Cap. 3
Modellazione
della
Macchina
e Controllo
39 3 - 1
Determinazione del Modello di Macchina
Il presente studio vuole analizzare il comportamento di una macchina brushless a magneti permanenti da proporre sul mercato a basso costo. A tal fine si è pensato di utilizzare una macchina con un basso numero di cave per polo e per fase, materiale magnetico dal basso costo e con una semplice distribuzione di magnetizzazione.
In particolare la macchina scelta è trifase e presenta una struttura bipolare, con numero di cave per polo e per fase q=2, e avvolgimento a passo raccorciato (con raccorciamento necessariamente di una cava), mentre il rotore ha una struttura a magneti interni, tale per cui la distribuzione della forza magneto-motrice equivalente è simile a quella caratteristica di un brushless trapezoidale.
La figura seguente riporta un settore angolare di statore, in cui sono evidenziate la forma dei denti e delle cave, e all’interno di queste le aree occupate dalle matasse degli avvolgimenti e dall’isolante.
Figura 3.1 – Sezione dello statore di macchina
Le principali caratteristiche ipotizzate per il motore esaminato sono riportate nella seguente tabella
lunghezza assiale l 100 mm
raggio esterno giogo rotorico rR 42,5 mm
lunghezza magnetizzazione magneti
ξ
M 3 mmampiezza traferro
ξ
A 0,7 mmraggio interno giogo statorico rS 43,2 mm
momento d'inerzia JMot 0.035 Nm 2
campo coercitivo plastoferriti HC 160 kA/m Tabella 3.1 – Caratteristiche del motore
Per semplicità nella trattazione del modello, si assumerà nullo il livello di saturazione del ferro che costituisce il pacco statorico; sotto tale ipotesi è possibile trascurare le cadute di tensione magnetica nel ferro stesso, semplificazione possibile in quanto non ci sono conduttori completamente abbracciati dal materiale ferromagnetico, cioè il numero di attraversamenti è tale che la corrente totale abbracciata dal ferro (che è la somma delle tre correnti di fase) sia nulla.
Inoltre, si trascureranno anche le perdite per correnti parassite e isteresi, considerando come unico elemento dissipativo le resistenze elettriche degli avvolgimenti statorici.
Magneti Permanenti
Per semplicità realizzativa, e quindi minor costo, i magneti permanenti presenti nella macchina non hanno distribuzione sinusoidale bensì costante a tratti, similmente a quelli usati per i brushless DC. In particolare ogni polo presenta un tratto orizzontale di estensione 70° elettrici e due tratti di raccordo, ciascuno ampio 10° elettrici. La distribuzione completa RFM, avendo la macchina 2 coppie
polari, è riportata nella figura seguente.
Figura 3.2 – Distribuzione della forza magneto-motrice a vuoto
In fase di creazione del modello si è calcolata la scomposizione armonica di tale distribuzione (che presenta unicamente le armoniche dispari in coseno) e si è deciso di considerare soltanto le prime 11 armoniche di tale scomposizione, ottenendo comunque un’ottima approssimazione della funzione reale.
41 F1 1,2586 F11 -0,0178 F3 -0,382 F13 0,0023 F5 0,1885 F15 0,0042 F7 -0,0981 F17 -0,0053 F9 0,0472 F19 0,0037 Armomiche della RFM (β)
Tabella 3.2 – Componenti armoniche della forza magneto-motrice
Il materiale scelto per costruire i magneti permanenti della macchina è la plastoferrite, che presenta un valore di campo coercitivo Hc=160 kA/m e una permeabilità relativa µr=1,03. La lunghezza di
magnetizzazione dei magneti utilizzati è pari a εM=3 mm, dunque si ottiene che il modulo della
forza magneto-motrice è pari a Fc=480 A. Il comportamento magnetico di tali magneti verrà
supposto lineare, cioè la permeabilità differenziale degli stessi è costante al variare della forza magneto-motrice cui è sottoposto il materiale.
Rotore e Descrizione del Traferro
La macchina presenta, come detto, una struttura a magneti interni posizionati in vani ricavati nel rotore, come rappresentato in figura.
