Capitolo 4
Hardware
4.1 Introduzione
Il sistema di sospensioni intelligenti progettato è stato pensato per uno scooter dotato di una rete CAN.
Vista la disponibilità presso il laboratorio in cui la parte operativa della tesi è stata svolta di un lavoro relativo al progetto di una rete basata su questo protocollo, l’hardware di base è stato sfruttato. È stato poi aggiunto qualche elemento necessario, e la caratterizzazione del nodo è stata effettuata a livello firmware.
Nei paragrafi seguenti viene data una descrizione del nodo generico, anche perché il nodo è stato pensato proprio per consentire di adattarlo alla diversa zona dello scooter da gestire [1].
4.2 Architettura della rete
La rete è attualmente costituita da quattro nodi, ognuno dei quali è dedicato al controllo di una zona dello scooter.
I quattro nodi sono collegati tra di loro tramite un cavo bifilare intrecciato con alle estremità due resistenze da 120 Ω, come previsto dal protocollo, per costituire una rete del tipo mostrato in figura 4.1.
Figura 4.1: architettura della rete attuale
Attualmente i nodi sono dislocati nelle aree: • Zona anteriore bassa;
• Zona cruscotto; • Zona sella;
4.3 Architettura del nodo
Ogni nodo preleva le informazioni che arrivano dai sensori e i messaggi che arrivano dalla rete, elabora i dati e produce dei segnali di uscita per i dispositivi che controlla. Inoltre si occupa di trasmettere il messaggio nella rete.
Uno schema a blocchi del nodo è mostrato in figura 4.2.
Figura 4.2: architettura del nodo
L’Input Interface si occupa del condizionamento dei segnali, permettendo così al microcontrollore di leggere i dati.
I blocchi Power e Digital Output sono quelli dedicati all’attuazione dei comandi ed al controllo di alcune periferiche, come accensione delle luci, claxon, elettroventola, accensione delle spie.
Su ogni nodo è presente un Can Driver per il collegamento al bus e infine un’interfaccia UART con standard RS232 utile nella fase di sviluppo e debugging del firmware.
L’utilizzo di un bus CAN consente inoltre la programmazione del microcontrollore direttamente sulla scheda. Questa è una funzionalità molto importante, soprattutto in relazione al fatto di avere al momento a disposizione solo caratteristiche approssimative dell’attuatore meccanico. Eventuali modifiche possono essere facilmente implementate.
In figura 4.3 è riportato lo schema a blocchi del microcontrollore utilizzato.
Figura 4.3: schema a blocchi del microcontrollore usato
Si tratta del T89C51CC01 della ATMEL [13]. È un microcontrollore a 8 bits capace di supportare il protocollo CAN, dotato di 32 linee di I/O, 3 timers, una UART, 4 moduli PCA e 32 KB di memoria flash.
In particolare, rispetto ai nodi originali della rete, è stato ad esempio utilizzato il convertitore ADC.
Questo è un convertitore che può funzionare nelle modalità a 8 o a 10 bits. Nel funzionamento a 10 bits esegue conversioni di precisione, ma richiede una gestione in cui il nodo deve essere messo in stand-by.
Si è quindi preferito utilizzare la conversione a 8 bits, tra l’altro sufficiente visto il non elevato numero di tipologie di strada preso in considerazione.
4.4 Collegamenti previsti
Per il funzionamento del sistema è necessario acquisire l’informazione proveniente dalla strada per poterla gestire. Il circuito con cui acquisire il segnale è mostrato in figura 4.5.
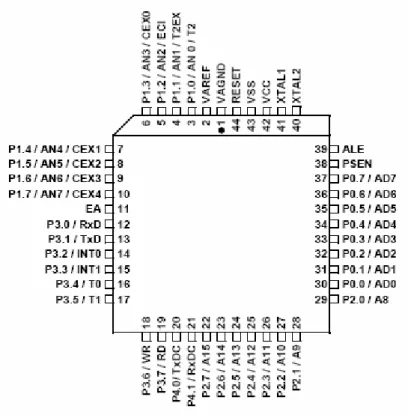
Con riferimento alla figura 4.4 che riporta la piedinatura del microcontrollore, gli ingressi sfruttati sono il P1.1 per l’accelerazione e il P1.2 per la variabile “assetto” impostata dal pilota.
Figura 4.4: configurazione PIN del microcontrollore
Sul mozzo anteriore deve essere montato un accelerometro assiale.
È stato scelto un accelerometro della Analog Device, in particolare il modello ADXL 150 [15].
Questo sensore risulta essere adatto per il range di accelerazioni previste e presenta costi contenuti essendo realizzato in tecnologia MEMS.
Da studi condotti in precedenza, l’accelerazione massima prevista dovrebbe essere poco inferiore ai 20 g in condizioni di percorrenza su ciottolato. Il modello di accelerometro scelto misura accelerazioni fino a 50 g. Richiede un’alimentazione pari a 4 V facilmente ottenibile sul nodo, e presenta una sensibilità pari a 38 mV /g.
Considerando 20 g di accelerazione massima, il sensore potrebbe dare in uscita 0,76 V. Per questo si è ritenuto opportuno amplificare il segnale di un fattore pari a 3,5.
Per evitare la lettura di segnali non previsti che possano danneggiare il convertitore che ha una dinamica di ingresso pari a 3 V, nel determinare l’amplificazione del blocco inserito subito dopo l’accelerometro è stata considerata una dinamica di 2,6 V.
Il segnale così ottenuto viene mandato a un rivelatore di inviluppo e infine è stato posto un buffer per avere un’uscita a bassa impedenza. Questo è il segnale che viene collegato al piedino P1.1.
Il pilota può scegliere la tipologia sport o comfort mediante un semplice tasto, imponendo il valore alla variabile assetto.
Il microcontrollore legge questo ingresso sul piedino P1.2.
L’uscita PWM che deve andare a pilotare l’attuatore meccanico è prelevata dal piedino CEX4.
È stato utilizzato un rivelatore d’inviluppo in quanto il sistema non deve adattarsi alla singola asperità stradale, ma deve riconoscere la tipologia di strada che si sta percorrendo. Dovendo effettuare la scelta in base all’ampiezza dell’accelerazione proveniente dalla strada, l’informazione prelevata dal rivelatore di inviluppo è risultata sufficiente.
4.5 Ranges di accelerazione riconosciuti dal sistema
Come è possibile leggere in tabella 3.7, i ranges di accelerazione associati a ciascuna tipologia di strada non hanno ampiezze uguali. Tali valori, seppure orientativi, hanno fornito i criteri di progetto del sistema. Nel paragrafo 5.4.4 è descritta la funzione del firmware che esegue la scelta tra le varie tipologie di strada. In tabella 4.1 vengono riportati i valori di accelerazione associati ai diversi casi.
Tipologia di strada Range di accelerazione associato[g]
Asfalto liscio 0-2,33
Pavè leggero 2.34-7
Pavè pesante 7,1-11
Ciottolato 11,1-20
L’ultimo intervallo potrebbe sembrare elevato. In realtà occorre considerare che la massima accelerazione attesa si attesta intorno ai
16-17 g. I 20 g riportati in tabella fanno riferimento alla massima accelerazione sopportabile dal sistema.