CAPITOLO 4
CARATTERISTICHE TECNICHE DEI TRACCIATI E
PRESCRIZIONI NORMATIVE
4.1 CLASSIFICAZIONE DELLE STRADE
Conformemente a quanto previsto all’art. 2 del “Nuovo Codice della Strada” (Decreto Legislativo 285/92 e suoi aggiornamenti successivi), le strade vengono classificate, con riguardo alle loro caratteristiche costruttive, tecniche e funzionali, nei seguenti tipi:
• A – Autostrade (urbane ed extraurbane) • B – Strade extraurbane principali
• C – Strade extraurbane secondarie • D – Strade urbane di scorrimento • E – Strade urbane di quartiere • F – Strade locali
Ad ogni categoria è associata una propria geometria, un proprio intervallo di velocità di progetto e un livello di servizio minimo da soddisfare. Per i tracciati proposti in questa tesi si è adottata la tipologia C1 come indicato dal Piano Regionale dei Trasporti recentemente adottato dalla Regione Autonoma della Sardegna. La sezione trasversale della tipologia C1 è riportata in Figura 1, l’intervallo di velocità è 60 – 100 km/h e il livello di servizio minimo da garantire viene indicato con la lettera C cui corrisponde una condizione di deflusso tale che, per mantenere le velocità desiderata, occorrono cambi di corsia o sorpassi piuttosto frequenti i quali richiedono notevole attenzione da parte degli utenti (definizione del Highway Capacity Manual). La verifica del livello di servizio della infrastruttura esula dagli scopi del presente studio, ma
si può ipotizzare con una certa sicurezza il rispetto di tale vincolo in virtù dei dati di traffico, seppur poco precisi, relativi alle strade interessate e più in generale all’intera provincia, che mostrano come i volumi di traffico della rete siano di modesta entità. Difatti la realizzazione di nuove strade in queste aree non prende le mosse dalla necessità di soddisfare una domanda crescente, bensì dall’esigenza di garantire accessibilità e tempi di trasporto congrui alla media nazionale, alle popolazioni residenti e ai flussi provenienti dal resto della regione.
4.2 ORGANIZZAZIONE DELLA SEDE SRADALE IN SEDE ARTIFICIALE
Vista la presenza di diverse opere d’arte equamente distribuite nelle varie soluzioni progettuali sembra opportuno richiamare alcuni cenni normativi circa la sistemazione della sede stradale in presenza di opere di scavalcamento, sottopassi e gallerie.
Opere di scavalcamento e sottopassi
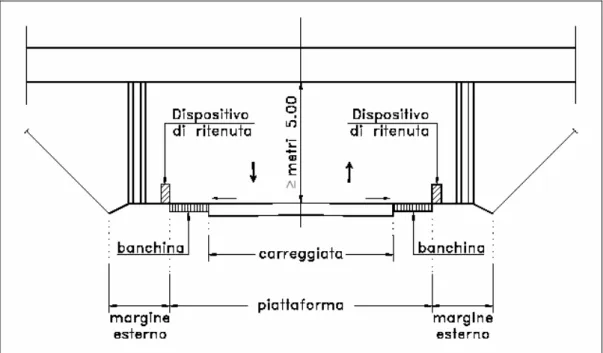
Sulle opere di scavalcamento (ponti, viadotti, sovrappassi) devono essere mantenute invariate le dimensioni degli elementi componenti la piattaforma stradale, relative al tipo di strada di cui fanno parte dette opere. A margine della piattaforma delle strade extraurbane e delle autostrade urbane devono essere predisposti dispositivi di ritenuta e/o parapetti di altezza non inferiore a m. 1,00 (Figura 2), (D.M. 4/5/90 “Aggiornamento delle norme tecniche per la progettazione, la esecuzione e il collaudo dei ponti stradali). Inoltre deve essere valutata l’opportunità di predisporre una adeguata protezione del traffico sottostante, sia esso stradale o ferroviario, con l’adozione di reti di conveniente altezza.
Nella progettazione di un’opera di sovra/sottopasso,la piattaforma della strada sottostante deve mantenere immutate le proprie dimensioni e composizione. Le strutture di sostegno dell’opera di scavalcamento dovranno essere previste al di fuori della piattaforma e comunque a distanza non inferiore a quella compatibile con il corretto funzionamento dei dispositivi di ritenuta. Le strutture orizzontali devono dar luogo ad una altezza libera, misurata sulla verticale a partire da qualsiasi punto della carreggiata stradale sottostante, non inferiore a 5,00 metri come illustrato in Figura 3. Nei casi previsti al par. 2.2 del D.M. 4.5.90 si potrà derogare dalla misura suddetta, adottando contemporaneamente opportuni dispositivi segnaletici di sicurezza (ad es. controsagome), posti a conveniente distanza dall’opera. Per tutti i tipi di strada, qualora l’opera in sottopasso abbia una lunghezza superiore ai metri 20, la piattaforma e gli elementi marginali saranno previsti in analogia al caso delle gallerie.
Gallerie
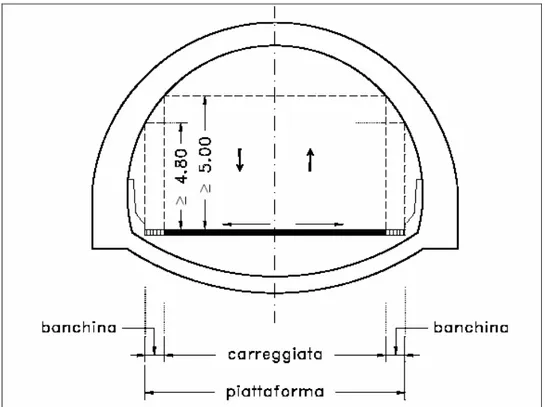
Per le strade a carreggiate indipendenti o separate da spartitraffico (tipo A, B e D) devono prevedersi gallerie a doppio foro. Per le strade a carreggiata unica bidirezionale (tipo C e F in ambito extraurbano), quali quelle adottate in questo studio, l’organizzazione della piattaforma è riportata in Figura 4.
Figura 4: Sistemazione della sede stradale in galleria
In tutti i casi l’altezza libera nella galleria, misurata sulla verticale a partire da qualsiasi punto della piattaforma, non deve essere inferiore a metri 4.80. Nel caso di controsoffitto o di intradosso piano (galleria in artificiale) o di presenza di apparecchi sospesi, il franco libero in corrispondenza alla carreggiata non deve essere inferiore a metri 5,00. Ciò, salvo il caso di strade a traffico selezionato con altezza di sagoma limite ridotta. Lo schema di sezione illustrato i figura individua lo spazio minimo necessario in corrispondenza
della piattaforma; il progettista dovrà adeguare la sagoma in relazione alle esigenze connesse alla dislocazione di elementi marginali necessari (segnaletica stradale, marciapiedi di servizio protetti, canalizzazioni, ecc.). Le dimensioni delle banchine laterali si intendono come valori minimi, eventualmente da incrementare qualora le verifiche di visibilità di cui al paragrafo 4.3 ne dimostrino la necessità. Le superfici aggiuntive rispetto ai valori minimi devono essere trattate per scoraggiarne l’utilizzo da parte degli utenti.
La galleria di lunghezza massima fra quelle previste non supera i 350 m per cui non sono previste, né in essa, né nelle altre, piazzole di sosta o opere di ventilazione. Inoltre la quasi totalità delle gallerie ipotizzate presenta una pendenza longitudinale massima del 3,5%, eccezion fatta esclusivamente per un caso lungo il Tracciato 5 in cui la galleria si ha su una livelletta al 6%, ma la lunghezza di soli 150 m consente di accettarne la presenza.
4.3 DISTANZE DI VISIBILITA’
L’esistenza di opportune visuali libere costituisce primaria ed inderogabile condizione di sicurezza della circolazione. Per distanza di visuale libera si intende la lunghezza del tratto di strada che il conducente riesce a vedere davanti a sé senza considerare l’influenza del traffico, delle condizioni atmosferiche e di illuminazione della strada.
Lungo il tracciato stradale la distanza di visuale libera deve essere confrontata, in fase di progettazione ed a seconda dei casi successivamente precisati, con le seguenti distanze:
• Distanza di visibilità per l'arresto, che è pari allo spazio minimo necessario perché un conducente possa arrestare il veicolo in condizione di sicurezza davanti ad un ostacolo imprevisto.
• Distanza di visibilità per il sorpasso, che è pari alla lunghezza del tratto di strada occorrente per compiere una manovra di completo sorpasso in sicurezza, quando non si possa escludere l’arrivo di un veicolo in senso opposto.
• Distanza di visibilità per la manovra di cambiamento di corsia, che è pari alla lunghezza del tratto di strada occorrente per il passaggio da una corsia a quella ad essa adiacente nella manovra di deviazione in corrispondenza di punti singolari (intersezioni, uscite, ecc.).
Le distanze di visibilità da verificare dipendono dal tipo di strada in progetto e dall’elemento di tracciato considerato. Indipendentemente però dal tipo di strada e dall'ambito (extraurbano o urbano), lungo tutto il tracciato deve essere assicurata la distanza di visibilità per l’arresto in condizioni ordinarie o con tempi di reazione maggiorati. Nelle strade extraurbane a unica carreggiata con doppio senso di marcia, la distanza di visibilità per il sorpasso deve essere garantita per una conveniente percentuale di tracciato, in relazione al flusso di traffico smaltibile con il livello di servizio assegnato, in
misura comunque non inferiore al 20%. Ai fini delle verifiche delle visuali libere, la posizione del conducente deve essere sempre considerata al centro della corsia da lui impegnata, con l'altezza del suo occhio a m. 1,10 dal piano viabile. Nella valutazione della distanza di visibilità per l'arresto, l'ostacolo va collocato a m. 0,10 dal piano viabile e sempre lungo l'asse della corsia del conducente. Nel caso della distanza di visibilità per il sorpasso, l'ostacolo mobile va collocato nella corsia opposta, con altezza pari a m. 1,10. Nel caso della manovra di cambiamento di corsia, deve venir verificata la possibilità di vedere il limite più lontano della corsia adiacente a quella impegnata dal conducente.
Lungo i Tracciati proposti è sempre garantita la distanza di visibilità per l’arresto, per quel che concerne invece la distanza di visibilità per il sorpasso bisogna distinguere il discorso sui singoli Tracciati da quello relativo ai Percorsi. Se considerati singolarmente, solo i Tracciati 1, 4 e 6 soddisfano abbondantemente la verifica, il Tracciato 3 è al limite e sono leggermente sotto il 20% i Tracciati 2 e 5. Viceversa se si esegue il calcolo riferendosi ai Percorsi completi la verifica è pienamente soddisfatta in tutti e tre i casi A, B e C con le percentuali del 27%, 26% e 28% rispettivamente.