Figura 3.3 – Struttura del rotore della macchina
Sono evidenziati i magneti permanenti, con le relative direzioni di magnetizzazione, e gli elementi antimagnetici di blocco
La diversa permeabilità relativa della plastoferrite, del materiale antimagnetico di blocco e del ferro che costituisce il pacco rotorico comporta però un’anisotropia di carattere magnetico, dovuta alla diversa riluttanza che le linee di flusso incontrano al variare della posizione rotorica.
Tale comportamento variabile è esprimibile per mezzo della funzione
( )
( )
( )
β ε( )
β( )
( )
ββ µµ( )
β ε β β ξ M R M R A R M R A R A R R r r r 0 + = (3.1)dove εA e εM sono i valori (relativi alla posizione β) delle ampiezze del traferro e dello strato
equivalente di magneti (supposto disposto lungo tutta la periferia di rotore) e rA e rM il valore del
raggio valutato alle mezzeria del traferro e di questo strato equivalente di magneti.
Sviluppando in serie di Fourier l’espressione precedente si ricava che la funzione descrittiva del traferro vale, arrestandosi alla seconda armonica:
43
( )
β ξ ξ cos( )
2pβ ξ 0 2 R = + ⋅ (3.2) con 0ξ=12 e 2ξ=0,9* 0ξ=10,8. AvvolgimentiLa macchina presenta due cave per polo e per fase ed un avvolgimento in doppio strato a passo raccorciato. La scelta del passo raccorciato è stata effettuata con l’obiettivo di annullare le componenti di terza armonica del flusso prodotto dai magneti permanenti.
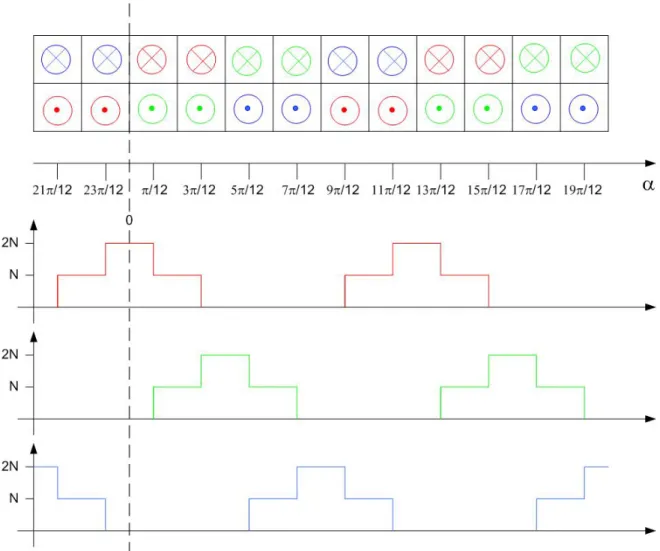
Essendo le matasse disposte in cave semichiuse con piccola apertura, ai fini dell’analisi della macchina la loro effettiva dimensione angolare può essere trascurata, in quanto l’effetto di ciascuna matassa può essere approssimativamente rappresentato attraverso un corrispondente gruppo di conduttori filiformi disposti sul profilo interno del pacco statorico in corrispondenza della mezzeria dell’apertura di cava. Per il generico gruppo di conduttori h appartenente alla fase k, le caratteristiche essenziali sono quindi costituite dal numero di conduttori che lo compone Nkh
(convenzionalmente assunto positivo se vengono percorsi dalla relativa corrente in verso uscente dal piano d’osservazione, negativo altrimenti) e dalla loro posizione angolare αkν, rispetto ad un
sistema di riferimento angolare arbitrariamente assunto e solidale allo statore. La funzione sNk che
descrive la distribuzione degli avvolgimenti, sarà quindi costituita da gradini aventi ampiezza Nkh e
discriminante pari a αkν.
La figura seguente riporta in alto una raffigurazione lineare dello statore e della dislocazione degli avvolgimenti nelle cave, mentre in basso è disegnata la funzione sN
Figura 3.4 – Disposizione delle matasse di conduttori nelle cave, definizione di un sistema di riferimento statorico e funzioni SN
k per le tre fasi
Nel presente lavoro l’analisi viene condotta non limitandosi alla prima armonica di tali funzioni, bensì utilizzandone l’andamento reale, dato che la formula che le descrive
( )
∑
[
]
= − = nK 1 ν kν kν k SN α N uα α (3.3)45
Resistenza
La resistenza degli avvolgimenti viene calcolata da una stima della lunghezza del rame e della sezione di ogni spira.
Ogni cava presenta un’area disponibile per il rame di 100 mm2, con fattore di riempimento pari a kCu=0.7, per una sezione effettiva del rame di 70 mm2. La sezione di ogni spira è dunque pari a
N k A A Cu Cu spira ⋅ = (3.4)
Essendo il numero di conduttori di ciascuna matassa pari a N=120, risulta Aspira=0.583 mm2.
La lunghezza media di ogni singola spira è pari a
(
c)
spira 2 l
l = ⋅ +τ (3.5)
dove l è la lunghezza assiale del pacco statorico (100 mm) e τc la lunghezza media dei raccordi alle
testate (89,5 mm), misurata considerando come se ogni spira, posizionata indifferentemente nello strato inferiore o superiore della cava, fosse ipoteticamente collocata all’altezza del raggio medio di cava: ciò è valido dal momento che ogni fase presenta delle matasse sia sul fondo della cava che vicino all’apertura.
Ricordando che per ogni fase si hanno due coppie di matasse, e che la lunghezza lspira
precedentemente ricavata vale per una singola spira ed è stata misurata percorrendo una sola coppia polare, si calcola che la resistenza totale della macchina, per ogni singola fase, è
Ω = ⋅ ⋅ ⋅ ⋅ = 5.586 A l N p 2 R spira spira Cu ρ (3.6)
Dall’analisi magnetica lineare di macchine rotanti a tamburo lungo (paragrafo 1 - 2), fatta in funzione della posizione rotorica e delle funzioni descrittive degli avvolgimenti sNk, della forza
magneto-motrice sFM e del traferro Sξ, si ottengono le funzioni che forniscono il flusso a vuoto e le
induttanze di macchina
( )
( )
( )
( )
( )
( )
( )
( )
( )
⋅ ⋅ ⋅ − ⋅ ⋅ =∫
∫
∫
∫
2π 0 S 2π 0 M S S 2π 0 k S S M S 2π 0 k S S 0 0 k dα γ α, ξ dα γ α, F γ α, ξ dα α N γ α, ξ dα γ α, F α N γ α, ξ l µ γΨ
(3.7)( )
( )
( )
( )
( )
( )
( )
( )
( )
⋅ ⋅ ⋅ − ⋅ ⋅ =∫
∫
∫
∫
2π 0 S 2π 0 h S S 2π 0 k S S h S 2π 0 k S S 0 h k, dα γ α, ξ dα α N γ α, ξ dα α N γ α, ξ dα α N α N γ α, ξ l µ γL
(3.8)Utilizzando le espressioni ricavate precedentemente e sviluppando i calcoli, si ottengono i risultati di seguito riportati, espressi per compattezza tramite le funzioni che rappresentano una terna diretta
( )
[
( )
(
)
(
)
]
T 3 4 3 2 cos p p cos p cos pγ γ γ π γ π σ = − − (3.9)e le armoniche superiori di detta terna
(
)
[
(
)
(
(
)
)
(
(
)
)
]
T 3 4 3 2 cos m* p p * m cos p * m cos p m, γ γ γ π γ π σ = − − (3.10)Induttanza Principale di Macchina
( )
( )
( )
( )
( )
(
)
(
)
(
)
(
)
(
)
− − ⋅ + − − ⋅ + ⋅ = 3 4 3 2 P 4 3 4 3 2 P 2 3 4 3 2 P 0 P p , 4 p , 4 p , 4 L p p p L 0 LL
π π π π π π γ σ γ σ γ σ γ σ γ σ γ σ σ σ σ γ (3.11) dove valgono: H 0747 . 0 16 3 9 10 N l L 0 2 2 0 2 0 P 0 = − ⋅ ⋅ = π ξ ξ π ξ µ (3.12) H 0282 . 0 3 6 5 N l L 2 2 0 P 2 =µ ⋅ ⋅ ξ = (3.13)47 H 10 05 . 1 16 3 N l L 3 0 2 2 2 0 P 4 =− ⋅ ⋅ =− ⋅ − π ξ ξ µ (3.14)
Come si può notare, l’analisi con cui si è scelto di rappresentare la macchina, a differenza di quella arrestata alla prima armonica delle diverse funzioni di distribuzione, porta a considerare anche un’induttanza con variabilità 4 volte l’angolo elettrico, induttanza altrimenti non rinvenibile; i valori assoluti delle stesse induttanze, inoltre, sono diversi da quelli calcolabili con l’analisi di più consueto riferimento.
