Capitolo 1
Illustrazione del sistema di monitoraggio
L’obiettivo di questo lavoro di tesi è stato quello di estendere le potenzialità del sistema di monitoraggio PCU (Plant Check Up), messo a punto negli ultimi anni nel Laboratorio di Controllo dei Processi Chimici del Dipartimento di Ingegneria Chimica dell’Università di Pisa, a anelli di regolazione interessati da variazioni di set-point.
In particolare, prima di questo lavoro di tesi, la PCU era in grado di analizzare solo quei dati interessati da un numero medio di cambi di set-point nell’unità di tempo inferiore ad una certa frequenza, mentre non era in grado di analizzare dati provenienti da loops in cascata o sottoposti a controllo avanzato.
Oltretutto, sebbene i dati interessati da cambi di set-point non “eccessivi” (inferiori alla frequenza di soglia) potessero essere sottoposti al modulo di individuazione anomalie, nel caso venisse diagnosticato come causa di scarsa prestazione un tuning inappropriato del controllore, questi non potevano essere sottoposti al modulo di identificazione e retuning.
L’obiettivo è stato raggiunto mettendo a punto un modulo di identificazione e retuning per dati interessati da cambi di set-point che verrà ampiamente descritto nei prossimi capitoli.
In questo capitolo si descriverà l’architettura del sistema di monitoraggio PCU mettendo in evidenza il contributo portato dal modulo di identificazione e retuning per dati a set-point variabile. Occorre specificare che l’espressione “dati con set-point costante” fa riferimento a tutti quei dati che hanno delle variazioni di set-point inferiori ad un certo valore di soglia e che quindi possono essere assimilati a dati con set-point costante.
Il set-point (SP) rappresenta il valore desiderato della variabile controllata (PV) ed è sulla base della differenza tra queste due variabili che, in un comune schema in retroazione, il controllore stabilisce l’entità dell’azione di controllo (OP). Quest’ultima viene trasferita mediante un attuatore in ingresso al processo. La variabile che effettivamente agisce sul processo è la variabile manipolata (MV).
Figura 1.1: Schema di controllo in retroazione. Processo Controllore - PV OP Valvola MV SP
• In caso il tempo di acquisizione dati valga 10 s (tale tempo sembra rappresentare il compromesso che consente di avere un numero sufficiente di informazioni ma allo stesso tempo di non sovraccaricare il sistema) come ΔSP minimo tra un tempo di campionamento e il successivo per poter parlare di cambio di set-point, si assume il 2% del valore della variabile SP.
• Come valore di soglia oltre il quale parlare di numero eccessivo di cambi di set-point si assume una frequenza pari a 1 cambio ogni 20 minuti.
1.1: PCU (Plant Check Up)
Il sistema di monitoraggio PCU è stato realizzato in ambiente MATLAB e ha lo scopo di valutare le
condizioni di funzionamento degli anelli di regolazione di base (operanti in retroazione e con regolatori ad algoritmo standard – PID) impiegando soltanto i dati normalmente registrati e disponibili in un sistema di controllo, ovvero non introducendo perturbazioni o non effettuando test specifici sugli impianti. In particolare, i dati che il pacchetto utilizza sono i valori del set-point SP, del segnale di controllo OP, della variabile controllata PV, dei parametri di tuning del regolatore e dei range del segnale di controllo e della variabile controllata.
Sebbene la variabile manipolata MV consenta un’individuazione più rapida del fenomeno di attrito, essa non viene impiegata dalla PCU. Il motivo di questa scelta è che solitamente tale variabile non è disponibile a causa di problematiche inerenti la sua misurazione.
Per quanto riguarda l’implementazione della PCU si tratta di un sistema di monitoraggio fuori linea in cui dapprima vengono selezionati i loops caratterizzati da scarsa prestazione e poi questi ultimi vengono sottoposti ad una serie di analisi al fine di diagnosticarne la causa. Una volta diagnosticata la causa di scarsa prestazione il sistema di monitoraggio stabilisce possibilmente una qualche contro-misura.
Come è stato detto nell’introduzione di questo capitolo, nel seguito si descriveranno “i cammini della PCU” seguiti dai vari anelli di regolazione al fine di riconoscere l’eventuale presenza di anomalie, di diagnosticarne la causa, e di individuare un possibile rimedio, mettendo in evidenza il contributo portato da questo lavoro di tesi.
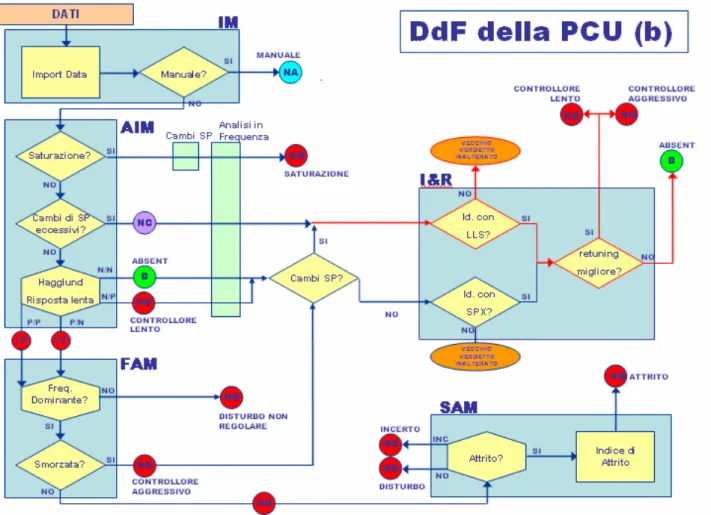
In figura 1.2 (a) e in figura 1.2 (b) si confronta la struttura della PCU prima e dopo l’ introduzione del modulo di identificazione e retuning per dati a SP variabile.
Figura 1.2: Diagramma di flusso della PCU prima (a) e dopo (b) questo lavoro di tesi.
Come è possibile vedere dalle figure sopra riportate, la PCU è idealmente divisa in moduli; a questi si farà riferimento nel seguito per descrivere la sua organizzazione.
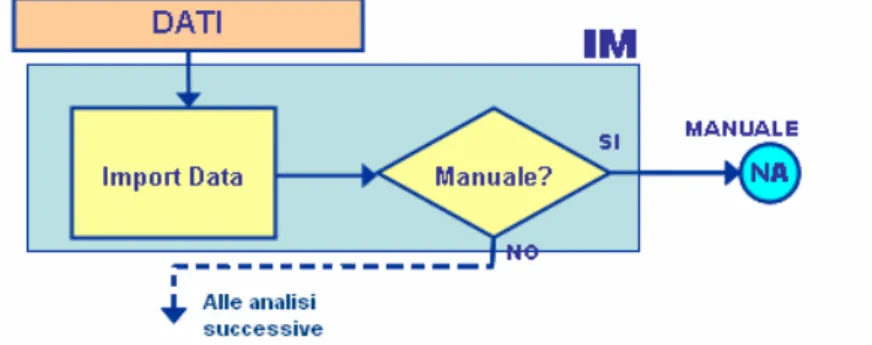
1.2: Modulo IM (Inizialization Module)
In questo modulo vengono semplicemente acquisite tutte le informazioni utili per l’analisi, ovvero: i dati, i parametri del regolatore, i parametri di controllo e i parametri di configurazione.
Tra tutte queste informazioni hanno particolarmente rilevanza in questo modulo i parametri di configurazione, ovvero le informazioni relative alla modalità di controllo che interessa il loop in esame (Manuale, Automatico, Cascata, Controllo Avanzato). Se infatti la modalità di controllo è Manuale, i dati non possono essere sottoposti a nessun tipo di indagine e vengono immediatamente etichettati come NA (Non Analizzabili).
Figura 1.3: Modulo IM.
1.3: Modulo AIM (Anomalies Identification Module)
I dati che non sono stati etichettati come NA dal modulo IM vengono inviati al modulo AIM (Anomalies Identification Module).
In uscita da questo modulo ogni serie di dati avrà un etichetta relativa al suo stato: B (Buono), NB (Non Buono), NC (Non Classificato). Addirittura per alcune serie di dati sarà nota anche la causa dell’anomalia.
Per anomalie si intende la presenza di riposte lente o oscillanti.
