3. MISURE RSSI
Il presente capitolo è dedicato ad una fase di misure preliminari del parametro RSSI fornito dal Reader a nostra disposizione mentre, per motivi che saranno chiariti in seguito (fondamentalmente a causa delle distanze troppo brevi) il Read Rate non verrà preso in considerazione. Questa fase di analisi preventiva è necessaria per analizzare approfonditamente il parametro che sarà poi utilizzato per la localizzazione, in modo da avere un’idea concreta di come si comporta l’RSSI di un Tag RFID UHF passivo al variare della distanza dall’antenna ricetrasmittente in un ambiente indoor: tale studio verrà eseguito per due differenti tipi di scenario, uno di spazio libero ed un secondo in presenza di un cassetto di legno. Proprio su quest’ultimo poi, nel successivo capitolo, si proseguirà con la fase di localizzazione.
3.1 Descrizione degli scenari di misura
A causa del modo in cui gli algoritmi di localizzazione utilizzano il parametro scelto per stimare le coordinate di un Tag incognito, è necessario che tale parametro, l’RSSI, abbia un andamento variabile in distanza tale da renderlo possibile. Di conseguenza, per sfruttare nel miglior modo i dati a disposizione, è necessario rilevare curve di RSSI al variare della distanza. I risultati saranno poi analizzati per capirne le caratteristiche in modo da poter implementare al meglio un algoritmo di localizzazione efficace per un cassetto intelligente. Le misure saranno effettuate in base alle seguenti indicazioni (dettagli aggiuntivi si aggiungeranno quando necessario);
misure di RSSI a step variabili in distanza tra Tag ed antenna Reader, per intervalli massimi comparabili alla lunghezza di un cassetto di grandi dimensioni;
utilizzo di un unico Tag passivo e di un’antenna Reader (prima in polarizzazione lineare, poi in polarizzazione circolare);
misure effettuate al variare di:
tipo di antenna (polarizzazione lineare, polarizzazione circolare); potenza trasmessa;
misure per cinque modelli di Tag (vedi tabella 3.1):
Produttore Modello Design dell’antenna
UPM Raflatac Rafsec G2 Dipolo corto caricato UPM Raflatac Short Dipole Dipolo corto caricato
Alien Technology ALN 9640 Dipolo corto a meandri caricato IMPINJ LAB-ID UH414 Dipolo corto ripiegato
IMPINJ Satellite (LAB-ID UH113) Dipolo ibrido con loop
Tabella 3.1 – Modelli di Tag utilizzati
Si comprende che la quantità delle misure risulterebbe proibitiva nel caso in cui venissero effettuate tutte senza alcun criterio ed in ogni caso molte di esse risulterebbero ridondanti o superflue. Per questo motivo, in base all’analisi dei risultati parziali verranno di volta in volta prese decisioni riguardo ai test che meritano di venire approfonditi perché utili allo scopo e quali invece scartare con valide motivazioni.
Near Field. A questo punto è necessario fornire una descrizione opportuna per lo
scenario entro il quale si sono ottenuti i risultati: innanzitutto, da un punto di vista del comportamento dell’antenna, ci troviamo in una regione di campo vicino, ovvero Near Field. In questa regione il trasferimento di potenza segue leggi del tipo 1 r⁄ con n > 2, n
mentre campo elettrico e magnetico non sono ortogonali tra loro e non hanno un andamento proporzionale; inoltre non si possono neppure definire parametri fondamentali come direttività e diagramma di irradiazione, dal momento che subiscono distorsioni non trascurabili, come mostrato in figura 3.1.
Sappiamo infatti che la regione di campo lontano di un’antenna è individuata quando sono verificate le seguenti tre condizioni (3.1):
⎩ ⎨ ⎧ d ≫ λ d ≫ D d > 2Dλ2 (3.1) dove:
“d” è la distanza dall’antenna, che nei seguenti test non sarà mai superiore a 1,35 metri;
“D” è la dimensione massima dell’antenna utilizzata: circa 0,25 metri; “λ” è la lunghezza d’onda.
Dunque, dal momento che il Reader utilizzato lavora ad una frequenza UHF centrata ad 866MHz [41], la lunghezza d’onda equivale a (3.2):
λ = c[m/s]f[Hz ] = 866∗103∗1086 ≅ 0,35 [m] (3.2)
e quindi nessuna delle proprietà (3.1) elencate risulta soddisfatta e la regione di appartenenza corrisponde a quella di Near Field; alle frequenze UHF, con lunghezza d’onda corrispondente a (3.2) si può infatti parlare di Far Field non prima di 2,5÷3 metri di distanza, dove effettivamente le tre proprietà iniziano ad essere valide con buon margine.
Appurata questa considerazione, vengono descritti di seguito i due set-up di misura adottati:
− scenario di spazio libero;
− scenario in presenza del cassetto.
Scenario di spazio libero. Si tratta di un ambiente indoor, caratterizzato dalla
presenza di molti ostacoli interferenti da un punto di vista elettromagnetico: un valido esempio può essere quello di un ufficio oppure un laboratorio, ma in ogni caso si tratta di un’ambientazione priva di ostacoli in prossimità della regione di campo vicino dell’antenna Reader. Questa scelta sostanzialmente si differenzia dal caso in cui si introduca il cassetto di legno, fornendo quindi prestazioni migliori dal punto di vista delle interazioni con l’ambiente circostante, ma caratterizzante pur sempre una locazione
realistica, grazie alla quale si possa tenere conto di tutti i problemi da questo derivanti. Ciò non sarebbe accaduto se si fossero fatte le prime misure in camera anecoica, la quale avrebbe portato a risultati ideali e difficilmente confrontabili con la realtà della localizzazione in un ambiente indoor.
In figura 3.2-a si riporta innanzitutto il posizionamento della strumentazione, vale a dire il Reader collegato all’antenna ed un PC mediante il quale saranno memorizzate le acquisizioni: il tutto è stato sempre posizionato posteriormente all’antenna, in una zona dunque dove l’irradiazione è la minima possibile, in modo tale da evitare interferenze indesiderate. Invece nelle figure 3.2-b e 3.2-c si riporta la disposizione di tale set-up di misura, in cui l’antenna ed i Tag (in realtà sarà utilizzato un solo Tag per volta) sono poggiati su un tavolo di legno situato all’interno del laboratorio: si noti tra l’altro la presenza di armadietti, pareti, sedie ed ostacoli di simile natura nei pressi del tavolo di misura.
(a) (b)
(c)
Figura 3.2 – Set-up delle misure in spazio libero
Scenario con cassetto. E’ sostanzialmente identico a quello di spazio libero
descritto in precedenza, con l’unica differenza che viene introdotto un cassetto di legno dalle misure di 40x80 cm2, lo stesso che poi sarà utilizzato per l’implementazione
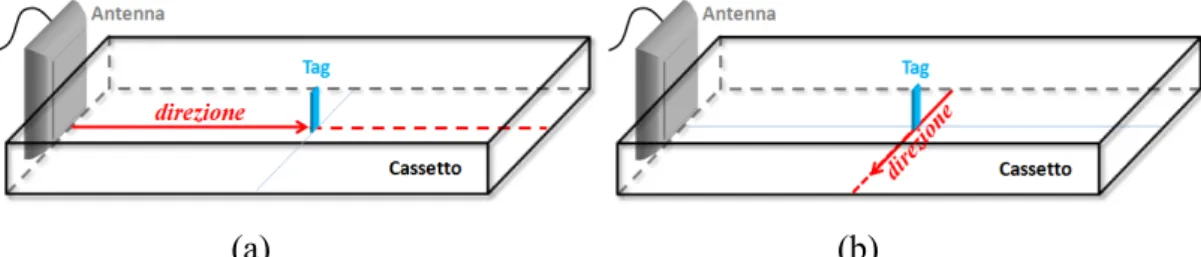
dell’algoritmo di stima. Questo set-up di misure ha lo scopo di valutare le prestazioni del sistema e le eventuali variazioni rispetto al caso precedente, mettendosi in una condizione più vicina alla realtà della localizzazione: il passo successivo a questo, non implementato, sarebbe quello di inserire tale cassetto all’interno del proprio scenario, quale ad esempio una cassettiera. Quanto descritto è visibile nelle figure 3.3-a e 3.3-c, dove l’antenna è posizionata sul lato corto del cassetto: si tenga presente che questo è solamente uno dei tre casi in cui è stata disposta l’antenna relativamente al cassetto, casi che verranno studiati singolarmente. In figura 3.3-b si vede in particolare anche la disposizione della strumentazione, Reader e PC, posti dietro all’antenna.
(a) (b)
(c)
Figura 3.3 – Set-up di misura con cassetto, con riferimenti
3.1.1 Strumentazione: Reader A528, antenne
Il Reader CAEN RFID A528 [41]. Per tutte le misure effettuate in questa tesi
verrà utilizzato un Reader compatto fornito da CAEN RFID: il modello in questione è l’A528 ed è mostrato nello specifico in figura 3.4-a. Per l’interfaccia con un PC è invece necessario applicarlo ad una scheda elettronica denominata A258ADAT “Adapter Board” [42] specificatamente progettata per questo lettore: la scheda funziona da adattatore fornendo in uscita connessioni USB o RS232 per connessione a PC. Lo strumento nel complesso è dunque presentato in figura 3.4-b.
(a) (b)
Figura 3.4 – Il Reader utilizzato: CAEN RFID A528 OEM
Specifiche. I parametri di maggior interesse per questo lavoro fornite dal Reader, sono i
seguenti:
presenza di software di controllo tramite PC remoto (descritto di seguito);
bande frequenziali UHF: 902÷928MHz e 865,6÷865,7MHz (in questi test verrà utilizzata la banda europea intorno a 866MHz);
potenza di uscita, regolabile fino a 500mW in 8 step: 10mW, 25mW, 50mW, 100mW, 200mW, 300mW, 400mW, 500mW;
un unico connettore per antenne (di tipo micro-SMA);
parametri di maggior interesse forniti in uscita dal software: codice identificativo, RSSI (in questo caso espresso in dBm) ed efficienza (Read Rate espresso in percentuale) provenienti da ogni Tag che venga letto dal Reader.
E’ necessario fornire altre considerazioni aggiuntive riguardo a tali parametri citati. Read Rate: sebbene venga fornita dal Reader l’indicazione percentuale
dell’efficienza di lettura dei Tag (o Read Rate), essa non verrà utilizzata in quanto è stato riscontrato che, per distanze così brevi quali quelle analizzate in questo lavoro (non più di 135cm), al variare della distanza l’efficienza assume sempre un valore di 100% (nel caso in cui la potenza sia adeguata e non ci siano cancellazioni di segnale dovute alle interferenze multipath). Nel caso in cui si provi poi a diminuire la potenza in trasmissione, una volta raggiunta una certa soglia minima si vede passare il parametro dal 100% direttamente allo 0% in modo netto e discontinuo, dunque senza alcun decadimento in funzione della distanza. Un fenomeno di netto azzeramento dell’efficienza si riscontra anche quando, a causa del multipath, non si riesce a ricevere alcun segnale da posizioni sfortunate. Per questi motivi risulta impossibile l’utilizzo di questo parametro in alcun algoritmo di localizzazione, almeno con questo particolare modello di Reader.
RSSI: come ampiamente spiegato nel capitolo precedente, il parametro RSSI non ha una definizione standard e dunque, prima di procedere con le misure è assolutamente necessario chiarire come vada interpretato il numero RSSI generato dal software durante la lettura di un Tag. Verrà fornita inoltre un’illustrazione chiara del comportamento di questo particolare Reader in varie situazioni.
Innanzitutto il software di lettura fornisce in uscita un numero a cinque cifre decimali identificato come “RSSI”: il produttore (CAEN RFID) fornisce una formula per convertire tale dato in un valore di RSSI in dBm (dBmilliwatt), dunque l’RSSI fornito dal Reader in questione è quello definito in precedenza come potenza ricevuta (dal Tag) in dBm. Nelle formule (3.3) (3.4) se ne riporta per completezza la definizione già analizzata nel precedente capitolo.
RSSIdBm = 10 log10�1 [mW ]Pr[W]� [dBm] (3.3) con
P r = Pt�G4πdtGrλ� n
Pt = Potenza trasmessa [W]
Pr = Potenza Ricevuta [W]
Gt, = Guadagno dell’antenna trasmittente
Gr, = Guadagno dell’antenna ricevente
λ = Lunghezza d’onda del segnale [m]
d = Lunghezza della tratta di andata e ritorno Reader - Tag [m] n = Costante di attenuazione del mezzo di trasmissione
Naturalmente è possibile, una volta ottenuto l’RSSIdBm convertirlo in scala lineare
(Pr [mW]) mediante l’inversione della formula logaritmica.
Andamento dell’RSSI al variare della potenza. E’ necessaria una ulteriore
chiarificazione del comportamento del parametro RSSI tra Reader e Tag passivi per comprendere i risultati che saranno ottenuti al variare della potenza utilizzata in trasmissione. Sia il Reader che i Tag utilizzati hanno delle protezioni interne le quali si presentano mediante i seguenti fenomeni di saturazione:
i Tag passivi sono corredati da un circuito tagliatore (essenzialmente un circuito comprendente diodi Zener) che interviene quando il Tag riceve una potenza eccessiva, questo per evitare che la tensione ai capi del chip superi i valori massimi accettabili;
il ricevitore del lettore possiede a sua volta un circuito limitatore che interviene per gli stessi motivi, in caso di potenza ricevuta eccessivamente alta: nel caso di Tag passivi comunque, questo secondo fenomeno a differenza del precedente si presenta raramente, a causa della bassa potenza di backscattering.
In tabella 3.2 a pagina seguente si riportano delle misure per varie potenze e distanze, effettuate con il Reader A528 ed un Tag passivo (UPM Raflatac Rafsec G2), proprio per chiarire quanto appena affermato.
Prova Numer Potenza Trasmess Distanza Reader-Tag RSSI (dBm) Note
#1 100mW 5,2m -56,7 Limite della distanza di lettura con 100mW
#2 200mW 5,2m -53,5
#3 400mW 5,2m -51,9
#4 100mW 1m -47,9 Tag già in saturazione con soli 100mW
#5 200mW 1m -47,1 #6 400mW 1m -47,1 #7 100mW 0,3m -41,5 #8 100mW 1m -43,1 #9 100mW 2m -46,3 #10 100mW 3m -48,7
Tabella 3.2 – Test RSSI al variare della potenza e della distanza
La prova #1 è un caso in cui il Tag si trova a grande distanza dall’antenna, precisamente al limite della distanza di lettura con 100mW, che è risultata essere di 5,2m: si nota quindi dalle prove #1, #2, #3 che quando il Tag è molto lontano dall'antenna, l'andamento dell’RSSI è crescente con la potenza del lettore come ci si dovrebbe aspettare dalla teoria: tra 100mW(=20dBm) e 200mW(=23dBm) la differenza di RSSI è di 3,2dBm, molto vicina ai 3dBm teorici, tra 100mW e 400mW(=26dBm) è solo leggermente inferiore, ma sempre accettabile (circa 5dBm contro i 6dBm teorici). Nelle prove #4, #5, #6 invece il Tag è stato posto ad una vicinanza tale da mandarlo a saturare già con 100mW di potenza dal Reader: così facendo si apprende che quando siamo vicini all'antenna il valore di RSSI risulta indipendente dalla potenza trasmessa (a meno di circa 1dBm di variazione dovuta al rumore dell’ambiente indoor e dall’accuratezza del Reader stesso).
Infine nelle prove #7, #8, #9, #10 a parità di potenza (nel caso 100mW), si va a misurare l'RSSI in funzione della distanza, il quale decade come previsto dalla teoria per il fatto che alla distanza di 2m i 100mW in trasmissione non sono più sufficienti a far saturare il Tag.
Dopo aver appreso il modo in cui l’RSSI varia in funzione di potenza e distanza, ci si rende conto facilmente che il modo più ragionevole di effettuare le misure che seguiranno è quello di impostare fin dall’inizio un certo livello di potenza che assicuri di mandare il Tag in saturazione anche alla massima distanza testata, questo per evitare di avere due comportamenti diversi del sistema al variare della distanza e cioè Tag in saturazione per brevi distanze e Tag in funzionamento lineare (con la potenza) per distanze maggiori: una tale scelta avrebbe reso i dati acquisiti molto difficili da interpretare, in quanto affetti da una non linearità intrinseca nel modo di procedere stesso. L’unica altra possibilità per non incorrere in tale comportamento discontinuo, poteva essere quella di utilizzare una potenza talmente bassa da non far saturare il Tag nemmeno in prossimità dall’antenna, ma in questo caso il Read Range sarebbe risultato eccessivamente ridotto.
Per questi motivi è stata scelta una potenza in trasmissione tipica di 300mW: come si vedrà comunque, prove al variare della potenza sono in ogni caso state eseguite anche nello scenario di misura, in modo da confermare quanto appena detto.
Considerazioni sul software di gestione del Reader e sull’accuratezza dei dati rilasciati. Per l’acquisizione dei dati tramite il software fornito con il Reader, è
necessario avviare la procedura mediante un’interfaccia utente molto semplice (un click del mouse su “start”): a questo punto il Reader inizia ad interrogare periodicamente i Tag presenti nel range di lettura dell’antenna per più volte al secondo (circa 5 letture al secondo), acquisendone ogni volta l’identificativo e visualizzando, oltre all’efficienza di lettura, l’RSSI istantaneo ricevuto in ognuno di questi cicli, fino a che l’utente non interrompe la lettura (semplice click su “stop”). All’interno di questa finestra temporale di acquisizione si è notato che, il valore di RSSI ricevuto ad ogni ciclo a parità di condizioni del Tag (stessa potenza, distanza ecc), non è un numero costante, bensì è piuttosto un valore che oscilla all’interno di un certo range: tale fenomeno è dovuto probabilmente sia al rumore dell’ambiente circostante che della circuiteria interna del Reader stesso. Purtroppo il software permette di memorizzare in un file di testo solamente i dati acquisiti all’ultimo ciclo, cioè il valore presentato sul monitor alla pressione del tasto di stop. Per validare il livello di tali oscillazioni, sono state eseguite
delle misurazioni mirate a questo scopo, in modo da arrivare a conoscere i parametri statistici di queste oscillazioni, per poterne così tenere conto, fornendo tra l’altro una misura dell’accuratezza dei dati a disposizione.
Un secondo aspetto riguarda il dato di efficienza di lettura fornito: il software visualizza in tempo reale l’efficienza in termini di percentuale di letture avvenute con successo e tale percentuale è sempre calcolata su una finestra mobile comprendente le ultime 30 letture da ogni Tag. Per questo motivo è stato deciso che l’acquisizione del parametro di RSSI in tutte le misure che seguiranno, venga effettuata almeno dopo la trentesima acquisizione, nel momento in cui cioè il software rilascia il primo dato di efficienza ed in ogni caso solamente per un’efficienza maggiore del 90%. Se tale valore non venisse raggiunto dopo 30 letture si può ritardare l’acquisizione e nelle eventualità in cui l’efficienza non raggiunga tale soglia minima saranno prese decisioni caso per caso. Comunque, come detto a proposito del parametro di Read Rate, quando l’efficienza non raggiunge una soglia vicina al 100% dopo la trentesima lettura, nella maggior parte dei casi si attesterà dopo qualche istante a livello di 0% e di conseguenza in questo caso si annoterebbe un valore nullo di RSSI.
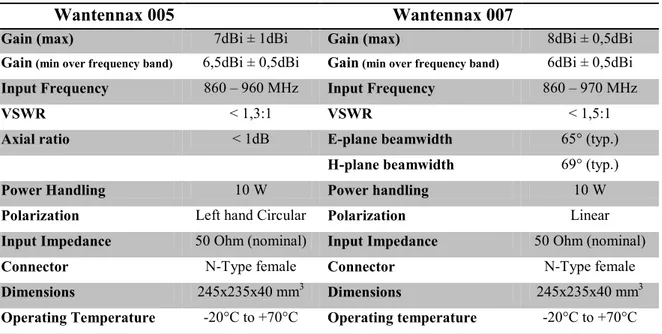
Antenne utilizzate. Sono state effettuate misure di RSSI con due antenne CAEN RFID
di aspetto esteriore identico (figura 3.5) specifiche per suddetti sistemi, che lavorano quindi alle frequenze UHF ma che sono caratterizzate da polarizzazioni differenti.
I modelli esatti sono denominati Wantennax005 (polarizzazione circolare) e Wantenax007 (polarizzazione lineare): sono teoricamente progettate per lavorare in Far Field Region anche se come abbiamo discusso, lo scenario di misura prevede distanze massime in Near Field Region: la scelta è ricaduta su queste in quanto sono adatte per lavorare con questo tipo di Reader e perché tali antenne sono caratterizzate anche da un alto guadagno [7] che ha permesso il raggiungimento delle distanze necessarie (fino a 135cm) nonostante la bassa potenza a disposizione. Sono state eseguite prove preliminari mediante altre antenne più adatte per Near Field, ma in questo caso, anche al massimo della potenza di 500mW, il Read Range dei Tag non permetteva di superare i 50cm e dunque sono state abbandonate: certamente tra gli sviluppi futuri di questo lavoro ci sarà quello della progettazione di un’antenna ad–hoc per cassetti intelligenti. Per maggiori dettagli delle antenne utilizzate si rimanda dunque ai datasheet del produttore [43]-[44] ed in Tabella 3.3 si riportano le specifiche.
Wantennax 005 Wantennax 007
Gain (max) 7dBi ± 1dBi Gain (max) 8dBi ± 0,5dBi
Gain (min over frequency band) 6,5dBi ± 0,5dBi Gain (min over frequency band) 6dBi ± 0,5dBi
Input Frequency 860 – 960 MHz Input Frequency 860 – 970 MHz
VSWR < 1,3:1 VSWR < 1,5:1
Axial ratio < 1dB E-plane beamwidth 65° (typ.)
H-plane beamwidth 69° (typ.)
Power Handling 10 W Power handling 10 W
Polarization Left hand Circular Polarization Linear
Input Impedance 50 Ohm (nominal) Input Impedance 50 Ohm (nominal)
Connector N-Type female Connector N-Type female
Dimensions 245x235x40 mm3 Dimensions 245x235x40 mm3
Operating Temperature -20°C to +70°C Operating temperature -20°C to +70°C
3.1.2 Tag utilizzati
Sono stati utilizzati cinque modelli di Tag UHF passivi, in modo da valutarne le differenze in prestazioni per poi selezionare i migliori da dedicare alla fase di localizzazione nel cassetto. Le differenze tra uno e l’altro ricadono nel tipo di design, nel chip al loro interno e nelle dimensioni fisiche complessive. In tutti i casi il materiale utilizzato per la loro produzione è rame stampato su film di poliestere e gli spessori equivalgono a quelli di un foglio di carta; altra caratteristica in comune è la compatibilità di tutti i modelli con lo standard di comunicazione EPC Class1 Gen2 [1], il più recente in ambito RFID. Qui di seguito si analizzano brevemente le loro caratteristiche e si può già affermare che sono presenti fondamentalmente due tipi di configurazione per il design dell’antenna: a dipolo o ibrida (cioè dipolo con loop) [7]. In entrambi i casi si tratta sempre di dipoli corti, infatti le loro dimensioni sono sempre abbondantemente inferiori alla lunghezza d’onda del segnale, che si ricorda vale circa λ = 35cm.
UPM Raflatac Rafsec G2 [45]: è un Tag con antenna a dipolo corto caricato alle
due estremità. Al suo interno è presente un chip U-CODE GXM/GXL [46], adatto ad applicazioni che richiedano range di lettura abbastanza sostenuti (alcuni metri); il chip inoltre è progettato con un’ottima gestione delle collisioni e dunque pensato per lavorare in ambienti dove sono presenti molti Tag. Infine il datasheet dichiara una buona resistenza alle interferenze dei materiali ed al rumore. Il Rafsec G2 misura 93x11 mm2 e
l’aspetto esteriore è mostrato in figura 3.6
Figura 3.6 – UPM Raflatac Rafsec G2
UPM Raflatac Short Dipole [47]: molto simile al precedente anche questo Tag presenta
un’antenna a dipolo corto caricato, seppur con un profilo leggermente diverso, come si vede in figura 3.7 e al suo interno si trova lo stesso chip U-CODE GXM/GXL, dunque le
considerazioni sono quelle già esposte per il Rafsec G2. Anche le dimensioni sono le stesse (93x11 mm2).
Figura 3.7 – UPM Raflatac Short Dipole
Alien Technology ALN 9640 [48]: il Tag è un dipolo corto caricato che, come mostra
figura 3.8, presenta anche meandri. Il chip in questo caso è un Higgs-3 [49] e le caratteristiche dichiarate lo classificano come Tag per grandi distanze, fino a 10 metri, a seconda del Reader utilizzato, mentre a differenza dei modelli UPM, qui non è esplicitamente dichiarato il comportamento previsto in ambienti densamente popolati. Misura 98,2x12,3 mm2.
Figura 3.8 – Alien Technology ALN 9640
Impinj LAB-ID UH414 [50]: in questo caso il design dell’antenna del Tag ha una
configurazione a dipolo corto ripiegato che ne rende le dimensioni molto compatte, misura infatti 47,5x28 mm2, mentre il chip è un Impinj Monza 4 [51]: il Tag ha
prestazioni molto buone in generale ed una portata in distanza molto grande, superiore a parità di condizioni a quella dei Tag discussi in precedenza, inoltre i chip lo rende adatto ad ambienti molto popolati ed infine l’innovativa struttura rende questo Tag percettibilmente meno sensibile alle variazioni di orientazioni (figura 3.9).
Impinj “Satellite” (LAB-ID UH113) [52]: il Tag, come mostra la figura 3.10, è
provvisto di un’antenna ibrida che presenta sia un dipolo corto che un loop e questa ultima caratteristica lo rende estremamente differente dagli altri, infatti è specificatamente studiato per lavorare in regione di Near Field dell’antenna: la portata non supera i 30÷40 cm e le migliori prestazioni si ottengono comunque entro i primi 10cm di distanza. Al suo interno ha un chip Impinj Monza 3 [53] e le dimensioni estremamente ridotte sono di 32x18 mm2.
Figura 3.10 – Impinj “Satellite”( LAB-ID UH113)
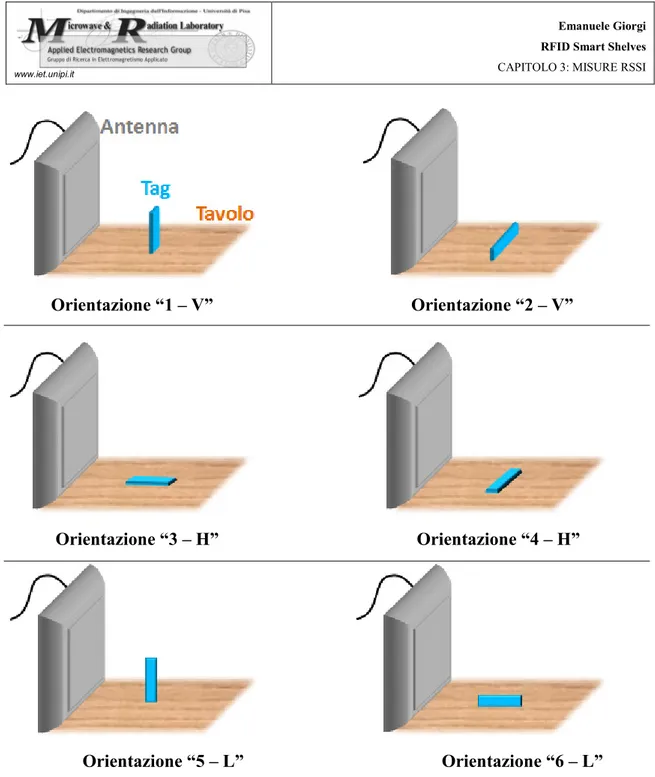
3.1.3 Orientazioni scelte per i Tag
Ogni Tag verrà misurato anche al variare dell’orientazione, in modo da valutare quanto questo aspetto possa influire su un eventuale algoritmo di localizzazione ed in ogni caso anche per verificare quale sia quella migliore per ogni Tag. Pensando alle facce di un cubo, sono state scelte sei possibili orientazioni di interesse, le quali verranno da qui in poi identificate prendendo sempre come riferimento l’antenna in modo da non creare possibili ambiguità al variare dello scenario, che potrebbero presentarsi se ad esempio si prendesse il piano del tavolo o del pavimento come riferimento. In figura 3.11 a pagina seguente si riportano le orientazioni utilizzate, le quali sono state identificate mediante un numero ed una lettera che saranno univocamente utilizzate nel resto della tesi. Una considerazione da tenere presente è che, per come sono state descritte le antenne di tutti i Tag, seppur con alcune differenze esse sono essenzialmente dei dipoli e quindi è lecito pensare ad una loro approssimazione come antenne filari; in questo modo si capisce anche intuitivamente che una rotazione dei Tag rispetto all’asse di simmetria del lato più lungo (l’asse del dipolo) non dovrebbe variarne significativamente il comportamento.
Orientazione “1 – V” Orientazione “2 – V” Orientazione “3 – H” Orientazione “4 – H” Orientazione “5 – L” Orientazione “6 – L” Figura 3.11 – Elenco delle orientazioni scelte per i Tag
Di conseguenza possono, almeno in teoria, considerarsi configurazioni molto simili le seguenti coppie (vedi figura 3.11):
1 – V (Verticale) & 5 – L (Laterale)
2 – V (Verticale) & 4 – H (Orizzontale)
Orientazioni 1 – V & 5 – L: nel caso di antenna Reader in polarizzazione verticale
dovrebbero teoricamente risultare le orientazioni preferibili, questo a causa del perfetto adattamento in polarizzazione e del diagramma di irradiazione (si pensi ad un’antenna filare) che presenterebbe un massimo in direzione dell’antenna. Per gli stessi ragionamenti sarebbero da scartare nel caso si avesse a disposizione un’antenna Reader in polarizzazione orizzontale.
Orientazioni 2 – V & 4 – H: si possono dedurre simili considerazioni al caso
precedente, semplicemente ragionando in modo opposto rispetto alle polarizzazioni ed in più si può dire che, nel caso di polarizzazione circolare dell’antenna Reader, le seguenti come le precedenti orientazioni dovrebbero comportarsi, almeno in teoria, in modo molto simile: c’è in ogni caso da tener presente l’effetto del terreno, sicuramente più consistente per un dipolo in posizione orizzontale su piano di massa, piuttosto che in verticale[7].
Orientazioni 3 – H & 6 – L: questi sono i posizionamenti più sfavorevoli per una
comunicazione con l’antenna Reader, in quanto il loro diagramma di irradiazione, come quello di un dipolo, presenta esattamente un nullo in direzione dell’antenna. Sono state comunque scelte per due motivazioni: è interessante valutare il loro comportamento in Near Field Region, dove le distribuzioni dei campi non sono più quelle ideali definite in campo lontano e potrebbero permettere un certo livello di comunicazione. Pensando inoltre alla aleatorietà che può presentare, ad esempio, l’orientazione dei medicinali in un cassetto per farmacie, ci rendiamo conto che anche questi sono casi che è necessario almeno prendere in considerazione.
3.2 Misure di Varianza
Errori intrinseci nel dato RSSI ricevuto dal sistema in esame. Questo primo test da
eseguire all’interno degli scenari di misura è necessario per valutare la bontà di tale dato in termini di accuratezza, livello di oscillazioni dovute al rumore, stabilità nel tempo, variazione della risposta da Tag diversi etc. mediante uno studio delle statistiche del segnale ricevuto. Due sono gli aspetti da analizzare:
è stato appurato che a parità di condizioni quali lo scenario di misura, la potenza in trasmissione, il design del Tag e la sua orientazione, l’antenna utilizzata e la distanza, i valori dell’RSSI ricevuti presentano un certo livello di oscillazioni nel tempo che è necessario misurare e valutare appropriatamente, in quanto è chiaro che una tale corruzione intrinseca nel segnale a disposizione apporta già un certo livello di errore ineliminabile, dovuto sia ai circuiti interni ed al software del Reader, che al rumore presente nell’ambiente circostante;
sempre a parità di condizioni, ma utilizzando Tag diversi di stesso produttore e modello, questi in generale rispondono con livelli di RSSI diversi, come già discusso (vedi figura 2.4). Questo fenomeno è dovuto essenzialmente alla precisione intrinseca nel chip interno al Tag.
Metodologia e misure. E’ stato deciso di eseguire questi test preliminari direttamente
nel set-up di misura che prevede la presenza del cassetto, dal momento che questi errori intrinseci andranno ad influire direttamente sulle stime degli algoritmi di localizzazione e quindi è utile mettersi già in queste condizioni.
Test 1: Misure di RSSI a parità di condizioni, per diversi Tag dello stesso modello
Sono stati selezionati cinque Tag per ognuno dei modelli descritti in precedenza ed è stata adottata la seguente modalità (vedere figura 3.12 a pagina seguente):
modello dell’antenna in polarizzazione circolare in quanto, come prevedibile, sarà quella utilizzata nella maggior parte dei test che seguiranno. Sarà posizionata sul lato corto del cassetto;
potenza in trasmissione del Reader di 300mW per assicurarsi di far lavorare sempre i Tag in saturazione (misure al variare della potenza saranno effettuate in seguito); per tutti i Tag è stata scelta la stessa orientazione 1–V in quanto, insieme alla 5-L,
dovrebbe fornire le prestazioni migliori del caso grazie al diagramma di irradiazione che presenta un massimo in direzione dell’antenna Reader e basse interferenze dal terreno sottostante;
per ognuno dei Tag sono stati acquisiti 10 valori di RSSI con la modalità esposta in precedenza, cioè dopo il raggiungimento di un’efficienza in lettura di almeno il 90% (quest’ultimo aspetto d’ora in poi non verrà più specificato esplicitamente, in quanto adottato in tutte le misure che seguiranno in questa tesi);
saranno calcolati poi i valori medi delle dieci acquisizioni dell’RSSI per ogni Tag, per compensare l’effetto dell’oscillazione intrinseca;
le misure sono state effettuate ovviamente a distanza “d” fissa tra Tag ed antenna e nello specifico sono state ripetute per due distanze: d1 = 21cm e d2 = 42cm.
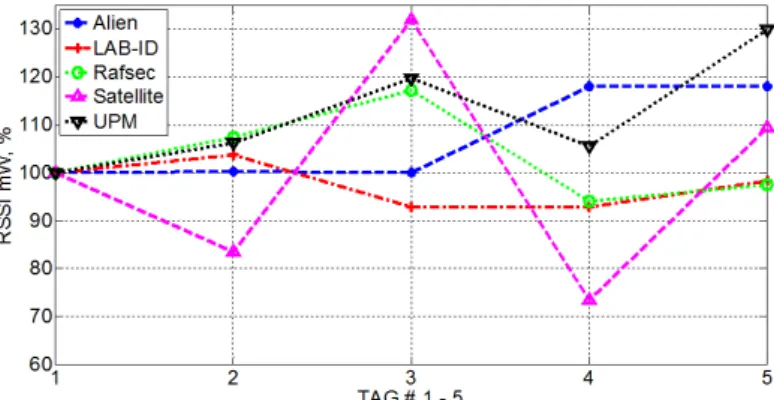
Figura 3.12 - Set-up di misura RSSI per 5 Tag di ogni modello, a parità di condizioni Risultati. In figura 3.13 e 3.14 (a pagina seguente) sono presentati i risultati
rispettivamente per le distanze d1 e d2 : i valori medi di RSSI acquisiti da ogni Tag sono
stati convertiti in mW, dopodiché a parità di modello sono state valutate le discrepanze in termini percentuali rispetto al primo Tag (#1) di ogni tipo (il Tag #1 rispetto a se stesso fornisce come valore il 100%). Effettivamente, per quattro modelli di Tag (ad esclusione dell’Impinj Satellite) si riscontrano discrepanze che variano dal 95% al 120% circa rispetto al Tag preso come riferimento; il miglior comportamento è stato riscontrato nel modello Lab ID UH414 con variazioni molto lievi dal 92% al 102% (10%
di discrepanza massima), mentre si osservi il comportamento simile dei due modelli UPM, conferma del fatto che la variazione è dovuta al chip interno (lo stesso in questo caso). Il peggior andamento è stato ottenuto nel Tag Impinj Satellite che riscontra differenze anche del 60% tra i due estremi. Confrontando i risultati alle due distanze d1 e
d2 non si notano variazioni nel comportamento descritto, le discrepanze si mantengono
su valori simili a quelli appena commentati, ad eccezione dell’Impinj Satellite che subisce variazioni più apprezzabili. Il comportamento dell’Impinj Satellite, poco soddisfacente ad entrambe le distanze, molto probabilmente è dovuto al fatto che, essendo pensato per lavorare in Near Field, le specifiche di progetto più importanti nel chip interno riguardano la capacità di rispondere, piuttosto che la stabilità del livello di potenza con il quale è in grado di farlo.
Figura 3.13 – Confronto RSSI % (mediato su 10 acquisizioni), per 5 Tag di ogni
modello a distanza 𝑑𝑑1 = 21𝑐𝑐𝑐𝑐. Discrepanze rispetto al Tag #1 preso come riferimento
di 100%.
Figura 3.14 – Confronto RSSI % (mediato su 10 acquisizioni), per 5 Tag di ogni
modello a distanza 𝑑𝑑2= 42𝑐𝑐𝑐𝑐. Discrepanze rispetto al Tag #1 preso come riferimento
Test 2: Misure di varianza per l’oscillazione dell’RSSI.
Per ottenere questo tipo di parametro statistico è stato necessario ripetere più volte, a parità di scenario, l'acquisizione dell’RSSI in funzione della distanza tra Tag ed antenna Reader per poi valutare le differenze tra le varie realizzazioni delle curve ottenute. Le specifiche per queste misure vengono elencate di seguito:
lo scenario è lo stesso del precedente e prevede l’utilizzo dell’antenna in polarizzazione circolare posta sul lato corto del cassetto ed alimentata da una potenza Reader ancora di 300mW. Per i motivi esposti nel test precedente, l’orientazione scelta per i Tag è ancora la 1–V;
vengono testati due modelli di Tag, anche per un confronto delle oscillazioni, selezionati in base al seguente criterio: è stato scelto l’UPM Raflatac Rafsec G2 come rappresentativo dei tre Tag con antenna a dipolo corto ed il Lab ID UH414 il quale si differenzia sostanzialmente per l’antenna a dipolo ripiegato, oltre che per l’utilizzo di un chip diverso. L’utilità del Tag per Near Field Impinj Satellite sarà testata in altro momento, visto che sono già previste in partenza scarse possibilità di un suo utilizzo per smart shelves mediante k-NN;
come chiarito dalla figura 3.15 vengono eseguite misure ripetute di RSSI (fino a 10 ripetizioni) al variare della distanza sia in direzione del lato lungo (da 3cm a 78cm) che del lato corto (da 3cm a 39cm) ; in entrambi i casi il Tag è posizionato al centro del cassetto rispetto all’altro lato. Lo step in distanza è di 3cm.
(a) (b)
Figura 3.15 – Set-up per le misure “RSSI –Distanza” ripetute, sul lato lungo(a) e sul
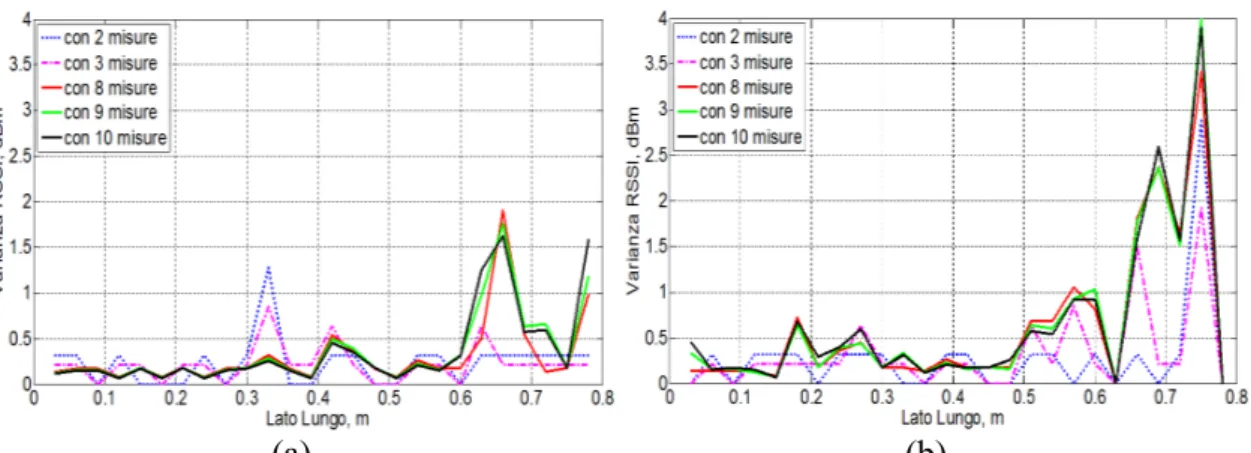
Risultati. In figura 3.16 sono riportati i risultati del calcolo della varianza dell’RSSI per
ogni step in distanza: ad ogni passo è stato acquisito un certo numero di realizzazioni di RSSI (da una a dieci) e su questi valori è stata calcolata la varianza, prima con due dati, poi con tre e così via fino a dieci. All’aumentare del numero di realizzazioni acquisite le variazioni tra una curva di varianza rispetto alla distanza e la successiva sono sempre meno apprezzabili: con 8÷10 realizzazioni si comprende che si sta propendendo verso il valore vero a cui tende la varianza del dato acquisito (al variare della distanza).
(a) (b)
Figura 3.16 – Calcolo della “Varianza RSSI – distanza” al variare del numero di prove.
Lato Lungo: Rafsec G2 (a), Lab ID UH414 (b).
In figura 3.17 sono riportate tutte le dieci realizzazioni delle curve di RSSI – distanza: il livello di errore introdotto dall’oscillazione intrinseca dell’RSSI provoca variazioni di circa 1÷2dBm a parità di distanza, con valori che aumentano sensibilmente allontanandosi dall’antenna (nel caso quindi di spostamento sul lato lungo).
(a) (b)
Figura 3.17 - 10 realizzazioni di curve “RSSI – distanza.
Confrontando i due Tag si apprende che il Lab ID UH414 è leggermente più rumoroso del Rafsec G2, ma solo dell’ordine di qualche decimo di dBm. Il calo drastico del livello di RSSI nel Lab ID per distanze di circa 65cm è un chiaro fenomeno di interferenza da multipath, che verrà discusso meglio nelle misure dei successivi paragrafi. In figura 3.18-a e 3.18-b si presentano le variazioni del livello RSSI sul lato corto: le oscillazioni sono di pari livello e non si apprezzano differenze sostanziali al variare della posizione rispetto a questa coordinata.
(a) (b)
Figura 3.18 - 10 realizzazioni di curve “RSSI – distanza.
Lato corto: Rafsec G2 (a), Lab ID UH414 (b)
Questa analisi, oltre che per valutare la varianza del dato, è servita anche per capire quante acquisizioni di RSSI da ogni Tag fossero necessarie per riuscire ad ottenere un livello sufficiente di informazioni statistiche per le oscillazioni del parametro: il chiaro risultato è che con otto, dieci realizzazioni le informazioni sono più che sufficienti. Questa considerazione verrà tenuta presente quando necessario nelle misure che seguiranno; non si riportano le misure di varianza effettuate relativamente al lato corto, che in ogni caso confermano quanto detto fino a questo punto.
Conversione dell’errore in distanza. A questo punto è interessante chiedersi come
questo errore intrinseco e quindi ineliminabile, incida in termini di centimetri sulla stima di una coordinata. Purtroppo è difficile dare una risposta univoca, in quanto l’errore commesso dipende in gran parte dal principio di funzionamento dello specifico
algoritmo che sfrutti tali dati in ingresso. Si pensi però ad un algoritmo semplice nel quale, una volta acquisito un preciso valore di RSSI, ad esso venga univocamente associata una distanza mediante il confronto con un database (nel particolare si sta parlando dell’algoritmo illustrato nel capitolo 2 per la calibrazione): in figura 3.17-a di pagina precedente è stato riportato questo esempio, dove si è enfatizzato il fatto che avendo a disposizione due differenti realizzazioni della curva, nello specifico le due più discostate (il caso peggiore), nel punto preso in esempio l’errore si traduce in un’ambiguità di circa 3cm di scarto tra l’una e l’altra. Tale valore dipende ovviamente anche dal punto considerato e dal grafico utilizzato, in ogni caso 3cm sono una buona stima dell’errore a cui in media si può venire incontro in un algoritmo di questo tipo, con una varianza del parametro di questo livello.
Si noti che, a differenza di quanto si vedrà in seguito, l’asse delle distanze sul lato lungo in questi grafici è stato riportato in scala lineare proprio per evidenziare al meglio quest’ultimo aspetto della conversione dell’errore di oscillazione in un errore in distanza.
3.3 Misure a potenza variabile
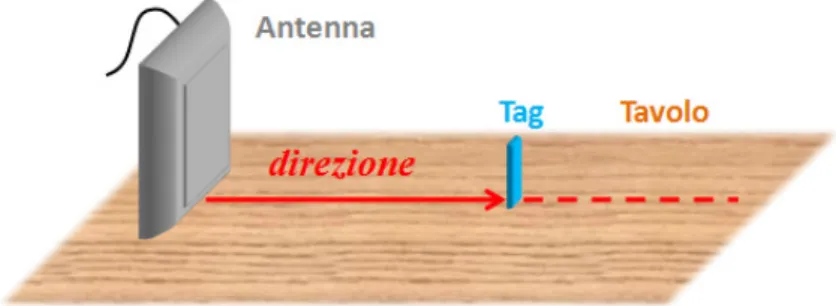
Si tratta come la precedente di un’altra misura preliminare per caratterizzare il parametro RSSI: infatti ricordandosi del funzionamento del sistema Reader - Tag, quest’ultimo a causa di un circuito tagliatore interno, se posto a breve distanza dal Reader restituisce un parametro RSSI indipendente dalla potenza trasmessa. E’ quanto vogliamo verificare in questa fase con un test più accurato eseguendo un’analisi dell’RSSI in funzione della distanza e al variare della potenza trasmessa, le cui specifiche sono riportate di seguito: scenario di spazio libero (vedi figura 3.19) ed utilizzo dell’antenna in polarizzazione
circolare;
test effettuato per il solo modello di Tag UPM Raflatac Rafsec G2 in tutte le orientazioni. Non si testano ulteriori modelli in quanto essendo tutti Tag passivi, il loro comportamento è il medesimo (tutti hanno un limitatore in parallelo alla propria antenna);
l’RSSI del Tag viene acquisito al variare della distanza da 5cm a 130cm con uno step di 5cm;
la ripetizione del test viene eseguita per tre livelli di potenza diversi: 100mW, 200mW e 300mW: il valore minimo di 100mW è stato selezionato verificando che anche alla distanza massima di 130cm il Tag risultasse essere in comportamento di saturazione, infatti come ricorda la tabella 3.2, a questa potenza il limite si raggiunge ad una distanza molto superiore, 520cm. Questo assicura che per l’intera fase del test e dunque per potenze uguali o maggiori a 100mW e distanze minori o uguali a 130cm, il comportamento non si discosterà dalla saturazione del Tag;
Figura 3.19 – Set-up di “spazio libero” per le misure di RSSI in distanza, a potenza
Risultati. La figura 3.20 conferma quanto ci aspettavamo e cioè che le tre curve di RSSI
mantengono lo stesso andamento in funzione della distanza e non si riportano differenze apprezzabili al variare della potenza trasmessa: si vede infatti che, sebbene ci sia uno scostamento tra le curve che, a parità di distanza, oscilla intorno ad 1÷2 dBm, tale scarto è ininfluente in quanto comparabile all’oscillazione intrinseca del parametro RSSI studiata nel paragrafo precedente, di conseguenza la presente oscillazione è attribuibile allo stesso fenomeno.
Si riporta solo il risultato per l’orientazione 1_V, in quanto tutte le altre orientazioni confermano quanto detto. Dopo aver appurato questo fenomeno, per le misure successive (a patto di qualche test di tipo diverso) è stato deciso di impostare sempre la potenza in trasmissione ad un livello di 300mW in modo da assicurarsi, che i Tag all’interno dello scenario lavorino sempre in saturazione.
Figura 3.20 – Confronto curve RSSI al variare della potenza (100mW,200mW,300mW)
3.4 Misure di RSSI in spazio libero
Dopo le misure preliminari dei paragrafi precedenti che hanno chiarito quale sia l’accuratezza ed in generale il comportamento del parametro a disposizione, si sono eseguiti dei test in scenario di spazio libero descritto in figura 3.21:
Figura 3.21 – Set-up di “spazio libero” per le misure di RSSI in distanza: direzione di
spostamento ortogonale all’antenna, tutte le orientazioni
Questi test saranno effettuati prendendo in considerazione entrambe le antenne per studiare il comportamento dell'RSSI al variare della polarizzazione. Inoltre è stata utilizzata una potenza in trasmissione inizialmente di 100mW con l'antenna in polarizzazione lineare: una volta passati all’antenna in polarizzazione circolare la potenza è stata definitivamente portata al valore di 300mW. Infine sono stati analizzati tutti i modelli di Tag in tutte le possibili orientazioni (figura 3.22) e per ogni configurazione è stata quindi acquisita una curva di RSSI in funzione della distanza: la direzione di allontanamento, come mostra figura 3.21 è ortogonale rispetto all’antenna per distanze da 5cm a 135cm con uno step di 5cm.
Figura 3.22 – Riepilogo delle sei orientazioni dei Tag, riferite all’antenna
Si sottolinea il fatto che è stato ritenuto sufficiente acquisire un’unica realizzazione di ognuna delle curve, visto che l’analisi della loro varianza è stata già discussa.
3.4.1. Risultati con antenna in polarizzazione lineare
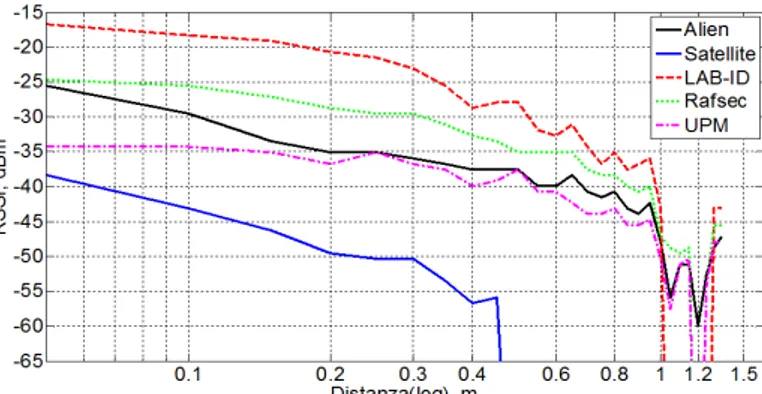
La potenza in trasmissione è stata impostata a 100mW (solo successivamente è stato deciso di aumentarla). I risultati confermano un comportamento prevedibile che accumuna tutti i Tag: con un’antenna in polarizzazione lineare si sono ottenute risposte apprezzabili nell’orientazione 1-V (figura 3.23) vale a dire in condizioni di adattamento in polarizzazione con l’antenna: si nota un andamento decrescente in distanza (oscillazioni escluse) senza discontinuità fino ad un metro, ad esclusione del Tag Impinj Satellite che conferma di avere un read range limitato a meno di 50cm.
Figura 3.23 – Confronto curve RSSI-Distanza per tutti i Tag in spazio libero;
polarizzazione lineare, PT=100mW; orientazioni 1_V
Per l’orientazione 3_H (figura 3.24), sebbene in campo lontano le antenne dei Tag producano un nullo in direzione del Reader, in campo vicino si apprezza un qualche tipo di risposta, che in ogni caso non è utilizzabile per i nostri scopi in quanto caratterizzata da un range in distanza estremamente ridotto e da una potenza in generale molto bassa.
Figura 3.24 – Confronto curve RSSI-Distanza per tutti i Tag in spazio libero;
Per le orientazioni 2_V e 4_H non sono stati riportati i grafici in quanto non si è rilevato nessun tipo di segnale in risposta, a conferma di quanto espresso dalla teoria, dal momento che la loro polarizzazione orizzontale è perpendicolare a quella dell’antenna e dunque in perfetto disadattamento con quest’ultima. Dopo aver ottenuto questi scadenti risultati che confermano il bisogno di un’antenna di tipo diverso, è stata presa la decisione di non analizzare le orientazioni laterali 5_L e 6_L, le quali dovrebbero in ogni caso fornire risultati simili rispettivamente alla 1_V e 3_H che si differenziano dalle laterali solo per una rotazione lungo l’asse principale del Tag.
Per l’orientazione 1_V a partire da un metro e per la 3_H dopo 30cm si notano perdite di segnale i punti ben precisi (multipath): questo comportamento e l’andamento generale delle curve sarà commentato una sola volta approfonditamente nei risultati con antenna in polarizzazione circolare, dal momento che le considerazioni saranno le stesse.
3.4.2 Risultati con antenna in polarizzazione circolare.
Tutte le misure sono state eseguite ad una potenza di 300mW in modo da essere sicuri di avere un comportamento in saturazione per i Tag nella maggior parte delle condizioni.
Parametri di valutazione delle curve. Sia per valutare la bontà di una curva, che per un
confronto reciproco, è necessario decidere quali siano i parametri da esaminare: per un utilizzo con algoritmi di localizzazione, l’andamento della caratteristica RSSI-distanza dovrebbe soddisfare, o avvicinarsi il più possibile, ai seguenti requisiti, mediante i quali saranno valutati tutti i risultati.
Andamento lineare: se la curva assomiglia ad una retta, l’andamento è uniforme e dunque l’accuratezza ottenibile non dipende dalla distanza a cui ci troviamo. E’ uno dei motivi per i quali i grafici che seguono sono tutti presentati con potenze in dBm ed asse delle distanze in scala logaritmica: in un caso ideale nel quale la potenza in scala lineare (ovvero l’RSSI in mW) avesse un decadimento del tipo “ 1/r 2” una
volta effettuata la conversione in logaritmico per entrambi gli assi, si vedrebbe esattamente una retta.
Funzione monotona decrescente (o più in generale, monotona): se così non fosse, a due distanze anche molto diverse potrebbe corrispondere uno stesso livello di potenza, creando ovvie ambiguità in distanza.
Ampia dinamica del segnale: per ogni spostamento in distanza la variazione corrispondente dell’RSSI ricevuto dovrebbe essere più grande possibile, in modo da ridurre la possibilità di confondere due punti a distanza vicina, o in altre parole, per aumentare l’accuratezza.
Potenza e distanze: il livello di potenza ricevuta ovviamente deve essere tale da permettere una lettura del dato più chiara possibile ed inoltre per renderlo maggiormente distinguibile dal rumore, questo deve valere almeno in un range in distanza intorno ad 1 metro per uno scenario di cassetto intelligente, o svariati metri per uno scenario diverso come una libreria RFID.
Effetto del multipath. L’aspetto più evidente presente in tutte le curve è un andamento
con oscillazioni periodiche del segnale il cui periodo, di circa pari a λ 2⁄ (λ=35cm), può essere valutato mediante l’immagine 3.25: sono presentate proprio le orientazioni 1_V e 2_V in quanto trattasi di due casi eterogenei per il fatto che il piano del terreno si trova, rispettivamente, ortogonale e parallelo all’antenna del Tag (riprenderemo questo discorso in seguito); l’asse delle distanze in questo caso è riportato in lineare per poter valutare al meglio il periodo. Il fenomeno ondulatorio è essenzialmente da attribuire al multipath e quindi al modo in cui i vettori dei vari raggi (uno diretto e vari riflessi) si sommano in ricezione: ne è conferma la periodicità, di valore simile a “λ 2⁄ ”.
Orientazione 1_V Orientazione 2_V
Altro fenomeno legato al multipath è il fatto che per certe distanze, periodiche con lo stesso periodo, si hanno dei nulli di segnale: in questi casi il multipath provoca una somma distruttiva dei vari raggi in posizioni particolari, si nota maggiormente nelle orientazioni 3_H e 6_L di figura 3.26
Orientazione 1_V Orientazione 5_L
Orientazione 2_V Orientazione 4_H
Orientazione 3_H Orientazione 6_L
Figura 3.26 – Confronto curve RSSI-Distanza per tutti i Tag in spazio libero.
Analisi al variare delle orientazioni (figura 3.26 a pagina precedente).
3_H e 6_L: dal momento che la polarizzazione dell’antenna è circolare, sono le
uniche orientazioni totalmente sfavorite: questo è confermato dai grafici nei quali si nota una totale discordanza dai parametri di valutazione ai quali ci stiamo riferendo: un andamento che approssima abbastanza bene una funzione lineare monotona e di potenza adeguata si apprezza solamente nei primi 30 centimetri, dopodiché si presentano fluttuazioni di grande intensità e numerosi nulli di segnale.
1_V e 5_L: le quattro orientazioni rimanenti sfruttano chiaramente il vantaggio della
polarizzazione circolare dell’antenna e le due verticali sono quelle che maggiormente si avvicinano agli standard di valutazione:
le oscillazioni dovute al multipath sono le più basse di tutti i grafici (non superano i 2,5dBm);
facendo una media delle curve intorno a tali fluttuazioni, da figura 3.26-1_V si intuisce un andamento lineare a tratti, in cui in tutti i casi la seconda retta che approssima la parte finale della curva ha una pendenza più accentuata delle precedente: per alcuni Tag, nei primissimi 10cm non si apprezzano variazioni significative del valori di RSSI, probabilmente a causa della eccessiva vicinanza alla sorgente.
il decadimento è quello che approssima meglio una funzione monotona decrescente (grazie anche alle basse oscillazioni) mentre, facendo una media per il comportamento di tutti i Tag a varie distanze, la variazione dell’RSSI registra livelli di quasi 10dBm ogni 40cm;
le curve mantengono le caratteristiche sopra descritte fino a circa un metro di distanza, pienamente sufficiente per un’implementazione per smart shelves in cassetti; questa considerazione non include il caso sfortunato Impinj Satellite, il quale si conferma un Tag progettato per lavorare a distanze inferiori a 30cm.
2_V e 4_H: i posizionamenti 2_V e 4_H mantengono caratteristiche molto simili
alle due orientazioni verticali, ma in ogni caso producono curve meno accurate delle precedenti essenzialmente a causa delle maggiori fluttuazioni (fino a valori di 4dBm). Le oscillazioni di più alto livello sono dovute all’interferenza del terreno che, per
un’antenna disposta in orizzontale si fa sentire maggiormente, come conferma la teoria delle antenne su piano di massa [7].
Analisi al variare del Tag (ancora figura 3.26, pag.113).
Impinj Satellite: come affermato più volte è il Tag dalle prestazioni decisamente più scadenti: sebbene possieda un andamento delle curve estremamente soddisfacenti per le quattro orientazioni migliori, con decadimento monotono, lineare ed assenza di fluttuazioni, purtroppo mantiene queste caratteristiche per distanze non superiori ai 30cm e sempre con potenza molto ridotta. Nelle orientazioni 3_H e 5_L addirittura non si riesce a ricevere alcun segnale.
Rafsec G2, Alien, UPM Raflatac: i tre Tag con antenna a dipolo semplice si comportano in maniera molto simile tra loro, come ci si poteva aspettare dalla loro parentela. Presentano oscillazioni leggermente inferiori a quelle del LAB-ID ma andamenti molto simili anche a quest’ultimo. Il Rafsec G2 può venire considerato il migliore dei tre in quanto, oltre a rispondere con livelli di potenza più alti, presenta anche un andamento leggermente meno fluttuante soprattutto per le due migliori orientazioni 1_V e 5_L.
Lab-ID UH414: le oscillazioni sono solo leggermente superiori ai casi precedenti, probabilmente a causa del maggior livello di potenza che è in grado di trasmettere. Proprio il livello di potenza è di fatto il maggior punto di forza di questo Tag dovuto essenzialmente al chip Impinj Monza 4. Nonostante ciò non riesce a raggiungere portate maggiori, che per tutti i quattro Tag si assesta intorno ad un metro, alla potenza di 300mW con antenna da 6,5dBi di guadagno. Infine, non si apprezza per questo Tag un livello superiore di insensibilità rispetto alle orientazioni, come invece dichiarato nel datasheet[50]: il comportamento al variare delle orientazioni è simile agli altri Tag con antenna a dipolo semplice.
3.5 Misure di RSSI nel cassetto
Ora che si iniziano ad avere valide informazioni riguardo al funzionamento del Reader, all’andamento del parametro RSSI in distanza, al comportamento dei Tag e delle orientazioni si può passare all'analisi dello scenario con il cassetto: in questa fase lo scopo è quello di valutare quali siano le differenze rispetto ai risultati ottenuti in spazio libero e soprattutto trarre delle linee guida per implementare nel migliore dei modi l’algoritmo di localizzazione k-Nearest Neighbor descritto nell’ultimo capitolo della tesi. Le prove si svolgeranno in base alle seguenti modalità, le quali sono state sviluppate tenendo conto di tutte le conoscenze acquisite nello scenario precedente:
lo scenario è quello descritto in 3.1 e rappresentato nelle figure 3.28 (vedi in seguito); il cassetto utilizzato è di legno e le dimensioni sono di 15 x 80 x 40 cm3 (H x W x D);
la potenza in trasmissione è stata fissata a 300mW per i motivi già discussi in spazio libero;
le orientazioni sono state scelte basandosi sui risultati ottenuti nello scenario in spazio libero, per i quali è presentato un riepilogo in figura 3.27.
Si effettueranno le analisi per le orientazioni 1_V, 5_L, 3_H e 4_H. Le prime due sono state scelte per ovvi motivi prestazionali, la 4_H fornisce risultati non comparabili alle prime ma comunque molto buoni e preferibili anche alla 2_V la quale, rispetto alla 4_H, presenta oscillazioni in potenza a livelli leggermente superiori ed una funzione decrescente in maniera meno netta con la distanza. Infine è stata selezionata anche l’orientazione 3_H per mantenere un riferimento di caso peggiore nei risultati che si otterranno.
I modelli di Tag che si prendono in considerazione sono solamente due dei cinque selezionati precedentemente: uno è il Tag UPM Raflatac Rafsec G2 il quale avendo in comune con altri due modelli lo stesso design dell’antenna a dipolo semplice ed anche le prestazioni, ne rappresenta appunto la categoria; l'altro è il Lab-ID che è invece un modello leggermente diverso dai precedenti, in quanto è ancora un dipolo ma di tipo ripiegato, risultando quindi di dimensioni più compatte seppur con prestazioni in termini di risposta di RSSI molto buone. Infine viene scartato il Tag Impnj Satellite a causa della scarsa portata (inferiore ai 40cm).
Sono state eseguite misure di RSSI al variare della distanza sia in direzione del lato lungo del cassetto (da 3cm a 78cm) che del lato corto (da 3cm a 39cm): in generale (non sempre) le misure sono state ripetute per diversi posizionamenti rispetto all’altro lato, in modo da acquisire delle "griglie" di valori in entrambe le dimensioni. Lo step in distanza è stato ridotto a 3cm rispetto alle misure di spazio libero per aumentare leggermente la risoluzione in modo da visualizzare meglio soprattutto gli andamenti oscillatori dovuti al multipath: essendo la lunghezza d’onda di circa 35cm, uno step di oltre dieci volte inferiore è sicuramente sufficiente per cogliere eventuali sfumature dell’andamento.
Il posizionamento dell’antenna è un aspetto che fa parte dei parametri fondamentali da definire per l’implementazione del cassetto intelligente; saranno presi in considerazione tre possibili posizionamenti dell’antenna Reader rispetto al cassetto (vedi figura 3.28 a pagina seguente):
antenna centrata sul lato corto in orientazione ortogonale al piano del cassetto;
antenna sul lato lungo in orientazione ortogonale al piano del cassetto, in posizione asimmetrica (centrata a 63cm dall’inizio del cassetto). Questa posizione in particolare è stata disposta asimmetricamente per evitare possibili ambiguità che potrebbero verificarsi quando un Tag posto alla sinistra dell’antenna ed un altro alla destra e alla stessa distanza relativa, rispondano con livelli di RSSI molto simili;
antenna sotto il cassetto, in orientazione parallela al piano del cassetto e centrata rispetto ad entrambi i lati.
Si tenga presente che le orientazioni dei Tag discusse in precedenza sono riferite all’antenna (e non al cassetto), come mostrato appunto in figura 3.28.
Per quanto riguarda il tipo di antenna utilizzata, dopo aver interpretato i risultati in spazio libero ci siamo orientati esclusivamente sul modello in polarizzazione circolare.
(a) (b)
(c)
Figura 3.28 – Tre posizionamenti dell’antenna rispetto al cassetto: lato corto (a), lato
lungo (b), sotto(c). Orientazioni dei Tag rispetto all’antenna, da sinistra verso destra all’interno dell’ellisse: 1_V, 5_L, 4_H, 3_H
Presentazione dei risultati. Si riporteranno solamente i grafici più significativi, in quanto le informazioni risultano abbondantemente ridondanti: i grafici non riportati, se necessario, saranno comunque commentati adeguatamente.
In particolare, per quanto riguarda la presentazione dei risultati associati a Tag differenti, inizialmente (scenario con antenna posizionata sul lato corto) verranno visualizzati per completezza sia per il Rafsec G2 che anche per il Lab-ID; successivamente si proseguirà riportando solamente i grafici relativi al Tag Rafsec G2, tenendo presente che le informazioni deducibili dal Tag LAB-ID risultano essere le stesse (ci concentriamo proprio sui risultati del Tag Rafsec G2 in quanto è questo il modello scelto che verrà utilizzato nel successivo capitolo per l’implementazione dell’algoritmo di localizzazione nel cassetto).
3.5.1 Antenna sul lato corto
In figura 3.29 si riporta il set-up di misura comprensivo dei riferimenti cartesiani utilizzati per i due lati del cassetto. E’stata acquisita un’unica curva RSSI rispetto alla distanza in direzione del lato lungo, la quale è stata anche confrontata con i risultati ottenuti in spazio libero; in direzione del lato corto sono state invece rilevate tre curve a tre diverse distanze dall’antenna.
Figura 3.29 – Set-up di misura con antenna sul lato corto e assi di riferimento Risultati delle misure di RSSI in direzione del lato lungo e confronto con spazio libero. In figura 3.30 (pagina seguente) si riporta la direzione di spostamento, che risulta
orientazioni (1_V, 5_L, 4_H, 3_H) e nelle figure successive si presentano alcuni dei risultati di queste acquisizioni e del loro confronto con spazio libero, andando ad analizzare le orientazioni individualmente.
Figura 3.30– Misure di RSSI in direzione del lato lungo per quattro orientazioni dei Tag Orientazioni 1_V e 5_L. Figura 3.31: fino a circa 50cm non si notano variazioni
apprezzabili rispetto alle misure in spazio libero, le differenze tra le due curve si mantengono intorno a 1÷2dBm (leggermente superiori per il Tag Lab-ID) e tale scarto come già notato più volte è ininfluente in quanto comparabile all’oscillazione intrinseca del parametro RSSI discussa in precedenza.
(a) (b)
(c) (d)
Figura 3.31 – Confronto spazio libero: Rafsec orientazione 1_V (a); Rafsec
Passati i primi 50cm invece si rileva in tutti i quattro grafici un brusco calo della potenza ricevuta (nell’ordine di circa 5dBm per entrambi i Tag) ed un netto peggioramento delle oscillazioni le quali mantengono comunque la stessa periodicità nel tempo e sono dunque ancora causate dal fenomeno del multipath, che evidentemente in presenza del cassetto procura un maggior livello di interferenza. Infine si apprende che la miglior risoluzione nel cassetto dovuta alla riduzione dello step a 3cm non aggiunge informazioni rilevanti.
Orientazione 4_H. Figura 3.32: dalle misure preliminari e dalla teoria delle
antenne si era appreso che i Tag nelle orientazioni orizzontali presentano fluttuazioni maggiori a causa della maggior interferenza procurata dal terreno: in presenza del cassetto questo fenomeno scompare e si ha un netto miglioramento della caratteristica in tutto il dominio, soprattutto dopo i 50 cm, dove le oscillazioni dovute al multipath tendono a ridursi da 3÷4dBm fino a valori scarsamente rilevabili. L’effetto è ancora causato dal multipath che in questa configurazione si somma al segnale in maniera costruttiva, per via del maggior numero di raggi riflessi presenti nel nuovo scenario.
(a) (b)
Figura 3.32 – Confronto spazio libero, orientazione 4_H:
Orientazione 3_H. Non si riportano i grafici del caso peggiore, dai quali si
riscontra un andamento pressoché invariato dallo spazio libero, fino a circa 30cm, dopodiché la ricezione cala sotto ai livelli rilevabili dal Reader, in quanto non si presentano più le oscillazioni che erano visibili in spazio libero a distanze maggiori.
Risultati delle misure di RSSI in direzione del lato corto. In questo caso i due Tag
"scorrono" parallelamente all’antenna (vedi figura 3.33): questo sta a significare che le curve che verranno acquisite, le quali sono ora a distanza fissa, caratterizzeranno l’andamento della distribuzione di campo vicino dell’antenna stessa, piuttosto che la caratteristica in distanza del caso precedente.
Figura 3.33 – Misure di RSSI in direzione del lato corto per tre distanze dall’antenna.
Per questo motivo inoltre i grafici verranno presentati in scala lineare sull'asse delle ascisse; sono state eseguite prove a tre distanze dall’antenna, vale a dire per 21, 42 e 63cm dall’inizio del cassetto. I grafici sono quelli di figura 3.34 e 3.35 (si riportano solo quelli relativi al Rafsec G2).
(a) (b)
Figura 3.34 – Misure RSSI per il lato corto, tre distanze dall’antenna (21,42,63cm);
(a) (b)
Figura 3.35 – Misure RSSI per il lato corto, tre distanze dall’antenna (21,42,63cm);
Tag rappresentato: Rafsec G2; Orientazioni: 3_H (a), 4_H (b)
Dai grafici riportati si verifica che la distanza di acquisizione delle tre curve (separate l’una dall’altra di 21cm) provoca variazioni apprezzabili nei livelli di RSSI ricevuti i quali mediamente si discostano di circa 5dBm al centro del lato corto (come previsto anche dalle precedenti misure sul lato lungo). Non sembra in ogni caso possibile riuscire a sfruttare con successo queste caratteristiche in un algoritmo di localizzazione, in quanto l’andamento delle curve è totalmente insoddisfacente per i seguenti motivi: l’andamento dell’RSSI mentre il Tag si sposta lungo il lato corto rimane quasi
costante, soprattutto (ma non solo) per l’orientazione 4_H;
Nelle orientazioni 1_V e 5_L alla distanza di 21cm si notano, seppur molto approssimati, degli andamenti a campana che dovrebbero ricordare la forma del diagramma di irradiazione dell’antenna e che producono variazioni dell’RSSI di circa 5dBm per 20cm di spostamento sul lato corto: tale caratteristica sarebbe apprezzabile per la localizzazione, se non fosse che purtroppo tali curve tendono ad appiattirsi nelle caratteristiche acquisite a 42cm ed addirittura ad invertire la curvatura per i dati a 63cm dall’antenna. Questo causa tra l’altro la sovrapposizione dei tre andamenti in prossimità dei bordi del cassetto.
Per l’orientazione 3_H i risultati confermano l’impossibilità di un utilizzo di tale orientazione (come anche la 6_L) in alcun algoritmo per ovvi motivi chiaramente visibili in figura 3.35-a.
E’ stato confermato ed è giusto chiarire ora che, nonostante lo spostamento in direzione ortogonale alla direzione di massima irradiazione dell’antenna, da queste curve non potevamo attenderci un andamento che approssimasse il diagramma di irradiazione dell’antenna, in quanto tale diagramma è un parametro definito in campo lontano[7]: nella regione di campo vicino in cui si trova interamente il cassetto, il comportamento dell’antenna subisce delle alterazioni che ne cambiano i parametri di direttività in maniera piuttosto imprevedibile, come discusso in precedenza, si ricordi figura 3.1.
3.5.2 Antenna sul lato lungo
Come mostra la figura 3.36 per la prima volta è stata modificata la posizione dell’antenna, la quale si trova adesso sul lato lungo del cassetto, a 63cm dall’inizio; il collocamento asimmetrico è stato pensato per distinguere i segnali ricevuti dalla destra o dalla sinistra dell’antenna: per una ipotetica dislocazione centrale e supponendo un certo grado di simmetria del fascio d’antenna, sarebbe prevedibile incorrere in un’ambiguità destra/sinistra quando si associ l’RSSI ricevuto ad un valore di distanza, in quanto ci sarebbero sempre due posizioni simmetriche a pari distanza dall’antenna. Per quanto riguarda le misure in direzione del lato lungo del cassetto, sono state acquisite due curve, mentre per il lato corto tre curve, il tutto per i due Tag e le quattro orientazioni selezionate.
Risultati delle misure di RSSI in direzione del lato lungo. Sono state eseguite misure
di RSSI da 0cm ad 80cm in direzione del lato lungo e dunque per uno spostamento dei Tag parallelo al piano dell’antenna (figura 3.37): come già esplicitato nella fase precedente si tratta quindi di misure della distribuzione del campo elettromagnetico nelle immediate vicinanze dell'antenna, il tutto per due distanze dall’antenna, 12cm e 21cm.
Figura 3.37 – Misure di RSSI in direzione del lato lungo, per due distanze dall’antenna. Orientazioni 1_V e 5_L: i risultati sono mostrati in figura 3.38 per il Tag Rafsec G2, in
ogni caso il comportamento dell’altro modello (UH414) nelle orientazioni migliori è molto simile: come si vede in figura 3.38 è possibile una discriminazione delle due curve acquisite a diversa distanza solamente in prossimità dell’antenna, dove sono presenti differenze di oltre 5dBm per uno scostamento di 9cm delle curve; allontanandosi dall’antenna verso l’inizio del cassetto le curve tendono a sovrapporsi, inoltre presentano dei nulli che non permettono di ricoprire tutta la lunghezza del cassetto in modo uniforme.
(a) (b)
Figura 3.38 – Misure RSSI per il lato lungo, due distanze dall’antenna (12, 21cm), Tag
Una buona approssimazione di funzione lineare monotona decrescente e priva di oscillazioni dovute al multipath è presente solamente da 30 a 60cm circa, dove tra l’altro il decadimento delle curve si presenta in modo molto marcato: 8÷15dBm per il Rafsec e 10÷20dBm per il Lab-ID (non mostrato) in soli 30cm . In conclusione, le misure non riportano risultati incoraggianti dal momento che i parametri mediante i quali vengono valutate le curve forniscono risultati molto buoni solamente in quella piccola regione larga appena 30 centimetri, insufficiente dunque per un possibile algoritmo di localizzazione nel cassetto.
Orientazioni 3_H e 4_H: i grafici sono presentati ancora per il solo Tag Rafsec G2 in
figura 3.39, dove si nota che per l’orientazione 3_H si confermano di nuovo le prestazioni peggiori con capacità di lettura dei Tag praticamente assente in tutta la lunghezza del cassetto;
(a) (b)
Figura 3.39 – Misure RSSI per il lato lungo, due distanze dall’antenna (12, 21cm), Tag
Rafsec: Orientazioni 3_H (a), 4_H (b)
anche la posizione 4_H però in queste misure ha riportato scarsissime prestazioni allontanandosi dall’antenna: questo risultato a prima vista inaspettato, può spiegarsi per il fatto che durante lo spostamento in direzione parallela, ad un certo punto il diagramma
di irradiazione del Tag tenderà a presentare un nullo proprio in direzione dell’antenna; il fenomeno è schematizzato in figura 3.40.
Figura 3.40 – Problemi dell’orientazione 4_H per un allontanamento parallelo
all’antenna
Risultati delle misure di RSSI in direzione del lato corto. In questo caso, vedi figura
3.41, i due Tag si spostano da 0cm a 40cm sul lato corto, in direzione perpendicolare, caratterizzando dunque misure di RSSI in distanza dall’antenna. Il tutto per tre diverse posizioni rispetto al lato lungo: 21cm, 42cm e 63cm.
Orientazioni 1_V e 5_L: si veda figura 3.42 in cui le tre curve risultano ampiamente
separate in potenza da svariati dBm. Ciò era prevedibile grazie alle misure ottenute sull’altro lato a queste tre particolari distanze. Purtroppo l’andamento delle curve a 21 e 42cm mostra un RSSI pressoché costante per tutta la lunghezza del lato corto: solamente in prossimità dell’antenna (curve verdi a 63cm) e solamente da 20 a 40cm sul lato corto si nota un andamento decrescente delle curve, ma in ogni caso non si rispecchiano buoni andamenti in base ai parametri di valutazione ricercati per tutta la lunghezza del cassetto.
(a) (b)
Figura 3.42 – Misure RSSI per il lato corto, tre posizioni (21,42,63cm dall’inizio del
cassetto); Tag Rafsec. Orientazioni 1_V (a), Rafsec 5_L (b)
Orientazioni 3_H e 4_H: l’orientazione 3_H (figura 3.43) friporta un segnale non nullo
solamente in una ristretta zona nell’intorno dell’antenna Reader mentre per l’orientazione 4_H valgono le stesse considerazioni appena fatte per le altre, ad esclusione della curva più distante dall’antenna (21cm) che non è stata rilevata sempre a causa del nullo di tale orientazione in direzione dell’asse del Tag (figura 3.40, pag. 127).
(c) (d)
Figura 3.43 – Misure RSSI per il lato corto, tre posizioni (21,42,63cm dall’inizio del