Infine non è stata compiuta alcuna verifica della distanza di visibilità per il cambiamento di corsia poiché lo studio va compiuto a scala inferiore rispetto a quella utilizzata, inoltre le intersezioni sono gestite per lo più con soluzioni a rotatoria per le quali, come noto, non vi è scambio di corsia.
Distanza di visibilità per l’arresto
Viene valutata con la seguente espressione:
( )
( )
( )
1 0 0 1 2 2 1 01
3.6
3.6
100
V A VV
V
D
D
D
dV
Ra V
i
g
f V
r V
m
τ
=
+
=
× −
⎡
⎤
×
⎢
±
⎥
+
+
⎣
⎦
∫
Dove :D1 = spazio percorso nel tempo τ [m] D2 = spazio di frenatura [m]
V0 = velocità del veicolo all’inizio della frenatura [km/h] V1 = velocità finale del veicolo, in caso di arresto 0 [km/h] i = pendenza longitudinale del tracciato [%]
τ = tempo totale di reazione [s] g = accelerazione di gravità [m/s²] Ra = resistenza aerodinamica [N]
m = massa del veicolo [kg]
f1 = quota limite del coefficiente di aderenza
r
0 = resistenza unitaria al rotolamento [N/kg]La resistenza aerodinamica Ra si valuta con la seguente formula:
2 2
1
2 3.6
xRa
=
ρ
C SV
×
Dove : Cx = coefficiente aerodinamico S = superficie resistente [m²]r = massa volumica dell’aria in condizioni standard [kg/m³]
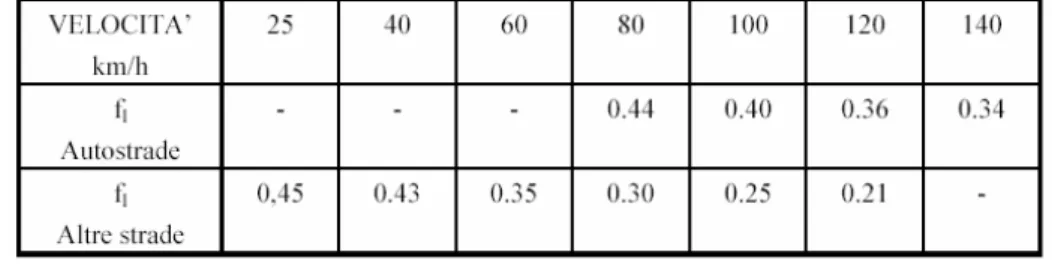
Per fl possono adottarsi le due serie di valori di seguito riportate, una relativa alle autostrade e l'altra valida per tutti gli altri tipi di strade. Tali valori sono compatibili anche con superficie stradale leggermente bagnata (spessore del velo idrico di 0,5 mm).
Tabella 1: quota limite del coefficiente di aderenza
Per le autostrade sono stati adottati valori di fl maggiori in considerazione del fatto che su tale tipo di vie, caratterizzate da standard geometrici elevati nonché da piani viabili di qualità, l'utente tende ad impegnare l'aderenza disponibile in misura maggiore.
Per il tempo complessivo di reazione si assumono valori linearmente decrescenti con la velocità da 2,6 s per 20 km/h, a 1,4 s per 140 km/h., in considerazione della attenzione più concentrata alle alte velocità.
(2.8 0.01 )
V
τ
=
−
con V espresso in km/h.
In situazioni particolari quali incroci o tratti di difficile lettura ed interpretazione (intersezioni complesse, innesti o deviazioni successive ecc.) il tempo di cui sopra va maggiorato di 1 secondo nel caso di strada extraurbana e fino a 3 secondi in ambito urbano.
In Figura 5 vengono riportate le distanze di visibilità per l’arresto calcolate come sopra in funzione di una pendenza costante per strade di categoria B, C, D, E, F. In caso di variabilità di tale pendenza (raccordi verticali), si può assumere per essa il valore medio.
Distanza di visibilità per il sorpasso
In presenza di veicoli marcianti in senso opposto la distanza di visibilità completa per il sorpasso si valuta con la seguente espressione:
20
5.5
Ds
=
× =
v
×
V
dove v (m/s) oppure V(km/h) è la velocità di progetto desunta puntualmente dal diagramma della velocità ed attribuita uguale sia per il veicolo sorpassante che per il veicolo proveniente dal senso opposto.
Distanza di visibilità per la manovra di cambiamento di corsia
Si valuta lo spazio necessario con la seguente espressione nella quale i 9,5 secondi comprendono i tempi necessari per percepire e riconoscere la situazione e per la decisione ed effettuazione della manovra di cambiamento di una sola corsia (4 secondi).
9.5
2.6
Dc
=
× =
v
×
V
dove v (m/s) oppure V(km/h) è la velocità di progetto desunta puntualmente dal diagramma della velocità.
4.4 ANDAMENTO PLANIMETRICO DELL’ASSE
Si definisce andamento planimetrico (o tracciato orizzontale) la proiezione dell’asse della strada su di un piano orizzontale. Il tracciato orizzontale è costituito da elementi a curvatura costante (rettifili ed archi di cerchio), tra i quali vengono sempre inseriti elementi a curvatura variabile (curve di transizione), lungo i quali generalmente si ottiene la graduale modifica della piattaforma stradale, cioè della pendenza trasversale, e, ove necessario, della larghezza.