Per l’individuazione di risposte oscillanti si fa uso di una versione rivista del Test di Hägglund (Hägglund, 1995).
Per l’individuazione di risposte lente, nei precedenti lavori di tesi è stato elaborato un algoritmo capace di superare le limitazione di quello originariamente presente nel pacchetto che consisteva nel test proposto da Hägglund nel 1999 e che impiegava come indice di prestazione l’Idle Index.
In realtà, come è possibile vedere dalla figura 1.4, non tutti i dati che arrivano al modulo AIM vengono sottoposti ai test per l’individuazione di anomalie. Vengono esclusi infatti quei dati che presentano saturazione e quelli che presentano un numero eccessivo di cambi di set-point (numero di cambi di set-point nell’unità di tempo superiore al valore di soglia). I primi vengono etichettati come NB (Non Buoni) a causa della saturazione mentre i secondi vengono etichettati come NC (Non Classificati).
Figura 1.4: Modulo AIM. In uscita dal modulo AIM si hanno quindi sei tipologie di loops:
1. loops Non Buoni perché presentano saturazione;
2. loops Buoni: si tratta di loops per cui sia il test di Hagglund, sia il test sulla risposta lenta, hanno avuto esito negativo;
3. loops Non Buoni perché oscillanti: si tratta di loops per cui il test di Hagglund ha avuto esito positivo e quello della riposta lenta ha avuto esito negativo. Per individuare la causa dell’oscillazione sono richieste analisi aggiuntive che vengono effettuate dai moduli descritti di seguito.
4. loops Non Buoni perché caratterizzati da riposta lenta: si tratta di loops per cui il test sulla risposta lenta ha avuto esito positivo e il test di Hagglund negativo. Per questi loops la causa dell’anomalia è nota già a questo punto: tuning conservativo del controllore.
5. loops Non Buoni per i quali entrambi i test hanno avuto esito positivo: questi loops vengono assimilati a quelli del tipo 2 (Non Buoni perché oscillanti).
6. loops Non Classificati: si tratta di loops che non sono stati sottoposti ad analisi in quanto interessati da cambi di set-point eccessivi. Prima delle modifiche introdotte da questo lavoro di tesi, tali loops non venivano analizzati né dal modulo AIM né da qualsiasi altro modulo, mentre adesso vengono sottoposti al modulo I&R per dati con cambi di set-point. Questo aspetto verrà trattato nel paragrafo 1.7.
Nei due paragrafi successivi verrà dato qualche dettaglio relativo ai due test per l’individuazione di risposte oscillanti e lente.
1.3.1: Test di Hägglund
L’algoritmo del Test di Hägglund (Hägglund, 1995) è una procedura che consente di individuare quando le prestazioni di un circuito di controllo si stanno deteriorando a causa dell’insorgere di oscillazioni anomale e persistenti.
Chiaramente alla base di un algoritmo di questo tipo c’è la necessità di stabilire quando un’oscillazione può essere ritenuta significativa. La procedura di Hägglund sancisce che un’oscillazione può considerarsi significativa quando il valore assoluto dell’errore, IAE (Integral Absolute Error), supera un certo limite denominato IAElim. I due indici sono definiti come segue:
1 | ( ) | i i t t IAE e t dt + =
∫
(1.1) / 0 2 | sin( ) | lim a IAE a t dt π ωω
ω
=∫
⋅ ⋅ = (1.2) Dove:• e(t): differenza tra il valore della variabile controllata PV e quello del set-point SP al tempo t.
• ti /ti+1: tempi consecutivi a cui la funzione e(t) assume il valore zero.
Ovviamente perché la funzione e(t) oscilli intorno allo zero è necessario che il regolatore abbia azione integrale.
Il Test di Hägglund, quindi, stabilisce che possa essere classificata come risposta oscillante una risposta il cui indice IAE, valutato tra due istanti consecutivi in cui e(t) assume il valore zero, sia maggiore dello stesso indice valutato in caso l’errore abbia le caratteristiche di un’onda puramente sinusoidale con ampiezza a e frequenza ω.
Poiché l’idea base del Test di Hägglund non è quella di individuare e segnalare oscillazioni anomale ma quella di segnalare e individuare oscillazioni anomale persistenti, Hägglund ha fissato un intervallo di tempo, detto di supervisione (Tsup) nel quale eseguire l’analisi. Se il numero di
oscillazioni supera un determinato limite (nlim) durante questo periodo, la prestazione dell’anello di
regolazione è considerata scadente a causa della presenza di una risposta troppo oscillante. Due importanti aspetti del test di Hägglund sono:
1. tempo di supervisione fisso e dipendente dalla costante di azione integrale del regolatore; 2. valore dell’IAElim dipendente dalla costante integrale del regolatore.
La costante di azione integrale del regolatore è quindi un parametro fondamentale nel Test di Hägglund.
Pensare di ottenere dal test risultati attendibili supponendo un tuning corretto, è una contraddizione, uno dei principali motivi, infatti, per cui si sta conducendo l’analisi è la possibilità di un tuning errato.
Al fine di evitare questo tipo di problema è stata proposta, nei precedenti lavori di tesi (Cerrone & Scardigli, 2006), una modifica al test. Tale modifica consiste nel conferire al tempo di analisi la maggiore flessibilità possibile.
supervisione) e sono stati stabiliti due parametri (β e TM) che ne determinano la lunghezza e
eventualmente ne consentono l’ampliamento.
1.3.2: Test per l’individuazione di risposte lente
Nella prima versione del sistema di monitoraggio si individuavano le risposte lente impiegando la tecnica proposta da Hägglund nel 1999. Tale tecnica prevede l’impiego di un indice di prestazione denominato Idle Index.
Il principale problema di questo algoritmo per l’individuazione di risposte lente era la sua poca robustezza in presenza di rumore, nel caso non si effettuasse una preventiva filtrazione dei dati da esaminare.
Per ovviare a questi problemi è stato proposto, nei precedenti lavori di tesi, un metodo diverso per classificare una risposta come lenta (Ulivari, 2004). Secondo tale metodo una risposta può essere definita lenta se si verifica la seguente condizione:
lim
IAE 10 IAE> ⋅ (1.3)
Per quanto riguarda la definizione di IAE e IAElim è la stessa riportata nel paragrafo 1.3.1.
In realtà anche tale metodo ha subito un successivo aggiornamento (Cerrone & Scardigli, 2006), secondo il quale una risposta può essere definita lenta in caso siano rispettate le seguenti condizioni:
1. IAE > 10·IAElim;
2. SP costante (assenza di variazioni significative del set-point) durante la durata dell’ oscillazione;
3. durata dell’oscillazione maggiore di 30 minuti; 4. assenza di saturazione della valvola.
L’aggiunta delle condizioni 2, 3 e 4 ha permesso di evitare che casi particolari venissero erroneamente classificati come interessati da risposta lenta.
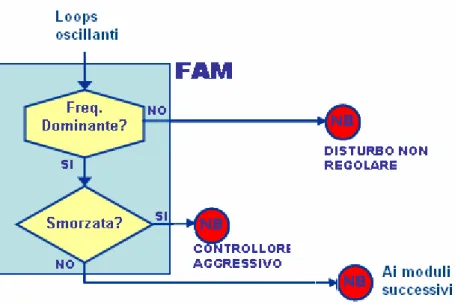
1.4: Modulo FAM (Frequency Analysis Module)
I loops che sono stati etichettati dal modulo AIM come oscillanti in quanto il Test di Hägglund ha dato esito positivo, arrivano al modulo FAM ( Frequency Analysis Module).
In questo modulo si verifica per prima cosa se le oscillazioni presentano una frequenza dominante. In caso di risposta negativa si individua la causa dell’oscillazione nella presenza di un disturbo non regolare; in caso di risposta positiva si sottopongono i dati ad un’ulteriore indagine che consente di stabilire se la variabile controllata ha un andamento smorzato o meno. Qualora venga rilevato un andamento smorzato si individua la causa dell’oscillazione nella sintonizzazione troppo aggressiva del controllore, altrimenti si inviano i dati verso ulteriori approfondimenti (modulo SAM).
Figura 1.6: Modulo FAM.
È da sottolineare il fatto che tutti i loops, anche quelli che non arrivano al modulo FAM in quanto non oscillanti, vengono sottoposti all’analisi per l’individuazione di frequenze dominanti. Tale analisi è infatti utile per stabilire se ci sono dei disturbi che interessano più anelli di regolazione.
