IV.3
Determinazione della legge di moto del baricentro della
capsula
Sino a questo punto dell’analisi è stato possibile fare ipotesi minime sulla geometria finale della capsula endoscopica oggetto di studio di questa tesi.
Il nuovo problema che si intende affrontare e risolvere richiede però la conoscenza dettagliata delle leggi di moto delle varie articolazioni.
La conseguenza più ovvia di questo fatto è quindi la necessità di quantificare almeno le dimensioni principali di quest’ultimo nonché di definire le caratteristiche della catena cinematica realizzante ciascuna zampa.
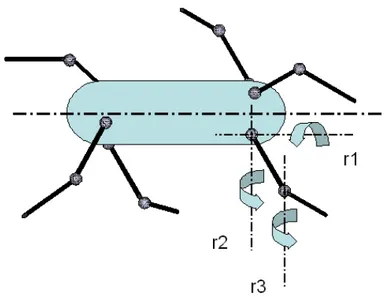
Il corpo della capsula è costituito da un cilindro di 20 mm di lunghezza chiuso alle estremità da due gusci semisferici di raggio 5 mm, per un ingombro assiale massimo di 30 mm.
Per quanto riguarda le zampe, queste sono costituite da due links lunghi 8 mm. Il primo è vincolato al corpo attraverso un joint a due gradi di libertà in rotazione (r1 ed r2, è impedita quella attorno all’asse dello stesso elemento).
Un terzo grado di libertà (r3) è invece garantito dal joint di connessione tra gli i due links che permette la rotazione attorno ad un asse ortogonale al piano individuato dai centri dei joints e dall’estremo libero della zampa.
In questo modo ogni arto è in grado di raggiungere una regione dello spazio circostante piuttosto ampia, permettendo eventualmente l’impostazione di leggi di moto piane, con possibilità di variazione dell’orientamento di questi attorno all’asse del condotto a seconda delle specifiche esigenze del caso.
Rimane valido ovviamente quanto già è stato definito nei paragrafi precedenti: si prende a riferimento una soluzione a sei articolazioni, tre anteriori e tre posteriori a 120 gradi le une rispetto alle altre, ruotando di ulteriori 60 gradi la seconda terna rispetto alla prima.
Per l’analisi sono stati utilizzati due differenti sistemi di riferimento. L’uno è fisso e ha origine O al centro del condotto, asse x coincidente con quello del substrato, y e z ad individuare un piano trasversale secondo una terna Cartesiana e levogira (si noti che non sono necessarie altre particolari ipotesi sul loro orientamento). Rispetto a questo è quindi stato definito il moto (in termini di spostamenti e rotazioni) del corpo del dispositivo endoscopico. L’altro, ancora Cartesiano e levogiro, è invece solidale a quest’ultimo e ha origine Oc posta nel baricentro G dello stesso, asse xc coincidente con quello della capsula, yc e zc come i precedenti ad individuare un generico piano trasversale.
Note le leggi di moto delle zampe, che descrivono il moto dei punti Qi rispetto a G, la posizione assoluta di questi, istante per istante, è quindi stata ottenuta, utilizzando la classiche relazioni della cinematica per la composizione dei moti, come somma di un contributo di trascinamento, il primo, e di uno relativo, il secondo.
Come già accennato in fase di introduzione a questo capitolo, l’idea che sta alla base del lavoro qui descritto è quella di pensare il moto come una sequenza di configurazioni di equilibrio statico.
Utilizzando il file già scritto per il calcolo delle componenti delle forze risultanti Fij (componente j-esima della forza applicata alla zampa i-esima) e dei momenti Mij rispetto a G (gli indici hanno lo stesso significato precedente) applicati a ciascuna articolazione, è stato sufficiente introdurre in questo i comandi per la definizione e quantificazione di un parametro di controllo, chiamato Sommatoria e rappresentativo dello stato di sollecitazione complessivamente presente, dato dalla somma dei quadrati delle Fij e delle Mij stesse.
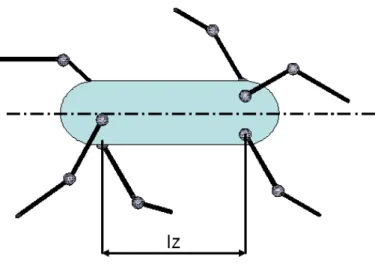
In particolare per rendere dimensionalmente omogenei i termini sommati i secondi sono stati divisi per una lunghezza di riferimento (10 mm), pari alla metà della distanza assiale lz tra le sezioni di montaggio delle articolazioni sul corpo:
Fig. IV.11 Indicazione della lunghezza di riferimento lz
Partendo da una configurazione iniziale nota (si suppone che i due sistemi di riferimento siano perfettamente sovrapposti) sono stati applicati a G degli spostamenti esplorativi (e delle rotazioni) all’interno di una regione dello spazio circostante di ampiezza pari ai massimi valori assunti dalle stesse grandezze (relative ai Qi) tra due istanti successivi di analisi. In particolare, per un frazionamento in cento parti del periodo tipico di moto, i valori utilizzati sono stati di 4 mm e di 6 gradi.
L’idea di fondo è infatti quella di individuare la sequenza dei movimenti di G che permettono di minimizzare il corrispondente valore di Sommatoria.
Già scegliendo però un campionamento grossolano (10 parti) le possibili configurazioni da calcolare sono in numero decisamente molto elevato per poter portare ad una soluzione in tempi ragionevolmente limitati.
Per questo si è deciso di seguire una strada un pò differente. Per prima cosa è stato analizzato il comportamento del sistema assegnando un solo spostamento esplorativo nella direzione x. Trovato il relativo minimo si è quindi sovrapposto al primo un secondo spostamento esplorativo, questa volta secondo y, ed è stata individuata la successiva configurazione approssimante l’equilibrio statico, funzione ora di due dati e non più di uno soltanto. Procedendo allo stesso modo sono stati in seguito sovrapposti anche i quattro rimanenti termini trovando alla fine un vettore soluzione a sei componenti che caratterizza completamente il moto di trascinamento della capsula nello step considerato.
L’adozione di tale strategia ha però comportato la necessità di introdurre nel file scritto un successivo ciclo di controllo dei risultati.
Il risultato ottenuto è infatti funzione dell’ordine in cui i vari movimenti sono stati esplorati. Per ovviare a ciò si è quindi deciso di ricalcolare iterativamente la soluzione sino a che i dati in uscita non evidenzino una adeguata stabilità. Così per prima cosa il sistema è stato nuovamente testato nella direzione x, assumendo però una configurazione di partenza differente da quella iniziale. La capsula lungo x stesso è stata infatti riportata in zero mentre per gli altri spostamenti e rotazioni di G sono stati assunti i valori precedentemente determinati. In questo modo è stato ottenuto un secondo valore dello spostamento attraverso una nuova minimizzazione. In modo analogo sono quindi stati testati gli altri gradi di libertà arrivando alla fine ad avere un secondo vettore soluzione. Questo è stato confrontato con il primo. In presenza di differenze evidenti tra i risultati il processo iterativo è stato portato avanti secondo la stessa tecnica, conservando ora i dati trovati al passo due, e si è continuato a questo modo sino all’individuazione di una condizione di ragionevole stabilità delle uscite.
Assunte queste ultime come espressione del moto di trascinamento del corpo del dispositivo, sono quindi state aggiornate le posizioni dei punti Qi per l’analisi del nuovo step, condota in modo analogo al precedente.
L’unica differenza presente sta nella fase di controllo dei risultati in cui i vari termini testati non stati azzerati come sopra ma posti uguali al valore complessivo del relativo moto di trascinamento ottenuto al passo precedente.
Lo strumento Matlab™ che ne segue fornisce quindi in uscita una matrice a sei colonne lungo le quali sono riportati i valori degli spostamenti e delle rotazioni del dispositivo passo per passo, permettendo di utilizzare discretizzazioni più o meno fitte della legge di moto delle zampe in funzione delle varie possibili esigenze, descrivendone infine il moto risultante.
Tali risultati in prospettiva, una volta ottimizzate opportunamente dette leggi di moto e settati definitivamente i parametri caratteristici dell’analisi, potranno essere impiegati per la realizzazione di simulazioni del moto della capsula all’interno di un tratto di intestino che rappresenteranno il primo concreto risultato lungo la strada della produzione di uno strumento adatto alle prime verifiche sperimentali..
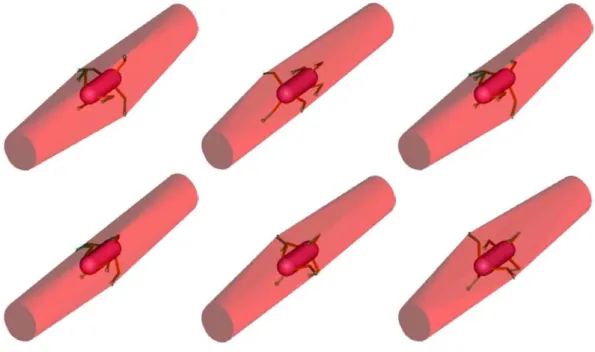
Per il momento sono stati realizzati dei filmati del sistema che non hanno ancora la pretesa di darne una rappresentazine realistica ma che hanno principalmente una funzione di presentazione di massima del modello sin qui prodotto.
Tali filmati sono stati ottenuti attraverso un lavoro di montaggio delle immagini reso piuttosto complesso dalla necessità di garantire il sincronismo tra il modello del substrato
(realizzato in Matlab™ ) e quello della capsula (realizzato invece in Pro/Engineer 2001®) durante il moto e reso possibile dall’impiego programmi di editing video.
Qui di seguito sono riportate alcune immagini estratte dai video citati: