CAPITOLO 3
DESCRIZIONE DELLA CATENA DIFFERENZIALE DI LETTURA E
PROGETTO DEL FILTRO Gm-C
-
Introduzione
In questo capitolo, introduciamo da prima una descrizione analitica del funzionamento dell’amplificatore chopper, definendone, soprattutto le prerogative in termini di rumore introdotto sul segnale ed i limiti di funzionamento, per passare poi al progetto del sistema di filtraggio a valle, che necessariamente dovrà “accordarsi” sui vincoli di funzionamento introdotti dal chopper.
Dal momento che il flussimetro realizzato è per piccole portate, i segnali in tensione dalle termocoppie sono dell’ordine dei µV . Conseguentemente, nel progetto della catena differenziale di lettura è stato necessario curare con attenzione gli aspetti relativi al rumore introdotto sul segnale. L’amplificatore differenziale di misura, sviluppato in precedenti lavori di Tesi, comporterà un contributo di rumore che verrà preso come vincolo di riferimento per definire il massimo contributo di rumore che possa essere apportato dal filtro. Ciò ha portato alla necessità di definire un’opportuna modalità di confronto tra chopper e filtro in termini di rumore. I vincoli sulla massima DSP di rumore introducibile da ogni blocco circuitale, impone dei vincoli sul dimensionamento dei MOS che lo compongono.
-Analisi di rumore per il chopper
Consideriamo il generico dispositivo PMOS con il solo generatore di corrente di rumore “source-drain”:
Figura 1
2 1 3 8 p F p nI gm f WL N KTgm S = +
Hz A2 Dove:
N
F=
1
.
5
×
10
9[
V
2( m
µ
)
2]
.Considerando il source a massa per le variazioni, si può scrivere:
GS P DS
gm
V
i
=
Dove l’espressione della transconduttanza gmP, risulta: ) ( GS tp P
P V V
gm ≅
β
−Quello che si fa per motivi di confronto è riferire il rumore in ingresso. In questo modo, possiamo considerare lo schema con generatore di rumore di tensione equivalente di ingresso:
Figura 2
Quindi, possiamo scrivere:
v nI gm S
S = 2
Dove S è la DSP di rumore di tensione equivalente riferita in ingresso. Conseguentemente, vale: v
gm KT f WL N S F v 1 3 8 1 + =
che dimensionalmente risulta in
Hz
V
2 .Sviluppate queste considerazioni possiamo a questo punto determinare il rumore riferito all’ingresso nei buffer dell’amplificatore chopper (infatti, questa è la componente più significativa del rumore complessivo) ed introdurre i criteri di progettazione con vincoli di rumore.
Le correnti di rumore che devono essere considerate per i buffer di ingresso dell’amplificatore chopper, sono le due correnti relative alla coppia d’ingresso e le due correnti relative allo specchio di carico. Infatti, la corrente di rumore del circuito di polarizzazione non influisce in quanto in una
configurazione esattamente bilanciata, essa si ripartisce nella stessa maniera sui due rami del circuito sottraendosi in uscita. Applicando il teorema di Norton al nodo di uscita, possiamo scrivere:
4 3 2 1 ,out n n n n n
i
i
i
i
i
=
+
+
+
A livello di densità spettrale di corrente di rumore di uscita, si ha:
3 1 4 3 2 1 ,out i i i i 2 i 2 i i S S S S S S S = + + + = +
Dove il primo termine è relativo alla densità spettrale di rumore introdotta dagli NMOS, mentre il secondo è relativo alla densità spettrale di rumore introdotta dai PMOS.
La tensione di rumore di uscita si può esprimere come:
out out n out n
i
R
V
,=
,⋅
Il guadagno dello stadio differenziale semplice a carichi attivi, risulta:
out p R
gm
A0 = ⋅
La tensione di rumore riferita all’ingresso (RTI) conseguentemente risulta:
P out n out n ni
gm
i
A
V
V
, 0 ,=
=
Allora, possiamo determinare la Svni :
(
1 3)
22
i i P vniS
S
gm
S
=
+
La quantità ottenuta può essere scomposta in due contributi a sommare, il contributo termico ed il contributo Flicker: T vni F vni vni
S
S
S
=
+
Per semplicità, consideriamo uguali tutti gli NMOS e tutti i PMOS dello schema. L’ espressione dei contributi Flicker e termico (riportati in ingresso) risulta:
f WL WL N N gm gm WL N f gm gm WL N WL N S n p Fp Fn p n p F p n n Fn p Fp F vni p 1 ] ) ( ) ( ) ( 1 [ ) ( 2 1 ) ) ( ) ( ( 2 2 2 2 ⋅ ⋅ ⋅ + ⋅ = ⋅ ⋅ + = ] 1 [ 1 3 16 p n p Th vni gm gm gm KT S = ⋅ +
Nell’espressione del rumore termico possiamo riconoscere il fattore di rumore relativo alla sola coppia differenziale di ingresso presa a se:
p gm KT 1 3 16 ⋅ Il fattore peggiorativo [1 ] p n gm gm
+ dipende dal contributo dei dispositivi dello specchio di carico di tipo n. Considerazioni analoghe possono essere svolte per il rumore Flicker. Quindi il rapporto
p n
gm
gm
influenza l’espressione di rumore e conseguentemente questo può essere assunto come un parametro di regolazione a disposizione del progettista. Abbiamo già detto che in generale l’espressione del gm vale:
gm
=
β
⋅
(
V
GS−
V
t)
. Considerando cheβD t GS I V V − = 2 , possiamo ricavare l’espressione: ) ( 2 t GS D V V I gm − = da cui si può scrivere:
n t GS P t GS p n V V V V gm gm ) ( ) ( − − =
Quindi, nel definire il punto di riposo dei MOS (a mezzo del dimensionamento) si modificano anche le caratteristiche di rumore riportato all’ingresso. In ogni caso, osserviamo che per una riduzione significativa del rumore (1)
f non c’è altro modo se non quello di aumentare le aree dei
transistori. Ad esempio, per un’applicazione a frequenza inferiore della frequenza di “corner” si ricade in “zona Flicker” e conseguentemente, per diminuire il rumore RTI del sistema si può procedere aumentando (a parità del punto di riposo) le aree di quei MOS che incidono di più sulla DSP del disturbo. I parametri di intervento definiscono allora uno spazio di progetto in cui il miglioramento di alcuni aspetti comporta il peggioramento di altri e viceversa. Occorrerà un opportuno compromesso a seconda delle specifiche da conseguire.