L’induttanza di dispersione, infine, è stata valutata essere pari a LL=10 mH
Flussi e Vettore delle Tensioni a Vuoto
( )
γ ψ σ( )
pγ ψ σ(
5,pγ)
ψ σ(
7,pγ)
ψ σ(
11,pγ)
13ψM σ(
13,pγ)
M 11 M 7 M 5 M 1 0 = ⋅ + ⋅ + ⋅ + ⋅ + ⋅Ψ
(3.15)( )
(
)
(
( ))
( )(
)
(
( ))
( )(
2*13)
M 13 11 * 2 M 11 7 * 2 M 7 5 * 2 M 5 2 M 1 0 p , 13 ψ p 13 p , 11 ψ p 11 p , 7 ψ p 7 p , 5 ψ p 5 p ψ pM
π π π π π γ σ γ σ γ σ γ σ γ σ γ + ⋅ ⋅ + + ⋅ ⋅ + + ⋅ ⋅ + + ⋅ ⋅ + + ⋅ ⋅ = (3.16)Anche in questo caso, come era logico aspettarsi, il maggior numero di armoniche considerate nella funzione di distribuzione produce un maggior contenuto armonico nei vettori flusso e tensioni a vuoto, nonché un diverso valore delle componenti di tali funzioni, che vengono qui sotto riportate:
Wb 4307 . 0 F 2 1 F F 2 1 3 F N l ψ 2 3 0 1 2 1 C 0 M 1 = + + ⋅ ⋅ ⋅ ⋅ ⋅ =µ ξ ξ ξ (3.17) Wb 0014 . 0 F 2 1 F F 2 1 5 3 F N l ψ 2 7 0 5 2 3 C 0 M 5 =− + + ⋅ ⋅ ⋅ ⋅ ⋅ =µ ξ ξ ξ (3.18) Wb 10 965 . 2 F 2 1 F F 2 1 7 3 F N l ψ 2 4 9 0 7 2 5 C 0 M 7 =− ⋅ − + + ⋅ ⋅ ⋅ ⋅ ⋅ − = µ ξ ξ ξ (3.19) Wb 10 149 . 8 F 2 1 F 11 3 F N l ψ 2 5 9 0 11 C 0 M 11 =− ⋅ − + ⋅ ⋅ ⋅ ⋅ ⋅ − = µ ξ ξ (3.20) Wb 10 606 . 1 F 2 1 13 3 F N l ψ 2 4 11 C 0 M 13 =µ ⋅ ⋅ ⋅ ⋅ ξ =− ⋅ − (3.21)
Osservando le diverse componenti del flusso a vuoto si può constatare come siano assenti le armoniche di flusso di ordine 3 e multiple, che d’altronde si era scelto di eliminare attraverso l’accorgimento del raccorciamento di passo degli avvolgimenti statorici.
Anche in questo caso, il valore assoluto della prima componente di flusso (l’unica presente secondo il consueto sviluppo del modello) assume un valore diverso da quello calcolato arrestando le funzioni di distribuzione alla prima armonica significativa.
Determinazione dei Valori Nominali di Macchina
Date le caratteristiche della macchina, i valori nominali di tensione e corrente sono stati stabiliti seguendo il metodo sotto esposto:
• volendo mantenere una densità di corrente J inferiore ai 6 A/mm2, si può sollecitare la macchina
con una corrente di fase di ampiezza massima pari a 5 A di picco, dunque circa 3.5 A in valore efficace;
• alimentando il convertitore di tensione da una rete trifase in bassa tensione (400 V di tensione concatenata efficace), si ottiene un valor medio della tensione sul bus DC pari a circa 560 V; il valor massimo del lato dell’esagono di tensione prodotto dall’inverter, espresso nel sistema di riferimento di Park, è pari a 460 V [VCC/√(3/2)], ma volendo andare a lavorare sul cerchio
inscritto nell’esagono si ottiene un valore di tensione 400 V [VEX*√3/2]. Considerando, rispetto
a questa teorica tensione massima di alimentazione, un margine del 5% per ovviare a eventuali abbassamenti o buchi di tensione in rete, e un ulteriore 20% per avere un margine di tensione da sfruttare per il controllo dinamico, si ottiene una tensione massima di alimentazione pari a 300 V, espressa nel sistema di riferimento di Park, che corrispondono, trasformati nelle variabili di base, a 300 V di tensione concatenata efficace e a 245 V di tensione di picco di fase.
A partire da questi valori nominali di tensione e corrente, si calcola che la coppia massima producibile dalla macchina nel rispetto di tali vincoli è pari a CN=8.25 Nm, e può essere prodotta
fino alla velocità base Ωb=140 rad/s, pari a circa 1300 RPM. Oltre tale velocità, per produrre tale
coppia si dovrebbero oltrepassare i limiti di tensione e/o corrente: non potendo verificarsi tale situazione (quantomeno in servizio continuo, per ciò che concerne il limite di corrente), oltre la velocità base è necessario ridurre la coppia massima producibile.
49
Ulteriori Considerazioni sulla Macchina Scelta
Ci si potrebbe chiedere come mai, avendo l’obbiettivo di costruire una macchina dal basso costo, si sia deciso di ricorrere ad una struttura a due cave per polo e fase piuttosto che ad una sola, struttura che sarebbe stata chiaramente più economica.
A tale possibile obiezione si può rispondere ricordando che con un’unica cava per polo e fase non si sarebbe potuto realizzare il raccorciamento di passo e dunque non si sarebbero potute annullare le componenti armoniche di flusso di ordine 3 e multiple.
Inoltre, cosa ancor più importante, per una macchina con q=1 un’eventuale anisotropia geometrica e/o magnetica (come accade nel motore in esame) non sarebbe rilevabile nelle autoinduttanze; poiché, infatti, il periodo di tale anisotropia è pari al passo dell’unica spira (o matassa di spire) presente per ogni fase, al variare della posizione rotorica il flusso di autoinduzione concatenato con l’avvolgimento risulta costante e dunque le autoinduttanze sono costanti e indipendenti dalla posizione γ, mentre per quanto riguarda le mutue induttanze ciò non accade, in quanto in tal caso il flusso di mutua induzione complessivamente concatenato con le due diverse fasi risulta effettivamente dipendente da γ.
Sotto l’ipotesi di q=1 la matrice delle induttanze varrebbe
( )
( )
( )
( )
(
)
(
)
(
(
)
)
(
)
(
)
(
(
)
)
(
)
(
)
(
(
)
)
− − − − − − ⋅ + ⋅ = 0 γ 2p sin γ 2p sin γ 2p sin 0 γ 2p sin γ 2p sin γ 2p sin 0 L 0 L γ 8 3π 24 5π 8 3π 24 π 24 5π 24 π P 2 3 4 3 2 P 0 PL
π π σ σ σ (3.22)dove i valori delle induttanze risulterebbero:
2 N l L 2 0 0 P 0 =µ ⋅ ⋅ ⋅ξπ (3.23) p 3 N l L 2 2 0 P 2 =µ ⋅ ⋅ ξ (3.24)
3 - 2
Calcolo delle Correnti di Riferimento per il Controllo del Modello Adottato
Poiché il modello di macchina realizzato è più complesso di quello ottenuto con l’approssimazione alla prima armonica, la tecnica sinusoidale precedentemente descritta non risponde pienamente alle necessità di controllo del motore, ed è perciò necessario elaborare anche un controllo appositamente ideato per questo modello. Per far ciò si procederà perseguendo i medesimi obiettivi realizzati dal controllo sinusoidale, ma applicando il metodo al modello di macchina precedentemente presentato. Su tale modello, in ottica di controllo, provvederemo a fare alcune semplificazioni, che qui esponiamo:
1. si trascurerà, ai fini del calcolo della tensione massima applicabile, l’effetto delle componenti dell’induttanza variabili con 4pγ, poiché il valore di 4L
P è una piccola quota
delle 0LP e 2LP, rispettivamente il 1.2% e il 4%;
2. le componenti di flusso superiori alla fondamentale verranno trascurate in toto: la 5ΨM, per
esempio, è pari allo 0,33% circa della 1ΨM, e le altre armoniche rappresentano quote sempre
più piccole;
3. si trascureranno gli effetti delle armoniche superiori del vettore delle tensioni a vuoto, dal momento che 5M0 è pari a circa il 1,67% della fondamentale e le armoniche successive sono
via via decrescenti;
4. si trascurerà anche il contributo delle armoniche superiori del vettore delle tensioni mozionali incrementali, MI, poiché il modulo della 4MI (pari a 4p*4LP) è una quota pari al
7% circa della fondamentale (che ha ampiezza 2p*2LP).
Sulla base di queste semplificazioni, applicando la trasformazione di Park al modello di macchina da noi calcolato e scegliendo per il parametro di tale trasformazione il valore λ=pγ, si ottiene
+ − + = ′ 1 0 0 0 1 0 0 0 1 L 0 0 0 0 1 0 0 0 1 L 0 0 0 0 1 0 0 0 1 L 2 3 L 2 P L P 0 P (3.25) = Ψ′ 0 0 1 ψ 2 3 M 1 0 (3.26) = ′ 0 1 0 ψ p 2 3 M 1 M 0 (3.27)
51
Come si può vedere, in virtù delle semplificazioni fatte, le equazioni per il calcolo delle correnti di riferimento applicate al modello sviluppato in questo lavoro sono formalmente identiche a quelle ricavate dall’approssimazione sinusoidale, ma poiché i valori dei parametri induttanza e flusso a vuoto sono diversi nei due casi, diverse saranno anche le correnti con cui si comanderà la macchina per sviluppare la coppia desiderata.
Nel seguito, il modulo delle componenti del vettore M verranno indicati con:
M 1 0 1 ψ 2 3 p M′ = (3.28)
Funzionamento al di sotto della Velocità Base
Come nel controllo sinusoidale, anche il controllo ad hoc che vogliamo realizzare ha l’obiettivo di minimizzare le correnti assorbite, producendo ovviamente la coppia richiesta Wrif. Sulla base di
quanto sopra esposto, l’equazione di coppia viene valutata dalla relazione
(
)
= + = ⋅ ⋅ − ⋅ + ⋅ ′ = min i i iˆ i i L L p i M ' W 2 q 2 d 2 q d q d q 0 1 E (3.29)formalmente identica a quanto visto al paragrafo 2-3, nella quale però si utilizzeranno i parametri ricavati dal modello esposto precedentemente, e non quelli ottenuti dall’approssimazione di prima armonica.
Funzionamento in Sovravelocità
Il principio sul quale si basa il controllo in questa condizione di funzionamento è, come nel caso di controllo sinusoidale, il mantenimento del modulo della tensione elettromagnetica di macchina pari alla massima tensione di alimentazione che può essere fornita dall’inverter.
Tale vincolo di tensione, espresso nel riferimento di Park, per effetto delle semplificazioni fatte sul modello che si utilizza per il calcolo delle correnti di riferimento, coincide con quello imposto nel caso di approssimazione alla prima armonica e di controllo sinusoidale (2.7).
Il valore delle correnti id*e iq* può essere perciò calcolato risolvendo il sistema composto dalle
equazioni di coppia e di tensione: