68
CAPITOLO 4
T
EST DI
L
ABORATORIO E
C
OLLAUDO
DEL
S
ISTEMA
In questo capitolo saranno esposte le metodologie e i processi di test del sistema in fase di sviluppo; inoltre verranno mostrati alcuni risultati ottenuti durante il collaudo sulle imbarcazioni nelle prove a mare.
4.1
T
EST DI
L
ABORATORIO
Per il test del sistema in fase di realizzazione sono stati usati diversi mezzi. Per quanto riguarda lo sviluppo della board di interfaccia custom per il sensore di inclinazione/accelerazione, il lavoro è stato svolto con l’ausilio del software “ AVR Studio ” della ATMEL. Attraverso esso è stato possibile testare passo per passo la stesura del firmware per il controllo del sensore.
Il progetto del PCB della board è stato eseguito utilizzando
OrCAD Layout.
Per la sezione software le operazioni di test sono risultate più complesse, in quanto durante lo sviluppo in laboratorio non è stato possibile disporre dei sistemi presenti a bordo delle imbarcazioni per monitorarne i segnali in uscita. La strada seguita è quella della realizzazione di emulatori, riproducenti uscite dati simulate, per i vari dispositivi. Il lavoro è stato svolto ancora con l’ausilio del software
adempiere ai compiti richiesti.
L’idea di fondo è basata sulla conoscenza delle stringhe dati in uscita alle sorgenti sulle imbarcazioni.
Queste sono state acquisite nel corso delle prove a mare con semplici software monitor per le connessioni tramite porte PC, come ad esempio
Microsoft Hyper Terminal.
In questo modo sono stati resi a disposizione alcuni file di testo contenenti le stringhe inviate dagli strumenti.
A questo punto sono state sviluppate delle VI in grado di leggere dai file di cui sopra e fornire i dati in uscita riproducendo il canale di trasmissione del collegamento desiderato. In pratica si hanno dei moduli che simulano i dispositivi interessati. Questi sono stati sfruttati per il test del sistema in laboratorio.
Tutto ciò riguardo alle sorgenti dati digitali; per i segnali analogici da Flap e Trim le prove sono state effettuate semplicemente inviando al DAQ USB-6008 delle tensioni continue da alimentatori stabilizzati da banco e verificando il corretto operare del sistema.
Le VI di emulazione prodotte sono due, una per i dati da strumenti di navigazione, codificati nel protocollo NMEA 0183, e l’altra per riprodurre i segnali da motori inviati su CAN bus.
4.1.1 Emulatore per dati NMEA 0183
Questa VI riceve in ingresso il file di testo contenente le stringhe codificate in NMEA 0183 (vedi Figura 8.3). Queste vengono lette e inviate sulla porta seriale scelta dall’utente nel pannello frontale della VI, separando ognuna di esse con i caratteri “ \r\n1 ”. Viene effettuato un
CAPITOLO 4 TEST DI LABORATORIO E COLLAUDO DEL SISTEMA
70
cont rollo sulla lunghezza di ogni st ringa, mostrato nel display size. In
Figura 1.4 è most rat a l int erfaccia grafica della VI.
Figura 1.4: La VI di emulazione per i segnali NMEA 0183
La st ringhe acquisit e da file e t rasmesse in uscit a sulla port a di comunicazione scelt a sono most rat e nel campo element, ment re index riport a il n° di frasi t rasmesse. At t raverso il cont rollo Step è possibile inviare una st ringa in uscit a; con run si t rasmet t ono cont inuament e in sequenza tutte le frasi lette da file.
La VI è st at a impiegat a per la simulazione dei segnali dest inat i alle port e Navigator Port 1, Navigator Port 2, AUX Port del sistema Pershing Yacht Supervisor. P er il t est è st at o necessario allest ire una ult eriore post azione
P C su cui eseguire l applicazione di emulazione.
Figura 2.4: Collegamento tra emulatore NMEA 0183 e il Pershing Yacht Supervisor per i test
Questa è stata collegata tramite porta seriale RS-232 al dispositivo di conversione USB realizzato e da esso al PC su cui è in esecuzione il sistema. Non disponendo del dispositivo RS-232 → USB poteva essere anche semplicemente implementato un collegamento seriale tra i due PC.
4.1.2 Emulatore per dati motore
Questa VI riceve in ingresso il file di testo contenente le stringhe dati motore codificate nel protocollo J1939-71 (vedi Figura 6.3), le quali vengono lette e inviate sulla porta di uscita, che sarà connessa al dispositivo CANUSB. Si ha quindi una conversione della trasmissione da USB a CAN mediante tale interfaccia. In pratica viene effettuato il processo inverso di quanto eseguito nella sezione acquisizione motori del Pershing Yacht Supervisor. Questo allo scopo di ricreare una sorgente dati motore analoga a quella che si presenta a bordo dell’imbarcazione.
Il funzionamento della VI e il modo di operare con essa è simile a quello del modulo di emulazione per segnali NMEA 0183 descritto nel paragrafo 4.1.1. Il modulo è in grado di ricreare l’uscita di un solo motore. Dunque occorreranno due VI di questo tipo per il test esaustivo del sistema.
Figura 3.4: Collegamento tra emulatore motore e il Pershing Yacht Supervisor durante i test
Per il collegamento tra i due CANUSB è necessario un apposito adattatore.
CAPITOLO 4 TEST DI LABORATORIO E COLLAUDO DEL SISTEMA
72
4.2
C
OLLAUDO
Per la descrizione del collaudo del sistema si fa riferimento ad alcune delle prove a mare nelle quali è stato fatto uso del Pershing Yacht Supervisor.
In particolare sono considerate prove effettuate su due diversi modelli di yacht: l’ITAMA 55’-FIFTYFIVE e il Pershing 50’-FIFTY 2.
4.2.1 Prove con l’ITAMA 55’
Le prove descritte dai dati riportati di seguito sono finalizzate al confronto delle prestazioni ottenute dall’imbarcazione, in condizioni di meteo marine simili, con due diversi modelli di elica.
Figura 4.4: L'imbarcazione ITAMA 55'
Mediante il Pershing Yacht Supervisor sono state effettuate delle acquisizioni di tipo log totale per una durata di circa 55 minuti e di tipo
RPM log, per circa 50 secondi, per ogni valore di giri motore supportato
dal sistema. In Figura 5.4 è mostrata una parte del verbale riportante le condizioni nelle quali sono state svolte le prove.
Figura 5.4:Verbale di prova in mare con ITAMA 55'
Dall’elaborazione dei dati è possibile estrarre interessanti grafici per le varie grandezze, ad esempio quelli che confrontano le prestazioni dell’imbarcazione con eliche di modelli diversi, le standard montate dalla
ITAMA e le SBM.
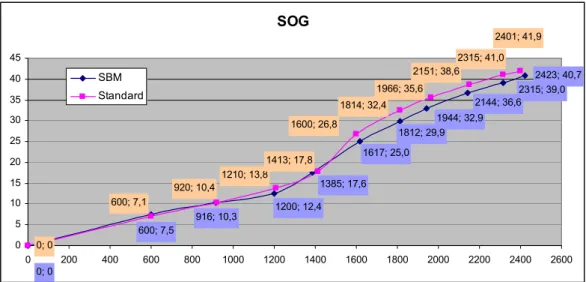
In Figura 6.4 è riportato l’andamento della Speed Overground in funzione del n°giri motore.
Si nota che la velocità è circa la stessa per i due casi, con un massimo di
SOG = 41,9 ottenuta con elica standard.
Figura 6.4: Andamento della SOG in funzione del n° di giri motore
SOG 0; 0 2423; 40,7 2315; 39,0 2144; 36,6 1944; 32,9 1812; 29,9 1617; 25,0 1385; 17,6 1200; 12,4 600; 7,5 0; 0 916; 10,3 600; 7,1 920; 10,4 1210; 13,8 1413; 17,8 2401; 41,9 2315; 41,0 2151; 38,6 1966; 35,6 1814; 32,4 1600; 26,8 0 5 10 15 20 25 30 35 40 45 0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200 2400 2600 SBM Standard
CAPITOLO 4 TEST DI LABORATORIO E COLLAUDO DEL SISTEMA
74
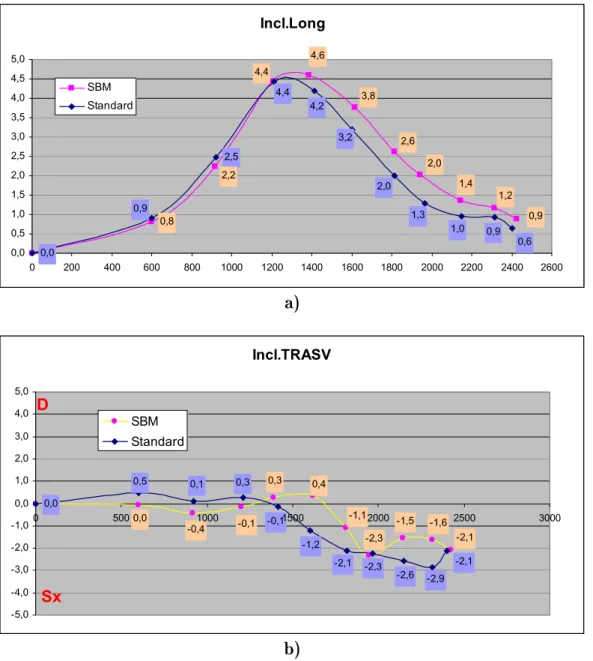
Di notevole interesse sono anche li inclinazioni longitudinali e trasversali, riportate rispettamente in Figura 7.4 a) e b).
a)
b)
Figura 7.4: a) Inclinazione longitudinale; b) trasversale in funzione del n°giri motore
Da tali diagrammi risulta un comportamento migliore dello yacht con le eliche standard.
Molto importante per lo studio dei dati rilevati è l’analisi delle traiettorie percorse dall’imbarcazione durante i test di collaudo (vedi Figura 8.4). Sulla base di esse è possibile interpretare in modo più chiaro le grandezze acquisite, che descrivono il comportamento assunto dallo yacht.
Incl.Long 0,0 0,8 0,0 2,5 2,2 2,6 3,8 4,6 4,4 2,0 1,4 1,2 0,9 0,6 0,9 1,0 1,3 2,0 3,2 4,2 4,4 0,9 0,0 0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0 4,5 5,0 0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200 2400 2600 SBM Standard Incl.TRASV 0,0 0,0 -2,3 -1,1 0,4 0,3 -0,1 -0,4 0,0 -1,5 -1,6 -2,1 -2,1 -2,9 -2,6 -2,3 -2,1 -1,2 -0,1 0,3 0,1 0,5 -5,0 -4,0 -3,0 -2,0 -1,0 0,0 1,0 2,0 3,0 4,0 5,0 0 500 1000 1500 2000 2500 3000 SBM Standard D Sx
Figura 8.4:Traiettorie percorse dall'imbarcazione nel corso di una delle prove effettuate
Inoltre l’analisi di tali tracce consente misurare i diametri delle virate e la capacità dell’imbarcazione di evitare la collisione con eventuali ostacoli.
4.2.2 Prove con il Pershing 50’
Le prove, qui riportate per il Pershing 50’ sono finalizzate alla ricerca, verifica e monitoraggio delle cause di alcune rotture meccaniche riscontrate durante i test.
CAPITOLO 4 TEST DI LABORATORIO E COLLAUDO DEL SISTEMA
76
I dati riguardanti la prova sono mostrati in Figura 9.4. Anche in questo caso sono state effettuate acquisizioni sia di tipo log totale, sia RPM Log. In Figura 10.4 è possibile osservare come sono organizzati i dati memorizzati.
Figura 10.4: Organizzazione dei dati acquisiti durante le prove
Nella colonna di colore grigio sono riportati gli istanti temporali di memorizzazione. In giallo e arancio sono evidenziati i dati, rispettivamente, da motore sinistro e destro; in verde quelli da strumenti di navigazione, in azzurro i valori da sorgenti analogiche di Flap e Trim e in viola le inclinazioni e accelerazioni lungo gli assi x,y. Tutto ciò rispecchia il contenuto dei file di log creati dal Pershing Yacht Supervisor.
Per gli scopi sopra citati risultano di notevole interesse gli andamenti delle coppie motore (Torque) nel tempo (Figura 11.4).
Figura 11.4: Andamento della coppia motore sx,dx nel tempo e altri parametri principali
Pershing 5061 0 10 20 30 40 50 60 70 80 90 100 8.49.20 8.51.20 8.53.20 8.55.20 8.57.20 8.59.20 9.01.20 9.03.20 9.05.20 9.07.20 9.09.21 Tempo S o g [Knt ] ; T o rq ue [°] ; T ram . Oil [°] 0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200 2400 2600 2800 3000 3200 3400 Gir i [r p m ] SOG Act Eng %Torque_R Act Eng %Torque_L Trasm Oil Temp_L Trasm Oil Temp_R Left Engine RPM Right Engine RPM
CAPITOLO 4 TEST DI LABORATORIO E COLLAUDO DEL SISTEMA
Queste sono riportate in relazione ad altri parametri principali, quali SOG, giri RPM, temperatura del carburante. In particolare è stata evidenziata la zona delle carat t erist iche in cui sono st at i riscont rat i problemi, in corrispondenza di alcune virat e dello yacht . Si not ino ad esempio i picchi negat ivi present at i dalla coppia mot ore sinist ro (Actual Engine Percent Torque (%)_L).
Alt ro grafico d int eresse è quello che rappresent a il consumo carburante (Fuel Rate) in relazione alla sua temperatura(Engine Oil Temperature) e a quella del liquido raffreddament o mot ori(Engine Coolant T emperature), nel tempo.
