
in cui dz è la deformazione verticale del pneumatico e dzp la velocità di deformazione verticale del pneumatico.
A-4.2.2 forza longitudinale
Fig. A-4.3
Con riferimento alla Fig. A-4.3 è definita la variabile scorrimento longitudinale con la seguente espressione: Sx min 1.0 V xc V x , Sx min 1.0 V xc V x , Sx min 1.0 V xc V x , (A 4.4)
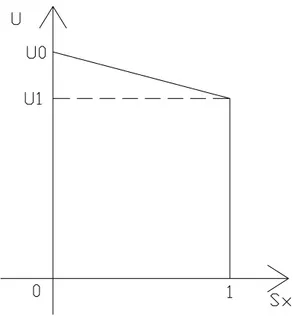
Il coefficiente di attrito tra pneumatico e asfalto è:
U U0 (U1 U0U0U0) Sx. (A 4.5)
dove U0 e U1 sono i valori dei coefficienti di attrito a Sx = 0 e a Sx = 1, e sono il prodotto tra gli U0 e U1 defini nel TPF e gli U0 e U1 definiti nel RDF.
Fig. A-4.4 grafico U/Sx
Inoltre viene definito un valore di scorrimento critico, oltre il quale il pneumatico slitta:
Sxc U Fz. 2 CSLIP. U U A 4.6 ( )
La forza longitudinale è quindi: a) se Sx < Sxc
Fx CSLIP SxCSLIPCSLIP. (A 4.7) b) se Sx > Sxc Fx (Fx1 Fx2) Sx Sx . Fx2 Fx2 (A 4.8) dove: Fx1 U FzUU. (A 4.9) Fx2 (U Fz. ) 2 4 Sx. .CSLIP U U A 4.10 ( )
A-4.2.3 Momento di rotolamento
Con riferimento alla Tab A-4.1 per la definizione dei parammetri il momento di rotolamento è così definito:
A-4.3 I TIRE PROPERTY FILES E IL ROAD DATA FILE
A-4.3.1 Programma Matlab usato per calcolare le caratteristiche dei pneumatici FIALA
%Programma per determinare alcune grandezze caratteristiche del pneumatico per inserirle nel modello FIALA dx = 0.05; %passo di derivazione
% main landing gear wheel
def_w_z_LR = [0 0.01 0.02 0.04 0.06 ... 0.14 0.153 0.162 0.164]; % [m] fel_w_z_LR = [0 5320 12500 31410 52130 ... 135640 150000 175000 185000];%*2; % [N] load_LR = 4572.611*9.81; %[N] FZsuDEF_LR = polyfit(def_w_z_LR,fel_w_z_LR,2); DEFsuFZ_LR = polyfit(fel_w_z_LR,def_w_z_LR,2); Val1_LR = load_LR; x1_LR = polyval(DEFsuFZ_LR,Val1_LR); x2_LR = x1_LR+dx; Val2_LR = polyval(FZsuDEF_LR,x2_LR); Deriv_LR = (Val2_LR-Val1_LR)/dx;
% nose landing gear wheel def_w_z_N = [0 0.01 0.02 0.025 0.03 0.04 ... 0.075 0.09 0.1 0.105 0.11 0.1115]; % [m] fel_w_z_N = [0 1450 3500 4750 6250 10000 ... 26000 33250 38750 43000 50500 55000];%*2; % [N] load_N = 483.7075*9.81; %[N] FZsuDEF_N = polyfit(def_w_z_N,fel_w_z_N,2); DEFsuFZ_N = polyfit(fel_w_z_N,def_w_z_N,2); Val1_N = load_N; x1_N = polyval(DEFsuFZ_N,Val1_N); x2_N = x1_N+dx; Val2_N = polyval(FZsuDEF_N,x2_N); Deriv_N = (Val2_N-Val1_N)/dx;
disp('Rigidezza pneumatico NOSE:') Deriv_N
disp('Rigidezza pneumatico MAIN:') Deriv_LR figure; plot(def_w_z_LR,fel_w_z_LR,'r'); hold on plot(def_w_z_N,fel_w_z_N); title('Rigidezza pneumatici'); xlabel('Deformazione');
ylabel('Forza (Main rosso, Nose blu)');
figure; plot(slip,miM,'r'); hold on plot(slip,miN); title('Coefficiente di attrito'); xlabel('slip');
ylabel('mi (Main rosso, Nose blu)'); grid;
%Coefficienti U0 e U1 per mod. FIALA U0_LR = 0.8887; U1_LR = 0.5; U0_N = 0.9776; U1_N = 0.55;
%Coefficienti CSLIP per mod. FIALA
%CSLIP_LR = (miM(2)/slip(2))*load_LR/2; %diviso due perché per ogni carrello ci sono 2 pneumatici CSLIP_LR = ((miM(6)-miM(5))/(slip(6)-slip(5)))*load_LR/2;
%CSLIP_N = (miN(2)/slip(2))*load_N/2; %diviso due perché per ogni carrello ci sono 2 pneumatici CSLIP_N = ((miN(6)-miN(5))/(slip(6)-slip(5)))*load_N/2;
disp('Coefficienti U0 e U1 pneumatici NOSE') U0_N
U1_N
disp('Coefficienti U0 e U1 pneumatici MAIN') U0_LR
U1_LR
disp('Coefficiente CSLIP pneumatico NOSE') CSLIP_N
disp('Coefficiente CSLIP pneumatico MAIN') CSLIP_LR
%coefficienti di momento resistente di rotolamento (Xroll) CRR_LR = 0.015/0.4246;
CRR_N = 0.015/0.225;
disp('Coefficiente CRR pneumatico NOSE') CRR_N
disp('Coefficiente CRR pneumatico MAIN') CRR_LR
A-4.3.2 File PneumaticoMain.tpf MODEL ANALITICAL R1 1 0.4246 R2 1 0.1 CN 1000000 1.05 CSLIP 10000 7.6 CALPHA 100000 1 CGAMMA 100000 1 CRR 0.01 3.53 RDR 0 U0 0.8887 U1 0.5
A-4.3.3 File PneumaticoNose.tpf
MODEL ANALITICAL R1 1 0.225 R2 1 0.075 CN 100000 3.7 CSLIP 1000 8.87 CALPHA 10000 1 CGAMMA 10000 1 CRR 0.01 6.67 RDR 0 U0 0.9776
A-4.3.4 File Pista.rdf METHOD gendata X_SCALE 1 Y_SCALE 1 Z_SCALE 1 ORIGIN 20, -2.125, 0 UP 0, 1, 0 ORIENTATION 1, 0, 0 0, 1, 0 0, 0, 1 NODES 4 1, 0, 0, -7.5 2, 0, 0, 7.5 3, -1000, 0, 7.5 4, -1000, 0, -7.5 ELEMENTS 2 1, 2, 3, 1, 1 3, 4, 1, 1, 1
Da notare che nel RDF i valori di U0 e U1 sono stati impostati uguali a uno, in modo che i reali valori dei coefficienti di attrito a Sx = 0 e Sx 0 1 sono letti nel TPF.