Capitolo 6
Simulazioni di risonatori torsionali in
silicio-germanio
Con le simulazioni svolte fino ad ora, si è fatta un’analisi di travi sollecitate a torsione: la particolare configurazione che si è scelto di simulare è una delle due molle del risonatore torsionale discusso nel capitolo 2 (secondo paragrafo). Poiché non si è ancora tenuto conto della piezoresistività del diaframma, in questo capitolo si è simulato l’intero risonatore, per estrarre un valore di α e confrontarlo con quelli trovati per la singola trave (capitolo 3, tabella 3.1).
Nella seconda parte del capitolo, si sono studiate le frequenze di risonanza del sistema, richiamando i concetti espressi nel capitolo 2 (paragrafo 2.2). Questa analisi è stata fatta per verificare che le armoniche della tensione di uscita non eccitassero modi superiori al primo. I codici delle simulazioni svolte in questo capitolo sono contenuti nell’appendice F.
6.1 Simulazione
I valori delle costanti elastiche, dei coefficienti di piezoresistività e della resistività del materiale sono quelli della trave analizzata nel capitolo 2 (paragrafo 2.2.2). La geometria è, però, diversa: il risonatore è formato da un piatto sorretto da due molle incastrate agli estremi; sono presenti due fessure in corrispondenza degli estremi del piatto (la cui funzione è quella di assorbire eventuali tensioni residue delle molle) e una serie di buchi nel piatto stesso, che saranno trascurati, nella creazione della geometria. Si inizia la simulazione con ANSYS, creando il solido ed attribuendogli i gradi di libertà e le proprietà del materiale che lo compone. Successivamente, si crea
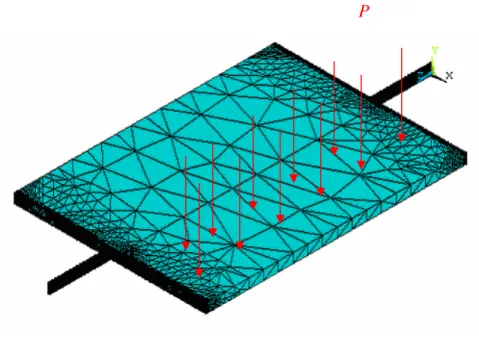
una griglia con elementi di tipo tetraedrico, che può essere infittita nelle zone di maggiore deformazione (molle e parti adiacenti); le figura 6.1 illustra l’andamento della griglia, che è rada nel volume del piatto, mentre si fa più fitta, spostandosi verso la molla.
FIGURA 6.1: Porzione del risonatore, dove si nota una molla ed una delle due fessure.
Con la prima simulazione, avvenuta in assenza di sollecitazioni meccaniche, è stato estratto il valore della resistenza R a riposo; si riportano i dati: 0
0 10 mA
I = Corrente applicata
0 2.45807061 V
V = Tensione misurata ai capi del risonatore (fra i due punti d’incastro)
0 245.807061
R = Ω Resistenza a riposo della struttura
TABELLA 6.1
A questo punto, bisogna applicare un momento torcente alla struttura.
Il risonatore viene inclinato per mezzo di una tensione (descritta nel capitolo 2, paragrafo 2), che esercita una forza elettrostatica che spinge verso il basso l’armatura superiore del condensatore.
d V
Si richiama la figura 2.4 (capitolo 2), dove le armature del condensatore sono estese solo dalla coordinata a alla coordinata b; la forza elettrostatica agente su un elemento
dell’armatura è la seguente [6]: dA
(
)
2 0 2 1 2 tan d E V dF dA = ε d−y θ ,dove d è la distanza iniziale fra le armature (quando l’angolo di torsione θ è nullo); la quantità
(
d−ytanθ)
è la stessa distanza, in funzione di y, quando θ ≠0. Per piccoli spostamenti angolari si può scrivere:2 2 0 2 1 d V dA dFE ε d ≅
Si ha quindi una relazione fra la variazione di forza elettrostatica (che può essere collegata al momento) e la tensione di attuazione. Il programma ANSYS non
permette di inclinare la struttura attraverso una tensione: per simulare la torsione, è necessario applicare una sollecitazione meccanica, sottoforma di forza o pressione. Pertanto si è scelto di applicare un valore equivalente di pressione P che producesse lo stesso effetto della forza elettrostatica:
P
FIGURA 6.2: Rappresentazione della pressione P che inclina il diaframma.
Si è scelto di procedere nel seguente modo: sono stati fissati quattro valori di pressione ed è stata lanciata una simulazione per ogni valore di pressione applicata. La tabella sottostante riporta i risultati, in termini di variazione di resistenza e di angolo, delle quattro simulazioni, in cui si è applicata una pressione del valore di 250, 500, 750 e 1000 Pa. L’angolo θ è stato calcolato osservando i risultati delle simulazioni, con lo stesso procedimento di calcolo utilizzato nel capitolo 3 (paragrafo 3.3.3):
P [Pa] ∆R [mΩ] θ [rad] θ [deg]
500 -13.052 0.0294 1.70
750 -29.063 0.0441 2.56
1000 -51.426 0.0587 3.40
TABELLA 6.2: Risultati delle simulazioni.
Si osserva che gli angoli ottenuti sono maggiori, rispetto all’angolo di pull in, di cui si è parlato nel secondo capitolo (paragrafo 2.2.2); pertanto, i valori di θ contenuti nella tabella 6.2 non sono fisicamente realizzabili, servono solo per estrarre una legge che leghi l’angolo alla variazione di resistenza.
Si osserva inoltre che la variazione di resistenza dipende in maniera quadratica dall’angolo di torsione: 2
R αθ
∆ = , anche in questo caso. I quattro valori di ∆R e di
θ ottenuti sono stati messi in un grafico: più precisamente, è stata disegnata per interpolazione la curva ∆R
( )
θ = α θ⋅ : tale curva presenta un andamento approssimativamente lineare ed il valore del coefficiente angolare α ha permesso di ricavare una stima del parametro α:298 . 14 − = α Ω2 rad ⎡ ⎤ ⎢ ⎥ ⎣ ⎦ (6.1)
Il valore della (6.1) dovrebbe essere il doppio del valore medio α dei parametri α ricavati nel capitolo 3 (tabella 3.1)1.
045 . 1 2α ≅ α
Si ottiene un errore del 4.5 %: questo è probabilmente dovuto al fatto che la struttura reale presenta due fessure (figura 6.1), che introducono due molle aggiuntive in serie alla molla di sostegno.
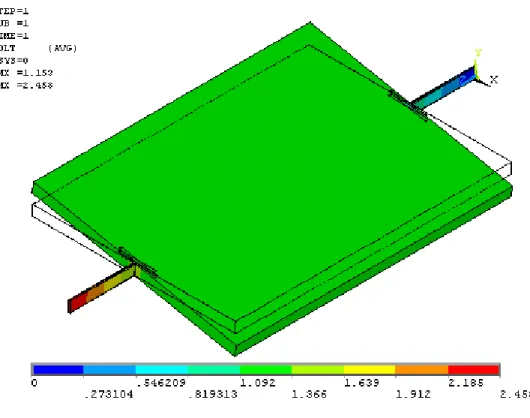
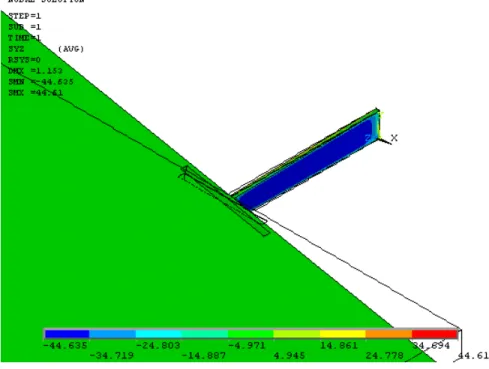
Si riportano due immagini delle simulazioni ANSYS: la prima (figura 6.3) illustra l’andamento della tensione lungo il solido sottoposto ad una pressione di 500 Pa. La seconda immagine (figura 6.4) riporta lo stress di taglio τ , in corrispondenza di yz un’estremità del dispositivo. Si nota che il piatto centrale dà un contributo quasi nullo alla differenza di potenziale globale, ed inoltre non subisce stress: il comportamento piezoresistivo della struttura può essere quindi studiato analizzando la sole molle.
FIGURA 6.4: Andamento di τ . yz
6.2 Analisi modale della struttura
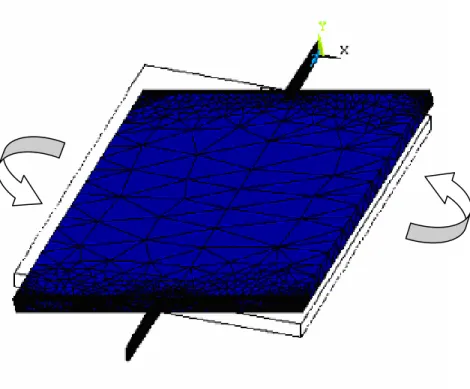
Il dispositivo presenta una serie di frequenze di risonanza (si ricordi quanto scritto nel capitolo 2 , paragrafo 2.2.2), che sono state estratte per mezzo di un’analisi modale con ANSYS. Si riportano di seguito i risultati relativi alle prime sei frequenze:
Prima frequenza di risonanza: ω01=24.195 kHz Seconda frequenza di risonanza: ω02 =57.477 kHz Terza frequenza di risonanza: ω03 =99.116 kHz Quarta frequenza di risonanza: ω04 =209.158 kHz Quinta frequenza di risonanza: ω05 =391.118 kHz Sesta frequenza di risonanza: ω06 =543.063 kHz
FIGURA 6.5: Immagine delle oscillazioni provocate dalla frequenza ω01.
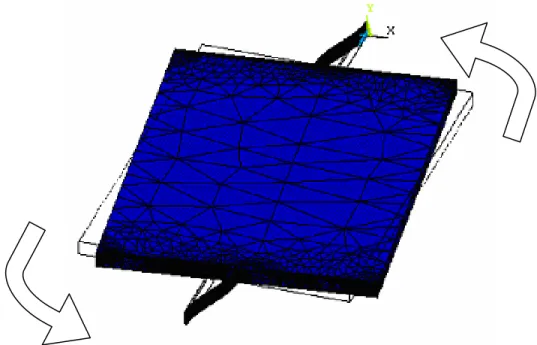
FIGURA 6.7: Frequenza ω03.
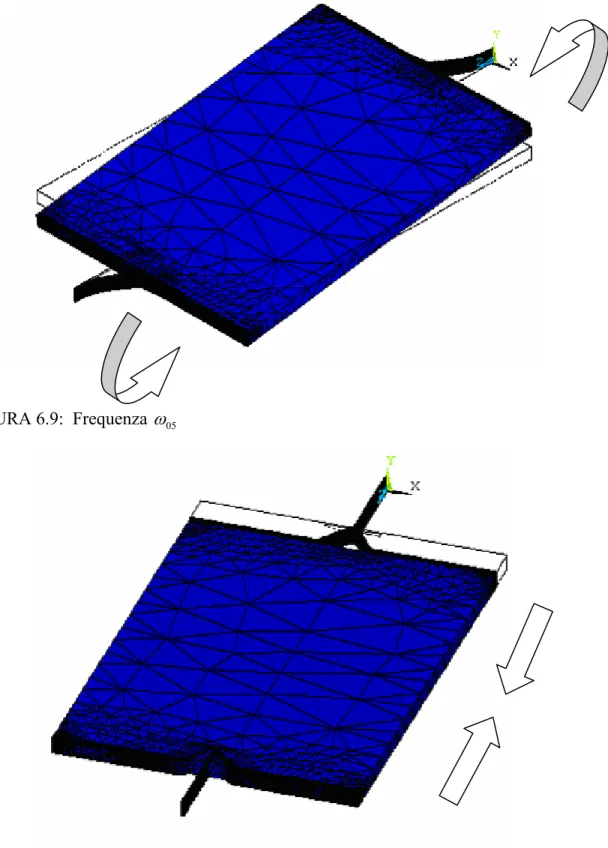
FIGURA 6.9: Frequenza ω05
A questo punto si è a conoscenza delle frequenze di risonanza, pertanto si richiama l’espressione della tensione di uscita, ricavata nel capitolo 2 (paragrafo 2.2.2):
[
]
2 2 2 2 2 1 1 1 0 0 2 2 2 1 1 0 1 0 1 ( ) (1 ) ( ) 2 ( ) 2 cos( ) 4 cos((2 ) ) cos((2 ) ) u p do d p do d p R t Q V t V t V V V t R R k Q V V V t t k θ θ α ε ε ζ ω ω ω ω ω ⎧⎡ ⎤ ⎛∆ ⎞ + ⎪⎢ ⎛ ⎞ ⎥ =⎜ + ⎟ = ⎨ + ⎜ ⎟ + ⎢ ⎥ ⎝ ⎠ ⎪⎣⎩ ⎝ ⎠ ⎦ ⎛ ⎞ +⎜ ⎟ + + − + ⎝ ⎠ C[
]
1 1 1 0 1 0 1 12 cos(( ) ) cos(( ) ) 2 cos( ) do d p p Q V V V t t V t kθ ζ ω ω ω ω ⎫ ε ω + + + − ⎬+ ⎭
dove ω0 è la prima frequenza di risonanza: ω0 =ω01=24.195 kHz.