1.5: Modulo SAM (Stiction Analysis Module)
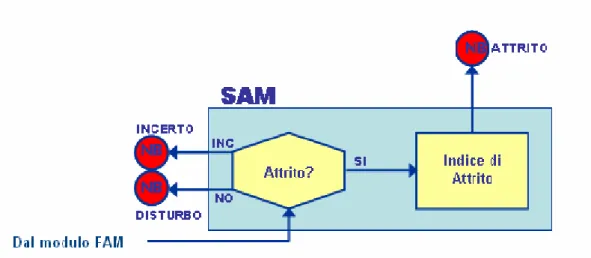
Quei loops per i quali si è escluso che la causa dell’oscillazione possa essere la presenza di un disturbo non regolare o la sintonizzazione troppo aggressiva del controllore, vengono sottoposti ad un’ulteriore indagine effettuata nel modulo SAM (Stiction Analysis Module).
Tale modulo consente di stabilire quale sia la causa dell’oscillazione tra le due rimanenti: presenza di attrito o sovrapposizione di un disturbo regolare. In realtà il modulo potrebbe anche non riuscire a stabilire la causa dell’oscillazione.
Figura 1.7: Modulo SAM.
Nel modulo SAM vengono eseguite quattro tecniche automatiche di analisi per individuare la presenza di attrito: la Cross-Correlazione, la Bicoerenza, il Relay e il Test di Yamashita. Tali tecniche verranno brevemente descritte nei prossimi paragrafi.
Ciascuna delle quattro tecniche può dare tre verdetti: presenza di attrito, presenza di disturbo sinusoidale, incertezza.
Il verdetto finale viene assegnato nel modo seguente:
1. Per ogni tecnica si assegnano i valori di 0, 0.5, 1 rispettivamente nei casi di disturbo, incertezza, attrito.
2. Si trascurano le tecniche risultate incerte e si effettua la media dei valori ottenuti. Se tale media risulta maggiore, uguale o minore di 0.25, il loop viene classificato rispettivamente come: affetto da attrito, incerto, affetto da disturbo.
È importante sottolineare che per dare un giudizio finale è necessario che almeno due tecniche abbiano dato un verdetto diverso da incerto, altrimenti il loop viene automaticamente etichettato come incerto.
Per quei loops per cui il verdetto finale è presenza di attrito si può procedere con il calcolo di un indice (Iman), utile per decidere se consigliare la compensazione o se è necessario effettuare la
manutenzione della valvola (Cerrone & Scardigli, 2006).
L’indice Iman può anche essere utilizzato per un’analisi storica dei fenomeni d’attrito: ripetendo
l’analisi in tempi diversi sullo stesso circuito e collezionando il valore di tale indice è possibile osservare come si evolve l’attrito stesso. Interpolando i valori di Iman è poi possibile dare una stima
del tempo di raggiungimento della saturazione, riuscendo così a programmare in anticipo la manutenzione delle valvole.
1.5.1: Cross correlation
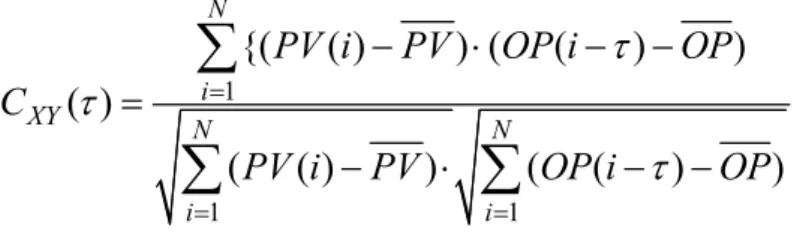
Si tratta di un tecnica molto semplice e per questa ragione molto impiegata nelle applicazioni industriali (Horch, 1999). Essa si basa sulla costruzione della seguente funzione di correlazione incrociata tra le variabili OP e PV:
1 1 1 {( ( ) ) ( ( ) ) ( ) ( ( ) ) ( ( ) ) N i XY N N i i PV i PV OP i OP C PV i PV OP i OP
τ
τ
τ
= = = − ⋅ − − = − ⋅ − −∑
∑
∑
(1.4)Le variabili soprassegnate stanno ad indicare il valor medio della variabile stessa. Questa tecnica si basa su due ipotesi:
1. che in caso di disturbo esterno sia PV che OP abbiano un andamento sinusoidale;
2. che PV e OP in caso di attrito abbiano la forma rispettivamente di un’onda quadra e di un’onda triangolare.
Se tali ipotesi sono verificate la funzione di correlazione incrociata è una funzione pari (simmetrica rispetto all’asse y) nel caso di disturbo e una funzione dispari (simmetrica rispetto all’origine) in caso di attrito e consente di distinguere la causa di scarsa prestazione.
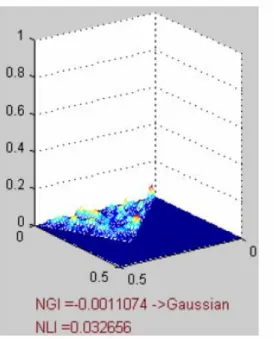
1.5.2: Bicoerenza
Questa tecnica si basa su statistica di ordine elevato. Mentre infatti i fenomeni lineari possono essere descritti da statistiche del primo o del secondo ordine (media, varianza ecc..), i fenomeni non lineari, quali ad esempio l’attrito, devono essere individuati usando statistiche elevate (Choudhury et al. 2004).
Definita la coppia di frequenze (f1, f2), la Bicoerenza (bic2(f1, f2)) si calcola come segue:
2 2 1 2 1 2 2 2 1 2 1 2 | ( , ) | ( , ) (| ( ) ( ) | ) (| ( ) | ) B f f bic f f E Y f Y f E Y f f = ⋅ ⋅ + (1.5) Dove:
B(f1, f2): bispettro delle frequenza f1 e f2: E Y f( ( )1 ⋅Y f( )2 ⋅Y f*( 1+ f2)); Y: trasformata di Fourier discreta del segnale;
E(Y): valore di aspettazione di Y;
Y*: complesso coniugato di Y.
Ogni punto di bic2(f1, f2), plottato rispetto a f1 e f2 in un grafico tridimensionale, misura l’interazione tra le due frequenze. La presenza di picchi nel grafico tridimensionale indica la presenza di non linearità e quindi di attrito, mentre l’assenza di picchi indica l’assenza di attrito.
1.5.3: Relay
Questa tecnica (Rossi, Scali (2005)) si basa sul riconoscimento della forma d’onda della PV. Ogni semiciclo viene analizzato separatamente e approssimato con un’onda sinusoidale, un’onda triangolare ed un’onda ottenuta come uscita da un sistema del primo ordine con ritardo in serie ad un relay.
Sulla base dell’errore commesso in ognuna delle tre approssimazioni si stabilisce se il semiciclo è affetto o meno da attrito: se è migliore l’approssimazione del seno l’oscillazione viene associata ad un disturbo esterno, se è migliore una delle altre due approssimazioni viene associata ad attrito. La tecnica consente anche di individuare la presenza di attrito asimmetrico.
Figura 1.10: Andamento dei dati reali (in nero), dell’approssimazione con seno (in rosso), dell’approssimazione migliore tra relay e triangolo (in blu) per un ciclo.
1.5.4: Test di Yamashita
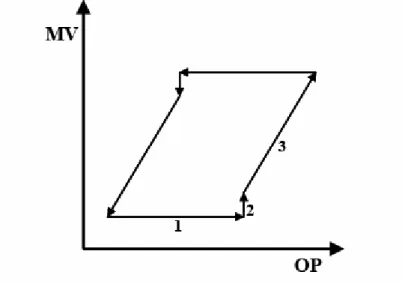
Tale tecnica (Yamashita, 2006) si basa sulla tipica forma del grafico MV vs. OP che si osserva nel caso in cui una valvola risulti affetta da attrito. Proprio per questo motivo, il test è applicabile solo a anelli di regolazione FC (la cui variabile controllata è una portata), per i quali si può ritenere che la variabile manipolata MV sia proporzionale alla variabile controllata PV. Per tutti gli anelli di regolazione che non siano anelli di regolazione di portata, infatti, non si ha alcuna informazione riguardo alla variabile MV.
