Capitolo 1
Il convertitore boost
1.1 Introduzione
La maggior parte dei sistemi elettronici analogici e digitali necessita di alimentatori stabilizzati in continua, che vengono progettati per soddisfare i seguenti requisiti:
- Uscita controllata: la tensione di uscita deve restare costante entro un’opportuna tolleranza sia per variazioni della tensione di ingresso che per variazioni del carico.
- Isolamento: può essere richiesto che l’uscita sia elettricamente isolata dall’ingresso.
- Uscite multiple: il sistema può presentare uscite multiple, sia positive che negative, che possono differire per la loro tensione e corrente nominale; tali uscite possono essere isolate le une dalle altre.
In aggiunta a tali specifiche, obbiettivi tipici nella realizzazione di un alimentatore sono la riduzione delle dimensioni, del peso e del consumo di potenza, al fine di migliorare l’efficienza del sistema. In passato tale compito veniva affidato agli alimentatori a dissipazione, detti anche alimentatori lineari. Tuttavia i sempre crescenti miglioramenti nella tecnologia dei semiconduttori hanno portato alla realizzazione di alimentatori switching (o a commutazione) di dimensioni e peso sempre più ridotti e capaci di rendimenti migliori rispetto a quelli raggiungibili con gli alimentatori lineari.
1.2
Alimentatori lineari
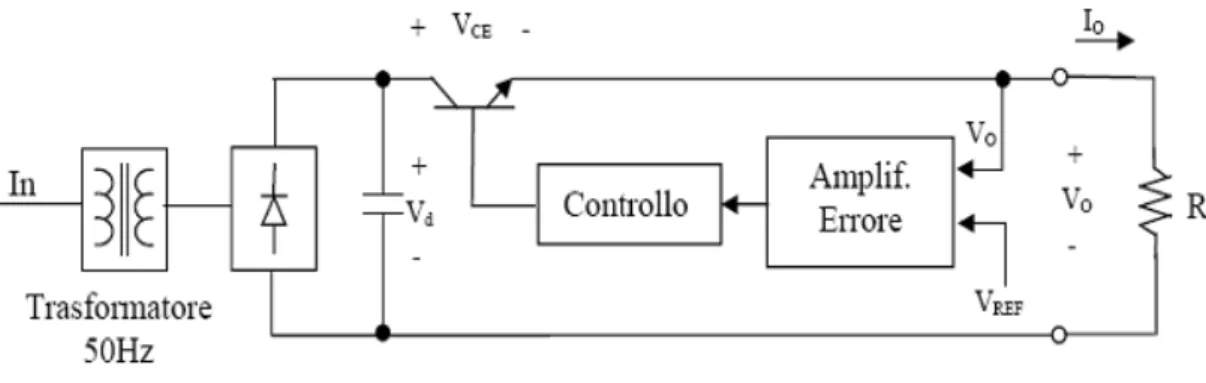
Per apprezzare i vantaggi degli alimentatori a commutazione, si considerino prima gli alimentatori lineari, il cui schema generale è mostrato in figura 1.0.
Figura 1.0: Schema di un alimentatore a dissipazione.
E’ necessario utilizzare un trasformatore a frequenza di rete, per abbassare la tensione d’ingresso, il cui valore tipico è 120 [V] o 240 [V], e per isolare elettricamente ingresso e uscita.
Il raddrizzatore converte la corrente alternata (ac) in corrente continua
(dc). Il condensatore di filtro riduce il ripple della tensione continua Vd.
La tensione raddrizzata e filtrata Vd ha l’andamento mostrato in figura
1.1.
Successivamente, vi è un transistor che lavora in regione attiva. Dal
confronto tra VO e la tensione di riferimento VREF, il circuito di controllo
regola la corrente di base del transistor in modo da ottenere l’uguaglianza tra VO (VO = Vd + VCE) e VREF. In pratica, il transistor
agisce come un resistore variabile dove la differenza di tensione (VO -
Vd) tra l’ingresso e l’uscita desiderata applicata al transistor causa in esso
delle perdite di potenza.
Per minimizzare le perdite del transistor, il rapporto spire del trasformatore deve essere scelto in modo tale che il valore minimo della Vd sia di poco più grande di VO, ovvero non la superi di un margine troppo ampio. Da quanto detto, si nota che i maggiori inconvenienti di un alimentatore a dissipazione sono:
- La necessità di utilizzare un trasformatore a bassa frequenza (50 o 60Hz). Tali trasformatori sono di grandi dimensioni e pesanti se confrontati con quelli che lavorano ad alta frequenza.
- Il transistor lavora in zona attiva per cui dissipa una certa potenza. A causa di ciò i rendimenti globali degli alimentatori lineari sono compresi in un intervallo tra 30% e 60%.
D’altronde, per quanto riguarda gli aspetti positivi, questi alimentatori utilizzano semplici circuiti elettronici e quindi per potenze nominali basse (< 25W) possono avere costi minori. Inoltre, non producono grandi effetti di interferenza elettromagnetica (EMI) con altri apparati.
1.3
Alimentatori a commutazione
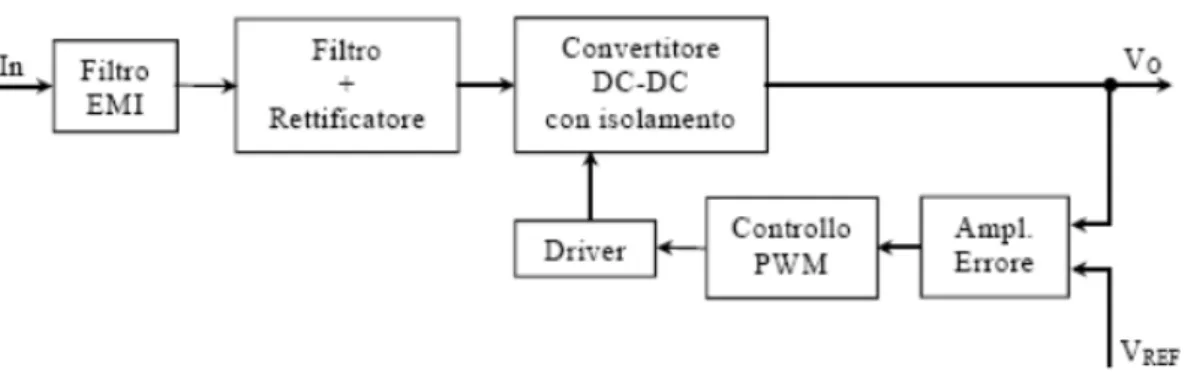
Negli alimentatori a commutazione la trasformazione della tensione continua da un livello ad un altro è realizzata attraverso i convertitori DC-DC. Questi circuiti utilizzano dispositivi allo stato solido (BJT, MOSFET, …) in cui funzionamento è assimilabile a quello di un interruttore (switch), cioè o completamente spento o completamente acceso. Quindi, poiché tali dispositivi non lavorano in regione attiva, si ha una notevole diminuzione della potenza dissipata. Grazie alle moderne tecnologie microelettroniche a larghissima scala di integrazione, si sono ottenuti dispositivi allo stato solido in grado di commutare velocemente grandi valori di tensione e corrente con un costo relativamente basso. Tali fattori hanno contribuito al successo degli alimentatori switching. La figura 1.2 mostra lo schema di principio di un alimentatore a commutazione. La tensione d’ingresso alternata è raddrizzata in una tensione continua non regolata tramite un raddrizzatore a diodi. Si noti che un filtro EMI è posto sull’ingresso per prevenire che l’interferenza elettromagnetica si propaghi. Il convertitore DC-DC provvede a trasformare la tensione continua non regolata al suo
ingresso in una tensione continua VO diversa dalla precedente. Tale
tensione è regolata attraverso un controllo a retroazione di tipo PWM, in cui la tensione di controllo è confrontata con un’onda a dente di sega alla frequenza di commutazione.
L’isolamento elettrico nel loop di controllo è realizzato tramite un trasformatore ad alta frequenza o un accoppiatore ottico.
Figura 1.2: Schema di un alimentatore a commutazione.
Da quanto detto, si nota come i vantaggi degli alimentatori a commutazione siano i seguenti:
- I dispositivi a commutazione operano come degli interruttori evitando il funzionamento in zona attiva, riducendo quindi drasticamente la potenza dissipata e portando l’efficienza tra il 70% ed il 90%.
- Viene utilizzato un trasformatore ad alta frequenza. Tali trasformatori sono meno pesanti e di dimensioni minori rispetto ai trasformatori a frequenza di rete utilizzati negli alimentatori lineari.
Riguardo gli aspetti negativi tali alimentatori risultano molto più complessi e, inoltre, bisogna ricorrere ad opportuni accorgimenti per prevenire le interferenza elettromagnetiche (EMI) dovute all’alta frequenza di commutazione.
1.4 Convertitori DC-DC a commutazione
I convertitori DC-DC sono generalmente usati negli alimentatori stabilizzati a corrente continua e negli azionamenti per motori in corrente continua. Spesso l’ingresso di questi convertitori è una tensione continua non regolata ottenuta raddrizzando la tensione di linea. I convertitori DC-DC a commutazione sono impiegati per trasformare la tensione continua d’ingresso non regolata in una tensione regolata al livello desiderato. I principali convertitori DC-DC a commutazione sono:
- Convertitore Buck o step-down - Convertitore Boost o step-up - Convertitore Buck-Boost - Convertitore Cùk
- Convertitore a ponte
Di questi convertitori elencati, solo il buck e il boost sono le tipologie di riferimento.
Il buck-boost e il cùk sono una combinazione delle due tipologie di riferimento e il convertitore a ponte deriva dal convertitore buck.
Nei convertitori DC-DC, la tensione media di uscita deve essere controllata in modo da eguagliare il livello di tensione desiderato, sebbene la tensione d’ingresso e il carico possano variare. Tali convertitori utilizzano uno o più interruttori per trasformare la tensione da un livello all’altro, per cui la tensione media d’uscita è controllata
attraverso la durata del tempo di accensione (tON) e di spegnimento (tOFF)
degli stessi interruttori.
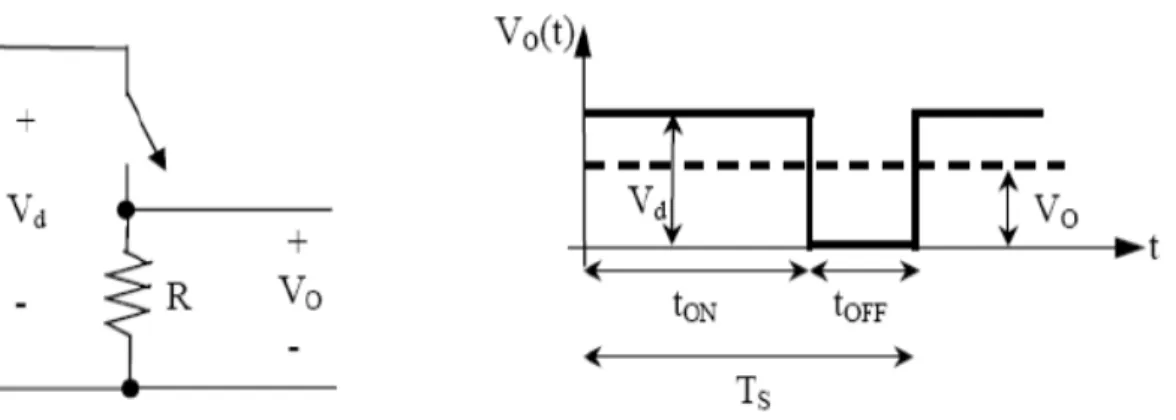
Per illustrare tale concetto, si fa riferimento alla figura 1.3, in cui si considera un convertitore DC-DC basilare.
Figura 1.3: Conversione DC-DC a commutazione.
Il valore medio VO della tensione di uscita VO(t), dipende da tON e da
tOFF. Uno dei metodi per controllare la tensione di uscita impiega per la
commutazione una frequenza costante pari a 1/TS (con TS = tON + tOFF) e
regola la durata della chiusura dell’interruttore per ottenere la giusta VO.
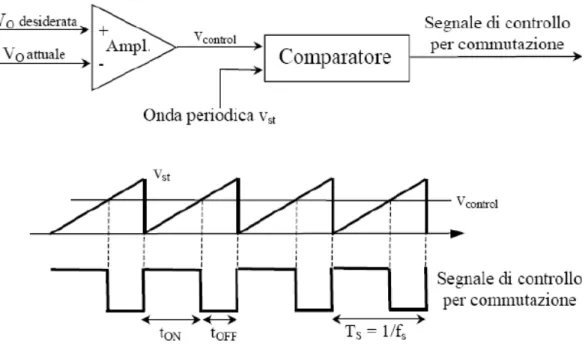
Tale metodo è chiamato modulazione a larghezza d’impulso PWM (Pulse Width Modulation). In questo modo, il rapporto D tra il tempo di accensione e il periodo di commutazione, detto duty cycle, è variabile. Un altro metodo di controllo più generale è ottenuto facendo variare la frequenza di commutazione e mantenendo costante il tempo di accensione o il tempo di spegnimento (Pulse Frequency Modulator). Anche in tal caso, si ottiene un duty cycle variabile. Nella commutazione con frequenza costante (PWM) il segnale di comando dell’interruttore viene generato confrontando una tensione di controllo Vcontrol con un’onda periodica, come mostrato in figura 1.4.
Figura 1.4: Modulatore PWM schema a blocchi e forme d'onda.
Di solito la tensione del segnale di controllo è ottenuta amplificando l’errore, cioè la differenza tra la tensione reale d’uscita e il suo valore di
riferimento. La frequenza dell’onda periodica (dente di sega) Vst
stabilisce la frequenza di commutazione del convertitore, solitamente compresa in un range che va da qualche kHz a poche centinaia di kHz.
Quando Vcontrol, che varia molto più lentamente rispetto alla frequenza di
commutazione, è più grande di Vst, il segnale che controlla la
commutazione dell’interruttore diventa alto, causandone l’accensione, e viceversa lo spegnimento. Supposto che il dente di sega abbia un valore
di tensione di picco pari a Vst, il duty cycle D può essere così espresso:
Vst Vcontrol T t D S O = = (1.1) I convertitori DC-DC possono avere due distinti modi di funzionamento: - Continuo (Continuous Conduction Mode – CCM)
- Discontinuo (Discontinuous Conduction Mode – DCM)
1.5 Il convertitore boost
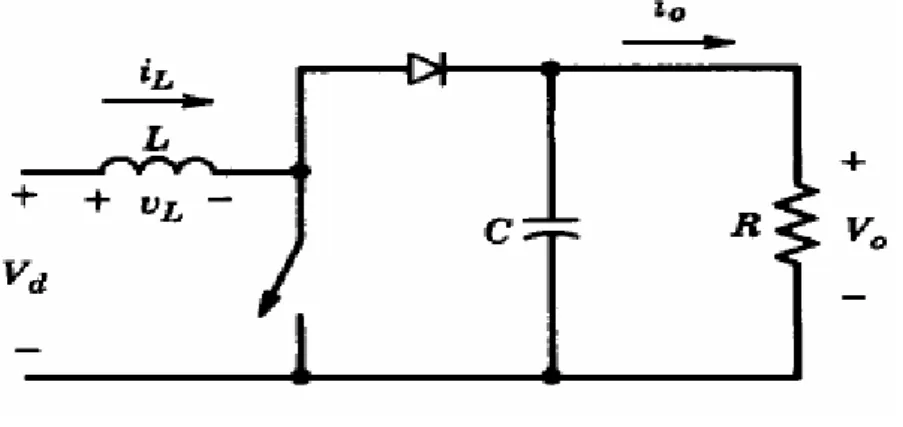
In figura 1.5 è mostrato lo schema circuitale di un convertitore elevatore (boost). La sua principale applicazione riguarda gli alimentatori stabilizzati in continua e la frenatura con recupero d’energia dei motori a corrente continua.
Come indica la denominazione, la tensione d’uscita è sempre più grande di quella d’ingresso.
Figura 1.5: Convertitore DC-DC elevatore.
Quando l’interruttore è chiuso il diodo è polarizzato inversamente, la sezione d’uscita, costituita dal parallelo tra il condensatore e il resistore, è isolata e l’ingresso fornisce energia all’induttore. La resistenza R viene alimentata dalla carica immagazzinata sul condensatore C. Quando l’interruttore è aperto, la sezione d’uscita riceve energia sia dall’induttore sia dall’ingresso. Nell’analisi in regime permanente qui presentata si suppone che il condensatore abbia una capacità così elevata da assicurare che la tensione d’uscita sia costante:vO(t)≅VO.
Si ha il funzionamento in modo continuo se il valor medio della corrente che scorre nell’induttore è maggiore della metà dell’ondulazione della componente alternata. In tale caso la corrente nell’induttore non si annulla mai durante il periodo di commutazione ed il suo nucleo
mantiene parte dell’energia elettromagnetica immagazzinata. Si ha, invece, il funzionamento in modo discontinuo se il valor medio della corrente che scorre nell’induttore è minore della metà dell’ondulazione della componente alternata. In questo modo, l’energia immagazzinata nel nucleo dell’induttore si scarica completamente, per cui la corrente nell’induttore si annulla dopo un certo intervallo di tempo all’interno di ogni periodo di commutazione.
1.5.1 Modalità di conduzione continua (CCM)
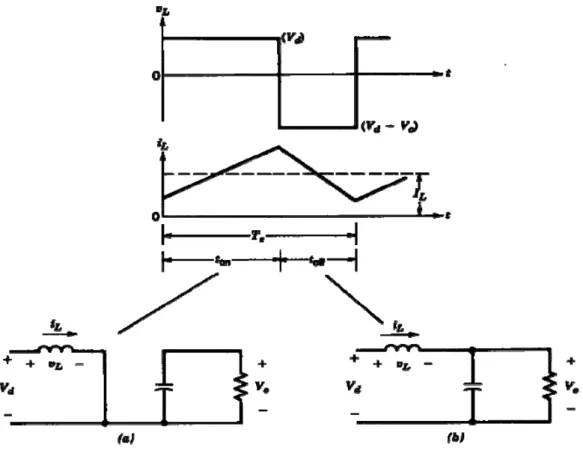
In figura 1.6 sono mostrate le forme d’onda in regime permanente per la modalità di conduzione continua (Continuous Conduction Mode o CCM), nella quale la corrente nell’induttore scorre senza discontinuità (IL(t) > 0)
.
Dato che in regime permanente l’integrale della tensione dell’induttore in un periodo deve essere uguale a zero, si ha:
0 ) ( − ⋅ = + ⋅ O d O OFF d t V V t V
Dividendo entrambi in membri per Ts e riordinando i termini si ottiene
D T T V V OFF S d O − = = 1 1
Supponendo il circuito privo di perdite, si ha P =d PS
O O d d I V I V ⋅ = ⋅ Segue che: ) 1 ( D I I d O = − (1.2)
Figura 1.6: Modalità di conduzione continua: (a) interruttore chiuso, (b) interruttore aperto.
1.5.2 Confine tra conduzione continua e discontinua
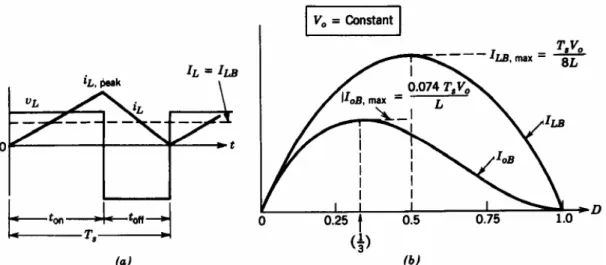
La figura 1.7a mostra le forme d’onda al limite della conduzione
continua. Per definizione, in questa modalità la corrente iL si annulla alla
fine dell’intervallo di apertura. Il valore medio della corrente nell’induttore in questa situazione di confine è:
) 1 ( 2 2 1 2 1 , D D L V T t L V i I S O O d picco L LB = ⋅ = ⋅ ⋅ = − (1.3)
Ricordando che in un convertitore boost la corrente nell’induttore e
quella di ingresso sono uguali (i =d iL), e usando le equazioni 1.2 e 1.3 si
trova che il valore medio della corrente d’uscita al confine della
conduzione continua è: 2 ) 1 ( 2L D D V T I S O OB = −
Di solito le applicazioni nelle quali è usato un convertitore elevatore richiedono che VO sia tenuta costante. Quindi, con VO costante, IOB è rappresentata nel grafico della figura 1.7b in funzione del suo duty cycle D. Con Vo costante, la variazione del duty cycle implica la variazione della tensione d’ingresso.
Figura 1.7: Convertitore elevatore DC-DC al confine della conduzione continua-discontinua.
La figura 1.7b mostra che ILB raggiunge il valore massimo quando
D=0.5. Si ha: L V T I S O LB 8 max , =
Inoltre, IOB ha il suo massimo quando D=1/3=0.333:
L V T L V T I S O S O OB 0.074 27 2 max , = = (1.4)
Con riferimento ai loro valori massimi, ILB e IOB possono essere espresse
come max , ) 1 ( 4 LB LB D D I I = − max , 2 ) 1 ( 4 27 OB OB D D I I = −
La figura 1.7b mostra che per un dato D, con Vo costante, se la corrente media nel carico scende sotto IOB (e, perciò, quella nell’induttore sotto
ILB) la conduzione della corrente diventa discontinua.
1.5.3 Modalità di conduzione discontinua (DCM)
Per comprendere la modalità di conduzione discontinua della corrente (Discontinuous Conduction Mode o DCM), si supponga che per una
diminuzione della potenza d’uscita Vd e D rimangano costanti (sebbene,
in pratica, D dovrebbe variare per tenere VO costante).
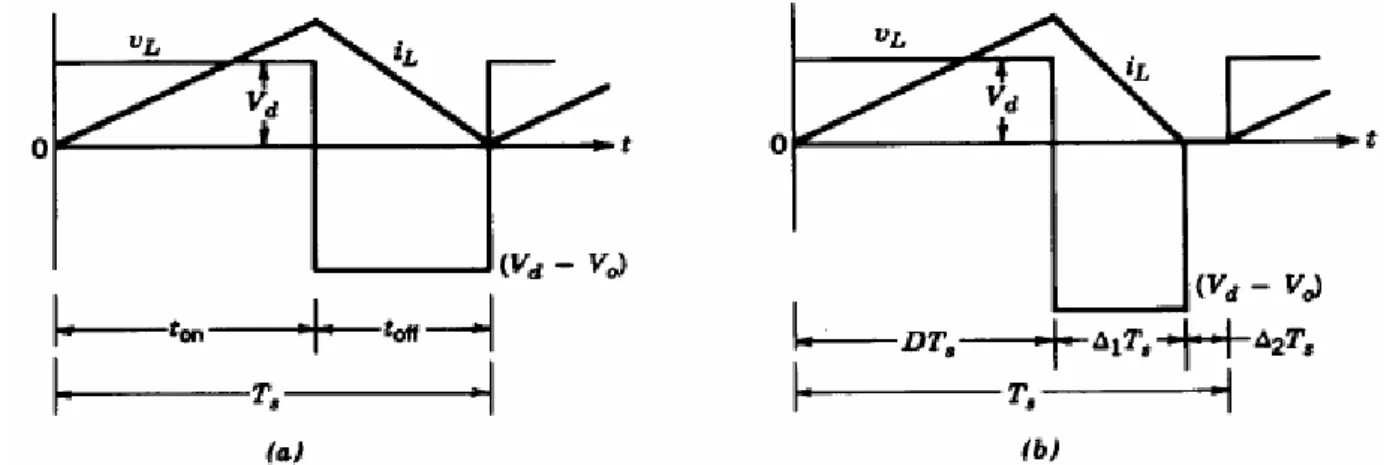
La figura 1.8 confronta le forme d’onda al confine della conduzione
continua e discontinua, nell’ipotesi che Vd e D siano costanti.
Nella figura 1.8b, la conduzione discontinua della corrente avviene in
conseguenza di una diminuzione di PO = (Pd) e, quindi, di un più basso
valore di IL = (Id), poiché Vd è costante.
Poiché nella figura 1.8 iL,picco è la stessa per entrambe le modalità, un valore più basso di IL (e, quindi, una iL discontinua) è possibile solo se
VO cresce nella figura 1.8b.
Figura 1.8: Forme d'onda in un convertitore elevatore DC-DC: (a) al confine della conduzione continua -discontinua, (b) in conduzione discontinua.
Se si eguaglia a zero l’integrale della tensione dell’induttore esteso a un periodo si ha: 0 ) ( − ∆1 = + d O S S dDT V V T V 1 1 ∆ + ∆ = D V V d O
(1.5) D I I d O + ∆ ∆ = 1 1
(poiché P d = PO) (1.6)
Il valore medio della corrente d’ingresso, che è anche uguale a quello dell’induttore,è: ) ( 2 +∆1 = DT D L V Id d S
Usando l’equazione 1.6 in quella precedente si ottiene:
1 2 ∆ = D L V T I S d O (1.7)
In pratica, poiché VO è tenuto costante e D varia in risposta alle
variazioni di Vd, è molto più utile ottenere il duty cycle D richiesto in
funzione della corrente nel carico per differenti valori di VO/Vd.
Usando le equazioni 1.5, 1.7 e 1.4 si ottiene:
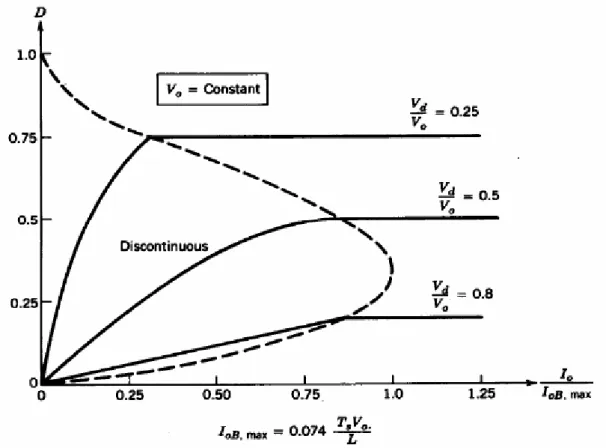
max , 1 27 4 OB O d O d O I I V V V V D − =
Nel grafico della figura 1.9, D è rappresentato in funzione di IO/IOB,max per differenti valori di Vd/VO. Il confine fra la conduzione continua e quella discontinua è indicato dalla curva tratteggiata. Nella modalità
discontinua, se VO non è controllata durante ogni periodo di
commutazione, almeno la seguente energia
L DT V i L d S picco L 2 ) ( 2 2 2 , = [W*s]
viene trasferita dall’ingresso al condensatore in uscita e al carico. Se il
del condensatore cresce fino a quando si stabilisce una situazione di equilibrio energetico.
Figura 1.9: Caratteristiche di un convertitore elevatore tenendo Vo costante.
Se il carico diventa molto basso, l’incremento di VO può causare la
1.5.4 Effetti degli elementi parassiti
In un convertitore elevatore gli elementi parassiti sono dovuti alle perdite associate all’induttore, al condensatore, all’interruttore e al diodo.
In particolare in un induttore le perdite di potenza sono di tre tipi 1) Perdite dovute alla resistenza in DC dell’induttore:
(
2)
RMS DC
DC
R
I
P
=
⋅
, con RDC = resistenza in DC dell’induttore.2) Perdite dovute alla resistenza in AC dell’induttore:
(
P
AC=
R
AC⋅
I
RMS2)
, con RDC = resistenza in DC dell’induttore.3) Perdite dovute all’isteresi e alle correnti di perdita nel nucleo:
(
e)
y x
core
K
f
B
V
P
=
1⋅
⋅
⋅
,con:K1 = costante che dipende dal materiale del nucleo.
f = frequenza.
B = Densità di picco del flusso magnetico.
x = coefficiente che dipende dal materiale del nucleo. y = coefficiente che dipende dal materiale del nucleo.
Ve = Volume effettivo del nucleo.
Quindi le perdite totali sono date dalla somma dei tre contributi:
CORE AC
DC
LOSS
P
P
P
P
=
+
+
Inoltre le perdite dovute alla resistenza in AC (PAC) dell’induttore sono trascurabili rispetto agli altri due contributi.
Considerando solo le perdite dovute alla resistenza parassita
dell’induttore e indicando con RL la resistenza in DC dell’induttore, si
ottiene una relazione tra il rapporto di trasformazione
(
V /O Vd)
e il dutycycle, al variare di RL /R, la cui dimostrazione esula dai contenuti di
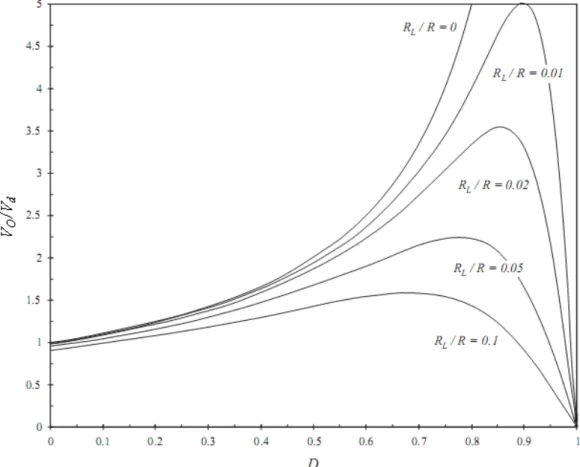
− ⋅ + ⋅ − = 2 ) 1 ( 1 1 1 1 D R R D V V L d O
Il relativo grafico di figura 1.10, mostra che vi è una forte limitazione sul massimo rapporto di trasformazione raggiungibile, dovuta alla resistenza parassita dell’induttore.
Per esempio con
= 02 .. 0 R RL
il massimo rapporto di trasformazione
d O V V
è circa 3.5. Se si vuole ottenere un rapporto pari a 5 bisognerebbe ridurre la resistenza parassita dell’induttore.
Figura 1.10: Effetti della resistenza parassita dell’induttore sul rapporto di conversione delle tensioni (convertitore elevatore).
Di conseguenza l’efficienza sarà elevata per bassi valori del duty cycle e viceversa, come indicato nella seguente relazione, la cui dimostrazione esula nuovamente dai contenuti di questa tesi:
2 ) 1 ( 1 1 D R RL − ⋅ + = η
Il grafico di figura 1.11 conferma quanto detto finora.
Figura 1.11: Effetti della resistenza in DC dell’induttore sull’efficienza (convertitore elevatore).
1.5.5 Ondulazione della tensione d’uscita
Il valore picco-picco dell’ondulazione della tensione d’uscita può essere calcolato considerando le forme d’onda mostrate nella figura 1.12 per una modalità di funzionamento continuo.
Supponendo che tutta l’ondulazione della corrente del diodo iD circoli
nel condensatore e che il valore medio di iD circoli nel carico resistivo,
l’area tratteggiata della figura 1.12 rappresenta la carica ∆Q. Quindi il valore picco-picco dell’ondulazione di tensione è dato da
C DT R V C DT I C Q V O S O S O = = ∆ = ∆ , quindi τ S S O O DT RC DT V V = = ∆
Dove τ =RC è la costante di tempo.
È quindi possibile, fissato il valore dell’ondulazione della tensione d’uscita, ricavare il valore della capacità che garantisce tale ondulazione:
R DT V V C S O O ∆ = (I.8)
1.5.6 Ondulazione della corrente d’ingresso
Il valore picco-picco dell’ondulazione della corrente d’ingresso può essere calcolato considerando le forme d’onda mostrate nella figura 1.13 per una modalità di funzionamento continuo.
Dalla relazione: dt di L v L L = , possiamo scrivere: S L L L DT i L t i L V = ∆ ∆ ∆ =
Dalle figure 1.13 e 1.5 v =L Vd , ∆t = DTS e ∆iL =Imax −Imin.
Fissato il valore dell’ondulazione di corrente che si vuole in ingresso è possibile ricavare il valore dell’induttanza L da utilizzare al fine di garantire tale ondulazione:
min , max , L L S d L L I I DT V V i t L − = ∆ ∆ =
Figura 1.13: Forme d'onda della tensione e della corrente nell'induttore in un convertitore boost in modalità di funzionamento continua
1.6 Architettura Interleaved
Tipicamente, per ridurre l’ondulazione di corrente, viene usata una configurazione di tipo interleaved, composta da più convertitori connessi in parallelo, in cui le fasi sono traslate opportunamente come mostra la figura 1.14:
Figura 1.14: Convertitore boost multifase: (a) diagramma a blocchi; (b) forme d’onda della corrente.
A causa dello sfasamento tra i diversi canali, le correnti di ogni singola fase, seguendo il proprio andamento, risultano diverse in qualsiasi istante. Ciò provoca, oltre la riduzione dell’ondulazione di corrente, anche un incremento della frequenza effettiva della commutazione.
Figura 1.15: Convertitore boost multifase
Per procedere all’analisi di un convertitore boost multifase, bisogna assumere che tutte le fasi siano traslate nel tempo e che la corrente sia equamente fornita dalle singole fasi in condizione di regime (steady-state condition). Durante le variazioni di carico, invece, i MOSFET di tutti i canali devono commutare simultaneamente così da provvedere più velocemente alla richiesta di corrente da parte del carico, migliorando la risposta al transitorio.
Dal punto di vista analitico, tale configurazione può essere vista come un convertitore boost a singola fase (single-ended).
Si suppone, inoltre, che ogni canale del convertitore interleaved abbia un
induttore di valore L1, che operi alla frequenza di commutazione fS
(periodo TS ) ed abbia un’ondulazione di corrente IL sull’induttore. Si può mostrare come la corrente totale, somma delle correnti sugli
induttori e attraversante il capacitore di uscita, in condizione di regime, sia equivalente alla corrente erogata da un convertitore boost a
singola fase avente i seguenti parametri:
• Deq =n⋅D • fS,eq =n⋅ fS • n T TS,eq = S • n L Leq = 1 • n V Vin,eq = in • D D n I I L L − ⋅ − ∆ = ∆ 1 ) 1 (
Le forme d’onda delle correnti per un convertitore boost a due fasi sono mostrate in figura 1.16.
Nel circuito seguente, la presenza dei due diodi schotthy è giustificata dal fatto che si vuole una diminuzione della dissipazione di potenza sul componente.
Figura 1.16: Andamento delle correnti di un convertitore boost a due fasi sfasate di 180°.
La figura precedente mostra che facendo agire i due interruttori S1 e S2 in
opposizione di fase, si ottiene che le ondulazioni delle correnti sui due induttori risultano sfasate di 180°, e quindi, supponendo di avere un duty
cycle D=50% , si ha anche la cancellazione dell’ondulazione della corrente in ingresso.
Si vede anche che il circuito offre una riduzione dell’ondulazione della corrente del condensatore di uscita ed in particolare questo si viene ad annullare per i valori di duty cycle 0, 50, 100%.
Questi ultimi due aspetti sono chiariti dalla figura 1.17 e 1.18.
Figura 1.17: Andamento del rapporto tra l’ondulazione della corrente di ingresso, e l’ondulazione della corrente dell’ induttore, indicato con K(D) al
variare del duty cycle D.
Figura 1.18: Andamenti dell’ondulazione della corrente del condensatore di uscita nel convertitore boost a singola fase e a due fasi.
Un convertitore interleaved allora può essere considerato come un convertitore a singola fase, ma a frequenza di commutazione più alta, con una tensione di ingresso più bassa e un induttore di valore minore, e una minore ondulazione della tensione di uscita.
Quanto detto vale soltanto se tra le fasi si ha un buon current sharing (divisione equa della corrente tra le fasi) sia in condizioni di regime che in quelle dinamiche.
Supponendo di non variare l’ondulazione di corrente desiderata, e spinti dalla necessità di ridurre sensibilmente il costo del convertitore, si cerca di migliorare l’efficienza dello stesso usando una configurazione interleaved con 4 fasi.
In questo convertitore la corrente che scorre in ogni fase risulta essere un quarto della corrente che scorre nella configurazione single-ended, e questo porta ad avere induttori di dimensioni e costi minori.
Infatti l’energia dissipata su ogni induttore in una generica configurazione ad n fasi vale:
∑
=
=
n K erleavedn
I
L
n
E
1 2 int2
1
)
(
mentre la riduzione dell’energia dissipata vale:
100 1 1 ) ( Re _ % 1 2 × − =
∑
= n K n n duction EnergyFigura 1.19: Riduzione percentuale dell’energia negli induttori in una configurazione interleaved n
Quindi in un boost interleaved-4, l’energia dissipata sugli induttori è il 75% in meno rispetto ad una configurazione single-ended e conseguentemente si possono scegliere per l’applicazione induttori di dimensioni minori.
Altro motivo per il quale si preferisce scegliere una interleaved, rispetto a quella single-ended, è il fatto di avere un miglioramento dell’efficienza; infatti per una configurazione single-ended si ha una
perdita in conduzione che vale:
P
single=
R
⋅
I
2,mentre nella configurazione interleaved-4 si ha la seguente perdita in conduzione: 2 2 2 2 2 4
4
4
4
4
4
I
R
I
R
I
R
I
R
I
R
P
phase
=
⋅
⋅
+
⋅
+
⋅
+
⋅
=
Quindi nella configurazione interleaved si ha il 75% in meno di perdita di potenza in conduzione.