Il segnale di uscita deve essere filtrato in corrispondenza di una frequenza lontana da quelle di risonanza (e loro multipli), perché potrebbe eccitare eventuali modi spuri; si è detto che conviene eliminare le componenti a frequenza ω1, per togliere il disturbo
1
2εVp cos(ω . Rimangono, quindi, le restanti frequenze: (1t) 2ω ω0± e 1 ω ω1± 0).
Si riprende la funzione di trasferimento del risonatore, discussa nel capitolo 2 (paragrafo 2.2.2):
( )
2 0 0 ( ) 1 1 ( ) 1 j H j M j k j Q θ ω ω ω ω ω ω ω Θ = = ⋅ ⎛ ⎞ −⎜ ⎟ + ⎝ ⎠Il risonatore è stato approssimato come un filtro con una componente continua
( )
0 1H
kθ
= , con un picco a frequenza ω0 del valore di H j
(
0)
Q kθω = e con altri picchi, in corrispondenza delle frequenze di risonanza superiori. Si suppone che il filtro abbia un fattore Q elevato (~100) e si discutono i valori delle frequenze in
uscita, per ω1 =70 kHz e ω1 =80 kHz, per valutare approssimativamente quale sia
la frequenza migliore, in termini di lontananza dalle varie ω0i (e loro multipli).
1 70 kHz
ω = :
1 2 0 120 kHz
ω + ω ≅ Vicina al doppio della seconda frequenza di risonanza del sistema.
1 2 0 20 kHz
ω − ω ≅ Vicina ad ω0.
1 0 95 kHz
ω ω+ ≅ Vicina alla terza frequenza di risonanza del sistema.
1 0 45 kHz
ω ω− ≅ Lontana dalle frequenze di risonanza.
Sembra che la frequenza più adatta sia ω ω1− 0
1 80 kHz
ω = :
1 2 0 130 kHz
ω + ω ≅ Lontana dalle frequenze di risonanza.
1 2 0 30 kHz
ω − ω ≅ Vicina ad ω0.
1 0 105 kHz
ω ω+ ≅ Vicina alla terza frequenza di risonanza del sistema.
1 0 55 kHz
ω ω− ≅ Vicina alla seconda frequenza di risonanza del sistema.
6.3 Conclusioni
In questo capitolo è stata simulata, con il programma ANSYS, una struttura risonante sollecitata a torsione. È stata ricavata la variazione di resistenza per diverse sollecitazioni meccaniche e sono state estratte le frequenze di risonanza. Confrontando i risultati ottenuti con quelli presenti nel capitolo 3 (dove si è simulato una singola molla del risonatore), si può affermare che, in una struttura del genere, la variazione di resistenza è causata prevalentemente dalle molle; il diaframma centrale, che in pratica non subisce deformazioni, è ininfluente dal punto di vista della misura piezoresistiva. Conoscendo il valore della prima frequenza di risonanza, infine, si è fatta una breve analisi quantitativa delle frequenze contenute nella tensione di uscita; si sono scelti due valori di ω1 (lontani da ogni frequenza di risonanza) e si sono tratte le seguenti conclusioni: se ω1=70 kHz, conviene filtrare (nella tensione di uscita) la
componente a frequenza ω ω1− 0, mentre con ω1=80 kHz è preferibile filtrare quella