Nel caso di valvola perfetta la curva caratteristica (grafico MV vs. OP) è una retta sia per la fase di apertura sia per quella di chiusura.
In caso di attrito, invece, si verifica un ciclo di isteresi dovuto ad una zona in cui la valvola non si muove. Il ciclo di isteresi noto come “stick-slip motion”, è mostrato in figura 1.11.
Figura 1.11: Andamenti tipici MV vs. OP
Come si vede dalla figura 1.11, il ciclo di isteresi è caratterizzato dai seguenti cammini:
1. Valore costante (dead-band): MV rimane costante al passare del tempo nonostante la OP cambi; la valvola è bloccata per la presenza di attrito statico.
2. Salto (jump): in corrispondenza di un certo valore di OP, MV cambia bruscamente; la forza attiva sblocca la valvola.
3. Movimento (slip): MV varia gradualmente al variare di OP; solo l’attrito dinamico si oppone alla forza attiva.
Yamashita propone di identificare i cammini caratteristici con una sequenza di simboli.
La rappresentazione più semplice è quella nel tempo che richiede solo tre simboli: I per crescente, S per fermo e D per decrescente (figura 1.12). Ciascuno di questi viene a volte indicato con “più”, “zero” e “meno”, a seconda del segno della sua derivata prima.
Per riprodurre invece i cammini in un piano X-Y, è necessario definire nove simboli (figura 1.13 e tabella 1.1).
Figura 1.12: Tre simboli per la rappresentazione semplificata
Figura 1.13: Simbologia e direzioni
Tabella 1.1: Nove simboli
Il simbolo SS non si muove nel piano e rappresenta il centro della figura 1.13.
Una sequenza di questi simboli descrive un cammino nel piano MV - OP; per esempio la sequenza IS-II-DS-DD riproduce un cammino trapezoidale in senso orario.
Il test proposto da Yamashita consiste nell’individuare la presenza di non linearità contando i cammini caratteristici dell’attrito (IS-II, DS-DD, IS-SI e DS-SD), rispetto ai cammini totali per l’anello di controllo in esame. Nei precedenti lavori di tesi (Cerrone & Scardigli, 2006) il Test di Yamashita è stato modificato ampliando il numero di cammini caratteristici dell’attrito. Un attuatore affetto da attrito, infatti, può presentare, in un grafico MV vs. OP, oltre al cammino proposto da Yamashita (cammino diretto antiorario), altri tre cammini caratteristici (cammino inverso antiorario, cammino diretto orario e cammino inverso orario). I cammini diretti e inversi in senso antiorario sono correlabili ad una valvola ad azione diretta, mentre i cammini diretti e inversi in senso orario ad una valvola ad azione inversa.
Y
X D (decreasing) S (steady) I(increasing)
D (decreasing) DD DS DI
S (steady) SD SS SI
1.6: Modulo I&R (Identification and Retuning) per loops
caratterizzati da set-point costante
Quei loops che sono stati classificati come Buoni o come Non Buoni a causa di un tuning inadeguato del controllore e che non sono interessati da alcun cambio di set-point, vengono sottoposti ad un modulo di identificazione che impiega il metodo del simplesso. Se l’identificazione ha esito positivo si rende disponibile l’opzione di retuning, con riferimento a tecniche diverse (Rossi, 2007).
Figura 1.14: Modulo I&R per dati senza cambi di set-point.
1.7: Il contributo di questo lavoro di tesi
Da quanto descritto nei paragrafi precedenti è evidente che le principali limitazione della PCU erano:
1. l’impossibilità di trattare dati interessati da cambi di set-point eccessivi;
2. l’impossibilità di sottoporre ad identificazione e retuning i loops interessati da cambi di set-point non eccessivi.
Tali limitazioni sono state superate attraverso la messa a punto di un modulo di identificazione per dati a set-point variabile; è stato inoltre sviluppato un modulo di retuning la cui attivazione è subordinata al successo della procedura di identificazione.
L’ideazione e la realizzazione dei moduli di identificazione e di retuning e i risultati che questi hanno consentito di raggiungere, verranno descritti nei prossimi capitoli.