- Rumore RTI dell’amplificatore chopper nel suo complesso
Consideriamo il sistema chopper nel suo complesso, per calcolarne il rumore RTI. Possiamo indicare i generatori di rumore RTI relativi ai buffer come
v
nb1,2. La tensione di rumore che abbiamo in uscita risulta:) ( ) ( 1 2 2 3 4 5 6 1 2 1 2 ,n nb nb R R od v v R in in in in in in R R v = ⋅ + + ⋅ + + + + +
Si osserva che il rumore prodotto sull’uscita dai transistori
M
7,8,9,10 è trascurabile poiché questi sono MOS in configurazione a gate comune. Le correnti di rumorein
R1 R, 2 sono rispettivamente prodotte dai resistori R1,R2. Passiamo alle DSP e dividiamo per il guadagno dell’amplificatore al quadrato. In questo modo si ricava la DSP di rumore riportata in ingresso (Sni). + + + ⋅ ⋅ + = 2 1 1 5 2 1 2 5 3 2 1 2 3 2 1 1 ) 4 1 ( 2 2 R R KTR S gm gm S gm gm R gm S Sni vb v v
Osserviamo tre contributi distinti al rumore: il contributo dei due buffer di ingresso, il contributo della sezione “folded cascode” di uscita (M3,4,5,6) (con le due componenti termico e Flicker), il contributo di rumore termico delle resistenze R1ed R2 (praticamente pari a 4KTR1, contributo della sola R1, se l’amplificazione è elevata). M1 ed M2 non contribuiscono alla
S
ni, infatti facendo riferimento alla figura 3, se si consideraV
i1 nullo, l’effetto è quello che viene riportata una massa virtuale sul nodo di source. Conseguentemente i segnali di rumore in corrente “vedranno” una bassa impedenza verso il source e verranno riprodotti sul drain. Come si vede dalla figura 4, procedendo con lo sdoppiamento equivalente del generatore di rumore, la corrente si richiuderà a “loop” su M1, non giungendo sulla resistenza di uscita. Al contrario la corrente di rumore di R1, a causa della bassa impedenza “vista” sul source, giungerà sull’uscita senza richiudersi su R1stessa portando il suo contributo al rumore totale.Figura 3
Figura 4
Le sollecitazioni dei generatori di rumore
i
n3,
i
n4,
i
n5,
i
n6 rappresentano dei segnali differenziali non bilanciati. In realtà, nello schema circuitale è presente anche un blocco che prende il nome di circuito di controllo di modo comune (CMFB). Questo blocco serve per fissare il potenziale del nodo tra le due resistenze di uscita R2 ad un valore costante che risulterà a massa per le variazioni. Questo fatto farà sì che le correnti di rumore indicate si richiuderanno attraverso R2 nella stessa maniera dei segnali differenziali bilanciati (segnale utile), determinando contributo sull’uscita. In ogni caso, il rumore prodotto dal “cascode” può essere reso trascurabile agendo opportunamente sul fattore gm1R1. Possiamo quindi dire che l’unico contributo di rumore allaS
ni che conta è il rumore RTI dei buffer.-
Circuito di controllo del modo comune
Il CMFB è equivalente ad un transconduttore con degenerazione di source che serve per riportare una tensione esterna di controllo (
V
oc) sul nodo a comune tra le due resistenze di uscita R2. In pratica si annulla la differenza tra le due tensioni a mezzo di un anello di reazione negativa.Figura 5
Le condizioni per cui si ha un buon funzionamento del circuito sono quelle per cui a riposo, in condizioni nominali, il circuito è esattamente bilanciato, cioè si devono eguagliare le correnti sui due rami del CMFB. Deve allora essere verificata la seguente condizione tra le correnti del circuito:
0 0 ( 1) 1 I K m hI = ⋅ +
Conseguentemente deve valere la seguente relazione tra i parametri:
1
+
=
k
mh
Dove
hI
0 è la corrente di riposo nei due rami del CMFB ed m è il rapporto di specchio M3,4/Mbche (per specchi costituiti da transistori con L identiche) rappresenta la molteplicità rispetto alle
W. Anche i parametri k ed h sono dei parametri di molteplicità rispetto alle W dei MOS. Tutte le correnti di polarizzazione del circuito sono ricavate da un unico generatore di corrente di riferimento. In queste condizioni il “loop” di reazione deve agire solo per compensare le piccole variazioni rispetto al caso nominale, dovute agli errori di processo.
- Considerazioni sulla risposta in frequenza dell’amplificatore chopper
La risposta in frequenza del sistema complessivo è limitata dal solo polo dovuto alla capacità d’ingresso dell’amplificatore. Ovvero, si può dimostrare che i buffer d’ingresso introducono poli ad alta frequenza, tali da risultare ininfluenti. La F.d.T. dell’amplificatore differenziale semplice a carichi attivi, con cui si realizzano i buffer d’ingresso, può essere espressa nella seguente maniera:
) 1 ( ) 1 ( 2 1 ) ( 0 m l m vb vb s s s A s A ω ω ω + ⋅ + + ⋅ =
Le pulsazioni
ω
l eω
m indicano rispettivamente il polo dovuto all’impedenza di uscita ed il polo dovuto allo specchio di carico. A mezzo di un taglio di scomposizione tra gate di M1 e nodo di riferimento (ground) possiamo determinare la F.d.T. (1 1 i r V V
) del sistema ad anello chiuso impiegato per riportare la tensione applicata sulla resistenza R1. Da questa quantità, si può verificare che aumentando il valore
A
vb0 (guadagno DC dell’amplificatore differenziale), uno dei due poli della funzione complessiva tenderà ad elidersi con l’unico zero, mentre l’altro si sposterà verso pulsazioni sempre più elevate. Analoghe considerazioni possono essere condotte per lo stadio “cascode”.-
Valutazione della DSP di rumore RTI in banda base in regime dinamico
La quantità Sni( f) ricavata rappresenta la densità spettrale di potenza del rumore dell’amplificatore se questo viene impiegato senza modulatori (funzionamento statico). Lo spettro in uscita in regime dinamico è indicato come Sno,ch(f), che riportato in ingresso diventa Sni,ch(f). Siamo interessati alla sola porzione di Sni,ch(f) nella banda utile del segnale. Come abbiamo trovato, la DSP di rumore riferita all’ingresso risulta:
vb ni S
S ≅2
Un elemento importante da definire è la frequenza di “chopping” f . Da questa quantità dipendono ch
una serie di aspetti:
- L’errore sul guadagno
ε
in è proporzionale a f , come da equazione: chch in
T
τ ε ≅ 2
- Ad f è proporzionale anche l’offset residuo, come precedentemente mostrato. ch
Noto Sni( f) è necessario conoscere come questo venga trasformato in regime dinamico di funzionamento e per effetto della banda finita dell’amplificatore.
Come abbiamo mostrato la banda dell’amplificatore è unicamente determinata dal polo dovuto alla capacità di ingresso:
in S in C R 1 = ω
Quindi, possiamo indicare la risposta in frequenza dell’amplificatore come segue:
in j A A
ω
ω
ω
+ = 1 ) ( 0A monte del secondo modulatore, ritroveremo il seguente spettro di rumore:
) ( 1 ) ( 2 2 2 0 S f f f A f S ni in no ⋅ + =
L’effetto del modulatore di uscita è quello di generare repliche traslate in frequenza dello spettro originario. Tali repliche saranno traslate su multipli della frequenza di “chopping” e pesate con i coefficienti dello sviluppo in serie dell’onda quadra modulante:
∑
∞ ≠−∞ = − + + = 0 2 , ( ( ) ( )) 2 1 ) ( k k ch no ch no K ch no f M S f kf S f kf SSiamo interessati al solo contributo in continua del rumore, visto che la banda base di interesse è estesa solo fino a 10Hz. Valutiamo quindi Sno,ch(0), considerando che Sno( f) è simmetrico rispetto all’asse verticale:
∑
∞ = ⋅ = 1 2 , (0) ( ) k ch no K ch no M S kf S Ricordiamo che:) ) 1 ( ( ) ( / 1 f S S f S f ni Th ni ni = +
e anche che MK2 sono i coefficienti al quadrato dello sviluppo in serie di Fourier dell’onda quadra:
∑
∞∑
= ∞ = = 1 1 2 2 2 8 ( ) k k K k k D Mπ
sostituendo risulta:∑
∞ = + ⋅ + ⋅ = 1 / 1 2 2 2 2 2 2 0 , ) ) 1 ( ( 1 1 ) ( 8 ) 0 ( k ch f ni Th ni in ch ch no kf S S f f k k k D A Sπ
) (kD è un selettore di numeri dispari. Abbiamo detto che risulta:
in ch ch in f f T
π
τ
ε
= 2 =Allora il termine dovuto alla banda dell’amplificatore può essere scritto come :
2 2 2 2 1 ( ) 1 1 1 in in ch k f f k +
π
ε
= +Questo termine è sostanzialmente unitario se
ε
in <<1. Per cui:∑
∞∑
= ∞ = + ≅ 1 1 3 2 / 1 2 0 2 2 2 0 , ) ) ( 8 ( ) 1 ( ) ) ( 8 ( ) 0 ( k ch k f ni Th ni ch no k k D f S A k k D S A Sπ
π
Per l’uguaglianza di Bessel-Parseval vale:
∑
∞ = = 1 2 2 1 ) ( 8 k k k Dπ
∑
∞ = < 1 3 2 1 ) ( 8 k k k Dπ
Possiamo quindi considerare solo la prima replica traslata del rumore Flicker (la quale contiene il 95% della potenza totale).
A questo punto, la DSP RTI in regime dinamico risulta (A è il guadagno DC dell’amplificatore 0
chopper): ch f ni Th ni ch no ch ni f S S A S S S (0) (0) 8 (1) / 1 2 2 0 , , 0
π
+ ≈ = =L’obiettivo che ci siamo posti è stato quello di raggiungere una densità spettrale di potenza di rumore riferita in ingresso pari a −155dB rispetto al segnale utile. Conseguentemente la frequenza di “chopping”, sulla base di tale specifica di rumore e sulla base delle altre quantità inquadrate, è stata fissata a 20 KHz (con tale scelta, l’errore sul guadagno
ε
in e l’offset residuo risultano trascurabili).-
Considerazioni sul buffer di ingresso
Dimostriamo ora che il buffer di ingresso è necessario per determinare una corrente di segnale sulla resistenza R1 che risulti il più possibile svincolata dai parametri di processo e dalla temperatura. L’utilizzo dei buffer è indispensabile per non introdurre distorsioni indesiderate sul segnale utile (anche se essi determinano un’incidenza negativa in termini di complessità, rumore e potenza dissipata). Supponiamo di operare con lo schema d’ingresso di figura 6:
Figura 6
La corrente dipenderebbe anche dalle caratteristiche dei MOS che tecnologicamente possono essere difficili da controllare. Infatti, possiamo impostare le seguenti relazioni:
d gs i gmv = d S Ri v = Conseguentemente: d d G gmRi i gmv − =
Da questa relazione possiamo ricavare:
G d v gmR gm i + = 1
La condizione per svincolarci dal parametro gm è gmR>>1. In tal caso:
R v
i G
d =
Verificare la condizione indicata non è agevole, in quanto si altererebbero altre specifiche di sistema (ad esempio peggiorerebbe la situazione a livello di rumore, in quanto il rumore introdotto dal cascode non risulterebbe più trascurabile). Del resto però il gm dipende dalla polarizzazione, dai parametri di processo e dalla temperatura. Per risolvere il problema (senza imporre la condizione gmR>>1) è necessario l’impiego dei buffer di ingresso. Facciamo riferimento ad uno schema con NMOS; per lo schema a PMOS la trattazione è del tutto analoga e supponiamo di condurre un’analisi a media - bassa frequenza:
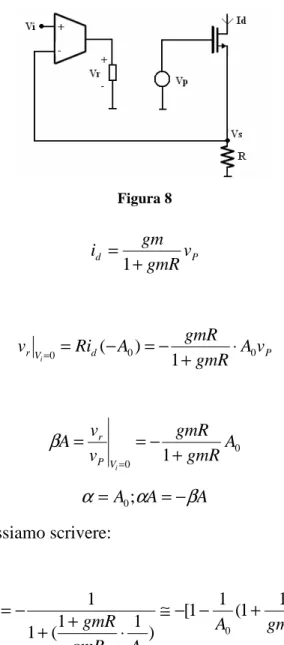
Figura 7
Figura 8 P d v gmR gm i + = 1 P d V r Av gmR gmR A Ri v i 0 0 1 0 ) ( ⋅ + − = − = = 0 0 1 A gmR gmR v v A i V P r + − = = =
β
A A Aα
β
α
= 0; =−Trascurando la quantità γ possiamo scrivere:
)] 1 1 ( 1 1 [ ) 1 1 ( 1 1 0 0 gmR A A gmR gmR Af ≅− − + ⋅ + + − =
Se si aumenta il guadagno in continua dell’amplificatore ci svincoliamo dalla dipendenza del gm . Sulla base dei vincoli di progetto richiesti (rumore etc.), per polarizzare correttamente lo stadio chopper si necessita di una corrente Id =5µA, di una tensione a modo comune applicata ai due terminali di ingresso di 2V e di una tensione di riferimento Vref =1.65V (in modo tale che il CMFB
imponga una tensione di modo comune di uscita pari a 1.65V).
-
Caratterizzazione del chopper
Passiamo alla caratterizzazione del chopper, a mezzo di simulazioni statiche e dinamiche. Iniziamo con simulazioni statiche (le fasi dei modulatori sono fissate a gnd o a V ). dd
1) Valutiamo il punto di riposo dei MOS del chopper. Per simmetria circuitale possiamo considerare soltanto metà rete:
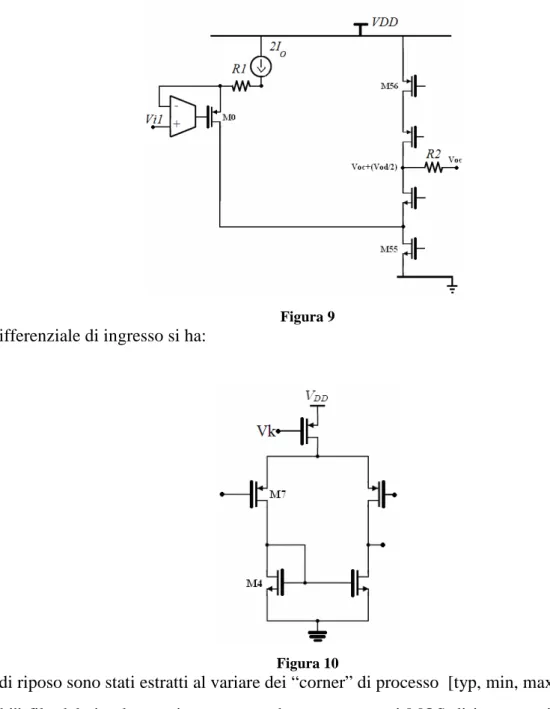
Figura 9 Per il differenziale di ingresso si ha:
Figura 10
I punti di riposo sono stati estratti al variare dei “corner” di processo [typ, min, max].
Dal “.chi” file del simulatore si possono anche estrarre, per i MOS di interesse, i parametri V e SS gdg . La tavola dei punti di riposo in corrispondenza dei “corner” tipici di processo, risulta:
Id Vgs Vds M0 -138uA -1.071V -1.423V M7 -246uA -858.3mV -1.924V M4 246uA 934.8mV 934.8mV M56 -137.1uA -1.492V -709.7mV M55 275uA 1.109V 577.3mV
Si osserva che per tutti i MOS vale correttamente la condizione di saturazione. Inoltre, sempre per valori tipici dei “corner”, si può determinare:
Vss gdg=gm M55 0.4V 1.0735 3 10− × M56 -0.712V 2.7185 4 10− × M4 0.250V 1.45 3 10− × M7 -0.088V 2.959 3 10− × M0 0.1097V 1.657 3 10− ×
Facciamo a questo punto un’analisi DC sweep sul chopper facendo variare la tensione differenziale di ingresso V nel range [-300uV ; +300uV]. Valutando la pendenza della caratteristica si ricava il d
guadagno statico come:
512 10 1 10 12 . 5 4 2 = × × = − − S G
Tale guadagno è dimensionato a mezzo del rapporto tra due resistori (ciò che si ha in un classico amplificatore ad strumentazione).
-
Valutazione della dinamica del CMFB
Con un’analisi DC sweep sull’anello CMFB, la tensione di riferimento Vref viene fatta variare nel range [0.3V;3V]. Si ricava che la linearità di risposta è mantenuta solo sul range [9.19×10−1V ;2.6V] (la corretta reazione dell’anello CMFB è possibile soltanto in questo intervallo di Vref).
-Analisi AC
A mezzo di un’analisi AC possiamo valutare la banda del chopper in condizioni statiche di funzionamento. L’andamento della risposta in frequenza per una temperatura di 27°C, risulta il seguente:
Figura 11
Da tale risposta in frequenza, si osserva che il guadagno DC dell’amplificatore è di +54dB e che la banda a -3dB risulta di 740KHz. Possiamo ripetere lo stesso tipo di analisi a 0°C e 100°C e controllare di quanto varia la banda a -3dB.
Per una temperatura di 0°C si osserva una banda a -3dB di 877KHz. Per una temperatura di 100°C la banda a -3dB vale 600KHz .
Facciamo ora un’analisi AC statica al variare dei “corner” per vedere quanto risulta la DSP di rumore RTI alle possibili frequenze di lavoro di 80KHz e 20KHz. Infatti, la frequenza di “chopping” , inizialmente a 80KHz, è stata ridefinita a 20KHz e questo in modo tale da rendere minori sia l’errore sul guadagno εin sia l’offset residuo introdotto. Per via simulativa, si valuta che diminuendo la frequenza di lavoro, non si riscontra comunque un peggioramento significativo della DSP di rumore.
Figura 12
Osserviamo che a 20KHz si ha un livello di rumore complessivo in ingresso pari a −157dB.
A 80KHz il livello è di −159dB. Questo ci autorizza a ridurre le frequenza di lavoro a spese solo di un modesto aumento della densità di rumore. Situazioni analoghe si registrano per i corner minimi e massimi. Corner minimi: A 80KHz si ha −157dB. A 20KHz si ha −155dB. Corner massimi: A 80KHzsi ha −160dB. A 20KHzsi ha −159dB.
-
Simulazioni della sezione d’ingresso del chopper
Valutiamo per via simulativa la frequenza limite di applicabilità del metodo del CCV sul buffer di ingresso. Per tale analisi, si ricorre alla seguente configurazione circuitale (tale configurazione
simula una scomposizione alle variazioni ma lascia l’anello chiuso in D.C., in modo che si porti sul valore di riposo corretto):
Figura 13
Se si considerassero le resistenze di sorgente nulle tale limite di frequenza risulterebbe il limite superiore di banda dell’intero sistema. Si può determinare:
A V V
p R =
β
In pratica, per ottenere il βA si traccia VdbR in quanto l’ampiezza di V è unitaria. La quantità: p
∞ ∞
=R C
τ
Definisce il limite frequenziale di validità della scomposizione di figura 13. Il minimo valore di frequenza di validità è 1/τ . Occorre fare quindi in modo tale che:
Hz
1 1
<<
τ
Da questa analisi in frequenza si ricava che la frequenza limite di applicabilità del metodo del CCV risulta di 709KHz. Con una quantità:
Hz Hz 1 10 500 1 = × −9 << τ
Dalla precedente simulazione AC si era ottenuta una banda complessiva del chopper in funzionamento statico di 740KHz. Alla luce del risultato relativo al limite per il CCV sulla sezione di ingresso, si deduce che c’è una sostanziale coincidenza tra la frequenza limite determinata ed il limite superiore di banda per l’intero sistema chopper. Tale coincidenza dimostra il risultato teorico, precedentemente discusso; ovvero che, escludendo il polo dato dalla capacità d’ingresso, il limite superiore di banda è determinato dal buffer.
-
Valutazione della capacità di ingresso
La corrente assorbita dal terminale d’ingresso applicando una tensione di ampiezza unitaria alla frequenza di 1.1KHz, risulta di −150dB. In scala lineare, si ha:
nA i i Lg i Lg 62 . 31 5 . 7 20 150 10 10 = = − = − Conseguentemente: PF KHz nA C 4.57 1 . 1 2 62 . 31 = ⋅ = π
Si osserva che tale valore di capacità di ingresso del buffer risulta particolarmente elevato. Una stima della frequenza di taglio del sistema complessivo (considerando resistenze sorgente da
Ω K 80 ), risulta: KHz CR f db 435.32 2 1 3 = = − π Con C=4.57pF.
Possiamo a questo punto fare un’analisi di temperatura sul chopper per le frequenze di funzionamento di 20KHz e di 80 kHz . Vogliamo verificare la variazione relativa della tensione di
uscita in funzione della temperatura. Determiniamo:
) 27 ( ) ( ) 0 ( o o o t V T V V − = ε
Simulazioni a 80KHz : poniamo in ingresso al chopper un segnale costante Vd =100µV e
realizziamo un’analisi transitoria da 125µs a 250µs, in modo tale da scartare il periodo iniziale 125µs di assestamento dell’amplificatore. Il valore medio della tensione di uscita a 27°C e 0°C rispettivamente è:
mV V mV V o o 475 . 46 ) 0 ( 196 . 46 ) 27 ( = =
La tavola dei valori ottenuti dalle simulazioni alle diverse temperature è:
T o V εt 20 46.268mV 4.471 3 10− × 40 46.062mV 8.930 3 10− × 60 45.857mV 13.359 3 10− × 80 45.655mV 17.740 3 10− × 100 45.456mV 22.057 3 10− ×
Possiamo quindi fare il grafico del guadagno del chopper ( 0) in
V V
A= al variare della temperatura. Il grafico è per una frequenza di lavoro di 80kHz e per una resistenza sorgente R=80kΩ:
20 40 60 80 100 454 456 458 460 462 464 G u a d a g n o A Temperatura in °C f=80KHz Figura 14
Si possono ripetere le medesime simulazione per una frequenza di lavoro di 20kHz. In questo caso, si ha: mV V mV V 093 . 50 ) 0 ( 967 . 49 ) 27 ( 0 0 = =
La tavola dei valori ottenuti dalle simulazioni alle diverse temperature è:
T o V εt 20 50.0005mV 1.869 3 10− × 40 49.906mV 3.751 3 10− × 60 49.812mV 5.626 3 10− × 80 49.719mV 7.503 3 10− × 100 49.627mV 9.328 3 10− ×
Anche in questo caso si può fare un grafico del guadagno del chopper al variare della temperatura. Il grafico è per una frequenza di lavoro di 20kHz e per una resistenza sorgente R=80kΩ:
20 40 60 80 100 496,0 496,5 497,0 497,5 498,0 498,5 499,0 499,5 500,0 500,5 G u a d a g n o A Temperatura °C f=20KHz Figura 15
Continuiamo con la caratteristica ingresso / uscita.
Simulazione 1 (resistenza di sorgente da 80KΩ in serie, T=27°C e frequenza di funzionamento a 20kHz ): consideriamo in ingresso al chopper 20 valori distinti per la tensione differenziale V ; si d va da un valore minimo di 10µV fino ad un valore massimo di 200µV e con uno “step” di 10µV . Il grafico dei valori medi per la tensione di uscita in funzione dei valori della tensione differenziale di ingresso risulta:
Figura 16
Abbiamo ripetuto le stesse simulazioni anche senza le resistenze di sorgente in serie, riscontrando in entrambi i casi un’ottima risposta lineare:
Possiamo anche rappresentare gli andamenti grafici della caratteristica nei tre casi di temperatura: 0°C, 27°C, 80°C (sempre con resistenza sorgente da 80KΩ), ottenendo:
0,0 20,0µ 40,0µ 60,0µ 80,0µ 100,0µ120,0µ140,0µ160,0µ180,0µ200,0µ220,0µ 0,00 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,10 0,11 V a lo re m e d io d e lla t e n s io n e d i u s c it a i n V
Tensione differenziale di ingresso in uV 27C 80C 0C
Figura 18
Dai dati simulati, possiamo a questo punto determinare la retta interpolante nei tre casi di temperatura e in questo modo valutiamo il guadagno effettivo dell’amplificatore:
1) Temperatura a 0°C. La retta che interpola i dati è:
x y=−2.57169×10−6+500.89 Quindi, il guadagno associato è A(0°C)=500.89.
2) L’amplificazione a 27°C risulta A(27°C)=499.18. 3) La retta interpolante a 80°C risulta:
x y=4.32389×10−7 +497.10475 Il guadagno è A(80°C)=497.10475
Vediamo allora la variazione relativa del guadagno rispetto alla temperatura:
3 10 5829 . 7 ) 27 ( ) 80 ( ) 0 ( − × = ° ° − ° C A C A C A
C ppm S C T = × × = ° − / 7954 . 94 80 10 10 5829 . 7 . . . 6 3
- Simulazioni al variare della tensione di alimentazione del chopper.
Poniamo il chopper nelle condizioni operative con modo comune di ingresso pari a 2V e modo comune di uscita pari a 1.65V. All’inizio, poniamo la tensione di alimentazione a 3.3V. Si osserva che tutti i MOS del chopper sono saturi e quindi il funzionamento del sistema è corretto.
Possiamo far scendere la tensione di alimentazione a 2.5V. In tal caso, si osserva che il MOS di uscita dello specchio di polarizzazione dell’AD semplice di ingresso esce dalla saturazione.
Anche nello stadio di uscita del chopper i MOS superiori dello specchio cascode escono dalla saturazione, così come altri MOS impilati in questa catena.
Facendo risalire la tensione di alimentazione si ritrova una corretta saturazione di tutti gli elementi a 2.9V di alimentazione.
Questo significa che, con un modo comune di ingresso pari a 2V ed un modo comune di uscita di 1.65V, la minima tensione di alimentazione di funzionamento è di 2.9V.
Per poter diminuire ulteriormente la tensione di alimentazione senza uscire dalla saturazione si possono diminuire le tensioni di modo comune, sia di ingresso che di uscita. Portiamo allora il modo comune di ingresso ed il modo comune di uscita a 1.2V.
In questo modo, si fa sì che lo specchio di polarizzazione degli amplificatori d’ingresso, rimanga saturo fino a 2.5V di alimentazione (ciò grazie alla diminuzione del modo comune di ingresso). Con la diminuzione del modo comune di uscita a 1.2V, si fa sì che anche tutti i MOS della catena dello stadio di uscita rimangano correttamente in saturazione.
Per 2.4V di alimentazione (con le medesime condizioni sul MC di ingresso e di uscita), il MOS di uscita dello specchio di carico dell’amplificatore semplice di ingresso è portato fuori dalla saturazione, facendo così diminuire il guadagno dello stadio e conseguentemente la tensione di ingresso non è più correttamente riportata sulla resistenza R1.
-
Progetto del filtro
L’idea è quella di progettare un filtro Gm-C del secondo ordine con una frequenza di taglio di 1KHz, con un guadagno unitario in banda e che sia al tempo stesso in grado di effettuare una conversione sul segnale utile da “fully-differential” a “single-ended”. Vediamo da prima di inquadrare l’architettura generale del sistema di filtraggio, per poi entrare nello specifico e valutare le possibili soluzioni per implementare i transconduttori necessari. Nella definizione dei
transconduttori da impiegare, occorre tenere in conto di vincoli progettuali come il grado di linearità, l’estensione di dinamica ed il rumore prodotto.
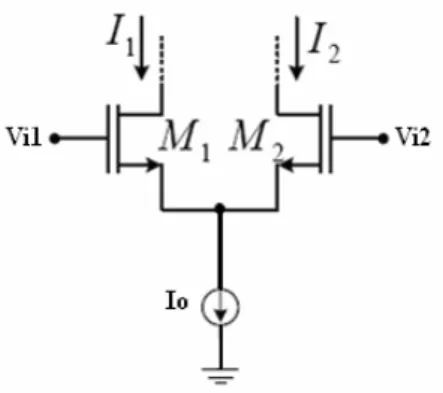
Precedentemente abbiamo indicato che una delle possibilità per realizzare un transconduttore è quella di impiegare una semplice coppia differenziale:
Figura 19 Valgono le relazioni: 0 1 2 1 2 1 2 ( ) I I I V V gm I I i i = + − = −
Per realizzare la differenza tra le correnti, si può impiegare uno specchio di carico:
Figura 20
Questo circuito rappresenta un semplice transconduttore a due ingressi, che potrebbe essere impiegato per realizzare uno stadio di filtraggio unipolare.
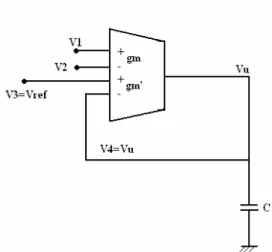
Nel nostro caso, oltre a filtrare si vorrebbe effettuare la conversione sul segnale ed inoltre si vorrebbe poter regolare, a mezzo di un terminale di riferimento Vref , il valore medio del segnale
di uscita (questo in modo tale da poter rientrare nella dinamica utile del convertitore di valle). Si vuole realizzare un sistema flessibile; ovvero, un sistema che possa operare correttamente anche con convertitori A/D diversi. Per questi motivi, anziché usare un transconduttore standard a due ingressi, come ad esempio il transconduttore basato su coppia differenziale precedentemente mostrato, si è pensato di realizzare un transconduttore più complesso, a quattro ingressi, che permettesse di soddisfare le specifiche di progetto richieste.
-
Transconduttore a quattro ingressi
Consideriamo il generico schema del transconduttore a quattro ingressi ideato e colleghiamo in uscita una capacità di carico in modo tale da realizzare un filtro del primo ordine:
Figura 21 La corrente erogata in uscita risulta:
) ( ) ( 3 4 ' 2 1 V gm V V V gm Iu= − + −
La tensione di uscita risulta:
Cs I Vu u 1 = u u CsV I =
) ( ) ( 1 2 ' R u u gmV V gm V V I = − + − R u u u R u V gm V V gm V gm CsV V V gm V V gm CsV ' 2 1 ' ' 2 1 ) ( ) ( ) ( + − = + − + − = R u gmV V gmV Cs gm CsV 1 2 ' ' ) ( ) 1 ( + = − + R u V Cs gm V V Cs gm Cs gm V ' 2 1 ' ) ( ) 1 ( + = − + ) ( ) 1 ( ) 1 ( 2 1 ' ' ' V V Cs gm Cs gm V Cs gm Cs gm Vu R − + + + =
Dal momento che VR è costante, il suo fattore moltiplicativo va calcolato per jω→0 (quindi è unitario). Possiamo scrivere l’espressione, come:
) ( ) 1 ( 2 1 ' ' V V gm Cs gm gm V Vu R ⋅ − + + = Con il rapporto ' gm gm
si tara il guadagno DC del filtro mentre con il rapporto '
gm C
si definisce la frequenza di taglio. Dal momento che il guadagno DC deve essere unitario, si ha che gm=gm' e conseguentemente i due transconduttori interni che costituiscono l’ unico transconduttore a quattro ingressi devono essere uguali. Inoltre, è necessario garantire un accurato matching tra queste due transconduttanze, in modo tale che il rapporto tra le due quantità dette abbia una variazione trascurabile con la temperatura. Al contrario, per quanto riguarda la frequenza di taglio, non è necessaria alcuna stabilizzazione poiché ci troviamo ad una frequenza di lavoro molto più elevata rispetto al limite superiore di banda del segnale. Vediamo allora l’architettura del filtro che è stato proposto.
-
Filtro del secondo ordine proposto
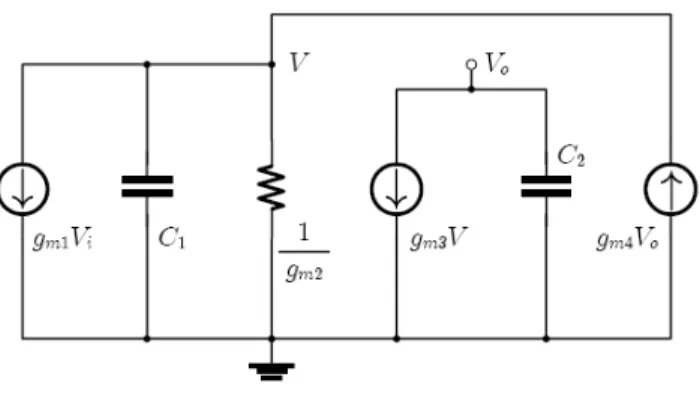
Vediamo da prima una soluzione unipolare, per implementare un filtro Gm-C del secondo ordine. Cella biquadratica di tipo passa basso:
Figura 22
Per semplicità poniamo gm1=gm2 =gm e consideriamo infinite le resistenze di uscita dei transconduttori: ] 1 [ ] 1 [ ] ) [( 1 ) ( 1 ) ( 2 2 1 2 1 1 1 2 1 2 2 2 1 2 2 2 2 2 1 2 2 1 2 1 2 2 1 1 2 2 1 1 gm C C s gm sC V V V C C s gm C C s gm sC gm V V sC gm V C C s gm V C C s gm V V sC gm V V sC gm V sC V V gm V sC gm V V V u u u u u u u u u A u u A + + = = + + ⋅ − − = − − = − = − =
Il denominatore può essere riscritto come:
2 0 2 0 1 1 ω ω s Q s + +
2 1 2 2 0 C C gm = ω Q gm C 0 1 1 ω = Risolvendo il sistema, si ottiene:
2 1 0 C C gm =
ω
1 2 C C Q=Dove ω0 è la pulsazione di taglio e Q è il fattore di qualità del filtro.
Vediamo, dunque, l’architettura del filtro con transconduttore a quattro ingressi:
Figura 23
1
R ed R2, che compaiono nello schema, sono le resistenze di uscita dei transconduttori.
L’analisi in frequenza di tale filtro è esattamente analoga a quella precedentemente sviluppata, per la soluzione unipolare. Ovvero si ritroverebbe la stessa espressione sia per la frequenza di taglio che per il fattore di qualità del filtro (questo considerato il fatto che il segnale di riferimento Vref è costante). Effettuiamo invece un calcolo della risposta in continua che tenga conto anche di R1ed R2:
] ) ( [ ) ( 1 ' 1 1 1 2 2 R V V gm V R gm V R gm V V V R u d A u A u − − = − =
Nell’espressione di V possiamo sostituire in luogo di u VA, ottenendo:
2 2 1 ' 1 1 1 ( ) ] [gmV R gm V V R V gm R Vu = d − u − R − u 2 2 1 2 2 ' 1 2 2 1 ' 1 2 1 2 1gm RRV gm Rgm RV gmV gm R R V gm R gm Vu = d − u + R − u R d u u u V gm R gmV gm R R gmgm RRV gm Rgm RV V + 2 2 + 1' 2 2 1= 1 2 1 2 + 1' 1 2 2 R d u V R gm R gm R gm R gm R gm V gm R R gm R gm R R gm gm V 2 1 1 ' 1 2 2 2 2 1 ' 1 2 2 1 ' 1 2 2 2 1 2 1 1 1+ + + + + =
Tralasciamo per il momento il termine a sommare che contiene il valore di riferimento VR (questo infatti serve semplicemente ad imporre 1.25V (o 1,5V) di valore medio di uscita). Vediamo la situazione per la sola componente continua del segnale differenziale utile V : d
' 1 1 2 1 1 ' 1 2 1 1 1 gm gm R gm R gm gmR V Vu d ⋅ + + ⋅ =
Il termine a sommare l’unità al denominatore si può trascurare, realizzando una R1 (resistenza di uscita al primo transconduttore) molto elevata. In questo modo, si riesce a fare in modo che il guadagno sul segnale differenziale in DC sia esattamente pari a '
1 1
gm gm
, come richiesto.
Questo tipo di soluzione è molto vantaggiosa, poiché a livello di layout riusciamo a creare un matching agevole tra i soli elementi circuitali che definiscono le transconduttanze indicate. Al contrario, ad esempio, nell’ulteriore possibile soluzione di filtraggio indicata in figura 24 (soluzione di tipo fully differential), per ottenere un corretto funzionamento sarebbe richiesto un matching accurato su tutti e quattro i transconduttori presenti nello schema (tra i vari transconduttori dovrebbero essere uguali sia le coppie differenziali che gli specchi di carico interni). Questo all’atto pratico risulterebbe difficile da realizzare in fase di layout.
Figura 24
Inoltre, con questa soluzione di filtraggio dovrà anche essere presente un ulteriore blocco di valle per la conversione del segnale da FD a SE. Per ricavare la F.d.T. del sistema, consideriamo il seguente circuito equivalente unipolare:
Figura 25 Poniamo l’ammetenza: 2 1 gm sC Y = + Allora: V sC gm V V gm V gm Y V o o i 2 3 4 1 ) ( 1 − = − − = Sostituendo:
1 ) ( 1 3 2 2 1 3 2 1 2 4 1 + + = = gm gm gm C s gm gm C C s gm gm V V s T i o Ponendo: 4 3 2 1 gm gm gm gm gm= = = = C C C1= 2 =
Possiamo scrivere il denominatore della funzione di trasferimento, come:
1 ) ( 2 2 2 + + = gm C s gm C s s D Dove: 1 0 = = Q C gm ω Il rapporto 4 1 gm gm
definisce l’amplificazione DC. Lo schema circuitale, completo di CMFF e CMFB, di un transconduttore di tipo pseudodifferenziale che potrebbe essere impiegato per questa soluzione di filtraggio è indicato in figura 26. Di fianco a ciascun transistore è indicata la sua molteplicità.
In questa soluzione, l’imposizione del modo comune di uscita si può realizzare solo attraverso un anello di reazione CMFB (essendo il circuito di tipo “fully-differential”).
Come detto, più semplicemente, si vorrebbe una soluzione in cui sarebbe richiesto “matching” dei soli transistori d’ingresso che determinano i gm che fissano il guadagno in DC. Vediamo allora la nuova architettura circuitale implementata:
Figura 27
Per realizzare il transconduttore di ingresso sono stati fatti diversi tentativi, prima di arrivare a definire la soluzione più adatta che meglio potesse soddisfare le specifiche richieste.
Valutiamo la prima soluzione pensata per realizzare il transconduttore di ingresso (il secondo transconduttore è un elemento standard ed è direttamente ottenibile per simmetria dalla rete usata per il primo transconduttore). Questa prima soluzione impiega MOS polarizzati in zona triodo in modo attivo. Per cercare di aumentare il grado di linearità di risposta del primo transconduttore si è usata una reazione con CMFF (Common Mode Feed Foward). In tal modo si aumenta anche il CMRR del transconduttore. Il blocco CMFF consiste in un circuito in reazione che calcola e sottrae dai nodi di uscita le correnti dovute al solo modo comune d’ingresso, impedendo così che queste possano richiudersi sull’impedenza di uscita.
Figura 28
Senza l’impiego del CMFF lo schema sarebbe il seguente:
Figura 29
Tale soluzione si basa su uno dei tre metodi standard (metodo3) precedentemente indicati per la progettazione dei transconduttori. Con la tensione V si regola il valore della transconduttanza. C
Figura 30
Abbiamo due anelli di reazione costituiti da due operazionali e due inseguitori di source (M3,M4). Gli anelli di reazione impongono che le tensioni di drain di M1ed M2 rimangano fissate a V , in modo tale che C VDS1=VDS2 =VC. Conseguentemente, M1 ed M2 sono portati in zona triodo in quanto forzati dai due anelli. La differenza tra le due correnti è:
con dei passaggi algebrici, si ottiene:
d CV V I I1− 2 =β1 Conseguentemente si ha: C V gm=β1
Il transconduttore si mantiene in zona lineare fino a che i MOS di ingresso rimangono in zona triodo. Osserviamo che nella nostra prima soluzione realizzata per il transconduttore di ingresso, non ci sono anelli di reazione per l’imposizione della tensione di drain sui MOS in triodo. Per regolare tale tensione di drain, si ricorre semplicemente all’impiego di MOS di tipo P pilotati sul gate dalla tensione di controllo V . Se infatti tale tensione di gate sale, si ha che la corrente nei C rami del circuito diminuisce e questo in quanto la tensione sul drain dei MOS in triodo aumenta.
] 2 ) 2 [( ] 2 ) 2 [( 2 2 2 1 2 1 C C d CM C C d CM V V V V V V V V I I − =β + − −β − −
-
Stima del valore della transconduttanza
π 2 1 C gm fP =Con fP =1kHz;C≅100pF (la capacità di filtraggio è dell’ordine dei 100pF). Invertendo si ha:
nS C
f
gm=2
π
P ⋅ =628.318Questa quantità rappresenta il gm che ci occorre. Per un corretto funzionamento dello stadio, i MOS M0,9,8,2,3,5del circuito in figura 28 devono trovarsi in zona triodo. Tutti gli altri MOS devono essere in zona di saturazione. Per ottenere ciò, imponiamo:
V VC =1.25
Teniamo anche presente che per reazione la tensione V è pari alla tensione o V . Anche il modo 3
comune di ingresso al transconduttore vale 1.25V. Allora, sotto queste condizioni si ha:
V V V4 = R =1.25 V V V1= 2 =1.25
In questo modo, otteniamo la corretta polarizzazione per tutti i MOS dello schema.
A questo punto, per una valutazione precisa della transconduttanza, possiamo procedere per via simulativa. Poniamo in uscita un generatore da 1.25V (valore di tensione in uscita al transconduttore in condizioni di riposo) e vediamo quanto valga la corrente assorbita da tale generatore a fronte di uno sbilanciamento noto della tensione differenziale di ingresso. Un primo dimensionamento dei MOS si è fatto soltanto per incontrare le condizioni richieste sui punti di riposo. Imponiamo V1=1.25V e V2 =1.15V . In tali condizioni, si misura che la corrente che va in uscita è 1.4nA: V gm nA Iout=1.4 = ⋅0.1 V nA V nA gm 14 1 . 0 4 . 1 = =
Si osserva che siamo molto al di sotto del valore richiesto. Allora, per tarare il gm , si può agire sul valore di V e sul dimensionamento dei MOS in zona triodo (variando in questo modo il C β). È comunque chiaro che la variazione del β non deve alterare le condizioni di lavoro (ovvero, deve essere mantenuto il corretto punto di riposo dei MOS). Osserviamo che il gm del 2° transconduttore deve essere uguale al valore definito per il primo transconduttore. Dopo diverse prove sperimentali, si è determinato che con un valore di V pari a 1.55V si ottiene sostanzialmente il valore della C
transconduttanza desiderato. In questo modo, abbiamo tarato la transconduttanza considerando a riferimento il suo impiego in uno stadio di filtraggio del primo ordine. In ogni caso, per un filtro del secondo ordine vale lo stesso dimensionamento. Teniamo, anche in considerazione che dal valore della tensione di controllo V e dal dimensionamento dei MOS di ingresso (MOS in triodo) C dipendono anche le caratteristiche di rumore dello stadio. Valutiamo ora la dinamica di ingresso del transconduttore. Si tratta di valutare la dinamica dei MOS di ingresso dello stadio; ovvero, fino a quale tensione differenziale di ingresso tali MOS rimangono in zona triodo, consentendo una risposta lineare. Facciamo variare con una “sweep analysis” la tensione differenziale di ingresso e valutiamo fin dove si mantiene l’andamento lineare della corrente in uscita. Lo sweep va da 0V fino a 1V, con un incremento di 25mV. Derivando la risposta, si può valutare il valore della transconduttanza nell’origine (pendenza della caratteristica nell’origine), che può essere presa come riferimento. Nota la pendenza nell’origine, si può tracciare una retta di riferimento e valutare per quale tensione di ingresso si ha uno scostamento significativo tra le due caratteristiche. Possiamo pensare di valutare il limite di dinamica quando lo scostamento è dell’ordine dello 0.1%. In corrispondenza, si legge il valore di dinamica differenziale, che si assesta a 0.5V. Lo schematico implementato per le simulazioni, risulta:
Il filtro è stato tarato per avere le caratteristiche di un filtro di “Butterworth”. Quindi, deve essere rispettata la corrispettiva condizione sul fattore di qualità Q . In particolare:
2 1 =
Q
-
Problemi della soluzione adottata
Un primo problema della configurazione realizzata è risolvibile usando degli anelli di reazione per poter fissare le tensioni VDS dei transistori in triodo. Infatti, nella prima soluzione sviluppata la situazione era la seguente (possiamo fare riferimento al caso NMOS; l’analisi per il caso PMOS è del tutto duale):
Figura 32
Supponiamo che la tensione di modo comune di ingresso sia fissata per ipotesi. Si ottiene:
) , ( 1 1 1 GS DS D f V V I = ) , ( 2 2 2 GS DS D f V V I = P GS V V 1= n GS V V 2 = In questo caso, il gm è: DS V gm=
β
2 2 1 DS DS DS V V V = + Valutiamo le tensioni VDS1,2: ' 2 2 ' 1 1 GS K DS GS K DS V V V V V V − = − = Però abbiamo che:
) ( ) ( 2 ' 2 1 ' 1 D GS D GS I f V I f V = =
Siccome che le due correnti variano con l’applicazione del segnale, si ha che anche le tensioni 2
, 1 DS
V variano con il segnale. Questo è il motivo per cui è necessario usare dei buffer per riportare la tensione VK. Per un corretto funzionamento le tensioni VDS1,2devono essere fissate ad un valore costante ed imposte uguali sui MOS M1,2. Se così non fosse, si riscontrerebbero dei pronunciati effetti di non linearità. Infatti, per i MOS in triodo, si ha:
2 , 1 2 , 1 2 , 1 DS GS D a V V I = ⋅ ⋅
Dove VGS1,2 risulta proporzionale al segnale differenziale applicato, mentre VDS1,2 dipenderebbero dalle correnti che fluiscono nei rami e quindi dal segnale differenziale medesimo:
2 , 1 2 , 1 2 , 1 ( D ) GS D a f I V I = ⋅ ⋅
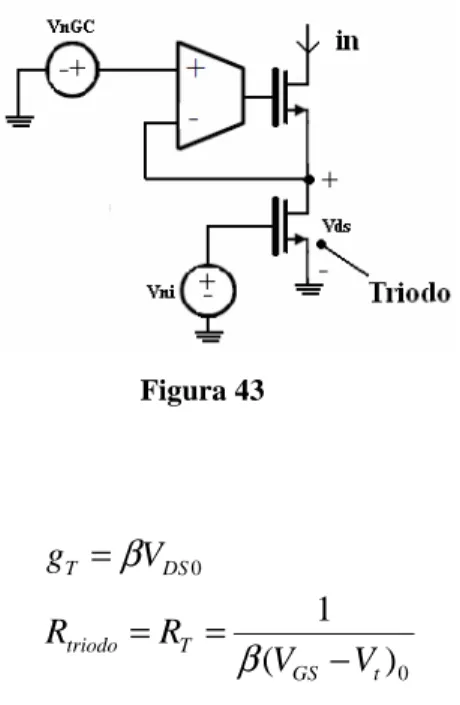
La pendenza della caratteristica cambia con il segnale applicato e questo comporta una forte distorsione sul segnale medesimo trattato. Per risolvere questo problema si può ricorrere alla configurazione a seguire:
Figura 33
Osserviamo che per i MOS in triodo vale la seguente relazione:
2 2 ) ( GS t DS DS D V V V V I =β − −β
E’ chiara quindi la necessità di fissare le due VDS uguali. Infatti, facendo la differenza tra le correnti ai rami, si ha che il termine quadratico indicato nella relazione scompare solo se le due VDS sono uguali. Il singolo buffer n-OTA impiegato ha la seguente configurazione circuitale:
Figura 34
Figura 35
Vediamo allora lo schema circuitale completo (transconduttore triodo attivo con buffer n-OTA per fissare le tensioni VDS):
Figura 36
-
Analisi di Rumore
Il dimensionamento del filtro è stato realizzato in modo tale da soddisfare due fondamentali specifiche di progetto: 1) Imporre almeno 10 ch o f
f = , in modo da ridurre minimo di un fattore 100 la prima componente armonica del chopped offset.
2) Sni,LP <Sni,A.Ovvero, il rumore dovuto al filtro riportato all’ingresso di tutto il sistema deve essere trascurabile rispetto al rumore riportato in ingresso dovuto al chopper, almeno nella banda del segnale.
Il primo requisito fissa la quantità
C gm
, come si riscontra ricordando l’espressione del denominatore della F.d.T. del filtro:
1 ) ( = 2 + + gm C s gm C s s D
Il secondo criterio serve sostanzialmente per fissare le aree dei transistori. Da simulazioni “AC noise”, si può stimare che il rumore dovuto al chopper, valutato alla sua uscita e alla minima frequenza di banda utile risulta:
dB S
A2 0 =−103
Dove S è la DSP di rumore in ingresso al chopper alla minima frequenza della banda utile. 0 Valutiamo quindi il rumore prodotto dal filtro (riportato al suo ingresso) come somma di due contributi: contributo termico e contributo Flicker. Allora, si ha:
f S S f S f lp n Th lp n lp n ) 1 ( ) ( / 1 , , , = +
Possiamo stimare l’ordine di grandezza di ciascuno dei due termini. Il rumore termico si può esprimere come:
gm KT SnlpTh 3 16 , ≅
Essendo il valore del gm richiesto abbastanza elevato, andando a sostituire i valori nell’espressione, si ottiene una Sn,LPTh molto bassa e quindi siamo autorizzati a trascurare tale termine. Conseguentemente, per quanto riguarda il rumore Flicker, si ha che deve essere soddisfatta la seguente disequazione (ponendoci all’ingresso del filtro):
0 2 min 2 S A WLf NF < Dove min 2 WLf NF
è il rumore Flicker (alla fmin) introdotto dal filtro e riportato al suo ingresso, che praticamente coincide con il rumore complessivo introdotto. La quantità fmin è il limite inferiore di banda del segnale che possiamo assumere a 0.1Hz (corrispondente a 10 secondi di osservazione).
Questa è una relazione utile per stimare l’area dei MOS di ingresso. Per ricavare un’altra possibile relazione, ricordiamo che per il transconduttore di ingresso del filtro vale:
L W C V gm ox n C
µ
β
β
= = Conseguentemente si ricava: C ox n V L W C gm=µ
Mettendo a sistema le due relazioni viste è possibile ricavare singolarmente i valori di W ed L per i MOS d’ingresso del transconduttore (che sono i MOS in zona triodo che incidono maggiormente sul rumore prodotto dal filtro).
Osserviamo che per ottenere la transconduttanza richiesta (nella condizione di rumore termico trascurabile) è più conveniente impiegare una topologia con coppia triodo a PMOS anziché NMOS. Il vantaggio è a livello di risparmio di area. Infatti, si ha che la mobilità delle lacune è circa
3 1
della mobilità degli elettroni:
3 n p
µ
µ
≅Considerando una coppia PMOS ed una coppia NMOS a confronto, possiamo indicare con “a” l’area di ogni singolo MOS della coppia. Considerando che i transistori hanno stesse aree, si ha:
p p n nL W L W a= =
Inoltre a parità di VDS si ha:
DS p ox p DS p p ox p DS n ox n DS n n ox n V L a C V L W C gmp V L a C V L W C gmn 2 2
µ
µ
µ
µ
= = = = Imponendo 3 n pµ
µ
≅ otteniamo: 2 2 ) 3 ( 3 p n DS p ox n L L gmn V L a C gmp≅µ
=Imponendo anche gmn =gmp, si determina:
p
n L
L ≅ 3
Ovvero, a parità di D.S.P. di rumore Flicker, si ottiene il valore di transconduttanza desiderato, utilizzando transistori PMOS anziché NMOS con la possibilità di impiegare lunghezze ridotte di un fattore 3 . Si osserva che tale fattore di riduzione non è trascurabile per lunghezze di canale dell’ordine di 100 m
µ
. Infatti a livello di layout, mentre le larghezze di canale possono essere impacchettate, modularizzando i MOS e connettendoli in parallelo, questo non può accadere per le lunghezze e quindi anche un piccolo risparmio di lunghezza è significativo.Fino a questo punto abbiamo considerato NFp =NFn; in realtà per il processo tecnologico impiegato si ha NFp <NFn. Conseguentemente, questo aspetto convalida ulteriormente la scelta fatta per quanto riguarda l’impiego di PMOS come transistori d’ingresso. Infatti poichè
Fn Fp N
N < , si avrà che il rumore Flicker introdotto dalla coppia P di ingresso risulta più basso.
Poniamo il filtro nella configurazione a guadagno unitario e consideriamo V il terminale di 3 reazione e V4 il terminale di riferimento. In questa configurazione si ha che (all’interno della banda
del filtro) il rumore riportato in ingresso è uguale al rumore di uscita. In questa condizione si può ottenere, per via simulativa (analisi AC noise statica), la D.S.P. di rumore RTI del filtro, corrispondente ad un valore di V pari a 1.55V (praticamente il valore necessario per ottenere la C
transconduttanza richiesta) (in realtà, abbiamo considerato solo lo spettro di rumore del transconduttore a quattro ingressi, che però, come si può dimostrare, risulta l’elemento che sostanzialmente determina tutto il rumore complessivo):
Figura 37
Osserviamo che:
- A 0,1Hz il livello della D.S.P. è di -105dB.
A mezzo del simulatore, possiamo anche verificare quelli che sono i MOS più rumorosi e questo serve per poter intervenire di conseguenza aumentando le aree dei MOS in questione.
A questo punto, si tratta di riportare il rumore del filtro in ingresso al chopper e confrontare con il rumore prodotto dal chopper medesimo. Il confronto di rumore deve essere fatto in banda base. Generalmente, si prende a riferimento la minima frequenza di banda. Ponendoci alla frequenza di
Hz
1 .
dB f
Sv,lpRTI( min)=−105
Per riportare il rumore in ingresso al chopper, possiamo applicare la relazione:
2 min min . )] ( [ ) ( f A f S ch lp v
Quindi in scala logaritmica, si tratta di sottrarre al valore indicato in precedenza la quantità 500
20Lg10
− (500 è l’amplificazione effettiva del chopper in banda). Così facendo, si determina un livello di DSP di rumore alla minima frequenza di banda pari a −159dB.
La D.S.P. di rumore del chopper senza modulatori riportata al suo ingresso, considerando una frequenza di lavoro fch =20KHz e con resistenze di sorgente da 40KΩ, ha il seguente
andamento:
Figura 38
Si osserva che in corrispondenza della frequenza di 20KHz si ha una DSP pari a -157dB.
In tal modo abbiamo allora ottenuto per il filtro uno spettro di rumore riportato all’ingresso del chopper confrontabile con quello del chopper stesso.
Successivamente si dimostrerà che se si cambia il valore di V (per motivi di flessibilità), cambia C
anche il valore di rumore RTI introdotto dal filtro in banda base.
Lo spettroSv,CH(f)riportato nel grafico di figura 38 deve essere inteso come spettro di rumore relativo al solo amplificatore interno del sistema a chopper (ovvero, con modulatori disattivati). La validità del confronto indicato può essere giustificata come segue:
Figura 39
Lo spettro di A , come spettro di rumore riportato in ingresso al sistema complessivo chopper, ch inclusi i modulatori, è:
Figura 40
Il livello di D.S.P., in corrispondenza della f , che si legge nello spettro di rumore del solo ch
amplificatore interno, approssimativamente coincide con il livello della D.S.P. di rumore CH
A
S , valutata in zero. In altre parole, per effetto delle traslazioni introdotte dai modulatori, abbiamo che il livello della DSP a f per il solo amplificatore interno è uguale al valore di ch
è proprio quello che ci occorre per il confronto). Il buffer n-OTA che abbiamo deciso di impiegare per fissare le tensioni VDS ha una certa capacità di inseguimento. Per valutare tale capacità di inseguimento abbiamo testato tale buffer a parte, facendo variare la tensione di ingresso da 0V fino a 2.5V. In tal modo si ricava fino a che tensioni il buffer risponde linearmente. Si riscontra che la tensione limite inferiore è di 0.531V, mentre la tensione massima è di 2.2V.
Come di già accennato, il problema è che al variare del gm , cambiano le condizioni di rumore. Infatti, il gm del transconduttore di ingresso risulta:
DS T V
g =
β
Vediamo qualitativamente gli andamenti grafici relativi a
gm 1 e alla quantità d r 1 per un singolo MOS d’ingresso del transconduttore:
Figura 41
Si osserva che non possiamo scendere troppo con VDS e questo per evitare che le quantità
gm 1 e d r 1
possano divenire eccessivamente elevate. Infatti, si può dimostrare che ciò peggiorerebbe in modo inaccettabile le prestazioni in termini di rumore introdotto sul segnale utile. Riportiamo un singolo MOS d’ingresso del transconduttore (MOS in zona triodo):