Rettifili
Per evitare il superamento delle velocità consentite, la monotonia, la difficile valutazione delle distanze e per ridurre l’abbagliamento nella guida notturna, è opportuno che i rettifili abbiano una lunghezza Lr contenuta nel seguente limite:
max
22
Lr
=
×
Vp
dove VpMax è il limite superiore dell’intervallo di velocità di progetto della strada, in km/h.
Nello stesso tempo, le Norme stabiliscono che, affinché un rettifilo sia percepito come tale, deve avere una lunghezza non inferiore ai valori riportati nella Tabella 2 (le velocità ivi indicate sono quelle che si deducono dal diagramma di velocità per il rettifilo considerato).
Curve circolari
Una curva circolare, per essere correttamente percepita, deve avere uno sviluppo corrispondente ad un tempo di percorrenza di almeno 2.5 secondi, valutato con riferimento alla velocità di progetto della curva.
I rapporti tra i raggi R1 e R2 di due curve circolari che, con l’inserimento di un elemento a curvatura variabile, si succedono lungo il tracciato di strade di tipo A, B, C, D e F extraurbane, sono regolati dall’abaco riportato in Figura 6. In particolare, per le strade di tipo A e B, detto rapporto deve collocarsi nella “zona buona”; mentre per le strade degli altri tipi, è utilizzabile pure la “zona accettabile”.
Tra un rettifilo di lunghezza Lr ed il raggio più piccolo fra quelli delle due curve collegate al rettifilo stesso, anche con l’interposizione di una curva a raggio variabile, deve essere rispettata la relazione:
R > Lr per Lr < 300m R ≥ 400m per Lr ≥ 300m
Il raggio minimo delle curve circolari si determina dallo studio dell’equilibrio di un veicolo transitante su una curva circolare; i valori ottenuti sono esposti in Tabella 3.
Tabella 3: Raggio minimo in funzione del tipo di strada e della pendenza trasversale
Per normativa, al raggio minimo è associata la pendenza trasversale massima qmax, che per le strade di tipo B e C è del 7%. In rettilineo o nelle curve a grande raggio, la carreggiata stradale è composta da due falde, aventi pendenza trasversale del 2.5%. Per valutare la velocità e/o la pendenza delle curve circolari con raggi maggiori del minimo, si può utilizzare l’abaco di Figura 7, in base al tipo di strada analizzata procedendo come riportato in seguito. Finché il raggio è minore di quello R* la pendenza trasversale dovrà essere mantenuta costante e pari al valore massimo.
Sperato il valore di R* la pendenza decrescerà in funzione del raggio fino al valore limite del 2,5%, cui corrisponde il raggio R2,5, dopo il quale rimarrà costante e pari sempre al 2,5%.
Figura 7: Relazione fra raggio, velocità e pendenza trasversale
La pendenza trasversale, calcolata come indicato sopra, deve essere estesa all’intera piattaforma, banchine comprese. La determinazione dei valori del raggio e della velocità nelle curve sulla base dell'equilibrio del veicolo non esime però dall'esame della congruità del valore ottenuto mediante la verifica della visuale libera per le manovre previste ai paragrafi precedenti, verifica che potrebbe comportare una maggiorazione di tale valore oppure un incremento dei franchi laterali, in particolare nelle curve sinistrorse per la presenza di siepi anabbaglianti o di dispositivi di ritenuta, e nelle gallerie. In galleria la pendenza trasversale minima può essere ridotta al 1 %.
Curve a raggio variabile
Le curve a raggio variabile devono essere inserite fra due elementi di tracciato a curvatura costante (due curve circolari od una curva circolare ed un rettifilo): lungo esse, infatti, si realizza il graduale passaggio della pendenza trasversale della piattaforma dal valore proprio di un elemento a quello relativo all’elemento successivo. Questo passaggio si ottiene facendo ruotare la carreggiata, o parte di essa, secondo i casi, intorno al suo asse ovvero intorno alla sua estremità interna. E’ preferibile che tale asse sia quello della carreggiata, perché ciò comporta un sollevamento minore del bordo esterno della piattaforma (è questo il caso delle strade tipo C). Per le strade a doppia carreggiata con larghezza dello spartitraffico minore di 4.00 m, per evitare che questo acquisti una pendenza trasversale eccessiva, la rotazione avviene intorno al ciglio interno di ciascuna carreggiata. Le curve a raggio variabile sono progettate in modo da garantire:
• una variazione di accelerazione centrifuga non compensata (contraccolpo) contenuta entro valori accettabili;
• una limitazione della pendenza (o sovrapendenza) longitudinale delle linee di estremità della piattaforma;
• la percezione ottica corretta dell’andamento del tracciato.
La curva a raggio variabile maggiormente impiegata è la clotoide, che è una particolare curva della famiglia delle spirali generalizzate, definite dalla seguente equazione:
1
n n
r s
×
=
A
+Dove :
r = raggio di curvatura nel punto P generico s = ascissa curvilinea nel punto P generico A = parametro di scala
Ponendo n=1 si ottiene l’equazione della Clotoide, il cui grafico è riportato in Figura 8. 2
r s
× =
A
Figura 8: Clotoide Dove :F = punto finale della clotoide
R = raggio dell’arco di cerchio da raccordare L = lunghezza dell’arco di clotoide
τp = angolo di deviazione nel generico punto P
τf = angolo di deviazione nel punto finale della clotoide
Criteri di verifica
Per una corretta progettazione di un tracciato stradale occorre che le clotoidi rispondano a dei requisiti i quali, nascono da considerazioni relative alla sicurezza degli utenti della strada e si traducono in delle verifiche numeriche da effettuarsi esclusivamente sul parametro A.
a) Criterio 1 : limitazione del contraccolpo
Affinché lungo un arco di clotoide si abbia una graduale variazione dell’accelerazione trasversale non compensata nel tempo (contraccolpo c), fra il parametro A e la massima velocità, V (km/h), desunta dal diagramma di velocità, per l’elemento di clotoide deve essere verificata la relazione:
2
0.021
A
≥
×
V
Dove :
A = parametro della clotoide
V = massima velocità per l’elemento da raccordare [km/h]
b) Criterio 2 : sovrapendenza longitudinale delle linee di estremità della carreggiata
Nelle sezioni di estremità di un arco di clotoide, la carreggiata stradale presenta differenti assetti trasversali, che vanno raccordati longitudinalmente, introducendo una sovrapendenza nelle linee di estremità della carreggiata rispetto alla pendenza dell’asse di rotazione. Nel caso in cui il raggio iniziale sia di valore infinito (rettilineo o punto di flesso), il parametro deve verificare la seguente disuguaglianza: min max
100
i(
i f)
R
A
A
B q
q
i
≥
=
×
×
+
Δ
Dove :Bi = distanze fra l’asse di rotazione ed il ciglio della carreggiata nella sezione iniziale della curva raggio variabile
Dimax = sovrapendenza longitudinale massima della linea costituita dai punti che distano Bi dall’asse di rotazione; in assenza di allargamento essa coincide con l’estremità della carreggiata
100
ci i
i
q
=
con ici = pendenza trasversale iniziale in valore assoluto100
cf f
i
q
=
con icf = pendenza trasversale iniziale in valore assolutoFigura 9: Rotazione della piattaforma lungo il raccordo
Nel caso in cui anche il raggio iniziale sia di valore finito (clotoide di continuità) il parametro deve verificare la seguente disuguaglianza:
min max
(
)
1
1
100
i f i i fB q
q
A
A
i
R
R
−
≥
=
⎛
⎞ Δ
−
×
⎜
⎟
⎜
⎟
⎝
⎠
Dove :Ri = raggio nel punto iniziale della curva a raggio variabile [m] Rf = raggio nel punto finale della curva a raggio variabile [m]
c) Criterio 3 : percezione ottica del raccordo e dell’arco di cerchio
Per garantire la percezione ottica del raccordo deve essere verificata la seguente disuguaglianza:
3
R
A
≥
(Ri/3 in caso di clotoide di continuità)
Inoltre, per garantire la percezione dell’arco di cerchio alla fine della clotoide, deve essere:
A
≤
R
Il campo di dei valori che il parametro A della clotoide può assumere nel rispetto dei tre criteri di verifica sopra esposti è mostrato in Figura 10.
Figura 10: Valori ammissibili del parametro A
Dove :
[
]
2 min max max127
( )
p tV
R
f
V
q
=
+
A
min=
0.021
×
V
p2In caso di clotoide di continuità:
R
i3
< <
A
R
Il dettaglio delle verifiche per ciascuna clotoide di ciascun Tracciato è riportato in Appendice A.
4.5 ANDAMENTO ALTIMETRICO DELL’ASSE
L’andamento altimetrico (o profilo longitudinale) consiste nella proiezione dell’asse stradale su di una superficie cilindrica a generatrici verticali avente come direttrice il tracciato orizzontale quando questa superficie viene sviluppata su un piano.
Il profilo altimetrico è costituito da tratti a pendenza costante (livellette), collegati da raccordi verticali convessi e concavi: è infatti necessario inserire raccordi curvilinei tra due livellette consecutive, per motivi di sicurezza, confort dell’utente e regolarità di marcia.
La normativa prescrive per strade di categoria C una pendenza massima delle livellette pari al 7%, valore che può essere incrementato di una unità qualora risulti che lo sviluppo della livelletta si tale da non penalizzare eccessivamente la circolazione. Nei tracciati proposti sono presenti tratti con pendenza dell’ 8% e lunghezza massima di 500 m.
Per ciò che concerne i raccordi verticali sono indicati come preferibili quelli di tipo parabolico, poiché, avendo una variazione di pendenza per unità di lunghezza costante, appaiono migliori dal punto di vista del moto. Il tracciamento del raccordo verticale con arco di circonferenza risulta ,invece, poco pratico, tenuto conto che difficilmente la verticale per il punto d’incontro delle due livellette da raccordare coincide con la bisettrice dell’angolo che esse formano. Di conseguenza, sebbene la lunghezza del raccordo si calcoli come arco di curva circolare, si preferisce effettuare il suo tracciamento come arco di curva parabolica di pari lunghezza.
Lo sviluppo dell’arco parabolico si determina con la seguente espressione:
100
v
i
L
=
R
×
Δ
Rv = raggio del cerchio oscuratore nel vertice della parabola
Δi = variazione di pendenza delle livellette da raccordare da calcolare come mostrato in Figura 10.
Figura 10: Calcolo del Δi
L’equazione utilizzata per tracciare l’arco di parabola da inserire tra due livellette è, rispetto al sistema cartesiano indicato in Figura 11, la seguente:
2
y
=
bx ax
−
Figura 11: Raccordo parabolico sul piano cartesiano
Dove : 1 100 2 2 v i a L R Δ = = × 1001 i b=
1 2
v
R a
= raggio del cerchio oscuratore nel vertice A
100 2 v 100 i i L R a Δ Δ = = ×
× lunghezza dell’arco di parabola
1 1 100 a v i i x L R i = × = ×
Δ ascissa del punto a tangente orizzontale
2 1
100
a a a
i
y = × −x ax ordinata del punto a tangente orizzontale
8 100
v
R i
f = ⎛⎜ Δ ⎞⎟
⎝ ⎠ distanza fra la tangente per A e li punto V
Il raccordo parabolico, dati i1 ed i2, è definito se si conosce il raggio Rv del cerchio oscuratore nel vertice. La determinazione del valore minimo di Rv è basata essenzialmente su tre criteri:
1. garantire che nessuna parte del veicolo (eccetto le ruote) abbia contatti con la superficie stradale, il che impone:
min
20
v vR
≥
R
=
m
nei dossi min40
v vR
≥
R
=
m
nelle sacche2. assicurare il comfort dell’utente; si ottiene limitando l’accelerazione verticale: 2 lim p v v
v
a
a
R
=
≤
Dove :vp = velocità di progetto [m/s] desunta dal diagramma delle
velocità
Rv = raggio del raccordo verticale alim = 0,6 m/s²
In ogni caso, al di là delle verifiche secondo i criteri sopraesposti e che conducono alla determinazione di raggi da intendersi come minimi, è opportuno adottare valori anche sensibilmente maggiori, al fine di garantire una corretta percezione ottica del tracciato, in particolare nei casi di piccole variazioni di pendenza delle livellette e nei casi di sovrapposizione di curve verticali con curve orizzontali (torsione dell'asse).
Nei Tracciati presentati in questo studio si è cercato, con successo, di seguire questa ultima indicazione utilizzando raggi oscuratori dell’ordine dei 5000-10000 m a fronte valori di 1500-3000 m ottenuti rispettando i tre criteri suddetti. Il dettaglio delle verifiche è riportato in Allegato A.
Il dover garantire le varie distanze di visibilità porta ad una distinzione nella metodologia di calcolo per i raccordi convessi e concavi.
Raccordi verticali convessi: dossi
In questo caso, il raggio del raccordo verticale deve essere tale da garantire la visibilità sul raccordo per la sicurezza della circolazione. Dovendo in ogni caso garantire la possibilità di arrestarsi di fronte ad un ostacolo anche di piccole dimensioni, la distanza di visibilità D tra l’occhio del conducente e l’ostacolo deve essere pari alla distanza di arresto Da. Nel caso in cui, nelle strade a due corsie con doppio senso di marcia, si voglia assicurare il sorpasso, si dovrà assumere D = Ds (distanza di visibilità per il sorpasso).
Sulla base di tutte queste considerazioni, il raggio minimo del raccordo verticale si determina come di seguito, distinguendo il caso in cui D è inferiore allo sviluppo L del raccordo da quello in cui invece D è superiore alla lunghezza L. 1) Caso D < L :
(
)
2 1 2 1 22
2
vD
R
h
h
h
h
=
×
+ + ×
×
2) Caso D > L : 1 2
2
1 22 100
100
vh
h
h
h
R
D
i
i
⎛
+ + ×
×
⎞
×
=
⎜
⎜
−
⎟
⎟
Δ
⎝
Δ
⎠
Dove :Rv = raggio del raccordo verticale convesso D = distanza di visibilità da garantire
Δi = variazione di pendenza delle livellette
h1 = altezza sul piano stradale dell’occhio del conducente h2 = altezza dell’ostacolo
Si pone di norma h1=1,10 m. In caso di visibilità per l’arresto di un veicolo di fronte ad un ostacolo fisso, si pone h2=0,10 m; mentre, in caso di visibilità per il sorpasso, h2=1,10 m. I valori del raggio minimo ottenuti con le formulazioni ora descritti sono riassunti negli abachi riportati nelle Figure 12 e 13.
Figura 13: Abaco per il calcolo di Rv con h1=1,10m e h2=1,10m (dossi)
Raccordi verticali concavi: sacche
In questo caso, non si pongono problemi di visibilità nelle ore diurne, mentre di notte è necessario garantire che il tratto di strada illuminato dai fari abbia lunghezza non inferiore alla distanza di arresto Da.
Il problema del sorpasso non si pone neppure di notte, poiché si vedono le luci del veicolo che sopraggiunge in senso opposto: l’unica difficoltà che si può avere consiste nel fatto che l’utente può non stimare correttamente la distanza a cui si trova il veicolo sopraggiungente in senso opposto.
Sulla base di tutte queste considerazioni, anche in questa circostanza, il raggio minimo del raccordo verticale si determina come di seguito, distinguendo il caso in cui Da è inferiore allo sviluppo L del raccordo da quello in cui invece Da è superiore alla lunghezza L.
1) Caso Da < L :
(
)
22
sin
a v aD
R
h
D
θ
=
× +
×
2) Caso Da> L :(
)
2 100
100
sin
v a aR
D
h
D
i
i
θ
×
⎡
⎤
=
⎢
−
× +
×
⎥
Δ
⎣
Δ
⎦
Dove :Rv = raggio del raccordo verticale convesso Da = distanza di visibilità da garantire
Δi = variazione di pendenza delle livellette
h = altezza sul piano del centro dei fari del veicolo
θ = divergenza verso l’alto del fascio di luce rispetto all’asse del veicolo Di norma si pone h=0,5m e t=1°. I valori del raggio minimo ottenuti con le formule ora descritte sono riassunti nell’abaco riportato in Figura 14.
4.6 INTERSEZIONI A ROTATORIA
La rotatoria è un tipo di sistemazione delle intersezioni a raso fra più strade, costituita da un anello stradale nel quale confluiscono i bracci della intersezione, il quale viene percorso dal flusso proveniente da ciascun braccio nel tratto compreso fra la sezione di immissione di questo ultimo e quella del braccio di uscita. Caratteristica distintiva delle rotatorie rispetto ad altri tipi di intersezioni a raso è quella di non attribuire priorità ad alcuna delle strade che si intersecano: essa è pertanto particolarmente idonea in quelle situazioni in cui tali strade sono dello stesso livello gerarchico.
Si distinguono quelle oggi denominate rotatorie convenzionali nelle quali l’anello ha un grande diametro (40÷50 m) ed i bracci mantengono costante la sezione trasversale fino al punto di immissione nella rotatoria, da quelle nelle quali il diametro è molto più ridotto (< 40 m), e pertanto vengono denominate rotatorie compatte ed i bracci presentano un allargamento, anche notevole, in corrispondenza delle immissioni. In questo modo si fornisce ai veicoli in attesa di immettersi nell’anello la possibilità di disporsi in più file, e quindi di sfruttare in modo più efficace i gap che si presentano nella corrente che percorre l’anello.
Vengono inoltre utilizzate, essenzialmente in ambito urbano, rotatorie caratterizzate da un diametro dell’isola centrale molto piccolo, inferiore ai 4 m, e con un diametro esterno dell’anello compreso fra 14 e 25 m. Queste, dette minirotatorie, vengono utilizzate quando, in uno spazio molto ridotto, si vuole trasformare lo schema circolatorio tipico di un incrocio stradale urbano in quello proprio di una rotatoria. Nelle minirotatorie l’isola centrale non è più invalicabile, e spesso viene semplicemente dipinta sulla pavimentazione dell’incrocio; in altri casi viene resa evidente differenziandone la pavimentazione da quella dell’anello. In questo modo la rotatoria è percorribile anche da veicoli di ingombro superiore a quello delle autovetture. Una sistemazione a rotatoria presenta una serie di aspetti positivi, tra cui:
• la connotazione di un luogo;
• la moderazione del traffico (la rotatoria invita a percorrere traiettorie comportanti una riduzione della velocità);
• la riduzione dei punti di conflitto (una rotatoria a quattro rami, con una corsia nell’anello ed alle entrate, ha 8 punti di conflitto contro i 32 di un incrocio analogo);
• la riduzione dei tempi di attesa;
• la flessibilità degli itinerari, data la semplice possibilità di invertire la marcia;
• una segnaletica stradale semplificata.
La realizzazione di una rotatoria è però da sconsigliare in mancanza di spazio, o comunque in un contesto eccessivamente costruito, che non consente sufficiente visibilità e raggi di curvatura congruenti, ed in presenza di irregolarità plano-altimetriche: essa infatti richiede grandi spazi e terreni pressoché pianeggianti. Inoltre questo tipo di intersezione, non attribuendo priorità ad alcuna delle strade che si intersecano (essa disciplina ugualmente tutto il traffico entrante), è particolarmente idonea in quelle situazioni in cui tali strade sono dello stesso livello gerarchico.
La politica odierna tende a privilegiare le intersezioni a rotatoria a scapito di quelle lineari, poiché queste ultime sono spesso sede di gravi incidenti. Generalmente nelle intersezioni le manovre più rischiose sono le svolte a sinistra, poiché oltre alla notevole differenza di velocità esistente tra chi svolta e chi prosegue dritto, il pericolo è rappresentato dal fatto che queste due manovre presentano punti di conflitto sotto angoli di 90°. Le rotatorie eliminano di fatto questo rischio, poiché ad ogni ramo d’entrata obbligano la svolta a destra; inoltre, essendo caratterizzate da velocità operative minori, portano ad incidenti meno frequenti e meno severi. Le rotatorie risultano vantaggiose anche dal punto di vista dei tempi di attesa: infatti l’utilizzo del segnale di “dare precedenza” piuttosto dello “Stop” spesso comporta un
tempo di attesa minore ed inoltre, in genere, la somma dei tempi di attesa risulta inferiore a quella di un incrocio semaforizzato di analoga capacità. Sulla base di queste considerazioni, nell’ambito di questo studio, si è scelto di utilizzare questo tipo di intersezione preferendola anche alla soluzione a piani sfalsati per ragioni di minor impatto ambientale.
Posizionamento delle rotatorie
Per ragioni di sicurezza la geometria della rotatoria deve essere facilmente leggibile: dopo aver identificato la presenza di una rotatoria, l’utente della strada deve riconoscere rapidamente i differenti elementi che la compongono: l’isola centrale, le isole separatrici dei flussi in ingresso e in uscita, l’anello centrale, i bracci di ingresso e di uscita. Nel progettare una rotatoria, è opportuno tenere presente i punti seguenti, al fine di favorire la percezione e la leggibilità della rotatoria stessa:
• è opportuno evitare un posizionamento dell’incrocio in curva o all’uscita da una curva; in particolare la posizione dell’isola centrale è ottimale quando tutti gli assi dei bracci che confluiscono nella rotatoria passano per il centro della rotatoria stessa. Se non è possibile realizzare una configurazione di questo tipo, si può permettere una leggera eccentricità verso destra, mentre è da evitarsi che la direzione del braccio induca un ingresso tangenziale;
• è opportuno escludere una configurazione dell’approccio alla rotatoria in “curva e contro-curva”;
• è opportuno non posizionare dei filari di alberi lungo i bracci di accesso alla rotatoria che possono dare l’illusione di continuità dell’itinerario; • è da escludere un’isola centrale di forma non circolare;
• è da escludere un anello di larghezza variabile;
• è da escludersi una pendenza dell’anello circolare verso l’interno della rotatoria;
• è da evitare la presenza di una corsia specializzata per la svolta a destra sull’anello.
Dimensioni generali e geometria delle rotatorie
Si è già detto delle tre tipologie fondamentali di rotatorie in base al diametro della circonferenza esterna:
• rotatorie convenzionali con diametro esterno compreso tra 40 e 50 m; • rotatorie compatte con diametro esterno compreso tra 25 e 40 m; • mini rotatorie con diametro esterno compreso tra 14 e 25 m.
Un ulteriore elemento distintivo tra le tre tipologie fondamentali di attrezzatura rotatoria è rappresentato dalla sistemazione dell’isola circolare centrale che può essere resa in parte transitabile per le manovre dei veicoli pesanti nel caso di mini-rotatorie con diametro esterno compreso fra 25 e 18, mentre lo diventa completamente per quelle con diametro compreso fra 18 e 14 m; le rotatorie compatte sono invece caratterizzate da bordure non sormontabili dell’isola centrale. In linea generale è conveniente generalizzare, per tutte le rotatorie, la priorità di circolazione nell’anello rispetto ai bracci, e pertanto i veicoli che transitano sulla corona giratoria devono avere la precedenza sugli altri in entrata. E’ quindi importante prevedere una attrezzatura segnaletica sia orizzontale sia verticale che elimini ogni possibile dubbio sul diritto di precedenza dei veicoli all’interno della corona.
In base alla classificazione delle intersezioni riportata al paragrafo 4.1 la previsione di adozione di mini rotatorie viene limitata agli incroci tipo F/F delle strade locali extraurbane,mentre le rotatorie compatte sono consentite per gli incroci tipo C/C, C/F, F/C.
La regola principale per definire la geometria delle rotatorie riguarda il controllo della deflessione delle traiettorie in attraversamento del nodo, ed in particolare le traiettorie che interessano due rami opposti o adiacenti rispetto all’isola centrale. Essendo scopo primario delle rotatorie un assoluto controllo delle velocità all’interno dell’incrocio risulta essenziale che la geometria
complessiva sia compatibile con velocità non superiori a 50 km/h. Si definisce in particolare deflessione di una traiettoria il raggio dell’arco di cerchio che passa a 1,50 m dal bordo dell’isola centrale e a 2,00 m dal ciglio delle corsie di entrata e uscita (Figura 15). Tale raggio non deve superare i valori di 100 m; è preferibile adottare valori sensibilmente inferiori a questo limite massimo.
Figura 15: Deflessione della traiettoria
La regola della deflessione va adottata sia per le minirotatorie sia per quelle compatte. Questa esigenza si traduce nel fissare dei valori minimi per l’angolo β. Infatti, per impedire l’attraversamento di un’intersezione a rotatoria ad una velocità non adeguata, è necessario che i veicoli siano deviati per mezzo dell’isola centrale. La valutazione del valore della deviazione viene
effettuata per mezzo dell’angolo di deviazione β. Per determinare la tangente al ciglio dell’isola centrale corrispondente all’angolo di deviazione β, bisogna aggiungere al raggio di entrata Re,2 un incremento b pari a 3,50 m. Per ciascun braccio di immissione si raccomanda un valore dell’angolo di deviazione β di almeno 45°.
Gli elementi geometrici principali e l’individuazione dell’angolo β sono riportati in Figura 16 e in Tabella 4; di seguito si riportano le definizioni e i valori di alcuni di questi elementi.
Re 1,2 – Il ciglio destro della carreggiata di ingresso è raccordato con il ciglio
esterno dell’anello di circolazione centrale per mezzo di un raccordo costituito da due archi di cerchio per i quali si adottano i seguenti valori:
α – L’angolo di entrata α rappresenta l’angolo tra la direzione di ingresso (individuata dalla tangente al ciglio sinistro della carreggiata di ingresso) e la tangente all’anello di circolazione. Tale angolo deve assumere valori pari a 80°÷90° per evitare velocità elevate e il mancato rispetto della precedenza; se non si possono evitare angoli di entrata minori di 70° è opportuno, per ragioni di sicurezza, realizzare una deviazione ben marcata per mezzo di un angolo β > 45°.
Ra 1,2 – Il ciglio destro dell’anello di circolazione è raccordato con il ciglio della
carreggiata del braccio per mezzo di un raccordo di uscita. In analogia con quanto detto per il raccordo di entrata, la geometria del bordo di connessione è costituita da due archi di cerchio. Per i raggi di uscita si adottano i seguenti valori: