Chapter 1
The walk
1.1 Description of the walk
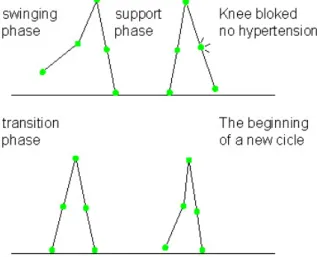
By considering that both legs completely similar, it can be supposed that the walking process is based on a cycle. The hypothesis is acceptable regarding the biomechanical measurements. This cycle is illustrated on the picture 1.1.
Figure 1.1: Cycle of the gait
The starting point will be with both legs on the ground. The front foot, which has just hit the ground, and the other with a velocity away from the floor. The swing leg will then bend, while the leg in stance will rotate around the foot. The bending process will enable the swing leg to go before the other one. The next step is when the shin catches up the thigh of the bent leg. The knee will now block the shin to prevent the hyperextension of the leg, or in other words to prevent it from having the angle shin-thigh higher than 180°, which is not biologically acceptable. Both legs are now in stance. The free leg will then hit the ground. Both legs are again on the ground.
Then there is the beginning of a new cycle.
1.2 First models of walker
The goal of the first studies was to obtain a human like gait for robots. In the past few decades some companies did achieved to build walking bipeds. However there were still issues about efficiency. The robots did indeed need a lot of energy to maintain this walking process. For instance, Honda Motor Co. [1] made an autonomous walker that had to support 20 kg of batteries for only 15 minutes of walk. The first to consider the mechanical behaviour of the gait were McMahon and Mochon [2]. They proved that the motion of the swing leg was just the result of the gravity acting on a double pendulum. They did also introduced the term of ballistic to insist on the movement without supply of energy. The idea of McMahon and Mochon was then extended by McGeer [3]. He proved that not only the motion of the swing leg was the results of just the gravity but the whole walking process. He introduced thus the term of passive
dynamic walking.
The model was constructed under some hypothesis:
_ The gait will be considered as a bi-dimensional process. The gait is actually a three dimensional process. However the bi-dimensional approximation will enable to get a realistic approach of the gait.
_ The model does consider only two legs with thigh and shin, no upper body.
_ The legs are modelled by rigid bars, linked with the other by hinges.
_No friction is considered.
_Both legs are similar.
_ The body is not controlled, and no energy is supplied. However, to compensate the loss of energy at each “heel strike”, some gravitational energy will be given back, in considering the model will descend a small slope.
_ Contact and shock with the ground are supposed to be fully inelastic.
The gait obtained with the previously presented hypothesis is more or less the one presented in the chapter 5. The transition phase, when both feet are touching the ground is instantaneous. The equilibrium position is not considered. The possibility of a second step can be evaluate by the possible correlation between the initial conditions and the initial ones (speed as well as position, mostly angles). Indeed, the closest the final velocities are from the initial ones, the closest the next step is from success.
1.3 Current research
The base of all the model is still the model of McGeer, presented above. Some parameters did change, and some improvement have also been proposed. Some information about Bi-dimensional, Three-dimensional models and the contribute of muscle will be introduced in this paragraph.
Bi-dimension models
_ Stability
New models of walker have been proposed since the model McGeer. Most of them tend to improve the capability of the simulation to obtain a stable gait. The gait is indeed really sensitive to the initial conditions, as demonstrate in the[6]. This is why lots of paper did propose solutions to predict the state of the system at the next step. The idea is that it is possible to find a function S linking the initial conditions of a step
n to the conditions after the step n + 1. Finding the next point of the function, will
_ The foot
Other investigations tend to improve the model of the foot. In the McGeer model the feet were only circles. The leg could thus turn around the foot without giving up to much energy, even if the heel strike will dissipate some. However some new models are currently developed. The goal is still to minimize the energy loss during the contact foot-ground, and especially the shock. The design of the foot is thus investigate. It appears however that the curved foot prosthesis, enable better gait, even if they also are less human-like.
Three-dimensional models
More complex models will obviously try to integrate the three dimension process in their calculus. The issues are however bigger that what it first seems, and can be sorted in two main categories.
_ The size of the system.
There will be indeed a number of degree of freedom that is much bigger than that ones of 2D. A point was defined by three coordinates (2 of position, 1 of angle), but in three dimensions six will be required. The size of the matrix will thus double and the resolution time may explode.
_ Some movement appears.
The straight walk will not be obvious as it was with the 2D model. It is necessary indeed to face some issues about rotation about the axe orthogonal to the ground and the rotation around the axe of the walk. The last possible rotation is the most problematic one for biped walk. Indeed, each time one leg will bear the body, it will support the weight of the whole system. However the mass is concentrated between the two legs, the leg can thus be considered as inverted pendulum in two directions with the mass not centered on the leg.
Muscles and tendons
Some models tend to integrate in their calculus the forces and the joint that can be physically observed on human bodies. This is a way to supply energy to the model and thus to sustain the walk ability. Nevertheless the results given by such simulation are still not reliable enough. Some model consider also the muscles but in a passive way. They are not activated, on the contrary they are source of dissipation, and thus modelled by a bar with a stiffness and a damping [4].
1.4. Application fields
Robots
The understanding of the walking process enable to build robots that can use the cycle, and constraint defined by the previous studies. However most walking robots don't use the ballistic walk, this means that they need a big amount of technology to control the walking process. Sensors must be placed on each major elements, and obviously actuators also. The gait must be controlled by a central processing chip. This electronic requires lots of energy. It is possible also to see that the 3D walking process implies some movement, that cannot be allowed. The two rotations, that have been previously presented, must be disabled. Two main solutions have been found to solve that issue.
The first one is a special pelvis that can compensate for this two solid movement [5]. The other one is to model also the upper body, and to use the arms as counterweight [6, 7]. They will swing in opposition to the legs and thus maintain some balance.
Prosthesis
Even if the robotics development generates a big market and huge potential benefits, all applications of the understanding of walking process are not turned towards automates. Having a good simulation of the gait enables the builder of prosthesis to master a tool to improve their products. This improvement is conducted through the change of some data during the simulations. The numerical model can make this
experiments really cheap, as long as the numerical model has been validated as having the same behaviour as the physical one.