Caso Studio:
Valutazione della Sicurezza
10.1 Introduzione
La verifica sismica è stata effettuata nel rispetto del DM 14\01\2008, combinando gli effetti dell’azione sismica con le altre azioni, in maniera opportuna e utilizzando gli adeguati coefficienti.
La Circolare Applicativa alle Norme Tecniche intende per valutazione della sicurezza un procedimento quantitativo volto a:
• stabilire se una struttura esistente è in grado o meno di resistere alle combinazioni delle azioni di progetto contenute nelle NTC, oppure
• a determinare l’entità massima delle azioni, considerate nelle combinazioni di progetto previste, che la struttura è capace di sostenere con i margini di sicurezza richiesti dalle NTC, definiti dai coefficienti parziali di sicurezza sulle azioni e sui materiali.
Le verifiche affrontate in questo lavoro fanno riferimento ad uno stato limite SLV, stato limite di salvaguardia della vita, considerando una classe d’uso IV (opere con funzione pubbliche o strategiche importanti) e una vita nominale
V
n paria 50 anni, così da definire un’azione sismica con periodo di ritorno pari a 949 anni.Una volta note le sollecitazioni dei singoli elementi costituenti il modello si può procedere alle verifiche degli stessi.
10.2 Verifiche di Sicurezza
Le verifiche di sicurezza per le costruzioni realizzate in murature possono innanzi tutto essere divise in due grandi gruppi:
• verifiche globali; • verifiche locali.
Infatti nella Circolare Applicativa alle norme tecniche si può leggere che per la valutazione degli edifici esistenti in muratura, oltre all’analisi sismica globale è da considerarsi anche l’analisi dei meccanismi locali.; soprattutto nel caso in cui la costruzione non manifesta un chiaro comportamento d’insieme, ma piuttosto tende a reagire al sisma come un insieme di sottosistemi, la verifica su un modello globale non ha rispondenza rispetto al suo effettivo comportamento sismico.
I vari meccanismi di collasso locali presi in considerazione verranno descritti nei paragrafi seguenti.
• pressoflessione nel piano;
• taglio-scorrimento o, per gli edifici esistenti, taglio diagonale; • pressoflessione fuori piano.
La determinazione della corrispondente resistente è ulteriormente diversificata nel caso in cui l’elemento considerato sia maschio o una fascia (definita anche come trave di accoppiamento).
10.3 Analisi Statica Lineare e Dinamica Modale
10.3.1 Verifica a pressoflessione nel piano
La verifica nei confronti dello stato limite ultimo (SLV), per collasso a pressoflessione nel piano delle pareti di muratura ordinaria è positiva se risulta:
u
d
M
M
≤Il momento ultimo resistente per un maschio murario con sezione rettangolare può essere calcolato con la seguente formula:
⋅
−
⋅
⋅
⋅
=
d uf
t
l
M
85
.
0
1
2
0 0 2σ
σ
Dove:-
M
u è il momento corrispondente al collasso per presso flessione; -l
è la lunghezza complessiva del pannello murario;-
t
è lo spessore della zona compressa del panello;-
σ
0 è la tensione normale media, riferita all’area totale della sezione (=P/lt, con P forza assiale agente positiva se di compressione). Se P è di trazioneM
u è uguale a zero;-
f
d è la resistenza a compressione di calcolo della muratura. Il momento ultimo si valuta considerando:- la muratura non reagente a trazione
- assumendo una distribuzione non lineare delle compressioni.
Secondo il punto C8.7.1.5 delle “Istruzioni per l’applicazione delle “Norme tecniche per le costruzioni” di cui al D.M. 14 gennaio 2008” nel caso di analisi elastica con il fattore q (analisi lineare statica e analisi dinamica modale con coefficiente di struttura), i valori di calcolo delle resistenze sono ottenuti dividendo i valori medi per i rispettivi fattori di confidenza (FC = 1.35) e per il coefficiente parziale di sicurezza dei materiali ( per il punto 7.8.1.1 del D.M. 14 gennaio 2008 per il progetto sismico di strutture in muratura γm = 2). Quindi si ha:
m d
f
f
γ
⋅ =10.3.2 Verifiche a taglio
Per gli edifici esistenti la rottura a taglio avviene principalmente per crisi da trazione e non per scorrimento, quindi è consentito calcolare la resistenza a taglio sulla sezione non parzializzata, tenendo conto sostanzialmente solo della coesione della muratura, attraverso:
d d t
b
t
l
V
0 0 0 5 , 1 1 5 , 1τ
σ
τ
⋅ + ⋅ ⋅ ⋅ ⋅ = dove:-
l
è la lunghezza del pannello; -t
è lo spessore del pannello;-
σ
0 è la tensione normale media, riferita all’area della sezione (=P/lt, con P forza assiale agente positiva se di compressione);-
τ
0d è la resistenza di calcolo a taglio della muraturam d
FC
γ
τ
τ
⋅ = 0 0 ;- b è un coefficiente correttivo legato alla distribuzione degli sforzi sulla sezione, dipendente dalla snellezza della parete. Si può assumere
b
=h
/l
, comunque non superiore a 1,5 e non inferiore ad 1, dove h è l’altezza del pannello murario.10.3.3 Verifiche a pressoflessione fuori piano
Per gli edifici in muratura la normativa prescrive che le verifiche delle pareti soggette ad azioni fuori dal piano possono essere svolte separatamente dalle altre analisi. La verifica nei confronti dello stato limite ultimo per collasso a pressoflessione fuori del piano delle pareti (ortogonale al piano), può essere eseguita, valutando dapprima le forze equivalenti sismiche distribuite (Fa), poi le azioni flettenti a metà altezza del pannello (si è utilizzato lo schema di doppia articolazione in testa e alla base e lati liberi) ed infine la resistenza della sezione.
L’effetto dell’azione sismica sulle pareti, viene generalmente valutata calcolando le forze equivalenti distribuite, previste per gli elementi non strutturali. Quindi in definitiva la forza risultante
a
F
, valutata nel baricentro della parete, è fornita dalla relazione:a a a a
q
W
S
F
= ⋅ dove: -W
a è peso dell’elemento;-
q
a è il fattore di struttura e può essere assunto pari a 3 (come riportato nel paragrafo 7.8.1.5.2 delle NTC);g
S
a
T
T
H
z
g
S
a
S
g a g a ⋅ ≥ − − + + ⋅ ⋅ ⋅ = 0,5 1 1 1 3 1 con:-
a
gS
accelerazione di progetto al suolo;-ag accelerazione massima del terreno su sottosuolo tipo A da considerare nello stato limite in esame;
-
S
prodotto del coefficiente stratigrafico e topografico,S
=S
s ⋅S
t ; -z altezza del baricentro della parete rispetto alla fondazione;-H altezza della struttura; -g accelerazione di gravità;
-
T
1 primo periodo di vibrazione della struttura nella direzione considerata (vedi analisi modale).-
T
a primo periodo di vibrazione della parete nella direzione considerata1 2
ω
π
= aT
[ ]
s
con − ⋅ ⋅ = crN
N
m
J
E
h
2 1 2 1π
ω
[
1/s
]
E
è il modulo elastico[
k N
/m
2]
;J
è il modulo di inerzia pari aJ
=l
⋅t
3/ 12[ ]
m
4 ;2 2
h
J
E
N
cr =π
⋅[ ]
k N
g
t
l
m
=γ
⋅ ⋅[
k g
/m
]
conγ
peso specificoIl momento flettente sollecitante nella mezzeria della trave vale:
2 8 1
h
p
M
v = ⋅ conp
=F
a /h
A tale momento va aggiunto il momento che proviene dall’analisi
M
d, che tiene conto dell’eccentricità dovuta ai carichi verticali, più va aggiunto anche il momento dovuto all’eccentricità accidentale definito come:a a
N
e
M
= ⋅ con 200h
e
a =Sommando tutti questi momenti si ottiene il momento sollecitante
M
s in mezzeria, mentre per quanto riguarda quello agli estremi nella sommatoria non va considerato il momentoM
v(avendoIl momento sollecitante deve essere confrontato con il momento ultimo seguendo la relazione: u
s
M
M
≤Con
M
u momento ultimo definito: ⋅ − ⋅ ⋅ ⋅ = d u
f
t
l
M
85 , 0 1 2 0 2 0σ
σ
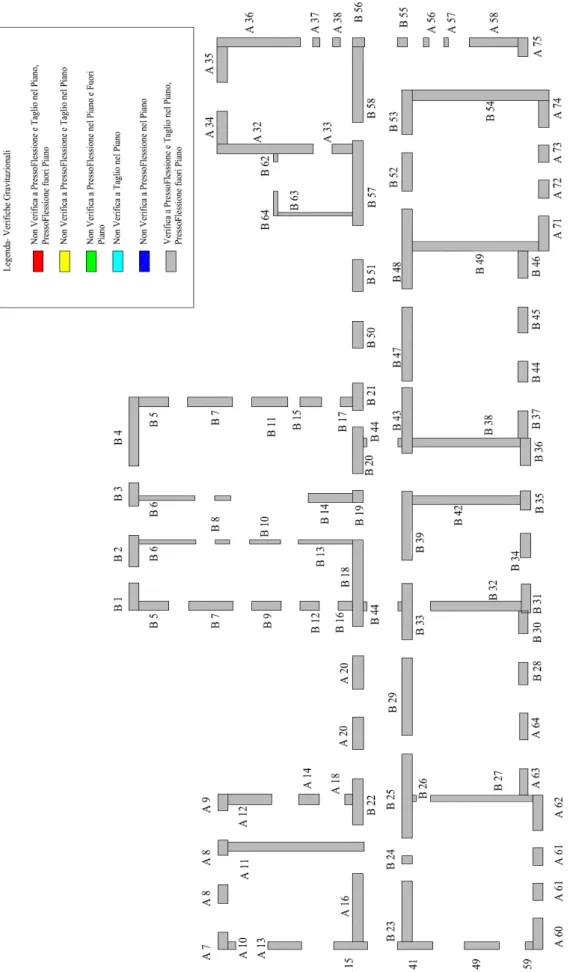
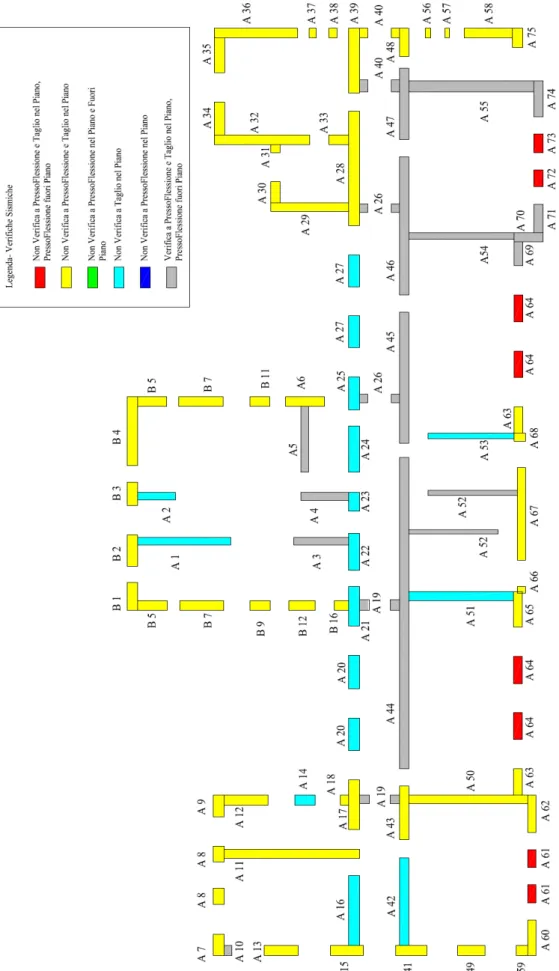
I risultati delle verifiche nel piano e fuori piano dei maschi murari sono riportati nel dettaglio, considerando tutte le combinazioni, nell’allegato al presente lavoro, mentre di seguito viene riportato un riassunto dei tali risultati per comprendere la situazione in cui versa la struttura in esame.
10.3.4 Verifiche delle fasce
Per quanto riguarda le travi di accoppiamento, o fasce, le Norme Tecniche 2008, nel caso in cui l’azione assiale orizzontale sia nota, propongono la verifica in analogia a quanto previsto per i pannelli murari verticali.
Nel caso in cui il modello di calcolo adottato non fornisca tale sollecitazione (ad esempio, quando l’analisi è svolta su modelli a telaio con l’ipotesi di solai infinitamente rigidi nel piano -caso in esame-) ma sono presenti, in prossimità delle fasce in muratura, elementi orizzontali dotati di resistenza a trazione (come catene o cordoli) in grado di far nascere un meccanismo resistente a puntone, i valori di resistenza associati ai meccanismi di rottura per taglio e pere presso flessione potranno essere assunti non superiori a quanto riportato al paragrafo 7.8.2.2 delle suddette norme.
Per le verifiche a pressoflessione la verifica è soddisfatta nel caso in cui si ha:
u
s
M
M
≤Cioè il momento flettente ottenuto dall’analisi deve essere minore o uguale a quello ultimo così definito: ⋅ ⋅ ⋅ − ⋅ ⋅ =
t
h
f
H
h
H
M
hd p p u 85 , 0 1 2dove h è altezza della fascia e t lo spessore della fascia. Con
H
p si deve considerare il minimo tra la resistenza a trazione dell’elemento teso presente (in questo caso il cordolo) e il valoreht
f
hd ⋅ ⋅ 4 , 0[
hd y d]
pf
ht
f
H
= mi n0,4⋅ ⋅ ;in cui
f
hd corrisponde alla resistenza di calcolo a compressione orizzontale della muratura. Nel caso in esame, per tenere conto dell’anisotropia della muratura si è deciso di considerare un valore di tale resistenza pari al valore della resistenza di calcolo a compressione verticale ridotta però del 50%.Per la verifica a taglio la relazione da considerare è la seguente:
u
s
V
V
≤Dove l’azione tagliante sollecitante è confrontata con un valore di taglio ultimo che rappresenta il valore minimo tra due azioni di taglio così definite:
[
p t]
uV
V
V
= mi n ;l
M
V
p = 2⋅ u 0τ
⋅ ⋅ =h
t
V
tdove h, t sono i dati geometrici della fascia o meglio altezza, spessore; con l si intende la lunghezza libera di inflessione della trave in muratura, che nel caso in esame è stata assunta pari alla
luce dell’elemento. Mentre
τ
0corrisponde la valore della coesione che è pari alla resistenza a taglio di calcolo della muratura.Di seguito viene riportato un esempio di verifica delle fasce, mostrando come tali elementi non partecipino alla resistenza globale dell’edificio. In tutti e quattro i piani le fasce soddisfano al massimo la verifica a taglio mentre non soddisfano mai le verifiche a pressoflessione sia nel piano che fuori piano.
VERIFICA A PRESSOFLESSIONE E TAGLIO NEL PIANO
Direzione Elemento L ( m) t (m) h (m) h / l b P (KN) σ0 (KN/mq) Mu (KNm)
X 1442 2,05 0,65 1,3 0,634 1,00 0 0 0 X 1442 2,05 0,65 1,3 0,634 1,00 0 0 0
Ms (KNm) VERIFICA Δ % Vu ( KN) Vs (KN) VERIFICA Δ % 4,86 NON VERIFICATO 44,42 22,55 VERIFICATO 49,23 -12,56 NON VERIFICATO 44,42 -25,71 VERIFICATO 42,12
VERIFICA A PRESSOFLESSIONE FUORI PIANO
Direzione Sezione Elemento L ( m) t (m) h (m) Wa (KN) X H 1442 2,05 0,65 1,3 31,1805 X H/2 1442 2,05 0,65 1,3 31,1805 X 0 1442 2,05 0,65 1,3 31,1805 ea (m) Ma (kNm) P (KN) σ0 (KN/mq) Mu (KNm) Ms (KNm) VERIFICA Δ % 0,0065 0 0 0,00 0,00 0,00 NON VERIFICATO 0,0065 0 0 0,00 0,00 0,00 NON VERIFICATO 0,0065 0 0 0,00 0,00 0,00 NON VERIFICATO
10.4 Analisi Statica non Lineare
10.4.1 Introduzione
L'analisi statica non lineare consiste nell'applicare all'edificio i carichi gravitazionali ed un sistema di forze orizzontali che, mantenendo invariati i rapporti relativi tra le forze stesse, vengano tutte scalate in modo da far crescere monotonamente lo spostamento orizzontale di un punto di controllo della struttura fino al raggiungimento delle condizioni ultime. Tale metodo di analisi è utilizzabile solo per le costruzioni il cui comportamento sotto la componente del terremoto considerata è governata da un modo di vibrare naturale principale, caratterizzata da una significativa partecipazione di massa.
L’analisi richiede che al sistema strutturale reale venga associato un sistema strutturale equivalente ad un grado di libertà:
Figura 10.16: Sistema e diagramma bilineare equivalente
La forza F* e lo spostamento d* del sistema equivalente sono legati alle corrispondenti grandezze Fb e dc del sistema reale dalle relazioni:
F*= Fb / Γ
d*= d
c/
Γ
dove Γ è il “fattore di partecipazione modale” definito dalla relazione
Γ =
𝝋𝑻𝑴𝝉𝝋𝑻𝑴𝝋
Il vettore è il vettore di trascinamento corrispondente alla direzione del sisma considerata; il vettore φ è il modo di vibrare fondamentale del sistema reale normalizzato ponendo dc = 1; la matrice M è la matrice di massa del sistema reale. Alla curva di capacità del sistema equivalente occorre ora sostituire una curva bilineare avente un primo tratto elastico ed un secondo tratto perfettamente plastico (vedi Figura C7.3.1). Detta Fbu la resistenza massima del sistema strutturale reale ed Fbu *=
Fbu / Γ la resistenza massima del sistema equivalente, il tratto elastico si individua imponendone il passaggio per il punto 0,6Fbu* della curva di capacità del sistema equivalente, la forza di plasticizzazione Fy* si individua imponendo l’uguaglianza delle aree sottese dalla curva bilineare e dalla curva di capacità per lo spostamento massimo du* corrispondente ad una riduzione di resistenza < 0,15Fbu .
Il periodo elastico del sistema bilineare è dato dall’espressione:
T* = 2π�
𝒎∗𝒌∗Dove m*=ΦTMτ e k* è la rigidezza del tratto elastico della bilineare.
Nel caso in cui il periodo elastico della costruzione T* risulti T*≥ Tc la domanda in spostamento per il sistema anelastico è assunto uguale a quello di un sistema di pari periodo:
d*
max= d*
e,max= Sed(T*)
Nel caso in cui T*< Tc la domanda in spostamento per il sistema anelastico è maggiore di quella di un sistema elastico di pari periodo e si ottiene da quest’ultima mediante l’espressione:
d*
max=
𝒅𝒆,𝒎𝒂𝒙∗
𝒒∗
[1+ (q*-1)
𝑻𝒄
𝑻
]
≥ d*
e,maxdove
q*= Se(T*) m*/F
y*
rappresenta il rapporto tra le forze di risposta elastiche e le forze disnervamento del sistema equivalente.
Se risulta
q*
≤ 1
allora si had*
max= d*
e,max.Una volta trovata la domanda in spostamento d*max per lo stato limite in esame si verifica che sia d*max≤ d*u e si procede alla verifica della compatibilità degli spostamenti per gli elementi/meccanismi duttili e delle resistenze per gli elementi/meccanismi fragili.
10.4.2 Pushover con Midas Gen
Per compiere le pushover richieste si è scelto di continuare a utilizzare il programma di calcolo Midas, che ci consente mediante il menù ad albero di avere sempre un controllo dei valori utilizzati in maniera semplice e intuitiva.
Si è quindi iniziato a impostare i valori di controllo della Pushover mediante il comando “pushover global control”, che ci permette di tenere in considerazione i pesi propri, portati e i sovraccarichi con i relativi coefficienti moltiplicatori.
Figura 10.17: Finestra di comando del Pushover Global Control
Nel caso in esame si è considerata un'unica tipologia di pushover, nelle due direzioni principali X e Y:
• Uniform Acceleration si applica alla struttura un’accelerazione costante fino alla rottura degli elementi;
• Mode shape si considera il modo di vibrare principale della struttura nella direzione considerata.
Sono stati quindi analizzati i seguenti casi: 1. Uniform acceleration X+;
2. Uniform acceleration X-;
3. Uniform acceleration Y+;
4. Uniform acceleration Y-;
5. Mode Shape X+;
6. Mode Shape X-;
7. Mode Shape Y+;
Si deve a questo punto considerare la resistenza dei maschi e delle fasce nel calcolo, questo ci viene permesso mediante il comando “Define Pushover Hinge Propertie”, di seguito vengono riportate le finestre di comando. Per normativa si deve imporre uno spostamento massimo per rottura a taglio pari a 0.4%, mentre 0.8% per rottura a pressoflessione.
Di seguito sono riportati i grafici di verifica in cui si riscontra la verifica o no dell’analisi paragonando tra di loro du e dmax, nel caso in cui du è maggiore di dmax la struttura verifica in caso
Figura 10.18: Spostamenti massimi ammessi da normativa per Taglio e Pressoflessione
10.4.3 Uniform Acceleration
Le verifiche sono state eseguite nel piano accelerazione-spostamento per permettere di inserire lo spettro allo SLV considerato nelle verifiche sismiche concedendo quindi non solo una verifica analitica ma anche grafica. Nei grafici si è mostrata la differenza d’inclinazione tra la curva bilineare della NTC 2008 e l’Euro codice, compiendo poi solo la verifica secondo NTC.
10.4.3.1 Uniform Acceleration X+
Si riportano i valori del sistema equivalente utilizzati nel calcolo:
m*(kNs2/m) 7477,83 Γ 1 Fy*(kN) 17122,1 T*(sec) 0,536 Se(T*)(g) 0,468 det*(m) 0,033 dt*(m) 0,033 dt(m) 0,033
La normativa, come detto in precedenza, per la verifica impone dmax≤ du nel seguente caso:
dmax (m) 0,033
Lo spostamento ultimo du* viene valutato considerando l’85% della resistenza massima del sistema strutturale reale: 0,00 0,50 1,00 1,50 2,00 2,50 3,00 3,50 4,00 0,000 0,010 0,020 0,030 0,040 0,050 A ccel era zi o n e ( m /s 2) Spostamento (m)
du (m) 0,036
10.4.3.2 Uniform Acceleration X-
Si riportano i valori del sistema equivalente utilizzati nel calcolo:
m*(kNs2/m) 7477,83 Γ 1 Fy*(kN) 17122,1 T*(sec) 0,536 Se(T*)(g) 0,468 det*(m) 0,033 dt*(m) 0,033 dt(m) 0,033
La normativa, come detto in precedenza, per la verifica impone dmax≤ du nel seguente caso:
dmax (m) 0,033
Lo spostamento ultimo du* viene valutato considerando l’85% della resistenza massima del sistema strutturale reale du (m) 0,036 0,00 0,50 1,00 1,50 2,00 2,50 3,00 3,50 4,00 0,000 0,005 0,010 0,015 0,020 0,025 0,030 0,035 0,040 0,045 0,050 A ccel era zi o n e ( m /s 2) Spostamento ( m )
10.4.3.3 Uniform Acceleration Y+
Si riportano i valori del sistema equivalente utilizzati nel calcolo:
m*(kNs2/m) 5973,31 Γ 1 Fy*(kN) 15083,8 T*(sec) 0,481 Se(T*)(g) 0,521 det*(m) 0,030 dt*(m) 0,030 dt(m) 0,030
La normativa, come detto in precedenza, per la verifica impone dmax≤ du nel seguente caso:
dmax (m) 0,0300299
Lo spostamento ultimo du* viene valutato considerando l’85% della resistenza massima del sistema strutturale reale: du (m) 0,037427129 0,00 0,50 1,00 1,50 2,00 2,50 3,00 3,50 4,00 0,000 0,010 0,020 0,030 0,040 0,050 0,060 A ccel era zi o n e ( m /s 2) Spostamento (m)
10.4.3.4 Uniform Acceleration Y-
Si riportano i valori del sistema equivalente utilizzati nel calcolo:
m*(kNs2/m) 5973,31 Γ 1 Fy*(kN) 15083,8 T*(sec) 0,481311 Se(T*)(g) 0,521879 det*(m) 0,0300299 dt*(m) 0,0300299 dt(m) 0,0300299
La normativa, come detto in precedenza, per la verifica impone dmax≤ du nel seguente caso:
dmax (m) 0,0300299
Lo spostamento ultimo du* viene valutato considerando l’85% della resistenza massima del sistema strutturale reale: du (m) 0,037427129 0,00 0,50 1,00 1,50 2,00 2,50 3,00 3,50 4,00 0,000 0,010 0,020 0,030 0,040 0,050 0,060 A ccel era zi o n e ( m /s 2) Spostamento (m)
10.4.4 Mode Shape
Nel mode shape si fa riferimento al modo di vibrare principale della struttura sia secondo X che Y. Nella tabella sottostante sono riportati i primi 20 modi di vibrare della struttura che ci permettono di arrivare a una massa partecipante superiore all’85 %, sono stati evidenziati quelli predominanti nelle due direzioni.
In giallo si evidenzia il modo di vibrare che verrà utilizzato nella direzione Y, mentre in verde quello che verrà utilizzato in X.
Mode No
TRAN-X TRAN-Y ROTN-Z
MASS(%) SUM(%) MASS(%) SUM(%) MASS(%) SUM(%)
1
0 0 0,0192 0,0192 0,0116 0,01162
0 0 0,0193 0,0385 0,0156 0,02723
0,018 0,018 0 0,0385 0,0009 0,02814
0,0147 0,0327 52,0658 52,1043 20,8192 20,84735
8,9823 9,015 16,9824 69,0867 45,7654 66,61276
65,1799 74,1948 2,7667 71,8534 6,2107 72,82347
0,002 74,1968 0,0236 71,877 0,0009 72,82438
0,0122 74,2091 9,6389 81,516 4,3663 77,19069
11,5798 85,7889 0,0588 81,5748 0,0076 77,198310
0,0664 85,8553 5,9788 87,5536 10,2601 87,458411
0,0071 85,8624 0,0198 87,5734 0,0003 87,458712
0,0212 85,8836 0,0039 87,5773 0,0281 87,486813
0,0014 85,885 0,0003 87,5776 0,0006 87,487414
0,0136 85,8987 0,0006 87,5782 0,0003 87,487715
0,0137 85,9124 0,0022 87,5804 0,0007 87,488516
0,0105 85,9229 0 87,5805 0,0011 87,489617
0,0243 85,9472 0,0002 87,5806 0,0055 87,495118
0 85,9472 0 87,5806 0 87,495119
0 85,9472 0 87,5806 0 87,495120
0,0268 85,974 0,011 87,5916 0,012 87,507110.4.4.1 Mode Shape X+
Si riportano i valori del sistema equivalente utilizzati nel calcolo:
m*(kNs2/m) 7937,26 Γ 0,942 Fy*(kN) 12814,4 T*(sec) 0,632 Se(T*)(g) 0,397 det*(m) 0,039 dt*(m) 0,039 dt(m) 0,037
La normativa, come detto in precedenza, per la verifica impone dmax≤ du nel seguente caso:
dmax (m) 0,037
Lo spostamento ultimo du* viene valutato considerando l’85% della resistenza massima del sistema strutturale reale: du (m) 0,026 0,00 0,50 1,00 1,50 2,00 2,50 3,00 3,50 4,00 4,50 0,000 0,005 0,010 0,015 0,020 0,025 0,030 0,035 0,040 0,045 A ccel era zi o n e ( m /s 2) Spostamento (m)
10.4.4.2 Mode Shape X-
Si riportano i valori del sistema equivalente utilizzati nel calcolo:
m*(kNs2/m) 7937,26 Γ 0,942117 Fy*(kN) 12814,4 T*(sec) 0,632 Se(T*)(g) 0,397 det*(m) 0,039 dt*(m) 0,039 dt(m) 0,037
La normativa, come detto in precedenza, per la verifica impone dmax≤ du nel seguente caso:
dmax (m) 0,037
Lo spostamento ultimo du* viene valutato considerando l’85% della resistenza massima del sistema strutturale reale: du (m) 0,026 0,00 0,50 1,00 1,50 2,00 2,50 3,00 3,50 4,00 4,50 0,000 0,005 0,010 0,015 0,020 0,025 0,030 0,035 0,040 0,045 A ccel era zi o n e ( m /s2 ) Spostamento (m)
10.4.4.3 Mode Shape Y+
Si riportano i valori del sistema equivalente utilizzati nel calcolo:
m*(kNs2/m) 3540,95 Γ 1,68692 Fy*(kN) 4787,3 T*(sec) 0,680 Se(T*)(g) 0,369 det*(m) 0,042 dt*(m) 0,042 dt(m) 0,071
La normativa, come detto in precedenza, per la verifica impone dmax≤ du nel seguente caso:
dmax (m)* 0,071
Lo spostamento ultimo du* viene valutato considerando l’85% della resistenza massima del sistema strutturale reale: du (m) 0,066 0,00 0,50 1,00 1,50 2,00 2,50 3,00 3,50 4,00 0,000 0,010 0,020 0,030 0,040 0,050 0,060 0,070 0,080 0,090 A ccel era zi o n i ( m /s2 ) Spostamento (m)
10.4.4.4 Mode Shape Y-
Si riportano i valori del sistema equivalente utilizzati nel calcolo:
m*(kNs2/m) 3540,95 Γ 1,68692 Fy*(kN) 4787,3 T*(sec) 0,680 Se(T*)(g) 0,369 det*(m) 0,042 dt*(m) 0,042 dt(m) 0,071
La normativa, come detto in precedenza, per la verifica impone dmax≤ du nel seguente caso:
dmax (m) 0,071
Lo spostamento ultimo du* viene valutato considerando l’85% della resistenza massima del sistema strutturale reale: du (m) 0,066 0,00 0,50 1,00 1,50 2,00 2,50 3,00 3,50 4,00 0,000 0,010 0,020 0,030 0,040 0,050 0,060 0,070 0,080 0,090 A ccel era zi o n i ( m /s2 ) Spostamento (m)
10.5 Verifiche locali: Meccanismi di Collasso Locali
Le recenti Norme Tecniche del 2008, in accordo con l’ordinanza OPCM 3274/03, stabiliscono la necessità di valutare la sicurezza degli edifici esistenti in muratura nei riguardi dei meccanismi locali ed indicano le relative metodologie di analisi. Infatti la valutazione della sicurezza sismica degli antichi edifici in muratura va eseguita, oltre che con riferimento al comportamento sismico globale (come visto fino ad ora), anche considerando l’eventualità che si verifichino meccanismi locali di collasso. Nella Circolare Applicati alle NTC2008 si può leggere:
“L’applicazione del metodo di verifica presuppone quindi l’analisi dei meccanismi locali ritenuti significativi per la costruzione, che possono essere ipotizzati sulla base della conoscenza del
comportamento sismico di strutture analoghe, già danneggiate dal terremoto, o individuati considerando la presenza di eventuali stati fessurativi, anche di natura non sismica; inoltre andranno tenute presente la qualità della connessione tra le pareti murarie, la tessitura muraria, la presenza di
catene, le interazioni con altri elementi della costruzione o degli edifici adiacenti.”
Meccanismi di risposta di questo tipo, generalmente meno resistenti e meno duttili di quelli che coinvolgono la risposta d’insieme del fabbricato, devono essere quindi opportunamente considerati nella definizione di un modello di analisi che sia realmente rappresentativo del comportamento sismico strutturale. Il primo aspetto dell’analisi riguarda quindi il riconoscimento delle condizioni che predispongono all’attivazione di meccanismi locali di danno e collasso e quindi la valutazione della necessità di effettuare analisi cinematiche in sostituzione o in integrazione di analisi della risposta globale del sistema. L’individuazione delle modalità di collasso significative per gli edifici si compie dunque innanzitutto attraverso la ricerca di sconnessioni, presenti o che possono formarsi nella compagine muraria a causa delle azioni sismiche, che individuano macroelementi (porzioni più o meno estese della struttura muraria che, nel caso di murature di adeguata qualità, si comportano monoliticamente) suscettibili di instabilità. Ciò comporta sinteticamente:
• l’esame delle caratteristiche tecnologiche e costruttive dell’edificio (tipologie e collegamenti di murature ed orizzontamenti, presenza di presidi antisismici, ecc.), accompagnato, laddove possibile, dall’analisi storica delle trasformazioni da esso subite, particolarmente rivolto alla valutazione della qualità e delle condizioni di vincolo degli elementi resistenti che costituiscono la fabbrica;
• l’osservazione di eventuali quadri fessurativi e dei dissesti provocati dai terremoti passati sulla struttura, rivolta all’individuazione degli indicatori che possono suggerire i meccanismi di collasso già attivati;
• lo studio e la conoscenza del comportamento sismico di strutture analoghe già danneggiate dal terremoto che consente di interpretare correttamente le informazioni precedenti e stabilire opportune correlazioni tra tipologie costruttive, danneggiamenti presenti e meccanismi di collasso possibili, fornendo validi parametri di valutazione della risposta sismica della struttura.
Infatti notevole importanza hanno avuto gli studi affrontati analizzando i danneggiamenti apportati dai sismi passati sugli edifici in muratura antichi.
I principali meccanismi di collasso locale possono essere riassunti in: • ribaltamento semplice;
• ribaltamento composto; • flessione verticale; • flessione orizzontale.
Le caratteristiche di tali meccanismi sono state ampiamente già descritte nel capitolo riguardante le strutture in muratura, di seguito verrà riportato un sunto per comprendere meglio le cause di una possibile attivazione di uno di questi danni, poi di seguito l’argomento verrà affrontato dal punto di vista teorico, illustrando il principio con cui ci si debba approcciare allo studio del singolo meccanismo ed infine tali meccanismi verranno applicati alla struttura in esame.
RIBALTAMENTO SEMPLICE
COME SI MANIFESTA QUANDO SI MANIFESTA
Prevede la rotazione rigida di facciate interne o porzioni di pareti rispetto ad assi prevalentemente orizzontali (cerniere cilindriche) alla base di esse e che percorrono la struttura sollecitata dalle azioni sismiche ad essa ortogonali
Si manifesta quando il muro investito dall’azione sismica risulta libero in sommità e non efficacemente collegato alle pareti di controvento. Le condizioni per l’attivazione sono quindi l’assenza di dispositivi di collegamento (cordoli o catene) in testa alla tesa ribaltante in corrispondenza degli orizzontamenti e l’assenza di efficaci connessioni nelle intersezioni murarie (angolate e martelli murari di cattiva qualità o male ammorsati).
RIBALTAMENTO COMPOSTO
Il ribaltamento della parete è accompagnato al trascinameto di una porzione di struttura muraria appartenente alle pareti di controvento.
Le intersezioni murarie presentano connessioni adeguate tra le murature che confluiscono in un nodo, ma sono assenti efficaci vincoli di connessione in testa alla parete investita dal sisma.
FLESSIONE VERTICALE
Si ha la formazione di una
cerniera cilindrica orizzontale che divide la
parete in due blocchi ed attorno alla quale essi ruotano mutamente.
Si ha per pareti efficacemente vincolate agli estremi (al piede ed in testa alla tesa muraria) e libere nella zona centrale. Il meccanismo è favorita dalla cattiva qualità del muratura, dalla snellezza della parete e spinte orizzontali come archi e volte.
FLESSIONE ORIZZONTALE
Si manifesta con l’espulsione di materiale dalla zona sommatale della
parete conseguente al
distacco di corpi cuneiformi che ruotano attorno a cerniere cilindriche oblique.
Si ha in pannelli murari efficacemente vincolati alle pareti ortogonali con il lato sommatale non trattenuto da alcun dispositivo. È il caso di pareti trattenute agli estremi da catene e non vincolate in sommità e dalla cattiva qualità della muratura.
Tabella 2: schema riassuntivo sui meccanismi di collasso locali
10.5.1 Analisi Cinematica Non Lineare
Ai fini dell’analisi secondo la procedura non lineare è richiesta innanzitutto la quantificazione del moltiplicatore orizzontale dei carichi agenti sugli elementi strutturali
α
0, rapporto tra le forze orizzontali applicate ed i corrispondenti pesi delle masse presenti, che porta all’attivazione dei cinematismi di collasso locali significativi. Ciò può avvenire in base alle indicazioni apportate nell’allegato C8A paragrafo C8A.4.1 della Circolare Applicativa alle Norme Tecniche, mediante l’applicazione dell’analisi limite dell’equilibrio secondo l’approccio cinematico.L’applicazione del metodo prevede innanzi tutto la trasformazione di una parte della costruzione in un sistema labile, attraverso l’individuazione di corpi rigidi (macroelementi) definiti da superfici di fratture, ipotizzabili per la scarsa resistenza a trazione della muratura, in corrispondenza delle quali può avvenire la rotazione o lo scorrimento che definiscono l’evoluzione del meccanismo. Questo vuol dire innanzitutto definire uno schema di calcolo nel quale risulti completamente descritta la geometria dei macroelementi instabili ipotizzati, le condizioni di vincolo e le forze su di essi agenti; rappresentate da: pesi propri, carichi verticali portati (pesi propri e sovraccarichi dei solai e della copertura, altri eventuali elementi murari non considerati nel modello strutturale), spinte statiche, eventuali ulteriori forze esterne (ad esempio quelle trasmesse da catene metalliche), eventuali forze interne (ad esempio le azioni legate all’ingranamento tra i conci) ed un sistema di forze orizzontali, le inerzie dei corpi, proporzionali ai carichi verticali portati, se queste non sono efficacemente trasmesse ad altre parti dell’edificio.
È in seguito necessario esprimere la condizione di equilibrio del sistema così definito in funzione del moltiplicatore
α
0 incognito e, a tal fine, si fa ricorso all’applicazione del Principio dei Lavori Virtuali in termini di spostamenti, uguagliando il lavoro totale eseguito dalle forze esterne ed interne applicate al sistema in corrispondenza dell’atto di moto virtuale che descrive il cinematismo. Questo prevede in particolare:- l’analisi del problema cinematico virtuale per la valutazione degli spostamenti dei punti di applicazione delle forze, compatibili con l’atto di moto virtuale del sistema labile;
- la scrittura dell’Equazione dei Lavori Virtuali, in funzione di
α
0, per la valutazione delle condizioni di equilibrio limite del sistema di forze reali applicate ai corpi.Quindi si deve imporre l’equazione dei Lavori Virtuali (equazione numero C8A.4.1 riportata nella Circolare) espressa in funzione del moltiplicatore
α
0 cercato, compiuti dal sistema di forze (reali), agenti sui corpi che costituiscono la catena cinematica, nel sistema di spostamenti (virtuali) congruenti in corrispondenza dell’atto di moto definito dal cinematismo di danno. Da questa equazione si fatta si esplicitaα
0, che rappresenta il massimo valore del moltiplicatore orizzontale dei carichi sopportabili dal sistema in esame in condizioni di equilibrio limite.Una volta definito il moltiplicatore
α
0 si può determinare la massa partecipante al cinematismo analizzato con la seguente formula:∑
∑
+ = + = ⋅ ⋅ ⋅ = m n i i x i m n i i x iP
g
P
M
1 , 2 2 1 , *δ
δ
Successivamente, utilizzando sia il moltiplicatore
α
0 e la massa partecipanteM
*si può arrivare alla valutazione dell’accelerazione sismica spettralea
0*, cioè l’accelerazione per cui si ha l’attivazione del meccanismo di danno, così definita:FC
M
P
a
m n i i ⋅ ⋅ =∑
+ = * 1 0 * 0α
con FC il corrispondente fattore di confidenza.
A questo punto si deve calcolare l’accelerazione normalizzata
a
g(SLV) da confrontare con l’accelerazione di riferimentoa
g( )
P
VR dello spettro utilizzato nell’analisi, secondo espressione riportata in allegato alla circolare C.8D.9:( )
VR g SLV ga
P
g
S
q
a
a
> ⋅ ⋅ = 0* ) ( dove :• q rappresenta il fattore di struttura pari a 2 come riportato in circolare al paragrafo C8D.2.3; • S è il coefficiente che tiene conto della categoria di sottosuolo e delle condizioni
topografiche ed è pari a
S
=S
t ⋅S
s ; • g è l’accelerazione di gravità.Se il meccanismo locale interessa una porzione della costruzione posta ad una certa quota, si deve tener conto del fatto che l’accelerazione assoluta alla quota della porzione di edificio interessata dal cinematismo è in genere amplificata rispetto a quella al suolo, per tanto oltre all’espressione precedente si deve verificare anche la seguente disuguaglianza
( )
( )
1 * 0 ) (S
T
Z
q
a
S
eSLV > e ⋅ ⋅ =γ
ψ
dove:
•
ψ
( )
z
è il primo modo di vibrazione nella direzione considerata, normalizzato ad 1 in sommità dell’edifico; in assenza di valutazioni più accurate può essere assunto pari a( )
z
=z
H
ψ
, dove H è l’altezza della struttura rispetto alla fondazione;•
Z
è l’altezza rispetto alla fondazione dell’edificio del baricentro delle linee di vincolo tra i blocchi interessati dal meccanismo e il resto della struttura;•
γ
è il corrispondente coefficiente di partecipazione modale, che in assenza di valutazioni più accurate può essere assunto pari aγ
= 3N
(2N
+ 1), con N numero di piani dell’edificio;•
T
1 è il primo periodo di vibrazione dell’intera struttura nella direzione considerata;•
S
e( )
T
1 è l’accelerazione dello spettro di progetto allo SLV calcolata in corrispondenza di1
T
.10.5.1.1 Meccanismo di ribaltamento semplice
Il primo passo da compiere consiste nel definire la geometria dei corpi ribaltanti e quindi nel tracciare uno schema di calcolo quanto più possibile verosimile. Se l’edificio da analizzare non presenta alcun tipo di danneggiamento, si deve accertare la possibilità dell’instaurarsi di un meccanismo semplice di ribaltamento a partire dalle condizioni di vincolo della parete; successivamente è possibile ipotizzare la geometria coinvolta nel cinematismo prendendo il considerazione ulteriori fattori come la presenza di aperture o la qualità della muratura.
Una volta definita la geometria del macroelemento coinvolto si determina lo schema di calcolo applicando le condizioni di vincolo ed i carichi agenti sul sistema. Inoltre, in condizioni sismiche, a ciascun carico verticale corrisponde un carico orizzontale calcolato come il prodotto del carico verticale considerato per il coefficiente sismico
α
0. Tale moltiplicatore di collasso delle forze orizzontali è valutato imponendo le condizioni di equilibrio che il sistema di forze agenti deve rispettare in condizioni di incipiente ribaltamento. Si procede quindi alla valutazione del momento delle forze che determinano il ribaltamento del corpo attorno alla cerniera cilindrica considerata (momento ribaltante) e quello delle forze che si oppongono a tale rotazione (momento stabilizzante).Il momento stabilizzante è dato da:
h
T
d
P
d
F
s
W
M
SA = ⋅ + V ⋅ v + S ⋅ + ⋅ 2 ) (Il momento ribaltante è pari a:
(
W
y
F
h
P
h
)
F
h
P
h
M
S(A) =α
0 ⋅ ⋅ G + V ⋅ v + S ⋅ + H ⋅ v + S ⋅h
P
h
F
y
W
h
P
h
F
h
T
d
P
d
F
s
W
S v V G H V H S v V ⋅ + ⋅ + ⋅ ⋅ + ⋅ + ⋅ + ⋅ + ⋅ + ⋅ = 2 0α
Figura 11.20: schema di calcolo per il meccanismo di ribaltamento semplice Dove:
-
W
è il peso proprio della parete;-
F
V è la componente verticale della spinta di archi o volte sulla parete; -F
H è la componente orizzontale della spinta di archi o volte sulla parete; -P
S è il peso del solaio agente sulla parete calcolato in base all’area di influenza; -P
H rappresenta la spinta statica trasmessa dalla copertura;-
T
rappresenta il valore massimo dell’azione di un eventuale tirante in testa alla parete; - s è lo spessore della parete;-
h
è l’altezza della parete rispetto alla cerniera A ;-
h
V è la quota del punto di applicazione della spinta di archi o volte rispetto alla cerniera in A;-
d
è la distanza orizzontale del punto di applicazione del carico del solaio sulla parete rispetto ad A;-
d
V è la distanza orizzontale dalla cerniera A del punto di applicazione diF
V; -α
0 è il moltiplicatore delle forze orizzontali.Si sottolinea che la posizione del baricentro della parete rispetto alla cerniera cilindrica attorno alla quale si attiva il cinematismo, ed in particolare la distanza verticale di questa dal punto di applicazione del peso proprio del corpo, permette di considerare nel calcolo la reale geometria in facciata del macroelemento ribaltante. Infatti, la presenza di aperture nella parete generalmente modifica la posizione del baricentro della stessa e comporta quindi una variazione nella valutazione del momento ribaltante.
Inoltre si può parlare di ribaltamento semplice di una parete a più piani, poiché si possono avere dei ribaltamenti su diversi livelli che interessano più piani.
In questo caso valgono le stesse osservazioni fatte precedentemente, si determinano quindi le condizioni di equilibrio in corrispondenza della formazione della cerniera cilindrica posta generalmente in B come mostrato dal nuovo schema di calcolo, riportato di seguito.
Figura 11.21: schema di calcolo per il ribaltamento semplice a più piani
10.5.1.2 Meccanismo di ribaltamento composto
L'attivazione di cinematismi di questo tipo richiede la presenza di un buon ammorsamento delle pareti ortogonali coinvolte, garantito da cantonali correttamente eseguiti. con assenza di connessioni efficaci in testa al macroelemento ribaltante, come per il caso di ribaltamento semplice. Il meccanismo è favorito poi, oltre che dalla presenza di coperture spingenti anche dalla scadente fattura delle pareti di controvento.
La qualità della muratura costituente le pareti ortogonali alla facciata condiziona la definitone delle dimensioni del cuneo di distacco e quindi anche l'entità del coefficiente sismico
α
0 associato al cinematismo;α
0 aumenta all'aumentare della porzione di muratura coinvolta nel ribaltamento.Come per gli altri meccanismi esaminati occorre quindi innanzitutto definire una attendibile geometria dei macroelementi interessati dal cinematismo e lo schema di calcolo al quale fare riferimento. Anche in questo caso, la presenza di un quadro fessurativo prodotto da precedenti terremoti e caratterizzato da lesioni diagonali nella parete facilita l'individuazione dei macroelementi, ed è necessario solo il rilievo della loro geometria.
Quando invece l'edificio da esaminare è ancora integro e necessario verificare la possibilità dall'attivazione di un meccanismo di ribaltamento composto di una parte di esso sulla base delle condizioni di vincolo; solo successivamente si può definire la geometria dei corpi coinvolti tenendo conto delle caratteristiche dell'edificio. In particolare, la definizione del cuneo di distacco e fortemente influenzata, oltre che dalla qualità della muratura costituente la parete di controvento, anche dalla presenza di aperture in prossimità del nodo in cui confluiscono le murature ortogonali. Quanto peggiore e la qualità muraria tanto minore risulta, generalmente, l'angolo formato dalla diagonale del cuneo trascinato nel ribaltamento con la verticale.
Come nel caso di ribaltamento semplice bisogna poi considerare la possibilità che nel meccanismo siano compromessi diversi livelli di un edifico, in relazione all'assenza di efficaci vincoli di connessione tra la parete investita dal sisma ed i diversi solai intermedi.
Lo schema di calcolo su cui impostare l'equazione di equilibrio è il seguente: •
W
è il peso proprio della parete di facciata;•
W
0 è il peso proprio del cuneo di distacco (comprensivo di eventuali carichi trasmessi da archi o volte su di esso agenti);•
F
V è la componente verticale della spinta di archi o volte sulla parete;Figura 11.22: schema di calcolo
•
F
H è la componente orizzontale della spinta di archi o volte sulla parete:•
P
S è il peso del solaio o della copertina sulla parete calcolato in base all'area di influenza: •P
S0 è il peso del solaio agente sul cuneo calcolato in base all'area di influenza:•
P
H è la spinta statica trasmessa dalla copertura;• T è l'azione del tirante eventualmente presente in testa alla parete; • s è lo spessore della parete di facciata;
• h è l'altezza della parete di facciata rispetto alla cerniera in A o comunque la quota del punto di applicazione dell'azione trasmessa dai solai o dai tiranti rispetto alla cerniera A;
•
h
v è la quota del punto di applicazione della spinta di archi o volte rispetto alla cerniera A; • d è la distanza orizzontale del punto di applicazione del carico del solaio sulla parete difacciata rispetto alla cerniera in A;
•
d
v è la distanza orizzontale del punto di applicazione del carico di archi o volte sulla parete di facciata rispetto alla cerniera in A;•
d
0 è il braccio orizzontale del punto di applicazione del carico trasmesso dal solaio sul cuneo di distacco rispetto alla cerniera in A;•
x
g0è la distanza orizzontale del baricentro del cuneo di distacco rispetto alla cerniera in A; •y
g è la quota del baricentro della parete di facciata rispetto alla cerniera in A;Il cinematismo di ribaltamento composto di cuneo diagonale può coinvolgere più piani. È il caso in cui in corrispondenza dei solai l'edificio è privo di dispositivi in grado di contrastare il ribaltamento della parete su diversi livelli. In tal caso bisogna considerare la possibilità che la parete, sottoposta anche alla spinta sismica esercitata dai solai, subisca il ribaltamento attorno a diverse posizioni della cerniera cilindrica, coinvolgendo più piani dell'edificio. Valgono le stesse osservazioni fatte per il ribaltamento composto di un cuneo diagonale ad un piano; si determinano le condizioni di equilibrio ipotizzando la formazione di una cerniera cilindrica posta genericamente in B (come riportato in figura seguente).
Figura 11.23: schema di calcolo
Definito lo schema di calcolo il procedimento per impostare l’equazione di equilibrio è il medesimo visto prima.
Altro tipo di ribaltamento composto è rappresentato dal cuneo a doppia diagonale.
Rispetto al caso precedente questo tipo di meccanismo si manifesta con il ribaltamento della parete di facciata accompagnato dal distacco e trascinamento di un elemento a doppia diagonale appartenente alla parete di controvento. La forma del macroelemento così definita è dovuta generalmente alla presenza di solai rigidi, solitamente realizzati in laterocemento o comunque dotati di una soletta annata, o cordoli in c.a. non efficacemente ancorati alla muratura sottostante; questi, pur non rappresentando un vincolo al ribaltamento della parete di facciata, ma in presenza di cantonali correttamente eseguiti, impediscono l'innalzamento della porzione superiore di muratura della parete di spina. Le condizioni che fanno presumere l'attivazione di un cinematismo di ribaltamento composto di cuneo a doppia diagonale sono quindi rappresentate da: efficaci connessioni tra le murature ortogonali, assenza di vincoli che impediscono il ribaltamento della parete investita dal sisma e presenza di vincoli di carattere geometrico che limitano gli spostamenti verticali, conseguenti alla rotazione attorno alla cerniera cilindrica orizzontale, della parete di controvento. In effetti questo tipo di cinematismo si manifesta più generalmente in quegli edifici che hanno subito interventi di consolidamento.
Si osserva poi che nel caso di orizzontamenti molto rigidi e dotati di cordolatura in c.a., assume importanza il fenomeno dinamico del colpo di frusta, nella parte sommitale delle murature poste ortogonalmente alla direzione del sisma. Questo può indurre infatti ima rotazione rigida dell'orizzontamento, che tende a sollevarsi dalla parete, determinando un effetto di decompressione delle murature sottostanti le quali, restando prive dell'azione di contenimento esercitata dai carichi sovrastanti, collassano sotto l'azione dell'accelerazione orizzontale.
10.5.1.3 Meccanismo di flessione verticale
Il meccanismo di flessione verticale di una parete trattenuta in sommità si manifesta, per effetto delle azioni ortogonali al piano della stessa, con formazione di una cerniera cilindrica orizzontale, che divide la struttura muraria in due blocchi rigidi ed attorno alla quale essi ruotano reciprocamente fino al collasso. La combinazione delle azioni verticali ed orizzontali sulla parte determina l’istaurarsi di una sorta di effetto arco verticale nella stessa per cui le forze orizzontali si scaricano sui vincoli agli estremi della tesa muraria. Se però, queste ultime superano un certo valore, le azioni verticali non sono più sufficienti a contrastare l’effetto instabilizzante del momento flettente e ciò determina l’instaurarsi del cinematismo descritto.
Come per tutti i meccanismi, se l’edificio presenta dei danneggiamenti l’impostazione dello schema di calcolo per impostare il cinematismo può partire dall’analisi di tale fessurazioni, ma se l’edificio non presenta alcun danneggiamento, una volta accertata la possibilità dell’instaurarsi di un meccanismo di flessione verticale a partire dalle condizioni di vincolo della parete, è l’analisi stessa del cinematismo che permette di definire la geometria dei macroelementi coinvolti nel meccanismo in relazione alle condizioni di equilibrio dei corpi.
Come si è già descritto tale meccanismo si manifesta per edifici che presentano ai vari livelli efficaci vincoli di connessione tra solai e le pareti. L’analisi del coefficiente di collasso deve essere condotta indipendentemente per tutti i piani dell’edifico ai quali il seguente schema può essere applicato. -
W
è il peso proprio del maschio murario;-
F
V è la componente verticale della spinta di archi ovolte sulla parete;
-
F
H è la componente orizzontale della spinta di archi o volte sulla parete; -P
S è il peso del solaio agente sulla parete calcolato in base all’area di influenza; Figura 10.24: Schema di calcolo-
N
è il peso trasmesso alla parete dalle murature e dai solai dei livelli superiori; - s è lo spessore della parete;-
h
è l’altezza della parete;-
h
V è la quota del punto di applicazione della spinta di archi o volte rispetto al carrello B;-
d
è la distanza orizzontale dalla cerniera B del punto di applicazione del carico trasmesso dai piani superori;-
d
V è la distanza orizzontale tra il punto di applicazione diF
V ed il corrispondente polo di riduzione (carrello B);- a è la distanza orizzontale della cerniera B del punto di applicazione del carico trasmesso dal solaio sulla parete.
L’analisi consiste nell’individuare la posizione della cerniera che corrisponde al minimo valore del moltiplicatore di collasso
α
0 delle forze orizzontali che determina l’attivazione del cinematismo.Come per i precedenti meccanismi si deve applicare l’equazione dei Lavori Virtuali, però in questo caso in termini di spostamento. Si procede quindi all’analisi del problema cinematica del sistema di corpi rigidi, assegnando una rotazione virtuale unitaria al corpo 1.
Considerando le condizioni di congruenza e quelle di vincolo, si ottiene un’espressione del moltiplicatore di collasso in funzione di un parametro, che altro non rappresenta l’altezza della cerniera lungo la quale avviene il cinematismo. Annullando la derivata del moltiplicatore, rispetto a tale parametro, si ottiene la quota minima a cui posizionare la cerniera per far si che si possa innescare il cinematismo.
Il meccanismo di flessione verticale si può anche manifestare tra due piani di un edificio, quando la muratura risulta essere ben collegate alle estremità, ma il solaio intermedio non trattenuto.
10.5.1.4 Meccanismo di Rottura del Timpano
Lo sfondamento della parete del timpano attiva un meccanismo di flessione orizzontale caratterizzato dall’individuazione di macroelementi cuneiformi che ruotano attorno a cerniere cilindriche oblique. Il meccanismo in questione è associato all’assenza di collegamenti adeguati tra la struttura muraria del timpano e la copertura che poggia su questa; è provocata dall’azione ciclica di martellamento della trave di colmo che determina la formazione di macroelementi di distacco e la conseguente rotazione degli stessi attorno a cerniere oblique. Una condizione che favorisce l’innescarsi del meccanismo è la presenza di una trave di colmo di notevoli dimensioni che, in fase sismica, trasmette una elevata spinta alla parete determinando l’instaurarsi della condizioni di instabilità.
Il meccanismo di sfondamento della parete del timpano può interessare diverse geometrie dei macroelementi coinvolti, in relazione alla presenza di aperture in prossimità della copertura e della qualità muraria, ed uno o entrambi i parametri nel caso di parete a doppia cortina. In particolare la presenza di aperture nella parete del timpano influisce sulla progressione del cinematismo, poiché condiziona la definizione dei macroelementi che tendono a coinvolgere la porzione di parete al di sopra di questa.
Figura 10.25: Schema di calcolo
Per definire la geometria dei corpi coinvolti nel meccanismo è necessario fissare l’angolo di inclinazione α delle cerniere oblique rispetto all’orizzontale. Si osserva a tale riguardo che più l’angolo α risulta ridotto tanto più il meccanismo di sfondamento della parete del timpano p uò essere assimilato ad un meccanismo di ribaltamento semplice attorno ad una cerniera cilindrica orizzontale alla sua base. Al contrario, quanto più le cerniere cilindriche assumono un andamento verticale tanto più il cinematismo in questione si avvicina a quello di flessione orizzontale.
Nella figura 10.25:
Wi è il peso proprio del macroelemento; P è il carico trasmesso dalla trave di colmo;
PVij rappresenta l’i-esimo carico verticale trasmesso in testa al macroelemento j-esimo; s è lo spessore della parete del timpano,
α è l’inclinazione della sezione di frattura che individua il macroelemento rispetto all’orizzontale;
dp è l’arretramento del punto di applicazione dell’i-esimo carico verticale in testa al macroelemento j-esimo rispetto alla superficie esterna della parete del timpano;
dij è l’arretramento del punto di applicazione dell’i-esimo carico verticale in testa al macroelemento j-esimo rispetto alla superficie esterna della parete del timpano:
xGi è la distanza, misurata lungo l’asse locale xi, del baricentro del macroelemento i-esimo rispetto al proprio polo ( punto A );
xp è la distanza, misurata lungo l’asse xi, del colmo della parete rispetto al punto A;
xPVij è la distanza, misurata lungo l’asse locale xi, del punto di applicazione della i-esima forza verticale applicata in testa al macroelemento j-esimo rispetto al proprio polo ( punto A).
10.5.2 Introduzione al caso in esame
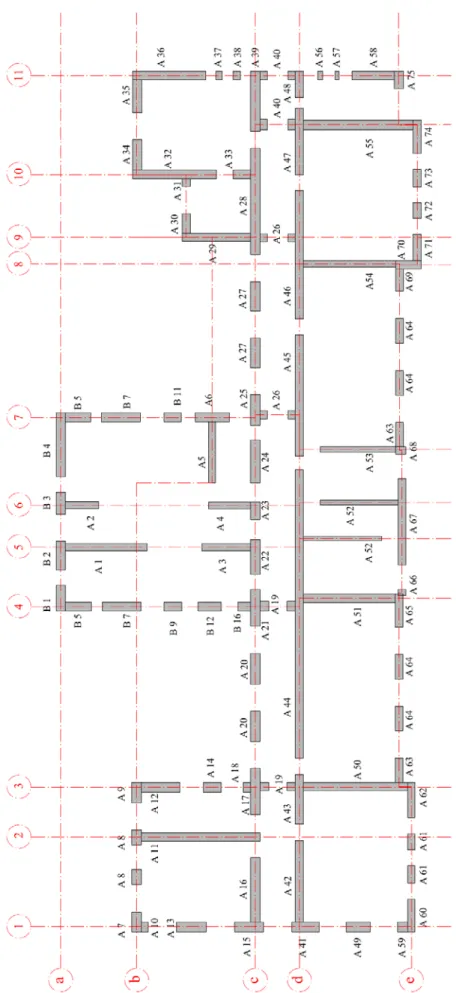
Nella struttura in esame, per la verifica a ribaltamento semplice e composto, sono stati individuati i seguenti prospetti in cui sono state compiute le verifiche:
Figura 10.26: Pianta dei prospetti in esame Di seguito è riportato un caso esempio per ogni verifica svolta.
10.5.2.1 Ribaltamento semplice
Dopo aver introdotto in precedenza questo meccanismo è stato possibile fare già le prime considerazioni. Nell’edificio in esame è presente una copertura realizzata mediante capriata in legno con la presenza della catena che comporta una spinta orizzontale sul paramento murario pari a zero. Un elemento che va a sfavore della presente analisi è la mancanza di cordoli in cemento armato nella muratura, questo potrebbe portare alla formazione del suddetto cinematismo. A tale proposito per la verifica è stato utilizzato un programma chiamato CINE,che è stato adattato di volta in volta in base al caso considerato.
Essendo presenti quattro piano nell’edificio sono stati valutati e verificati i seguenti casi:
Figura 10.27: Schemi di calcolo
Nelle tabelle sottostanti sono riportati i dati di base della facciata A, il programma ci permette a questo punto di valutare il moltiplicatore dei carichi α0 e l’accelerazione spettrale a*0 dati di base per la verifica.
Elevazione
GEOMETRIA DELLA FACCIATA (*)
Peso specifico
della muratura gi [kN/m3]
Altezza delle fasce murarie Larghezza delle fasce murarie
Quota del sottofinestra [m] Quota del soprafinestra [m] Larghezza della fascia sottofinestra al netto delle aperture [m] Larghezza della fascia intermedia al netto delle aperture [m] Larghezza della fascia soprafinestra al netto delle aperture [m] 1 1,00 4,44 18,34 10,35 18,34 18,0 2 1,00 3,90 20,40 10,35 20,40 18,0 3 1,00 4,00 20,40 10,35 20,40 18,0 4 1,00 3,42 20,40 10,35 20,40 18,0
Elevazione Spessore della parete al piano i-esimo si [m] Altezza di interpiano al piano i-esimo hi [m] Braccio orizzontale del carico del solaio al piano i-esimo rispetto alla cerniera cilindrica di [m] Braccio orizzontale dell'azione di archi o volte al piano i-esimo rispetto alla cerniera cilindrica dVi [m] Quota del punto di applicazione di azioni trasmesse da archi o volte al piano i-esimo hVi [m] Quota del baricentro della parete al piano i-esimo yGi [m] 1 0,70 4,63 0,00 0,00 0,00 2,12 2 0,50 4,32 0,00 0,00 0,00 2,02 3 0,50 4,57 0,00 0,00 0,00 2,18 4 0,50 4,02 0,00 0,00 0,00 1,93 Elevazione Peso proprio della parete al piano i-esimo Wi [kN] Peso proprio della parete al piano i-esimo (**) Wi [kN] Carico trasmesso dal solaio al piano i-esimo PSi [kN] Spinta statica della copertura PH [kN] Componente verticale della spinta di archi o volte al piano i-esimo FVi [kN] Componente orizzontale della spinta di archi o volte al piano i-esimo FHi [kN] 1 723,6 0,0 25 0,0 0,0 2 530,8 0,0 0,0 0,0 3 567,7 0,0 0,0 0,0 4 519,2 55,0 0,0 0,0
MOMENTO DELLE AZIONI STABILIZZANTI
Ribaltamento delle elevazioni:
Peso proprio delle pareti [kNm] Carico dei solai
[kNm]
Azione di archi o
volte [kNm] Azione dei tiranti [kNm]
4 - 3 - 2 - 1 657,7 0,0 0,0 0,0
4 - 3 - 2 404,4 0,0 0,0 0,0
4 - 3 271,7 0,0 0,0 0,0
4 129,8 0,0 0,0 0,0
MOMENTO DELLE AZIONI RIBALTANTI
Ribaltament o delle elevazioni:
Inerzia delle pareti [kNm] Inerzia dei solai
[kNm] Inerzia di archi o volte [kNm] Spinta statica di archi o volte [kNm] Spinta statica della copertura [kNm] 4 - 3 - 2 - 1 19402,2 964,7 0,0 0,0 438,5 4 - 3 - 2 10377,2 710,1 0,0 0,0 322,8 4 - 3 4611,3 472,5 0,0 0,0 214,8 4 999,8 221,1 0,0 0,0 100,5
Ribaltamento delle elevazioni: Valore di a0 Fattore di Confidenza FC Massa partecipante M* Frazione massa partecipante e* Accelerazione spettrale a0* [m/sec2] 4 - 3 - 2 - 1 0,011 1,35 177,783 0,728 0,107 4 - 3 - 2 0,007 130,446 0,765 0,070 4 - 3 0,011 91,897 0,789 0,103 4 0,024 53,993 0,922 0,189 PARAMET RI DI CALCOLO Fattore di struttura q 2,00 Coefficiente di amplificazione topografica ST 1,00
Categoria suolo di fondazione C PGA di riferimento ag(PVR) [g] 0,155
Fattore di amplificazione massima dello spettro FO 2,443
Periodo di inizio del tratto a velocità costante dello spettro TC* [sec] 0,273
Fattore di smorzamento h 0,417 Altezza della struttura H [m] 21,14 Coefficiente di amplificazione stratigrafica SS 1,473
Coefficiente CC 1,612
Fattore di amplificazione locale del suolo di fondazione S 1,473 Numero di piani dell'edificio N 4 Coefficiente di partecipazione modale g 1,333 Primo periodo di vibrazione dell'intera struttura T1 [sec] 0,493
Ribaltamento delle elevazioni: Baricentro delle linee di vincolo Z [m] y(Z) = Z/H ag(SLV) (C8A.4.9) Se(T1) (C8A.4.10) 4 - 3 - 2 - 1 0,015 4 - 3 - 2 4,63 0,219 0,010 0,479 4 - 3 8,95 0,423 0,014 0,365 4 13,52 0,640 0,026 0,443 0,0966 1,6940 1,6940 0,8470 θ 0,1232 δx,k 1,5903 dk,o 1,5903 δx1 0,7951 0,1783 1,5313 1,5313 0,7656 0,3396 1,3651 1,3651 0,6826 0,8470 0,9640 0,8470 0,3388 d* 0,7951 a0* 1,1717 do* 0,7951 du* 0,3181 0,7656 1,6584 0,7656 0,3063 0,6826 2,7828 0,6826 0,2730
0,8098 0,1355 2,5704 π 3,1416 as* 0,9842 ds* 0,1272 Ts 2,2590 1,3930 0,1225 1,8632 2,3375 0,1092 1,3581
Analisi Cinematica Lineare
Piano
a
0*
q ψ(Z) Se(T1) γa
g*
a
g1 0,964 0,000 0,000 1,333 0,134 0,155
2 1,172 2 0,219 0,227 1,333 0,163 0,155
3 1,658 0,423 0,227 1,333 0,230 0,155
4 2,783 0,640 0,227 1,333 0,385 0,155
S ag(Pvr)S/q C8A.4.9 Se(T1) ψ(z) γ/q C8A.4.10
0,114 VERIFICATO 0,000
1,473 0,033 VERIFICATO
0,064 VERIFICATO
0,097 VERIFICATO
Analisi Cinematica Non Lineare
du* ds* as* π Ts Se(Ts) T Sde(Ts)
0,339 0,136 0,810 2,570 0,038 0,002 0,318 0,127 0,984 3,142 2,259 0,491
0,306 0,123 1,393 1,863 0,273 0,109 2,338 1,358
C8A.4.11 ψ(Z) Se(T1) γ T1 Sde(T1) C8A.4.12
VERIFICATO
0,219 0,227 1,333 0,493 0,018 0,030 VERIFICATO 0,423 0,227 1,333 0,493 0,018 0,051 VERIFICATO 0,640 0,227 1,333 0,493 0,018 0,065 VERIFICATO
Caso 1(4-3-2-1)
Verifica grafica
Nel grafico la verifica è soddisfatta se l’incontro della curva di domanda con la retta con periodo Ts* è minore dello spostamento ultimo du*.
0 0,02 0,04 0,06 0,08 0,1 0,12 0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 α0 dko Curva di Capacità 0 0,5 1 1,5 2 2,5 3 3,5 4 0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 A ccel era zi o n e ( m /s 2) Spostamento (m)
Caso 2(4-3-2) Verifica grafica 0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 α0 dko Curva di Capacità 0 0,5 1 1,5 2 2,5 3 3,5 4 0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 A ccel era zi o n e ( m /s 2) Spostamento (m)
Caso 3(4-3) Verifica grafica 0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16 0,18 0,2 0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 α0 dk0 Curva di Capacità 0 0,5 1 1,5 2 2,5 3 3,5 4 0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 A ccel era zi o n e ( m /s 2) Spostamento (m)
Caso 4( 4 ) Verifica grafica 0 0,05 0,1 0,15 0,2 0,25 0,3 0,35 0,4 0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 α0 dk0 Curva di Capacità 0 0,5 1 1,5 2 2,5 3 3,5 4 4,5 5 0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 A ccel era zi o n e ( m /s 2) Spostamento (m)
10.5.2.2 Rottura del Timpano
Nella facciata C è presente una copertura a capanna di sotto alla quale si potrebbe riscontrare un meccanismo che provoca la rottura del timpano. Nella figura sottostante si evidenzia l’area interessata e di seguito si riporta la verifica del meccanismo.
Figura 10.28: Prospetto in cui si evidenzia il Timpano.
CARATTERIZZAZIONE GEOMETRICA DELLA PARETE
Spessore della parete s [m] Inclinazione delle sezioni di frattura rispetto all'orizzontal e b [°] Arretramento del punto di applicazione dell'azione trasmessa dalla trave di colmo rispetto alla superficie esterna del timpano dP [m] Arretramento dei punti di applicazione dei carichi verticali in testa al corpo i-esimo rispetto alla superficie esterna del timpano dij [m] Distanza del baricentro del corpo i-esimo dall'origine, misurata con riferimento all'asse locale xi xGi [m] Distanza del punto di applicazione dell'i-esimo carico verticale in testa al corpo 1 dall'origine, misurata con riferimento all'asse locale x1 xPVi1 [m]
Distanza del punto di applicazione dell'i-esimo carico verticale in testa al corpo 2 dall'origine, misurata con riferimento all'asse locale x2 xPVi2 [m] 0,65 45 0,33 0,33 1,44 0,78 0,46 -1,18 1,32 -2,99 2,39
AZIONI SULLA PARETE
Arretramento del punto di contatto tra i cunei (cerniera
C) rispetto alla superficie esterna
del timpano a [m] Peso proprio del
corpo i-esimo Wi [kN] Carico trasmesso dalla trave di colmo P [kN] Carico verticale i-esimo trasmesso in testa al corpo 1 PVi1 [kN]
Carico verticale i-esimo trasmesso in testa al corpo
2 PVi2 [kN] 160,0 0,0 15,0 15,0 0,00 15,0 15,0 15,0 15,0
Figura 20.29: Schema di calcolo Valore di a0 Fattore di Confidenza FC Massa partecipante M* Frazione massa partecipante e* Accelerazione spettrale a0* [m/sec2] 0,200 1,35 24,107 0,946 1,537 Baricentro delle linee di vincolo Z [m] y(Z) = Z/H ag(SLV) (C8A.4.9) Se(T1) (C8A.4.10) 17,580 0,840 0,213 2,743
Analisi Cinematica Lineare
a0* q ψ(Z) Se(T1) Se(T1) ψ(z) γ/q C8A.4.10
1,537 2,25 0,840344168 0,227175773 0,113129384 VERIFICATO
Analisi Cinematica Non Lineare
θ H δx,k dk,o Distanza verticale dove applico W δxw δx1p δxipv d* 0,197 2,000 0,395 0,095 0,675 0,133 0,395 0,365 0,621 1,850 0,247 1,250 0,049 0,250
a0* do* du* π as* ds* Ts