1.REVERSE ENGINEERING: RASSEGNA E CLASSIFICAZIONE DEI SISTEMI ESISTENTI
1.Reverse Engineering: rassegna e classificazione dei
sistemi esistenti
A grandi linee possiamo dire che un sistema di reverse engineering completo, che cioè riceva in input il pezzo reale e che fornisca come output un modello CAD tridimensionale, opera secondo quattro fasi principali:
- Acquisizione dei dati
- Processamento dei dati acquisiti e ottenimento dei punti o delle linee - Adattamento delle superfici ai punti o linee ottenuti
- Creazione del modello CAD
La classificazione dei sistemi esistenti generalmente viene fatta relativamente al modo con cui vengono acquisiti i dati, vale a dire la prima fase, o anche a come vengono calcolate le coordinate tridimensionali dei punti acquisiti, ovvero la seconda fase.
Il confine tra questi due tipi di classificazione non è netto in quanto alcune metodologie di acquisizione possono richiedere necessariamente un particolare tipo di processamento dei dati e viceversa
Una prima basilare distinzione è quella tra i metodi tattili, che prevedono un contatto tra il sistema di misura e l’oggetto da acquisire, e quelli non tattili, che sono invece non invasivi.
I metodi tattili (figura 1.1) utilizzano la tecnica tradizionale delle macchine di misura, e hanno in comune la presenza, generalmente all’estremità di un braccio robotizzato, di un attuatore a controllo numerico o di un palpatore che sonda la superficie del pezzo da analizzare, secondo una procedura che dà buona precisione ma anche numerosi problemi.
La scansione completa risulta infatti molto lenta e la movimentazione del palpatore va fatta con particolare accortezza per evitare urti; in più presenta notevoli difficoltà nel rilevare parti interne o in sottosquadro a causa
1.REVERSE ENGINEERING: RASSEGNA E CLASSIFICAZIONE DEI SISTEMI ESISTENTI dell’ingombro della struttura che sorregge il tastatore; i punti ottenuti risultano poi disordinati,ovvero non presentano nessuna coerenza reciproca e inoltre queste macchine di rilevazione risultano piuttosto costose.
figura 1.1 esempio di macchinario con palpatore
Una categoria a parte riconducibile ai metodi tattili è quella delle macchine che operano in modo “distruttivo”: in questa tipologia includiamo ad esempio il sistema CGI (Capture Geometry Inside: vedi figura 1.2) che ricava delle sezioni sottili da una matrice polimerica in cui si “annega” il pezzo da analizzare, dopo un opportuno indurimento; di questa categoria fa parte anche la tecnica della criotomia (vedi figura 1.3) utilizzata in campo medico con la quale sono stati ricavati completi modelli del corpo umano.
1.REVERSE ENGINEERING: RASSEGNA E CLASSIFICAZIONE DEI SISTEMI ESISTENTI
figura 1.3 esempio di frame di una ricostruzione per criotomia del corpo umano
Abbiamo invece anche metodi non tattili che si possono dividere ulteriormente in metodi acustici, magnetici e ottici a seconda del fenomeno fisico che utilizzano per la ricostruzione tridimensionale.
I metodi acustici si basano in pratica sulla stessa tecnica dei sonar e di alcune macchine fotografiche con autofocus: conoscendo la velocità del suono e misurando il tempo necessario perché il suono emesso da una sorgente ritorni indietro dopo essere stato riflesso da un oggetto, si riesce a risalire alle distanze; questo metodo però è piuttosto sensibile al rumore a causa di interferenze acustiche.
I metodi magnetici più conosciuti sono quelli derivanti da quelli utilizzati nella diagnosi anatomica in campo medico i quali sfruttano l’oscillazione dei nuclei degli atomi di idrogeno contenuti nelle parti molli e liquide del corpo umano (la cosiddetta risonanza magnetica): essi si possono estendere infatti anche in campo industriale nello studio tridimensionale di membrane semipermeabili (ad esempio le lenti a contatto), o anche di oggetti qualsiasi che possono essere immersi in acqua e ricostruiti tridimensionalmente come l’inverso della forma assunta dal liquido che li contiene.
I metodi ottici sono indubbiamente quelli più promettenti sotto molti punti di vista (rapidità, precisione, versatilità, economicità): ad essi si stanno quindi dedicando sempre maggiori risorse ed interesse.
1.REVERSE ENGINEERING: RASSEGNA E CLASSIFICAZIONE DEI SISTEMI ESISTENTI Nell’ambito di questa categoria una prima distinzione separa i metodi cosiddetti passivi da quelli attivi.
figura 1.4 esempio di metodo passivo di ricostruzione tridimensionale
Nei metodi ottici passivi non è usata alcuna sorgente luminosa artificiale per ricavare la posizione dei punti: essa viene ricavata invece per triangolazione dall’analisi delle immagini ottenute da una coppia di camere (con questo termine indicheremo genericamente sia le telecamere che le fotocamere) posizionate in maniera differente rispetto alla stessa scena (vedi figura 1.4).
I metodi passivi però non sono molto utilizzati per la grande difficoltà di correlare le coppie di immagini in modo automatico, tanto che per questo motivo è praticamente necessario riportare una serie di riferimenti sull’oggetto (alcuni marker o griglie), oppure è necessario individuare le correlazioni manualmente; ad ogni modo il processo cosiddetto di “matching” (cioè di correlazione dei punti tra le due immagini) risulta piuttosto lento e difficoltoso.
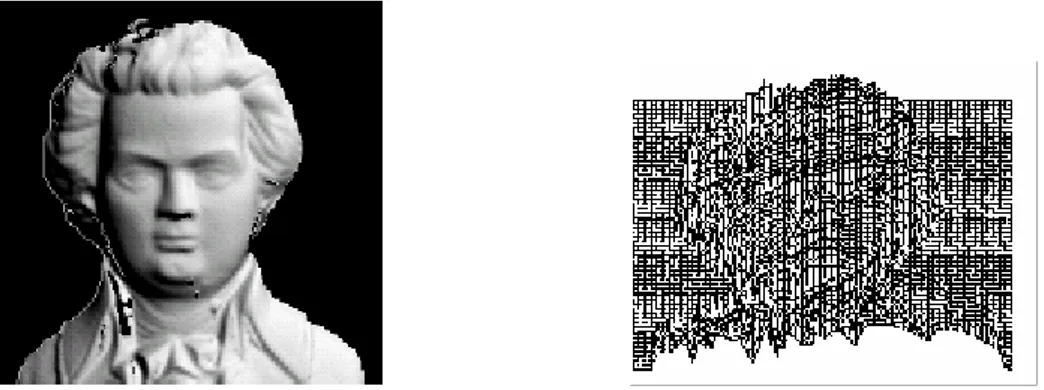
Fanno parte dei metodi passivi anche alcune tecniche per recuperare informazioni di profondità senza richiedere la ricerca della corrispondenza tra due viste, esse utilizzano invece alcune proprietà ottiche dell’oggetto nella scena (ad esempio l’ombreggiatura, la messa a fuoco, il contorno: anch’esse sono utilizzate abbastanza raramente dato che i risultati non sono così buoni come quelli ottenuti con altri metodi; un esempio di queste metodologie è riportato in figura 1.5.
1.REVERSE ENGINEERING: RASSEGNA E CLASSIFICAZIONE DEI SISTEMI ESISTENTI
figura 1.5 esempio di ottenimento della profondità dall’analisi dell’ombreggiatura
I metodi attivi sono invece quelli più promettenti (e pertanto più studiati e utilizzati) e si differenziano a loro volta secondo ulteriori criteri: in base alla sorgente luminosa utilizzata si possono avere sistemi laser (laser puntuale, piano laser), sistemi Moiré (proiezione di frange di interferenza) sistemi a luce strutturata (emessa da proiettori).
figura 1.6 proiezione di laser puntuale e di un piano laser
Il laser puntuale è stata in pratica una diretta evoluzione delle macchine di misura con contatto a cui è stato sostituito il tastatore con un laser: il metodo risulta quindi ancora piuttosto lento perché vanno sondati moltissimi punti dell’oggetto uno ad uno.
La proiezione di un piano laser (ottenuto da un normale laser mediante una opportuna lente cilindrica detta “Line Generator”) velocizza la procedura di
1.REVERSE ENGINEERING: RASSEGNA E CLASSIFICAZIONE DEI SISTEMI ESISTENTI acquisizione rispetto al laser puntuale ma necessita di un dispositivo di posizionamento e movimentazione del laser per poter scandire l’oggetto.
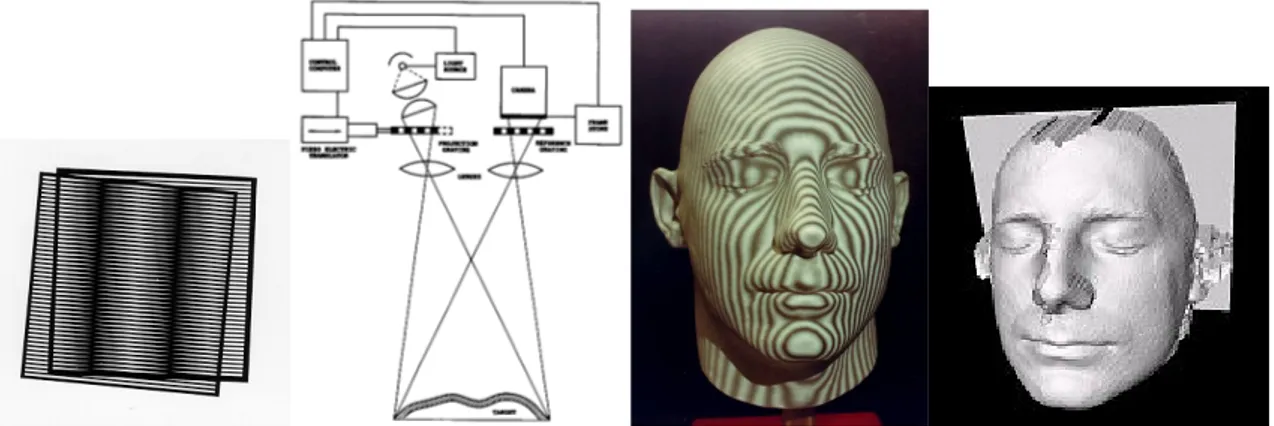
I metodi Moiré (vedi figure 1.7) permettono di risalire alla forma tridimensionale analizzando le immagini di alcune frange di interferenza proiettate sull’oggetto e modificate da esso; sono metodi particolarmente adatti per acquisizioni molto precise di superfici di grandi curvature e senza discontinuità, anche se sono ancora piuttosto lenti e poco automatici.
figure 1.7 alcune figure e schema inerenti al metodo di Moiré
Le tecniche che attualmente sembrano più interessanti sono quelle basate sulla luce strutturata (sistemi SLD Structured Light Devices): infatti non richiedono alcuna movimentazione dell’apparato hardware, consentendo quindi tempi di rilevazione piuttosto bassi ed eliminando gli errori dovuti al riposizionamento o movimento delle parti.
Questi metodi utilizzano proiettori di luce anche di tipo commerciale (di basso costo, facile reperibilità e soggetti ad una evoluzione e miglioramento costanti); consentono inoltre una grande libertà e versatilità riguardo al pattern di luce con cui investire l’oggetto.
Si possono utilizzare normali proiettori LCD (liquid crystal device) o più costosi e performanti “Slide projector” come il Texas Instrument DMD (digital mircromirror device) che funzionano con microspecchi movimentabili molto rapidamente e dotati di risoluzioni e precisioni maggiori.
1.REVERSE ENGINEERING: RASSEGNA E CLASSIFICAZIONE DEI SISTEMI ESISTENTI I sistemi SLD attualmente studiati e proposti in ambito sperimentale si differenziano, oltre che per l’hardware utilizzato, in base a numerose soluzioni per quanto riguarda il pattern luminoso proiettato (vedi alcuni esempi nelle figure 1.8).
Proprio lo studio di questo aspetto si sta rivelando fondamentale sia per migliorare la precisione della ricostruzione tridimensionale delle superfici sia per ridurre il più possibile i tempi di acquisizione (cosa importante non solo dal punto di vista della prestazione in sé stessa, ma anche per poter utilizzare queste tecniche su esseri animati od oggetti in movimento).
figure 1.8 alcuni tipi di pattern proiettati: reticolo, pattern lineare, color code e gray code
Attualmente nell’ambito dello studio e sviluppo di queste metodi SLD è stata messa un po’ da parte la proiezione di reticoli, mentre si stanno sviluppando con molti risultati interessanti tecniche cosiddette “a luce codificata” che in pratica consistono in proiezioni di opportuni pattern luminosi che permettono di codificare i punti delle immagini mediante l’utilizzo di livelli di grigio o colore, oppure mediante particolari successioni temporali dei pattern (o anche grazie ad entrambe le cose).
Il tipo più comune di codifica è il cosiddetto Gray Code che consiste nella proiezione di una sequenza di pattern di strisce bianche o nere con una particolare successione temporale che in pratica realizza una codifica binaria per ogni striscia.
Ottenere un codice relativo ad ogni striscia è molto importante per stabilire la corrispondenza tra i punti della coppia proiettore-camera o camera-camera
1.REVERSE ENGINEERING: RASSEGNA E CLASSIFICAZIONE DEI SISTEMI ESISTENTI del nostro sistema di stereovisione, fondamentale per poter ricostruire la posizione tridimensionale dei punti della superficie scansionata.
Il tipo di pattern proiettato però è importante anche per quanto riguarda le prestazioni del sistema di scansione tridimensionale in termini di tempi, precisione e versatilità.
Uno studio approfondito sull’ottimizzazione dei pattern da proiettare è stato fatto da Eli Horn e Nahun Kiryati [4] e si è visto che tecniche a luce codificata basate sull’intensità di grigio o sul colore danno risultati paragonabili al Gray Code (in termini di precisione) con minor numero di pattern proiettati (quindi minor tempo di acquisizione), ma rispetto all’ormai ben conosciuto Gray code funzionano sicuramente meno bene con oggetti dalla riflettività non uniforme (in pratica si rende necessaria una colorazione in bianco dell’oggetto) anche se si stanno sperimentando metodi (a livelli di grigio e con colore) che ottimizzano i risultati adattandosi alla scena in modo automatico.
Considerando ancora i metodi a luce codificata, possiamo fare ulteriori distinzioni in base al tipo di triangolazione eseguita per ricavare la posizione nello spazio dei punti.
Innanzi tutto abbiamo sistemi che utilizzano, oltre al proiettore, due camere oppure altri che hanno una camera sola (per semplicità nel seguito chiameremo, un po’ impropriamente, questi sistemi rispettivamente “stereo” e “mono”).
I primi calcolano le corrispondenze tra i punti delle immagini acquisiti dalle due camere e ne eseguono la triangolazione; i secondi invece fanno la stessa cosa tra i punti di una immagine e quelli del pattern del proiettore: l’aspetto teorico della ricostruzione, come vedremo più dettagliatamente in seguito, cambia molto poco tra i due casi.
La triangolazione inoltre può essere fatta tra due punti corrispondenti o tra un punto e una linea che contiene il punto corrispondente nell’altra immagine; variano anche le tecniche per calcolare queste corrispondenze: anche questo però sarà trattato successivamente.
1.REVERSE ENGINEERING: RASSEGNA E CLASSIFICAZIONE DEI SISTEMI ESISTENTI
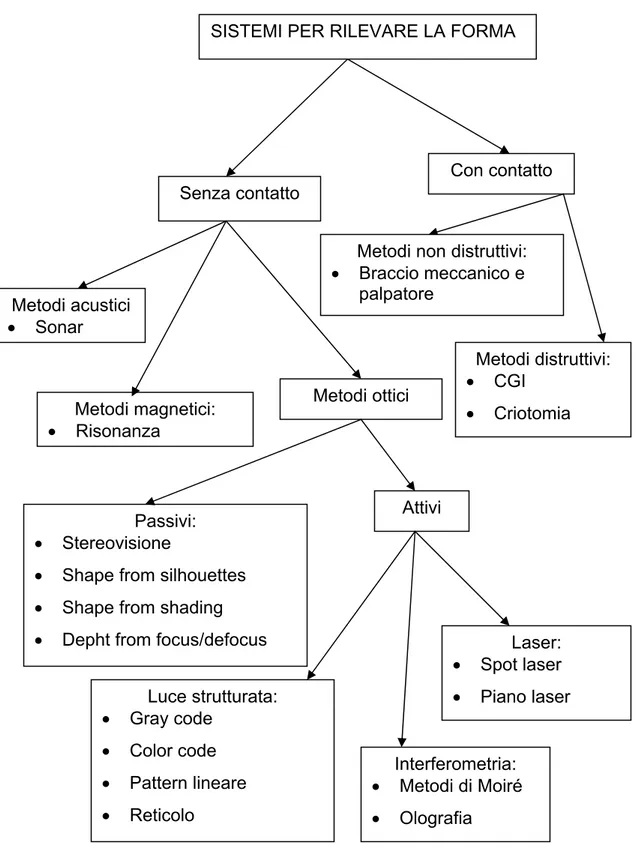
Figura 1.9 Schema della classificazione dei sistemi di ricostruzione di forma
Senza contatto Con contatto Metodi magnetici: • Risonanza Passivi: • Stereovisione
• Shape from silhouettes • Shape from shading • Depht from focus/defocus
SISTEMI PER RILEVARE LA FORMA
Metodi acustici • Sonar
Metodi ottici
Attivi
Metodi non distruttivi: • Braccio meccanico e palpatore Luce strutturata: • Gray code • Color code • Pattern lineare • Reticolo Metodi distruttivi: • CGI • Criotomia Laser: • Spot laser • Piano laser Interferometria: • Metodi di Moiré • Olografia