Figura 12.4: Andamento di Fuel Rate, Eng Oil Temp, Eng Cool Temp nel tempo
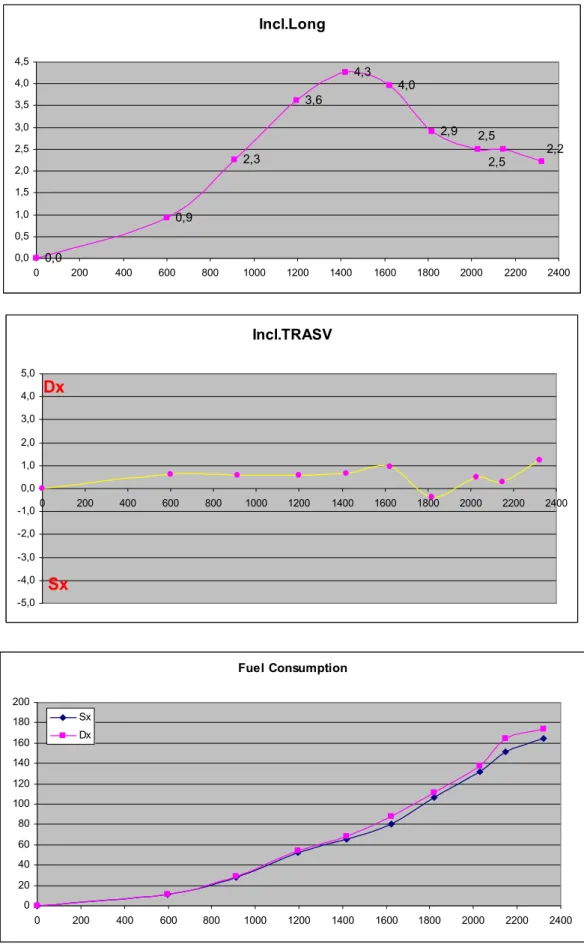
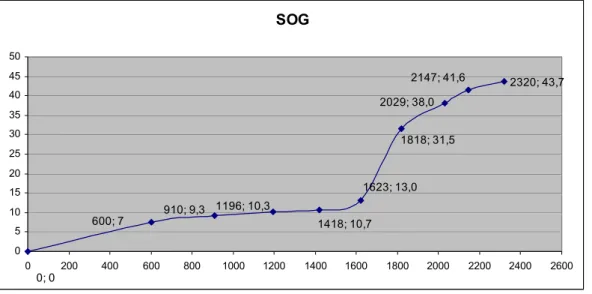
Inolt re sono st at i graficat i, come per la prova con ITAMA 55 , inclinazioni longit udinali e t rasversali, consumo carburant e (Fuel Consumption) e Speed Overground in relazione al n° giri mot ore, come risult at o delle acquisizioni RPM log (Figure 13.4 e 14.4).
Pershing 50-61 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 L Fuel Rate R Fuel Rate Eng Oil Temp1_L Eng Oil Temp1_R Eng Cool Temp_L Eng Cool Temp_R
CAPITOLO 4 TEST DI LABORATORIO E COLLAUDO DEL SISTEMA
78
Figura 13.4: Andamento di Inclinazione longitudinale e trasversale e Fuel Consumption in funzione del n° giri motore per il Pershig 50’
Incl.Long 0,0 0,9 2,3 3,6 4,3 4,0 2,9 2,5 2,5 2,2 0,0 0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0 4,5 0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200 2400 Incl.TRASV -5,0 -4,0 -3,0 -2,0 -1,0 0,0 1,0 2,0 3,0 4,0 5,0 0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200 2400 Dx Sx Fuel Consumption 0 20 40 60 80 100 120 140 160 180 200 0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200 2400 Sx Dx
Figura 14.4: Andamento della Speed Overground in funzione del n° giri motore
Dai risultati riportati in relazione alle due prove, con ITAMA 55’ e
Pershing 50’ emergono le potenzialità del sistema realizzato, il
Pershing Yacht Supervisor.
Questo, come possibile osservare, si rivela uno strumento utilissimo nel collaudo per analizzare i dati rilevati, dai quali è possibile trarre un grande quantitativo di conclusioni. Basti pensare, in riferimento all’esempio del paragrafo 4.2.1 , al confronto tra le prestazioni ottenibili con due diversi componenti, come le eliche.
Ma il sistema sviluppato va oltre le aspettative di monitoraggio dati, in quanto è utilizzabile anche come strumento di diagnosi, previsione e per individuare malfunzionamenti e guasti. Nel paragrafo 4.2.2 ne è fornito un chiaro esempio: in base all’analisi dati acquisiti è possibile studiare le cause di alcune rotture meccaniche riscontrate durante le prove.
SOG 2320; 43,7 2147; 41,6 2029; 38,0 1818; 31,5 1623; 13,0 1418; 10,7 1196; 10,3 600; 7 0; 0 910; 9,3 0 5 10 15 20 25 30 35 40 45 50 0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200 2400 2600