CAPITOLO 5: Confronto tra il modello
ADAMS e il codice ABS
5.1 INTRODUZIONE
In questa parte di lavoro si sono condotti i test per confrontare i due diversi simulatori: quello Simulink nella sua ultima versione con tutte le function in C++, con quello sviluppato in ADAMS. Il modello ADAMS utilizzato in questa parte è quello con i pneumatici interamente personalizzati che sono stati costruiti appositamente, utilizzando le stesso modello matematico dei pneumatici del simulatore Simulink e le stesse curve caratteristiche.
Si è scelto di confrontare i due modelli su un test di frenata.
Inizialmente si confrontano caratteristiche “misurabili” come gli outputs dei due modelli e i tempi di calcolo; in seguito si includono nella valutazione anche caratteristiche più qualitative, come la versatilità o la semplicità dell’interfaccia utente.
Infine si esprimono alcune considerazioni generiche sui due ambienti di programmazione, Matlab-Simulink e ADAMS.
5.2 TEST DI FRENATA 5.2.1 Inizializzazione
Nel caso del programma ADAMS le simulazioni iniziano sempre dalla configurazione in cui è stato disegnato il modello. In questo caso la configurazione non corrisponde a quella di equilibrio perché l’aereo non è appoggiato al suolo e non ha il suo peso già distribuito su pneumatici e ammortizzatori, quindi anche le forze di attrito iniziali dei pneumatici sono nulle. Si è dovuto quindi ricorrere ad uno stratagemma: si è fatta precedere la simulazione vera e propria da una corsa di taxing di 4 s imponendo con dei “motions” la stessa velocità dell’aereo e le stesse velocità angolari dei pneumatici del simulatore Simulink. In questo modo l’aereo al termine di questo periodo trova una condizione di equilibrio necessariamente molto vicina a quella determinata dal sistema di inizializzazione del codice ABS. Al termine di questa prima fase, in cui si è usato un passo di integrazione piuttosto ampio per ridurre i tempi e la dimensione dell’output finale, inizia la simulazione vera e propria, con durata e passo di integrazione uguali alla simulazione in Simulink.
5.2.2 Inputs
I dati di input sono gli stessi del test di frenata già condotto in occasione del capitolo 3 e riportati nelle tabelle da Tab. 3.1 a Tab. 3.4. Si veda anche l’appendice A-1 dove sono disposti per intero i files di input del simulatore ABS.
Di seguito si riportano i valori principali.
NOME VALORE
Velocità aereo [m/s] 20
ω ruote anteriori [rad/s] 88.889 ω ruote posteriori [rad/s] 47.103 Angolo di incidenza [rad] 0 Angolo di rollio [rad] 0 Angolo di imbardata [rad] 0
Tab. 5.1 Condizioni iniziali
Settaggi simulazione Simulink Settaggi simulazione ADAMS
NOME VALORE NOME VALORE
Tempo simulazione [s] 0.6 Tempo corsa di equilibrio [s] 4.0 Passo di integrazione [s] 0.0001 Passo di integrazione equil. [s] 0.01
Tempo simulazione [s] 0.6 Passo di integrazione [s] 0.0001
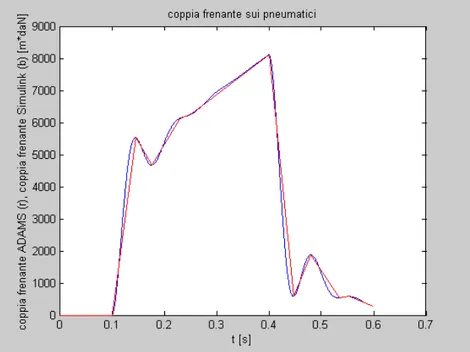
Per quanto riguarda il comando di frenata, nel simulatore Simulink viene definito nei dati di input un gradino di pressione sulla pedaliera attuato dal pilota. Questo comando viene trasformato prima in pressione sul circuito idraulico dal sottosistema 5, “trasduttore della pedaliera”, poi in pressione sui freni dal sottosistema 7 “servovalvola”, infine in momento frenante sul pneumatico dal sottosistema 8, “freno”. Nel modello ADAMS si è preferito inserire direttamente il comando di momento frenante sulle ruote senza calcolarlo, ma utilizzando lo stesso andamento temporale preso dai dati di output del simulatore Simulink; questo a vantaggio di una maggior semplicità e precisione nel confronto delle dinamiche del velivolo.
In Fig. 5.1 è riportato il grafico del momento frenante attuato dai freni sui due modelli.
5.2.3 Risultati
Si è fatta una scelta dei grafici ritenuti più utili per confrontare le prestazioni dei due programmi.
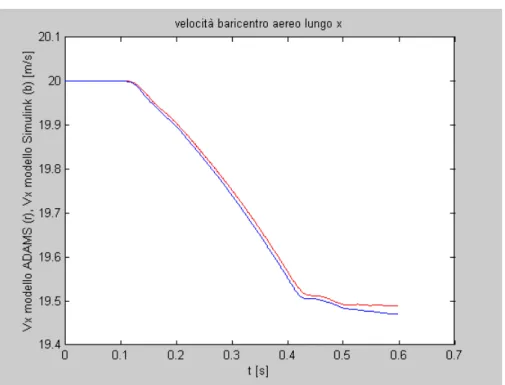
Fig. 5.2 dx baricentro aereo
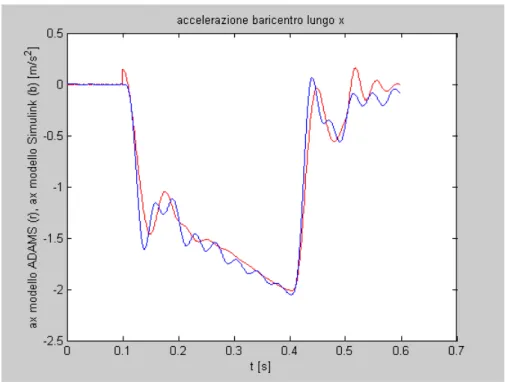
Fig. 5.4 ax baricentro aereo
Per quanto riguarda gli andamenti temporali mostrati dalle precedenti figure, che descrivono la dinamica longitudinale del baricentro dell’aereo, si può rilevare una ottima correlazione tra le curve relative ai due diversi modelli.
Si nota come, a t = 0.1 s venga attuata la frenata, che si protrae per 0.3 s fino a t = 0.4 s; l’aereo inizia a rallentare con un certo piccolo ritardo, e una volta rilasciato il freno si assesta con piccole oscillazioni attorno alla nuova velocità di equilibrio.
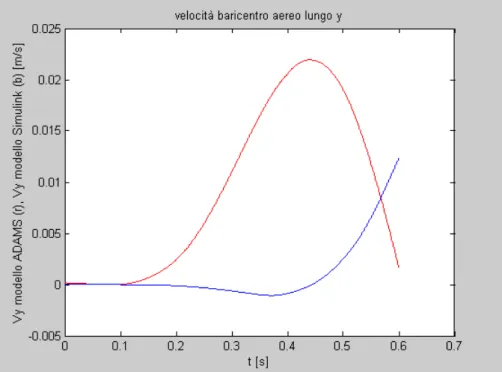
Fig. 5.6 Vy baricentro aereo
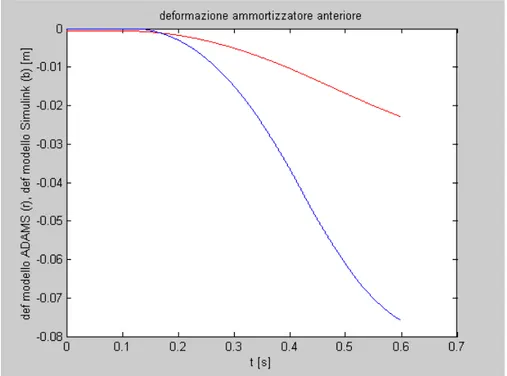
Fig. 5.8 deformazione ammortizzatore del carrello anteriore
Le figure Fig. 5.5 e Fig. 5.6 sono relative alla dinamica verticale del baricentro, mentre le figure Fig. 5.7 e Fig. 5.8 descrivono la deformazione degli ammortizzatori. Si vede come, in seguito alla frenata l’ammortizzatore anteriore subisce un aumento di carico e si schiaccia, mentre quelli posteriori vedono diminuire il loro carico e si allungano leggermente; questo causa un piccolo innalzamento del baricentro la cui posizione longitudinale è molto vicina quella dei carrelli posteriori.
In questo caso però, le figure mostrano una evidente differenza negli andamenti temporali propri dei due diversi modelli. Infatti, sebbene in entrambi i casi ci si possa ricondurre alla stessa dinamica, le ampiezze delle curve e i tempi di reazione sono diversi.
La spiegazione di questo fatto può risiedere nelle seguenti considerazioni: prima di tutto le grandezze in gioco sono molto piccole, quindi sono più sensibili ad eventuali errori.
Inoltre,le caratteristiche di rigidezza e smorzamento di pneumatici e ammortizzatori non sono costanti ma sono delle curve funzione della deformazione degli stessi. Come si evince confrontando quanto detto nel paragrafo 5.2.1 a proposito dell’inizializzazione del modello
ADAMS, con il metodo di inizializzazione del simulatore Simulink (§ 2.2), i metodi per mettere il modello in una condizione di equilibrio sono sostanzialmente molto diversi. In particolare nel simulatore Simulink si parte dal presupposto di avere nota, e fissa, l’altezza da terra del baricentro e l’angolo di assetto, per poi calcolare, una volta impostata la velocità, le forze aerodinamiche e le forze di equilibrio a terra e i valori effettivi delle deformazioni di pneumatici e ammortizzatori. Invece per il modello ADAMS si fa partire l’aereo in una configurazione che è quella definita dai dati di ABS Simulink, ma che non rappresenta per ADAMS la configurazione di equilibrio perché il modello non è ancora appoggiato al suolo; per trovare l’equilibrio si fa una corsa di taxing di qualche secondo, al termine della quale il modello si è stabilizzato in una configurazione sicuramente vicinissima a quella del modello Simulink, ma che necessariamente ha delle piccole differenze. Il problema non riguarda le componenti orizzontali delle grandezze, poiché si è imposto con dei “Motions” la stessa velocità dell’aereo e la stessa velocità angolare dei pneumatici del modello Simulink, (quindi sono uguali anche lo scorrimento e le forze di attrito una volta distribuito il peso sui pneumatici); diverso è il discorso per le componenti
valori di deformazione degli ammortizzatori e dei pneumatici diversi da quelli del modello Simulink, e questo significa poi iniziare la simulazione vera e propria in punti delle curve caratteristiche diversi rispetto a quelli dell’altra simulazione, quindi con rigidezza diversa. Se si aggiunge a questo, il fatto che le grandezze in gioco sono piccole, si può spiegare come mai gli andamenti temporali di queste grandezze siano così lontani nelle due simulazioni.
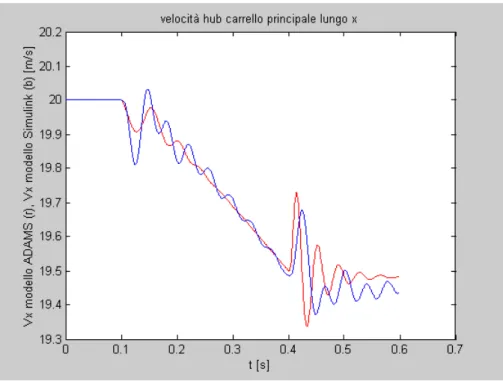
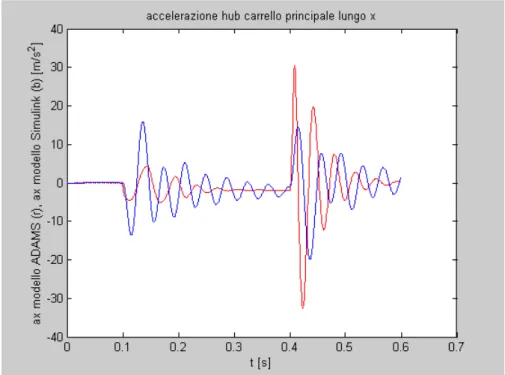
Fig. 5.11 ax mozzo del carrello principale
Fig. 5.12 ax mozzo del carrello anteriore
Le figure da Fig. 5.9 a Fig. 5.12 mostrano la dinamica longitudinale dei mozzi delle ruote. Si può notare una buona correlazione tra le curve, anche se le oscillazioni della velocità del mozzo del carrello principale appaiono più smorzate nel modello ADAMS che nel modello Simulink.
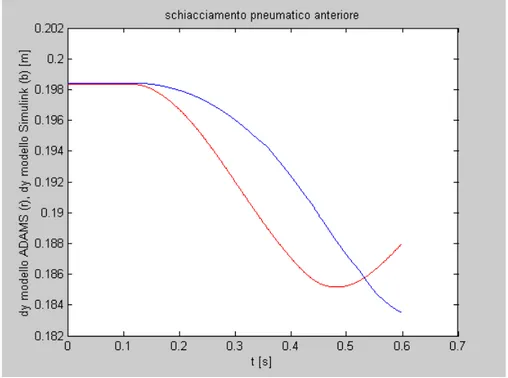
Fig. 5.13 Schiacciamento pneumatici del carrello principale
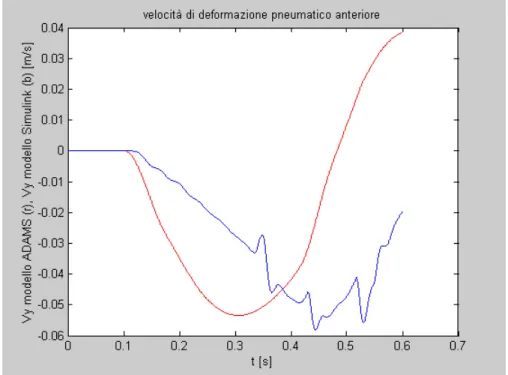
Fig. 5.15 Velocità di deformazione pneumatici del carrello principale
Fig. 5.16 Velocità di deformazione pneumatici del carrello principale
Le figure da Fig. 5.13 a Fig. 5.16 mostrano gli andamenti temporali della deformazione e della velocità di deformazione dei pneumatici. Si può osservare come in seguito all’inizio della frenata i pneumatici anteriori si caricano ulteriormente e si schiacciano, mentre quelli posteriori si scaricano e diminuiscono il loro schiacciamento. In questo caso si riscontra una correlazione tra le curve migliore rispetto a quella riscontrata nella dinamica verticale del baricentro e degli ammortizzatori, perché evidentemente la condizione di equilibrio dei pneumatici trovata prima di far partire la simulazione in ADAMS è molto vicina a quella del simulatore Simulink. Si nota infatti come le ampiezze di deformazioni e velocità siano
Fig. 5.17 Velocità angolare ruote del carrello principale
Fig. 5.19 Sx pneumatici del carrello principale
Fig. 5.20 sx pneumatici del carrello anteriore
I diagrammi da Fig. 5.17 a Fig. 5.20 illustrano la dinamica di spin dei pneumatici.
Si nota in tutte le curve una ottima corrispondenza tra gli andamenti temporali delle grandezze relative ai due differenti modelli. L’unico grafico che presenta scostamenti rilevanti tra le due curve è quello dello scorrimento del pneumatico anteriore, ma anche in questo le grandezze in gioco sono molto piccole.
5.3 CONFRONTO TRA IL MODELLO SIMULINK E QUELLO ADAMS 5.3.1 Commento sui risultati
Si è già discusso in dettaglio nel precedente paragrafo sulla corrispondenza delle curve relative ai due diversi simulatori nei singoli diagrammi. Si è visto che, in generale, i risultati ottenuti con il modello ADAMS si sono rivelati soddisfacenti, e che, laddove le curve mostravano minor correlazione, si è potuto spiegare la cosa con la difficoltà incontrata a far iniziare le simulazioni esattamente nelle stesse condizioni.
Altre piccole differenze di ampiezze di oscillazione e frequenze possono essere imputabili per esempio al diverso solutore che usano ADAMS e Simulink, ma non sembra che ci siano reali differenze di accuratezza dei risultati.
5.3.2 Tempi di calcolo
Si riportano nella seguente tabella Tab 5.3 i tempi di calcolo richiesti per le due simulazioni.
In questo caso il tempo relativo alla simulazione in ADAMS è stato preso facendo girare la simulazione senza l’aggiornamento grafico, ed è comprensivo dei 400 step (su 6000) della corsa di equilibrio di cui si è già detto. Inoltre si ricorda che si è usata la versione di ABS aggiornata con le functions in C++, che (cfr. § 3.4) è risultata quasi sedici volte più veloce di quella originale con le functions in Matlab.
SIMULAZIONE DI FRENATA Tempo di
simulazione Passo diintegrazione Tempo di calcoloSimulink con function Matlab Tempo di calcolo Simulink con function C++ Tempo di calcolo ADAMS
0.6 sec. 0.0001 sec. 701 sec. 44 sec. 154 sec.
Tab. 5.3 tempi di calcolo
In questo test, i tempi di calcolo del codice Simulink aggiornato con le functions in C++ si sono rivelati inferiori a quelli di ADAMS, circa un quarto. Questi sono comunque sensibilmente migliori di quelli del codice Simulink originale con le functions in Matlab.
5.3.3 Tempi di programmazione
Il simulatore ABS è stato il frutto del lavoro di un team di due persone interno al dipartimento di Ingegneria Aerospaziale. Tutto l’iter di programmazione, dalla stesura delle specifiche alla consegna della prima versione finita durò circa un anno.
I tempi di programmazione dello stesso modello in ADAMS sono quantificabili in circa tre mesi, ed il lavoro è stato condotto da un’unica persona, anche se in effetti si parla di un modello privo di tutte le dinamiche di trasduttori e attuatori presenti invece nel modello Simulink.
Quello che rende molto più veloce la costruzione di un modello di simulazione di dinamica in ADAMS è che, essendo ADAMS un ambiente esplicitamente dedicato alla simulazione, non è necessaria la programmazione del modello matematico della dinamica, perché questo è già implementato nei solutori.
Allo stesso modo è possibile far eseguire le stesse simulazioni nel modello in ADAMS semplicemente andando ad aggiungere o modificare le appropriate “forces” o “motions”. Il simulatore in Simulink, però non va al di là delle manovre per cui è stato programmato, e riutilizzare il modello per altre manovre (ad esempio un touch down con fase aerea) comporterebbe un grosso lavoro di modifica al modello.
In ADAMS invece per adattare il modello alla nuova simulazione è sufficiente imporre le giuste condizioni iniziali e al contorno.
5.3.5 Grafica
E’ importante sottolineare che una simulazione, prima di tutto, serve per capire come si evolve la dinamica di un sistema. Entrambi i modelli offrono la possibilità di consultare a fine simulazione i diagrammi temporali di tutte le grandezze degne di nota.
ADAMS consente anche di poter vedere l’animazione del modello tridimensionale, ed è indiscutibile che questo permette una più semplice e immediata comprensione della dinamica del sistema, e facilita molto la comprensione di eventuali errori di programmazione.
5.4 CONFRONTO TRA GLI AMBIENTI ADAMS E MATLAB-SIMULINK
Fino ad ora si è fatto un confronto diretto tra il simulatore in Simulink ABS3.0 con il medesimo modello sviluppato in ADAMS. Si vuole, adesso, allargare il confronto ai due diversi ambienti di programmazione, Matlab-Simulink e ADAMS, sempre riferendosi al loro utilizzo nel campo delle simulazioni. Infatti, in realtà, i due ambienti avrebbero ben poco in comune, essendo Matlab un vero e proprio ambiente di programmazione versato agli usi più vari, mentre ADAMS è un software esclusivamente dedicato alle simulazioni. Si espongono di seguito alcune considerazioni generali.
- Approccio alla costruzione di modelli di simulazione: Simulink Æ tradurre equazioni differenziali in diagrammi a blocchi. Si devono comunque scrivere le equazioni.
ADAMS Æ costruzione topologica del modello, vincoli, forze. E’ trasparente la scrittura delle equazioni differenziali del moto, che vengono risolte automaticamente dal codice.
- Accuratezza dei risultati: E’ possibile implementare in entrambi gli ambienti modelli identici in ogni caratteristica fisica, e usare lo stesso passo di integrazione. Se nei test presenti in questo lavoro si sono verificate delle differenze tra i risultati ottenuti con i due diversi simulatori, è a causa delle piccole differenze tra i modelli in esame, e non della precisione dei solutori.
- Tempi di calcolo: Sfruttando la possibilità di usare functions scritte in linguaggi di programmazione più efficienti del Matlab, come ad esempio, nel caso in esame, il C++, il Simulink ha offerto prestazioni migliori. Inoltre se non si fosse disattivata l’opzione di aggiornamento dell’animazione del modello il divario tra i tempi delle due simulazioni sarebbe aumentato notevolmente. Altri tests eseguiti con lo stesso modello, ma non riportati nel presente lavoro hanno confermato la stessa tendenza. Invece tests fatti con modelli più semplici in fase di studio hanno evidenziato come questa differenza tenda ad annullarsi, ed addirittura a invertirsi con modelli elementari.
- Interfaccia: Matlab non ha una vera e propria interfaccia grafica: l’Editor attraverso cui si scrivono i programmi è un elaboratore di testi e possiede solo alcune semplici funzioni di debugging. Il tool Simulink invece offre la possibilità di costruire complessi diagrammi a blocchi scegliendo questi da appositi menù rendendo più semplice e immediata la programmazione soprattutto dove vi sono controlli retroattivi. Essendo un software esclusivamente dedicato alle simulazioni multicorpo, ADAMS fa dell’interfaccia utente uno dei suoi punti di forza: è possibile compiere tutte le operazioni di costruzione del modello scegliendo le giuste icone in appositi menù, mentre su una finestra di dialogo vengono descritte le operazioni da compiere per procedere. Inoltre, la possibilità di vedere la realizzazione tridimensionale del modello contribuisce a renderne la costruzione più semplice e intuitiva. Inoltre, accedendo ad una particolare finestra di ADAMS, il “post processor” è possibile visualizzare e gestire con facilità ogni tipo di output di una simulazione.
- Grafica: Il comparto grafico di ADAMS offre dei notevoli vantaggi rispetto a Matlab-Simulink: avere un riferimento visivo, semplifica la costruzione del modello, e poter vedere l’animazione della simulazione rende più agevole la comprensione della dinamica e di eventuali errori di programmazione. Verò è anche, però, cheattraverso
- Versatilità modello di simulazione: In Matlab ogni modifica al tipo di simulazione va opportunamente programmata e questo può comportare a volte cambiamenti anche pesanti a tutto il codice. In ADAMS, di solito, è sufficiente modificare le condizioni iniziali dell’aereo e le espressioni di alcune “forces” o “motions” per adattarle alla nuova simulazione. Bisogna anche dire, però che essendo Matlab un vero e proprio linguaggio di programmazione, con le appropriate conoscenze, è possibile creare codici che simulano veramente qualsiasi cosa, mentre in ADAMS, alcuni aspetti sono particolarmente difficili da gestire. Un esempio può essere la maggior facilità con cui sono trattati in Simulink i controlli automatici, rispetto ad ADAMS, dove per poter implementare dei veri e propri controlli retroattivi bisogna ricorrere ad interfacciarsi con un programma (per esempio Simulink stesso)
Nel seguente prospetto si riassumono i punti di forza dei due ambienti di programmazione.
PUNTI DI FORZA ADAMS PUNTI DI FORZA SIMULINK
Interfaccia Versatilità
Grafica Facilità implementazione controlli
automatici Semplicità di programmazione