Vite – madrevite
B.1 Definizioni
Il sistema vite-madrevite è uno dei metodi per realizzare una trasmissione fra un albero rotante e un asse traslante.
L'accoppiamento fra i due corpi avviene lungo una superficie cilindrica su cui è ricavata una filettatura. Gli elementi geometrici fondamentali della coppia sono l'angolo dell'elica del filetto , il raggio medio r e il passo p del filetto.
Si supponga, come illustrato in Fig. B.1, di vincolare a uno stesso telaio fisso il corpo interno, la vite, attraverso una cerniera, in modo da consentirne la rotazione intorno al proprio asse, e il corpo esterno, la madrevite, tramite una coppia prismatica, in modo da consentirne la traslazione parallela al proprio asse. È evidente, in tale situazione, come ad ogni giro della vite si ha una traslazione della madrevite pari a un passo lungo l'asse della coppia.
Il moto relativo possibile fra i due corpi è la somma di un moto di rotazione e di uno di traslazione, reciprocamente dipendenti, per cui vi è un solo grado di libertà.
Indicando con t il tempo in cui la vite compie un giro completo e la madrevite trasla di un passo p, si avrà:
v= p
t (B.1)
e
=٢
t (B.2)
si ricava, quindi, la relazione biunivoca tra il moto rotatorio della vite e quello traslatorio della madrevite:
v= p
٢⋅ (B.3)
Questo tipo di sistemi, vite-madrevite, si utilizza usualmente per consentire avanzamenti graduali e precisi di sistemi di posizionamento, o per sviluppare forze elevate utilizzando motori di potenza ridotta, in sistemi di sollevamento.
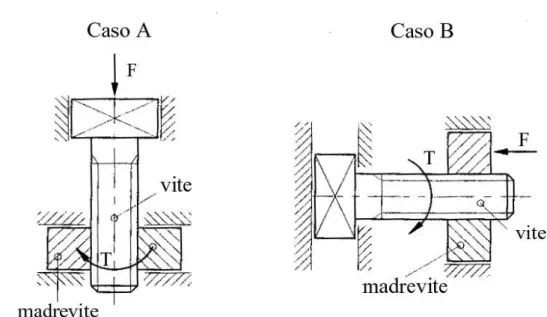
Per l'utilizzo di una coppia vite-madrevite, come sistema di trasmissione, si richiede vincolare in maniera opportuna i due elementi, in Fig. B.2 sono riportati due schemi tipicamente adottati per tale sistema.
Fig. B.2 – Schemi tipici per vincolare il sistema vite-madrevite.
Nel caso A di figura, la vite è vincolata a telaio fisso con una guida prismatica, perciò questa può traslare lungo il proprio asse, mentre la madrevite è vincolata per mezzo di una cerniera allo stesso telaio, per cui è in grado solo di ruotare. In questa configurazione, applicando alla madrevite una coppia T , è possibile comandare la traslazione della vite e contrastare la forza F.
Nel caso B di figura, si sono scambiati i vincoli, quindi, applicando la coppia T alla vite, è possibile far traslare la madrevite contrastando la forza F applicata a essa.
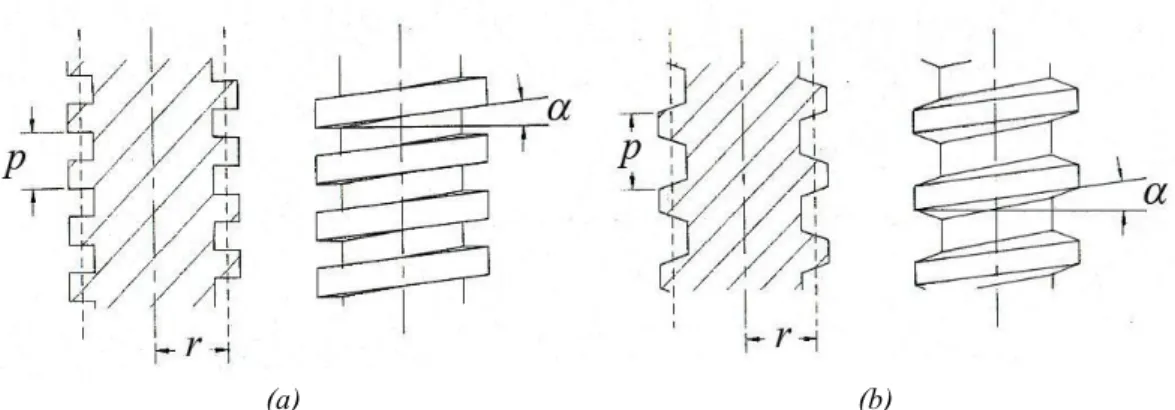
Generalmente si distinguono due tipologie di vite, discriminate per il profilo del filetto. Il profilo dunque, può essere rettangolare e trapezio.
La vite a profilo rettangolare si caratterizza per la presenza, in sezione meridiana, di una serie di risalti rettangolari, come si evince da Fig. B.3a.
La vite a profilo trapezio invece, nella stessa sezione, presenta una serie di risalti a profilo trapezoidale (Fig B.3b).
Per mezzo della vite rettangolare è possibile ottenere un accoppiamento più preciso con un miglior rendimento.
(a) (b)
Fig. B.3 – Tipologie di vite con: (a) profilo rettangolare, (b) profilo trapezio.
Si definisce passo della vite la distanza p misurata in un piano meridiano che intercorre fra due punti successivi che appartengono allo stesso filetto. Nel caso di vite con un solo filetto, il passo coincide con la distanza che intercorre fra due risalti consecutivi, mentre nel caso di vite con più filetti, detta anche vite a
più principi, il passo è un multiplo della distanza fra due risalti successivi [11].
B.2 Principio di funzionamento e rendimento
La vite e la madrevite, durante la trasmissione del moto, si scambiano forze distribuite su tutta la lunghezza dei filetti.
L'analisi delle forze scambiate, può essere effettuata considerando non i filetti, ma lo sviluppo sul piano della loro elica media, come se si trattasse del lato obliquo di due cunei, con l'ipotesi supplementare che le forze siano concentrate in un unico punto della superficie di contatto dei cunei.
In questa maniera, ad esempio per un sistema costituito da una vite in grado di traslare e da una madrevite in grado di ruotare, il sistema di cunei equivalenti si riduce a quello esposto in Fig. B.4. Il cuneo corrispondente all'elemento rotante, la madrevite in questo caso, traslerà con velocità v corrispondente alla velocità periferica del filetto pari a:
v=⋅r (B.4)
e sarà sottoposto non a una coppia T , ma alla corrispondente forza periferica F :
F =T
r (B.5)
Nel caso di filetti a sezione rettangolare, i cunei equivalenti si riducono a un sistema bidimensionale, essendo tutte le forze scambiate sullo stesso piano. Se i filetti fossero a sezione trapezia, invece sarebbe necessario considerare anche una terza componente delle forze scambiate.
Nel seguito, per semplicità, si considerano solo filetti a sezione rettangolare, e si considera solo l'attrito tra i filetti, trascurando l'attrito fra gli elementi e i rispettivi vincoli.
Si supponga di voler sollevare un carico FA a velocità costante con
meccanismo vite-madrevite. Il carico FA grava sull'elemento traslante, la vite nel
caso a esempio, mentre si dovrà applicare una coppia T all'elemento rotante. Un sistema equivalente di cunei è presentato in Fig. B.5, in cui il corpo 1, schematizzante la vite, sopporta il carico FA , mentre il corpo 2, che rappresenta la
madrevite, è soggetto alla forza F =T /r .
L'angolo di inclinazione dei cunei , corrisponde all'angolo di inclinazione media dei filetti, in figura è indicata, inoltre, la forza R2 , inclinata
rispetto alla normale dell'angolo di attrito , trasmessa dal cuneo 2 al cuneo 1. Se si indica con R3 ed R1 le reazioni esercitate dai vincoli esterni sulla vite e
sulla madrevite, per effetto dell'assenza di attrito su tali vincoli, le reazioni sono perpendicolari alla superficie di contatto. La forza R2 , invece per effetto
dell'attrito fra i due cunei, risulta inclinata, rispetto alla verticale, di un angolo . Imponendo l'equilibrio verticale del cuneo 1 e orizzontale del cuneo 2, si ricava:
FA=R2⋅cos (B.6) e
F =R2⋅sin (B.7)
Se si divide membro a membro le (B.6) e (B.7) si ricava:
F
FA=tan (B.8)
T =F⋅r=FA⋅r⋅tan (B.9)
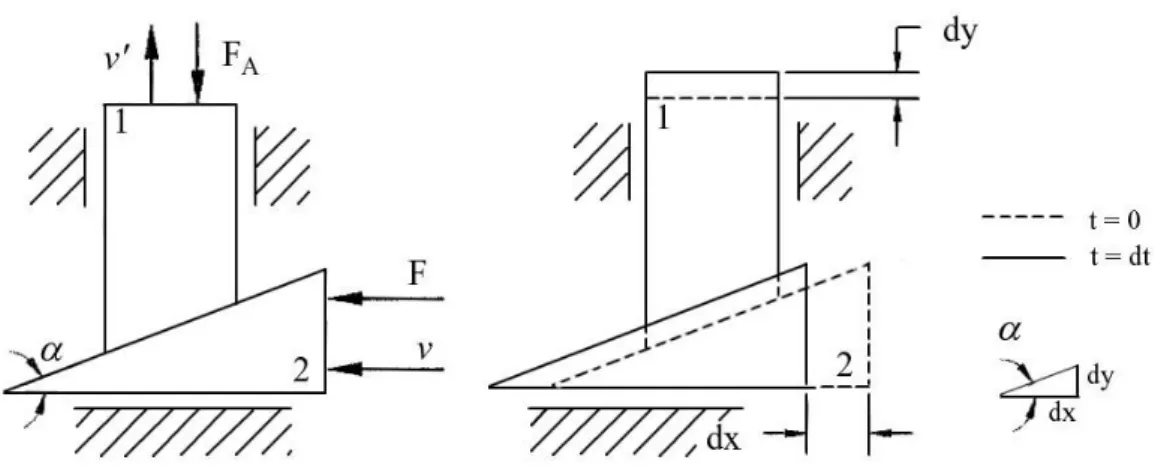
Una trasmissione effettuata con un sistema vite-madrevite avrà un rendimento di entità dipendente dall'attrito sui filetti e dall'attrito sui vincoli. Con riferimento alla Fig. B.6, si supponga di applicare una coppia T alla madrevite o, in maniera equivalente, una forza F al cuneo 2, per contrastare il carico FA che
agisce sul cuneo 1, la vite. Nell'istante sotto esame, il carico viene spostato alla velocità v', mentre la madrevite ruota alla velocità . La velocità v del cuneo 2, equivalente alla madrevite, e la forza su di esso possono essere determinate rispettivamente dalle espressioni (B.4) e (B.5).
Fig. B.6 – Spostamenti dx e dy per il calcolo del rendimento.
Avendo supposto la presenza di attrito solo fra i filetti e non sui vincoli, per il rendimento della trasmissione si ottiene:
=Pu
Pe
=FA⋅v '
T⋅ (B.10)
ma in base a quanto espresso in (B.9):
= FA⋅v ' FA⋅v⋅tan = 1 tan⋅ v ' v (B.11)
Quindi per il calcolo di occorre conoscere la relazione fra v' e v. Osservando la Fig. B.6 può essere notato che se in un tempo dt il cuneo 2 si sposta di dx, nello stesso lasso di tempo il cuneo 1 si solleva di dy, allora:
dy=dx⋅tan (B.12) e dy dt=v '= dx dt⋅tan =v⋅tan (B.13)
per cui, in definitiva, si avrà per il rendimento :
= tan
tan (B.14)
Nel caso di utilizzo del meccanismo in senso inverso, cioè con forza motrice assiale F applicata sulla vite per vincere una coppia resistente T sulla madrevite, con analogo procedimento, si ottiene:
' =tan −
tan (B.15)
Risultato significativo solo se il moto è possibile, cioè se [11].
B.3 Reversibilità del moto
Si consideri il sistema di sollevamento esposto nel precedente paragrafo (Fig. B.5), senza attrito sui vincoli.
Il sistema è detto reversibile se, tolta la coppia T, la forza assiale FA è in
madrevite. In caso contrario il moto è detto irreversibile.
Gli elementi discriminanti per l'uno o l'altro caso, sono esclusivamente la geometria della vite e le forze di attrito.
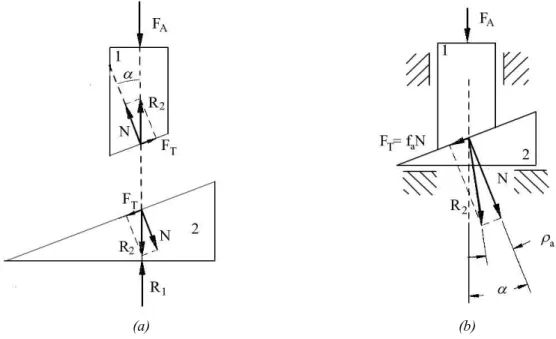
(a) (b)
Fig. B.7 – Abbassamento del carico nel caso di moto reversibile.
Si supponga che i due cunei si trovino in condizione di aderenza, cioè fra i due non esista moto relativo, allora la forza tangenziale FT e la forza normale N
scambiate fra i due cunei, saranno legate dalla relazione:
FT≤fa⋅N (B.16)
Come si evince dai diagrammi di corpo libero dei due cunei, riportati in Fig. B.7a, al cuneo 2 non è applicata la forza orizzontale corrispondente alla coppia sulla madrevite. In tale situazione, in assenza di vincoli, è evidente come le forze esercitate sul cuneo 2, e conseguentemente sul cuneo 1, non possano avere componenti orizzontali, ma solo verticali, per cui la risultante R2 sarà inclinata,
FT=N⋅tan (B.17)
Dal confronto dell'espressione (B.16) con la (B.17) si vede che affinché tale situazione sia possibile, deve valere:
fa≥tan (B.18)
e quindi:
a≥ (B.19)
dove con a si è indicato l'angolo di aderenza, mentre con fa=tan a si
è indicato il coefficiente di aderenza, detto anche coefficiente di attrito statico. La (B.19) costituisce la condizione di irreversibilità del moto.
Il moto sarà dunque reversibile se l'angolo di aderenza sarà minore dell'angolo di inclinazione dell'elica, cioè:
a (B.20)
Questo caso è illustrato in Fig. B.7b, in cui è riportata anche la forza applicata dal cuneo 1 al cuneo 2, si vede come la forza risultante R2 tende a
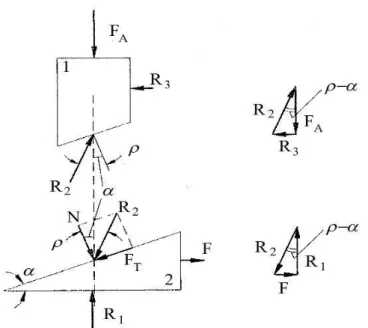
spostare verso destra il cuneo 2 e a far abbassare, di conseguenza, il cuneo 1. Si supponga di voler controllare la discesa di un carico FA a velocità
costante, con un sistema vite-madrevite irreversibile, quindi , con al solito l'ipotesi di presenza di attrito solo tra i filetti.
In tale condizione è possibile redigere i diagrammi del corpo libero riportati in Fig. B.8.
Fig. B.8 – Abbassamento del carico nel caso di moto irreversibile.
Si può notare il verso delle forze tangenziali FT , sempre in opposizione al
moto del corpo a cui sono applicate. Dall'equilibrio verticale del cuneo 1, si ottiene:
FA=R2⋅cos − (B.21)
mentre dall'equilibrio orizzontale del cuneo 2 si trova:
F =R2⋅sin − (B.22)
Dividendo membro a membro le due equazioni (B.21) e (B.22) in definitiva si ha:
F =FA⋅tan − (B.23)
Da questo risultato si evince che, per determinare la discesa del carico, è necessario tirare il cuneo 2 [11].