CAPITOLO SECONDO
Normativa relativa alla geometria stradale
2.1 CLASSIFICAZIONE DELLE STRADE
Conformemente a quanto previsto all’art. 2 del “Nuovo Codice della Strada” (Decreto Legislativo 285/92 e suoi aggiornamenti successivi), le strade vengono classificate, con riguardo alle loro caratteristiche costruttive, tecniche e funzionali, nei seguenti tipi:
A- Autostrade (extraurbane ed urbane) B- Strade extraurbane principali C- Strade extraurbane secondarie D- Strade urbane di scorrimento E- Strade urbane di quartiere
F- Strade locali (extraurbane ed urbane)
Ad ogni categoria di strada è associata una propria geometria ed un proprio intervallo di velocità di progetto.
A partire da questa classifica si individuano, poi, quattro livelli funzionali di reti, oltre ad un livello terminale:
a) Rete primaria
E’ formata dalle strade classificate A, la cui funzione nel territorio è quella di assicurare i collegamenti a carattere nazionale ed interregionale, ovvero, nel caso di autostrade urbane, nell’intera area urbana. Sono a servizio di movimenti di transito o di scorrimento su lunghe distanze e vanno progettate con velocità medie di percorrenza elevate; su queste strade sono escluse alcune componenti di traffico (pedoni, veicoli a trazione animale, cicli, motocicli, ecc…).
b) Rete principale
Vi appartengono le strade classificate B e D, il cui ruolo è quello di distribuire i flussi di traffico dalla rete primaria a quella secondaria ed eventualmente a quella locale (e viceversa). Le strade B provvedono essenzialmente ai collegamenti interregionali o regionali, mentre quelle D servono i collegamenti tra quartieri. Le lunghezze degli spostamenti e le velocità medie di percorrenza sono normalmente inferiori a quelle della rete primaria; ed anche qui si escludono alcune componenti di traffico.
c) Rete secondaria
Comprende le strade C ed E, le quali assicurano i movimenti di penetrazione verso la rete locale: le strade C esplicano la loro funzione territoriale a livello provinciale o interlocale, mentre le strade E svolgono lo stesso ruolo all’interno dei quartieri. Le lunghezze degli spostamenti e le velocità medie risultano ancora minori e non vi sono limitazioni per le componenti di traffico.
d) Rete locale
Vi appartengono le strade F, aventi funzione essenzialmente di accesso (e di uscita, in senso inverso) e funzione territoriale interlocale e comunale, se in ambito extraurbano, ed interna al quartiere per quelle in ambito urbano.
Per esse si hanno entità degli spostamenti e velocità ridotte, senza alcuna limitazione alle componenti di traffico.
Infine, il livello terminale si identifica con le aree e le strutture previste per la sosta; questa funzione territoriale è sempre locale e sono ammesse tutte le componenti di traffico, salvo limitazioni specifiche.
2.2 ANDAMENTO PLANIMETRICO DELL’ASSE STRADALE
Si definisce andamento planimetrico (o tracciato orizzontale) la proiezione dell’asse della strada su di un piano orizzontale.
Il tracciato orizzontale è costituito da elementi a curvatura costante (rettifili ed archi di cerchio), tra i quali vengono sempre inseriti elementi a curvatura variabile ( curve di transito), lungo i quali generalmente si ottiene la graduale modifica della piattaforma stradale, cioè della pendenza trasversale, e, ove necessario, della larghezza.
2.2.1 Rettifili
Per evitare il superamento delle velocità consentite, la monotonia, la difficile valutazione delle distanze e per ridurre l’abbagliamento nella guida notturna, è opportuno che i rettifili abbiano una lunghezza Lr contenuta nel seguente limite:
pMax
r V
L = 22⋅
[ ]
mdove VpMax è il limite superiore dell’intervallo di velocità di progetto della strada, in km/h.
Nello stesso tempo, le Norme stabiliscono che, affinché un rettifilo sia percepito come tale, deve avere una lunghezza non inferiore ai valori riportati nella Tabella 2.1 (le velocità ivi indicate sono quelle che si deducono dal diagramma di velocità per il rettifilo considerato).
Velocità
(km/h) 40 50 60 70 80 90 100 110 120 130 140
Lr minimo
(m) 30 40 50 65 90 115 150 190 250 300 360
2.2.2 Curve circolari
Una curva circolare, per essere correttamente percepita, deve avere uno sviluppo corrispondente ad un tempo di percorrenza di almeno 2.5 secondi, valutato con riferimento alla velocità di progetto della curva.
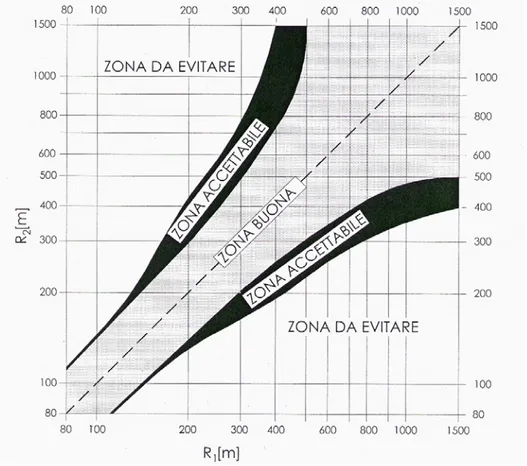
I rapporti tra i raggi R1 e R2 di due curve circolari che, con l’inserimento di un
elemento a curvatura variabile, si succedono lungo il tracciato di strade di tipo A, B, C, D e F extraurbane, sono regolati dall’abaco riportato in Figura 2.1.
In particolare, per le strade di tipo A e B, detto rapporto deve collocarsi nella “zona buona”; mentre per le strade degli altri tipi, è utilizzabile pure la “zona accettabile”.
Figura 2.1 – Rapporti tra i raggi di due curve circolari consecutive
Tra un rettifilo di lunghezza Lr ed il raggio più piccolo fra quelli delle due curve
collegate al rettifilo stesso, anche con l’interposizione di una curva a raggio variabile, deve essere rispettata la relazione:
r L
R> per Lr <300m m
R≥400 per Lr ≥300m
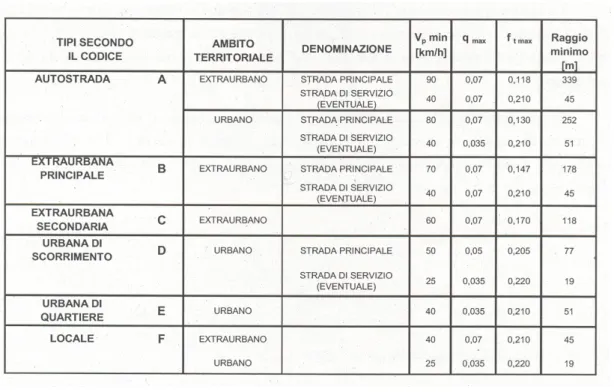
Il raggio minimo delle curve circolari si determina dallo studio dell’equilibrio di un veicolo transitante su una curva circolare; i valori ottenuti sono esposti in Tabella 2.2.
Tabella 2.2 – Valori dei raggi minimi per le varie categorie di strade
Per normativa, al raggio minimo è associata la pendenza trasversale massima qmax,
che per le strade di tipo B e C è del 7%. In rettilineo o nelle curve a grandissimo raggio, la carreggiata stradale è composta da due falde, aventi pendenza trasversale del 2.5%.
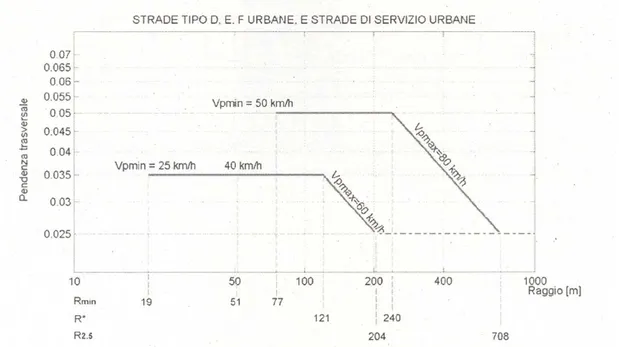
Per valutare la velocità e/o la pendenza delle curve circolari con raggi maggiori del minimo, si possono utilizzare gli abachi di Figura 2.2 e 2.3, in base al tipo di strada analizzata.
Figura 2.2 – Abaco per il calcolo della pendenza e della velocità delle curve circolari, per le strade tipo A, B, C, F extraurbane e strade di servizio extraurbane.
Figura 2.3 – Abaco per il calcolo della pendenza e della velocità delle curve circolari, per le strade tipo D, E, F urbane e strade di servizio urbane.
2.2.3 Curve a raggio variabile
Le curve a raggio variabile devono essere inserite fra due elementi di tracciato a curvatura costante (due curve circolari od una curva circolare ed un rettifilo): lungo esse, infatti, si realizza il graduale passaggio della pendenza trasversale della piattaforma dal valore proprio di un elemento a quello relativo all’elemento successivo. Questo passaggio si ottiene facendo ruotare la carreggiata, o parte di essa, secondo i casi, intorno al suo asse ovvero intorno alla sua estremità interna. E’ preferibile che tale asse sia quello della carreggiata, perché ciò comporta un sollevamento minore del bordo esterno della piattaforma (è questo il caso delle strade tipo C). Per le strade a doppia carreggiata con larghezza dello spartitraffico minore di 4.00 m, per evitare che questo acquisti una pendenza trasversale eccessiva, la rotazione avviene intorno al ciglio interno di ciascuna carreggiata (è questo il caso delle strade tipo B).
Le curve a raggio variabile sono progettate in modo da garantire:
• una variazione di accelerazione centrifuga non compensata (contraccolpo) contenuta entro valori accettabili;
• una limitazione della pendenza (o sovrapendenza) longitudinale delle linee di estremità della piattaforma;
• la percezione ottica corretta dell’andamento del tracciato.
La curva a raggio variabile maggiormente impiegata è la clotoide, che è una particolare curva della famiglia delle spirali generalizzate, definite dalla seguente equazione: 1 + = ⋅ n n A s r
dove r = raggio di curvatura nel punto P generico; s = ascissa curvilinea nel punto P generico; A = parametro di scala;
Per n =1 si ottiene l’equazione della clotoide:
2
A s r⋅ =
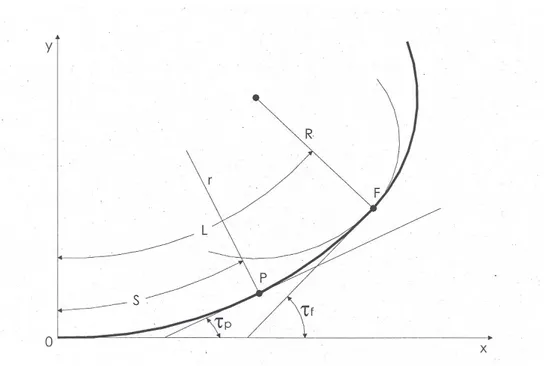
Gli elementi caratteristici della generica clotoide di parametro A sono rappresentati in Figura 2.4:
Figura 2.4 – Andamento della clotoide di parametro A.
dove:
F = punto finale della clotoide;
R (m) = raggio dell’arco di cerchio da raccordare; L (m) = lunghezza dell’arco di clotoide;
τp = angolo di deviazione nel generico punto P;
τf = angolo di deviazione nel punto di fine della clotoide.
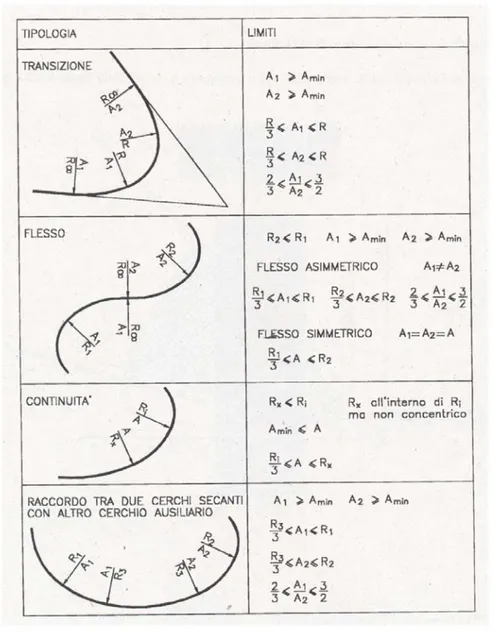
I casi più importanti nei quali la clotoide viene inserita in un tracciato sono riassunti nella Figura 2.5, dove sono anche indicate le limitazioni per i valori dei relativi parametri.
Figura 2.5 – Indicazioni relative ai raccordi clotoidici.
2.2.4 Calcolo degli elementi di una clotoide
Si distinguono tre casi fondamentali, a cui possono ricondursi tutte le altre situazioni che si presentano nella realtà:
1) Clotoide rettifilo – curva
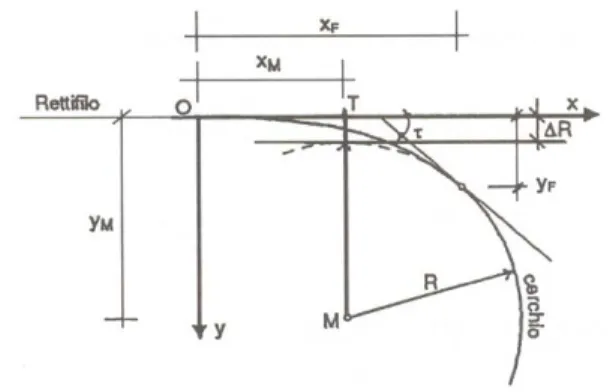
Generalmente è fissata la posizione del rettifilo e della curva ( e quindi è noto lo scostamento ∆R con il rettifilo). Si tratta di individuare il parametro A e l’origine del sistema di assi a cui è riferita la clotoide (Figura 2.6).
Figura 2.6 –Inserimento di una clotoide tra un cerchio ed un rettifilo.
Il parametro A della clotoide e le altre grandezze si ricavano dalle seguenti espressioni: 4 3 14 3 1 24 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⋅∆ ⋅ ∆ ⋅ = R R R R A 2 2 2R A = τ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − ⋅ ⋅ = 216 10 1 2 4 2 τ τ τ A xF ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − ⋅ ⋅ = 1320 42 3 2 5 3 τ τ τ τ A yF τ sen R x xM = F − ⋅ yM = yF +R⋅cosτ
Ottenuto il parametro A, la curva si traccia, individuando in primo luogo l’origine O del sistema di assi cui essa è riferita: ciò si ottiene riportando lungo il rettifilo, a partire dal punto T, il segmento xM, che rappresenta
l’ascissa del centro del cerchio da raccordare. Fatto ciò, si possono riportare altri punti della curva, calcolati avvalendosi delle espressioni precedenti: le coordinate dei punti intermedi si determinano con le stesse espressioni usate per il punto F, sostituendovi a τ un valore minore (
R s 2 =
τ , con s ascissa
2) Clotoide di flesso
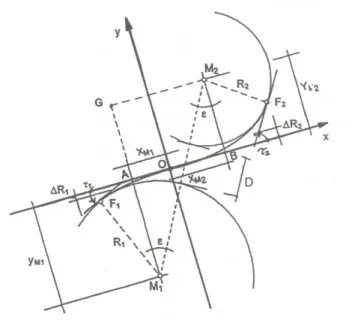
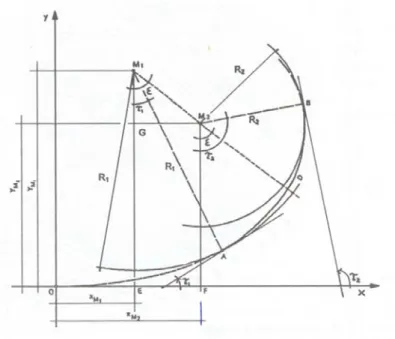
Si definisce “clotoide di flesso” il raccordo tra due archi di cerchio esterni l’uno all’altro e percorsi in senso opposto; esso è formato da due rami di clotoide con curvatura di segno opposto ed aventi in comune il punto O, in cui la curvatura è nulla (Figura 2.7).
Figura 2.7 – Inserimento di una clotoide di flesso.
Nella stragrande maggioranza dei casi, i dati del problema sono i raggi R1 e
R2 (con ) dei due cerchi da raccordare e la posizione relativa dei due
cerchi individuata dalla distanza D. Resta da determinare i valori dei parametri A1 ed A2 con 1 2 R R ≤ 2 1 A
A ≠ (oppure solo un parametro A=A1=A2, se la
clotoide introdotta è simmetrica) dei due rami di clotoide e la posizione del sistema di assi cui essi sono riferiti.
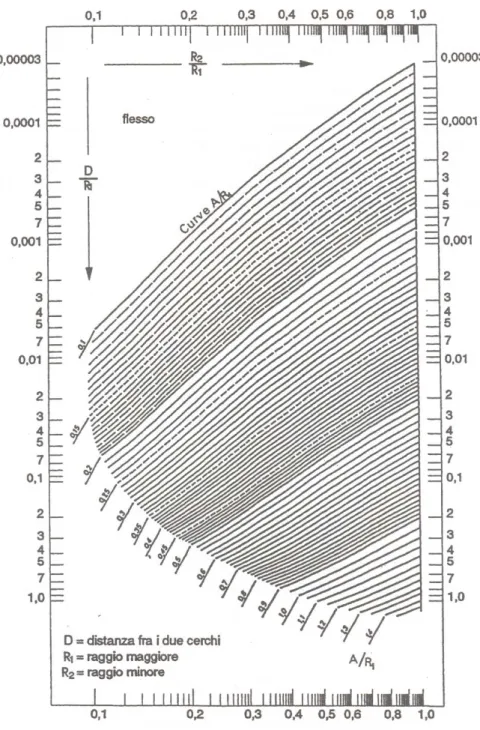
Il generico parametro A della clotoide si determina facilmente, avvalendosi del metodo di Osterloch: egli infatti, a partire dall’equazione
(
) (
) (
)
2 2 1 2 2 1 2 2 1 R D yM yM xM xMR + + = + + + ha calcolato la variazione del
rapporto A/R1 in funzione delle due variabili R2/R1 e D/R1, ottenendo una
famiglia di curve che consente di ricavare immediatamente il parametro A (Figura 2.8).
Figura 2.8 – Abaco per il calcolo del parametro A di una clotoide di flesso.
Una volta calcolati i rapporti R2/R1 e D/R1, si individua sull’abaco il punto
che ha queste coordinate e la curva passante per quel punto (o la più vicina), che è caratterizzata da un numero che moltiplicato poi per R1 fornisce il
cercato parametro A.
A questo punto occorre individuare il sistema di assi cui sono riferiti i due archi di clotoide; a tale proposito dalla Figura 2.7 si vede che la retta M1M2
forma con la direzione dell’asse y un angolo ε, che può essere agevolmente calcolato con la seguente:
2 1 2 1 M M M M y y x x arctg + + = ε
dove xM1 = xF1−R1⋅senτ1 yM1 = yF1+R1⋅cosτ1
xM2 = xF2 −R2 ⋅senτ2 yM2 = yF2 +R2⋅cosτ2 ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − ⋅ ⋅ = 216 10 1 2 4 1 2 1 1 1 1 τ τ τ A xF ⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − ⋅ ⋅ = 1320 42 3 2 5 1 3 1 1 1 1 1 τ τ τ τ A yF ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − ⋅ ⋅ = 216 10 1 2 4 2 2 2 2 2 2 τ τ τ A xF ⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − ⋅ ⋅ = 1320 42 3 2 5 2 3 2 2 2 2 2 τ τ τ τ A yF 2 1 2 1 1 2R A = τ 2 2 2 2 2 2R A = τ
Per il tracciamento della curva si possono allora riportare a partire da M1 e
M2 i segmenti M1A=yM1 e M2B=yM2 formanti l’angolo ε con la direzione
M1M2 (come indicato in Figura 2.7), ottenendo così la direzione AB dell’asse
x; l’origine degli assi si ottiene riportando xM1 da A ovvero xM2 da B.
3) Clotoide di continuità
Si definisce “clotoide di continuità” un arco di clotoide, che raccorda due archi di cerchio l’uno interno all’altro, ma non concentrici, percorsi nello stesso senso.
Esso è formato (Figura 2.9) da una porzione di clotoide, che inizia nel punto A con curvatura 1/R1 e termina nel punto B con curvatura 1/R2.
Figura 2.9 – Inserimento di una clotoide di continuità.
In analogia con quanto detto per la clotoide di flesso, generalmente i dati del problema sono i due raggi R1 e R2 (con R2 <R1) delle curve circolari e la
distanza D tra i due cerchi, misurata lungo i centri delle stesse curve.
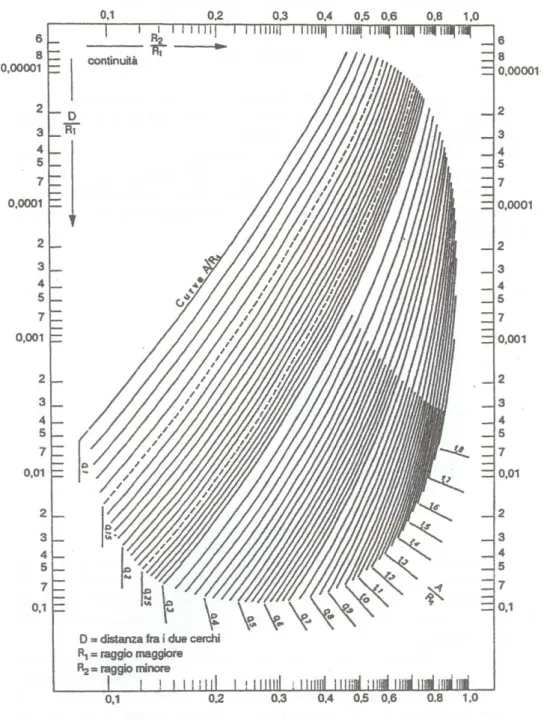
Come prima, il parametro A della clotoide si calcola facilmente, utilizzando un abaco opportuno, determinato da Osterloch appositamente per le clotoidi di continuità (Figura 2.10).
Su di esso, infatti,una volta calcolati i rapporti R2/R1 e D/R1, si individua il
punto che ha queste coordinate e la curva passante per quel punto (o la più vicina), che è caratterizzata da un numero che moltiplicato poi per R1 fornisce
Figura 2.10 – Abaco per il calcolo del parametro A della clotoide di continuità.
Determinato il parametro A, si individua il sistema di riferimento della clotoide, calcolando l’angolo ε, che, riportato a partire dalla retta M1M2
(Figura 2.9), fornisce la direzione dell’asse y:
2 1 1 2 M M M M y y x x arctg − − = ε
dove xM1 = xF1−R1⋅senτ1 yM1 = yF1+R1⋅cosτ1 xM2 = xF2 −R2 ⋅senτ2 yM2 = yF2 +R2⋅cosτ2 ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − ⋅ ⋅ = 216 10 1 2 4 1 2 1 1 1 τ τ τ A xF ⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − ⋅ ⋅ = 1320 42 3 2 5 1 3 1 1 1 1 τ τ τ τ A yF ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − ⋅ ⋅ = 216 10 1 2 4 2 2 2 2 2 τ τ τ A xF ⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − ⋅ ⋅ = 1320 42 3 2 5 2 3 2 2 2 2 τ τ τ τ A yF 2 1 2 1 2R A = τ 2 2 2 2 2R A = τ
I segmenti M1E=yM1 e M2F=yM2 (Figura 2.9) individuano l’asse della ascisse
x; mentre l’origine O si ottiene riportando, a partire dal punto E o dal punto F, rispettivamente la lunghezza xM1 o xM2.
2.2.5 Verifiche del parametro di scala di una clotoide
Per una corretta progettazione, il parametro A della clotoide deve soddisfare tre verifiche:
- Verifica 1: limitazione del contraccolpo
Affinché lungo un arco di clotoide si abbia una graduale variazione dell’accelerazione trasversale non compensata nel tempo (contraccolpo c), fra il parametro A e la massima velocità, V (km/h), desunta dal diagramma di velocità, per l’elemento di clotoide deve essere verificata la relazione:
2
021 .
0 V
- Verifica 2: sovrapendenza longitudinale delle linee di estremità della carreggiata Nelle sezioni di estremità di un arco di clotoide, la carreggiata stradale presenta differenti assetti trasversali, che vanno raccordati longitudinalmente, introducendo una sovrapendenza nelle linee di estremità della carreggiata rispetto alla pendenza dell’asse di rotazione.
Nel caso in cui il raggio iniziale sia di valore infinito (rettilineo o punto di flesso), il parametro deve verificare la seguente disuguaglianza:
(
i f)
i q q B i R A A ⋅ ⋅ ⋅ + ∆ = ≥ 100 max min dove:Bi (m) = distanza fra l’asse di rotazione ed il ciglio della carreggiata nella sezione
iniziale della clotoide;
∆imax (%) = sovrapendenza longitudinale massima della linea costituita dai punti che
distano Bi dall’asse di rotazione (in assenza di allargamento tale linea coincide con
l’estremità della carreggiata);
100
ci i
i
q = con ici = pendenza trasversale iniziale, in valore assoluto;
100
cf f
i
q = con icf = pendenza trasversale finale, in valore assoluto;
Nel caso in cui anche il raggio iniziale sia di valore finito (continuità), il parametro deve verificare la seguente disuguaglianza:
(
)
100 1 1 max min i R R q q B A A f i i f i ∆ ⋅ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − ⋅ = ≥dove:
Ri (m) = raggio nel punto iniziale della clotoide;
Rf (m) = raggio nel punto finale della clotoide.
- Verifica 3: criterio ottico
Per garantire la percezione ottica del raccordo, deve essere verificata la relazione:
3 /
R
A≥ (Ri/3 in caso di continuità)
Inoltre, per garantire la percezione dell’arco di cerchio alla fine della clotoide, deve essere:
R A≤
2.3 ANDAMENTO ALTIMETRICO DELL’ASSE STRADALE
L’ andamento altimetrico (o profilo longitudinale) è la linea piana, in cui si trasforma l’asse stradale disegnato su di una superficie cilindrica a generatrici verticali avente come direttrice il tracciato orizzontale quando questa superficie viene sviluppata su un piano.
Il profilo altimetrico è costituito da tratti a pendenza costante (livellette), collegati da raccordi verticali convessi e concavi: è infatti necessario inserire raccordi curvilinei tra due livellette consecutive, per motivi di sicurezza, confortevolezza e regolarità di marcia.
Sono preferibili i raccordi parabolici, poiché, avendo una variazione di pendenza per unità di lunghezza costante, appaiono migliori dal punto di vista del moto.
Il tracciamento del raccordo verticale con arco di circonferenza risulta ,invece, poco pratico, tenuto conto che difficilmente la verticale per il punto d’incontro delle due livellette da raccordare coincide con la bisettrice dell’angolo che esse formano.
Di conseguenza, anche se la lunghezza del raccordo si calcola come arco di curva circolare, si preferisce effettuare il suo tracciamento come arco di curva parabolica di pari lunghezza.
Lo sviluppo dell’arco parabolico si determina con la seguente espressione:
100 i R L v ∆ ⋅ = (m)
dove ∆i è la variazione di pendenza in percento delle livellette da raccordare ed Rv è
il raggio del cerchio oscuratore, nel vertice della parabola.
L’equazione utilizzata per tracciare l’arco di parabola da inserire tra due livellette è , rispetto al sistema cartesiano indicato in Figura 2.11, la seguente:
2
ax bx y= −
dove:
a = parametro della parabola =
v R L i 2 1 2 100⋅ = ∆
[ ]
−1 m 100 1 i b= a Rv 2 1= = raggio del cerchio oscuratore nel vertice A della parabola
[ ]
m100 2 100 i R a i L = v⋅ ∆ ⋅ ∆
= = lunghezza dell’arco di parabola
[ ]
mv a R i L i i x ⋅ = ⋅ ∆ = 100 1 1
= ascissa del punto a tangente orizzontale ( punto più alto del dosso o più basso della sacca)
[ ]
m2 1 100 a a a x a x i y = ⋅ − ⋅
[ ]
m 2 100 8 ⎟⎠ ⎞ ⎜ ⎝ ⎛ ∆ ⋅ = R i f v[ ]
mFigura 2.11 – Elementi geometrici dei raccordi parabolici.
Convenzionalmente alle pendenze delle livellette viene attribuito un segno, che è positivo in salita e negativo in discesa: quindi, essendo ∆i = i2 – i1 , risulta sempre
∆i<0 per i raccordi convessi e ∆i>0 per quelli concavi.
Il raccordo parabolico, dati i1 ed i2, è definito se si conosce il raggio Rv del cerchio
oscuratore nel vertice. La determinazione del valore minimo di Rv è basata
essenzialmente su tre criteri:
1. garantire che nessuna parte del veicolo (eccetto le ruote) abbia contatti con la superficie stradale;
2. assicurare il comfort dell’utente;
3. assicurare le visuali libere necessarie per la sicurezza di marcia.
Il primo criterio comporta:
m R
Rv ≥ vmin =20 nei dossi m
R
Con il secondo criterio si pone un limite all’accelerazione verticale av: le Norme
suggeriscono avmax =0.6m/s2; per cui risulta:
max 2 v v p v a R v a = ≤ dove:
vp (m/s) = velocità di progetto con cui viene percorso il raccordo;
Rv (m) = raggio del raccordo verticale.
⇒ 2
min 1.66 p
v v
R = ⋅
Il terzo criterio richiede che il conducente possa vedere, ad una distanza D pari almeno alla distanza di arresto Da, un oggetto che si trovi sulla sua traiettoria.
La distanza di visibilità per l’arresto è definita come lo spazio minimo necessario perché un conducente possa arrestare il veicolo in condizione di sicurezza davanti ad un ostacolo imprevisto. Essa è data dalla somma dello spazio di frenatura e dello spazio percorso alla velocità V iniziale durante il tempo τ, detto “tempo complessivo di reazione”,che è necessario al conducente per percepire la presenza dell’ostacolo e per mettere in azione i freni. Per il tempo complessivo di reazione si assumono valori linearmente decrescenti con la velocità: da 2.6 s per 20km/h a 1.4 s per 140km/h, in considerazione della attenzione più concentrata alle alte velocità.
(
− ⋅V)
= 2.8 0.01
τ (s) con V in km/h
L’espressione con cui si calcola la distanza di visibilità per l’arresto è la seguente:
∫
+ + ⎥⎦ ⎤ ⎢⎣ ⎡ ± ⋅ − ⋅ = + = 1 0 ( ) ( ) 100 ) ( 6 . 3 1 6 . 3 0 2 0 2 1 V V a l a dV V r m V R i V f g V V D D D τ (m)dove:
D1 = spazio percorso nel tempo τ (m);
D2 = spazio di frenatura (m);
V0 = velocità del veicolo all’inizio della frenatura (km/h);
V1 = velocità finale del veicolo, che è pari a zero in caso di arresto(km/h);
i = pendenza longitudinale del tracciato (%); τ = tempo complessivo di reazione (s); g = accelerazione di gravità (m/s2); Ra = resistenza aerodinamica (N);
m = massa del veicolo (kg);
fl = quota limite del coefficiente di aderenza impegnabile longitudinalmente per la
frenatura;
r0 = resistenza unitaria al rotolamento, che è trascurabile (N/kg).
Con riferimento ad una autovettura media, risulta:
2 5 10 61 . 2 V m Ra ⋅ ⋅ = − (N/kg)
Mentre per fl si possono adottare le due serie di valori riportate nella Tabella 2.3, una
relativa alle autostrade e l’altra valida per tutti gli altri tipi di strade. Questi valori sono compatibili anche con superficie stradale leggermente bagnata (spessore del velo idrico di 0.5 mm). VELOCITA’ Km/h 25 40 60 80 100 120 140 fl autostrade - - - 0.44 0.40 0.36 0.34 fl altre strade 0.45 0.43 0.35 0.30 0.25 0.21
Quindi sulla base del terzo criterio occorre esaminare separatamente i raccordi concavi e quelli convessi.
2.3.1 Raccordi verticali concavi (sacche)
In questo caso, non si pongono problemi di visibilità con luce diurna, mentre di notte è necessario garantire che il tratto di strada illuminato dai fari abbia lunghezza non inferiore alla distanza di arresto Da.
Il problema del sorpasso non si pone neppure di notte, poiché si vedono le luci del veicolo che sopraggiunge in senso opposto: l’unica difficoltà che si può avere consiste nel fatto che l’utente può non stimare correttamente la distanza a cui si trova il veicolo sopraggiungente in senso opposto.
Sulla base di tutte queste considerazioni, il raggio minimo del raccordo verticale si determina come di seguito, distinguendo il caso in cui Da è inferiore allo sviluppo L
del raccordo da quello in cui invece Da è superiore alla lunghezza L.
Siano:
Rv = raggio del raccordo verticale concavo (m);
Da = distanza di visibilità da realizzare per l’arresto di un veicolo di fronte ad un
ostacolo fisso (m);
∆i = variazione di pendenza delle due livellette, espressa in percento; h = altezza del centro dei fari del veicolo sul piano stradale (m);
ϑ = massima divergenza verso l’alto del fascio luminoso rispetto l’asse del veicolo, Abbiamo: - Se Da <L:
(
)
ϑ sen D h D R a a v = ⋅ + 2 2 - Se Da >L: ⎢⎣⎡ ⋅(
+)
⎥⎦⎤ ∆ − ⋅ ∆ ⋅ = h D senϑ i D i Rv 2 100 a 100 aLe Norme stabiliscono h = 0.50m e ϑ = 1° e forniscono l’abaco, riportato in Figura 2.12, che consente di valutare immediatamente Rv in funzione di ∆i, in quanto
traduce graficamente le due relazioni precedenti, distinguendo il caso in cui Da < L
da quello in cui Da > L (essendo L lo sviluppo del raccordo).
2.3.2 Raccordi verticali convessi (dossi)
In questo caso, il raggio del raccordo verticale deve essere tale da garantire la visibilità sul raccordo per la sicurezza della circolazione.
Dovendo in ogni caso garantire la possibilità di arrestarsi di fronte ad un ostacolo anche di piccole dimensioni, la distanza di visibilità D tra l’occhio del conducente e l’ostacolo deve essere pari alla distanza di arresto Da. Nel caso in cui, nelle strade a
due corsie con doppio senso di marcia, si voglia assicurare il sorpasso, si dovrà assumere D = Ds (essendo Ds la distanza di visibilità per il sorpasso, pari a 5.5 V, con
V la velocità di progetto in km/h del tratto di strada su cui avviene il sorpasso). Sulla base di tutte queste considerazioni, il raggio minimo del raccordo verticale si determina come di seguito, distinguendo il caso in cui D è inferiore allo sviluppo L del raccordo da quello in cui invece D è superiore alla lunghezza L.
Siano:
Rv = raggio del raccordo verticale convesso (m);
D = distanza di visibilità da realizzare (m);
∆i = variazione di pendenza delle due livellette, espressa in percento; h1 = altezza sul piano stradale dell’occhio del conducente (m);
h2 = altezza dell’ostacolo (m); Abbiamo: - Se D< L:
(
)
2 1 2 1 2 2 2 h h h h D Rv ⋅ ⋅ + + ⋅ = - Se D>L: ⎢⎣⎡ ⋅(
+ + ⋅ ⋅)
⎥⎦⎤ ∆ − ⋅ ∆ ⋅ = 1 2 2 1 2 100 100 2 h h h h i D i RvIn caso di visibilità per l’arresto di un veicolo di fronte ad un ostacolo fisso (D = Da),
le Norme CNR assumono h1 = 1.10m e h2 = 0.10m, mentre pongono h1 = h2 =1.10m,
Le Norme riportano inoltre due abachi (Figure 2.13 e 2.14), che traducono graficamente le relazioni precedenti e dai quali si può ricavare direttamente il valore di Rv in funzione della variazione della pendenza ∆i delle livellette e per diversi
valori della distanza di arresto Da e di sorpasso Ds.
Figura 2.13 – Abaco per il calcolo dei raggi minimi di un raccordo convesso (h1 = 1.10m; h2 = 0.10m; D =Da).
Quando si hanno piccole variazioni di pendenza fra le livellette, è bene assumere raggi dei raccordi molto grandi (ben maggiori dei valori minimi ricavati dagli abachi o dalle formule), altrimenti si ha l’impressione che vi siano dei punti angolosi.
Figura 2.14 – Abaco per il calcolo dei raggi minimi di un raccordo convesso (h1 = h2 = 1.10m; D =Ds).
2.4 INTERSEZIONI STRADALI
Si definisce intersezione stradale (nodo) l’area individuata da tre o più tronchi stradali (archi) che convergono in uno stesso punto, nonché dai dispositivi e dagli apprestamenti atti a consentire ed agevolare le manovre per il passaggio da un tronco all’altro.
Le intersezioni, qualunque sia la loro collocazione territoriale,costituiscono punti critici del sistema viario per effetto delle interferenze che in esse si instaurano tra le diverse correnti di traffico.
Si acuiscono pertanto, nel loro ambito, i problemi legati alla sicurezza e quelli relativi alla regolarità ed efficienza della circolazione. Con riferimento alla sicurezza è importante la localizzazione dell’incrocio: è necessario che esso sia ben visibile e chiaramente percepito dagli utenti ed è desiderabile che le strade si intersechino sotto angoli non troppo acuti.
Per quanto riguarda la visibilità, per il corretto e sicuro funzionamento delle intersezioni, è necessario che i veicoli che giungono all’incrocio e che si apprestano a compiere le manovre di attraversamento o di immissione possano reciprocamente vedersi, al fine di adeguare la loro condotta di guida nel rispetto dei modi di regolazione dell’incrocio stesso.
In corrispondenza di una intersezione ogni veicolo compie alcune manovre, consistenti essenzialmente in variazioni di velocità e/o di traiettoria che, per la presenza di altri veicoli, non possono essere effettuate liberamente. Si generano quindi interferenze tra le correnti di traffico, che devono essere opportunamente disciplinate per garantire sicurezza e funzionalità nella maggior misura possibile. Le interferenze fra le correnti di traffico generate rappresentano potenziali punti di collisione tra veicoli, che vengono denominati punti di conflitto.
Nella progettazione di una intersezione, l’obiettivo principale è la riduzione dei punti di conflitto fra le correnti veicolari insieme a quello di rendere facilmente interpretabili le manovre possibili per indurre gli utenti a tenere un corretto comportamento.
Le intersezioni si suddividono in tre grandi categorie:
1- intersezioni a raso, suddivise a loro volta in intersezioni lineari ed a rotatoria, in cui le strade confluenti risultano complanari con conseguenti interferenze fra le correnti in transito ed in svolta;
2- intersezioni semaforizzate, che sono ancora intersezioni a raso in cui è previsto, però, l’arresto periodico ed alternato delle correnti di traffico;
3- intersezioni a livelli sfalsati, in cui la separazione altimetrica tra le correnti in transito si realizza mediante opere di scavalco, mentre la connessione fra le due strade è assicurata da una o più rampe.
2.4.1 Rotatorie
La definizione di rotatoria (mutuata dalla Normativa francese) attualmente condivisa è la seguente: “incrocio costituito da un’area centrale inaccessibile, circolare, circondata da un anello percorribile in una sola direzione ed in senso antiorario dal traffico proveniente da più entrate, annunciato da specifiche indicazioni segnaletiche. Queste ultime servono per indicare agli utenti l’immissione in una particolare intersezione dove vige la regola di precedenza dei veicoli che percorrono l’anello, qualunque sia il tipo di strada da cui provengono.”
In Italia la realizzazione di rotatorie con precedenza all’interno dell’anello è stata resa possibile con l’emanazione del Nuovo Codice della Strada, entrato in vigore nel 1993; infatti l’ art. 145 del Nuovo Codice stabilisce che “i conducenti di veicoli su rotatoria devono rispettare i segnali negativi della precedenza”.
La precedenza all’interno dell’anello ha permesso di risolvere il problema dell’ “autosaturazione” della circolazione all’interno del carosello, problema dovuto alla antecedente regola di precedenza a destra, che implicava la necessità di ricorrere a rotatorie di grande diametro per poter soddisfare crescenti volumi di traffico.
Con la precedenza all’interno dell’anello, invece, si possono realizzare soluzioni che richiedono minor consumo di spazi (le rotatorie compatte e le mini-rotonde); e tutto ciò comporta, mantenendo pressocchè invariata la capacità, una riduzione dei costi ed un aumento di sicurezza, in quanto con la riduzione delle dimensioni dell’isola centrale diminuisce la velocità.
Una sistemazione a rotatoria presenta una serie di aspetti positivi, tra cui: • La connotazione di un luogo;
• La moderazione del traffico (la rotatoria invita a percorrere traiettorie comportanti una riduzione della velocità);
• La riduzione dei punti di conflitto (una rotatoria a quattro rami, con una corsia nell’anello ed alle entrate, ha 8 punti di conflitto contro i 32 di un incrocio analogo);
• La riduzione dei tempi di attesa;
• La flessibilità degli itinerari, data la semplice possibilità di invertire la marcia;
• Una segnaletica stradale semplificata.
La realizzazione di una rotatoria è però da sconsigliare in mancanza di spazio, o comunque in un contesto eccessivamente costruito, che non consente sufficiente visibilità e raggi di curvatura congruenti, ed in presenza di irregolarità plano-altimetriche: essa infatti richiede grandi spazi e terreni pressocchè pianeggianti. Inoltre questo tipo di intersezione, non attribuendo priorità ad alcuna delle strade che si intersecano (essa disciplina ugualmente tutto il traffico entrante), è particolarmente idonea in quelle situazioni in cui tali strade sono dello stesso livello gerarchico. La politica odierna tende a privilegiare le intersezioni a rotatoria a scapito di quelle lineari, poiché queste ultime sono spesso sede di gravi incidenti.
Generalmente nelle intersezioni le manovre più rischiose sono le svolte a sinistra, poiché oltre alla notevole differenza di velocità esistente tra chi svolta e chi prosegue dritto, il pericolo è rappresentato dal fatto che queste due manovre presentano punti di conflitto sotto angoli di 90°. Le rotatorie eliminano di fatto questo rischio, poiché ad ogni ramo d’entrata obbligano la svolta a destra; inoltre, essendo caratterizzate da velocità operative minori, portano ad incidenti meno frequenti e meno severi.
Le rotatorie risultano vantaggiose anche dal punto di vista dei perditempo: infatti l’utilizzo del segnale di “dare precedenza” piuttosto dello “Stop” spesso comporta un perditempo minore ed inoltre, in genere, il perditempo totale risulta inferiore a quello di un incrocio semaforizzato di analoga capacità.
Infatti gli impianti semaforici non autoregolati, durante i periodi di morbida,comportano delle perdite di tempo non necessarie, a causa delle fermate obbligate dei veicoli anche quando non necessarie.
Sulla base di tutte queste considerazioni, nell’ambito di questo studio, abbiamo modificato,ove possibile e conveniente, intersezioni esistenti in rotatorie, al fine di ridurre i punti di conflitto veicolari, migliorando la sicurezza e l’efficienza operativa dell’intersezione stessa.
2.4.2 Criteri geometrici di progettazione di una rotatoria
Per la buona progettazione di una rotatoria, è importante rispettare alcuni criteri geometrici. Ed a tale proposito occorre prima definire una serie di elementi che caratterizzano la geometria di una rotatoria (Figura 2.15):
• Raggio esterno, Re;
• Raggio interno, Ri;
• Larghezza dell’anello di circolazione, b;
• Raggi di curvatura dei bordi in corrispondenza delle entrate, R1 e R3;
• Raggi di curvatura dei bordi in corrispondenza delle uscite, R2 e R3;
• Larghezza dell’ingresso, bi;
• Larghezza di uscita, be;
• Distanza tra un ingresso e l’uscita successiva, misurata tra i vertici delle aiuole sui bracci, d;
• Larghezza dell’isola spartitraffico,s; • Lunghezza dell’isola spartitraffico, L.
Per questi elementi si riporta qui di seguito il campo di variazione, in cui sono più frequentemente compresi:
- Per quanto riguarda il raggio esterno, Re, attualmente si cerca di evitare
rotatorie, con due corsie nell’anello, aventi dimensioni superiori a 60m di diametro per i motivi già detti in precedenza.
- Il raggio interno, Ri, è pari al raggio esterno diminuito della larghezza
dell’anello.
- Per la larghezza dell’anello, b, vengono suggeriti valori compresi fra un minimo di 7m ed un massimo di 12m (non è opportuno superare questo valore, poiché i veicoli si disporrebbero su troppe file, aumentando le interferenze). Generalmente, b = 9.00-10.00m per le rotatorie con due corsie nell’anello e b = 12.00m per le rotatorie con tre corsie nell’anello.
- Per il raggio di curvatura in corrispondenza dell’entrata in rotatoria, R1, i
valori minimi sono compresi fra 15 e 20m; mentre i raggi R3 delle curve di
raccordo, ovvero dove comincia l’allargamento, sono dell’ordine di 200-300m.
- Per il raggio di curvatura in corrispondenza dell’uscita dalla rotatoria, R2,
sono invece opportuni valori un po’ più grandi rispetto a R1, dell’ordine di
20-40m.
- La larghezza dell’ingresso, bi, è pari a 3.50-4.00m nel caso di ingresso ad una
sola corsia; è invece pari a 7.00-8.00m nel caso di ingresso a due corsie. Nel nostro studio, ove possibile abbiamo realizzato ingressi a due corsie, della larghezza di 7.00-7.50m, poiché in questo modo, fornendo ai veicoli in attesa di immettersi nell’anello la possibilità di disporsi in più file, si consente loro di sfruttare in modo più efficace i gap che si presentano nella corrente che percorre l’anello.
- La larghezza di uscita, be, consigliata e più frequentemente adottata è
compresa tra 4.50 e 5.00m. La corsia in uscita è unica, per evitare l’affiancamento di due veicoli, ma tale larghezza permette comunque l’uscita nel caso questa sia occupata da un veicolo in panne. In questo modo si evita l’autosaturazione della rotatoria.
- La distanza d tra un ingresso e l’uscita successiva, misurata tra i vertici delle aiuole sui bracci, dovrebbe essere non minore di 20-30m.
- La larghezza s dell’isola spartitraffico ha notevole influenza sulla capacità del braccio; le sue dimensioni dipendono dalla velocità del ramo di accesso e dal tipo di rotatoria: si passa quindi da valori minimi di 1.00-2.50m per le minirotatorie a valori compresi tra 4.00 e 12.00m per le rotatorie di maggiori dimensioni.
- La lunghezza L dell’isola spartitraffico è di norma pari a 5 volte il valore della larghezza s dell’isola.
Ai fini di una corretta progettazione, inoltre, è molto importante controllare la deflessione delle traiettorie in attraversamento del nodo, ed in particolare le traiettorie che interessano due rami opposti od adiacenti rispetto all’isola centrale. Essendo scopo primario delle rotatorie un controllo assoluto delle velocità all’interno dell’incrocio, risulta essenziale che la geometria complessiva impedisca valori cinematicamente superiori ai limiti usualmente assunti a base di progetto, e cioè velocità massime di 40-50 km/h per le manovre più dirette.
Si definisce in particolare deflessione di una traiettoria il raggio dell’arco di cerchio, che idealmente passa a 1.50m dal bordo dell’isola centrale ed a 2.00m dal ciglio delle corsie di entrata e di uscita (Figura 2.16).
Tale raggio non deve superare i valori di 80-100m, cui corrispondono le usuali velocità di sicurezza nella gestione di una circolazione rotatoria.
Nell’ambito del nostro studio abbiamo realizzato rotatorie, nelle quali il raggio di deflessione risulta abbondantemente al di sotto dei valori massimi sopra riportati: in questo modo le velocità di percorrenza dell’anello sono molto contenute (20-30 km/h) e si garantisce così un’elevata sicurezza.
Figura 2.16 - Traiettoria di deflessione della rotatoria.
2.4.3 Intersezioni a livelli sfalsati
Una intersezione altimetricamente sfalsata è quella in cui due strade si incrociano a quote differenti e sono connesse fra loro da brevi tronchi di strada (denominati usualmente rampe), che consentono il passaggio dei veicoli da una strada all’altra. E’ necessario pertanto almeno un’opera di scavalco: tra il piano viabile sottostante e l’intradosso della struttura sovrastante deve esservi in ogni punto una distanza non inferiore a 5.00-5.50m; la differenza di quota tra le due strade dipende quindi dalla luce e dalla tipologia del manufatto che realizza l’attraversamento, ma è nella maggior parte dei casi compresa fra 6.00 e 7.00m.
Con lo sfalsamento dei livelli si consegue sempre l’eliminazione dei punti di conflitto di intersecazione tra le correnti in transito: infatti le portate dirette, cioè quelle che in corrispondenza dell’intersezione proseguono nella stessa strada, non interferiscono con altre correnti.
Inoltre le manovre di svolta avvengono senza arresti o rallentamenti eccessivi, poiché sono costituite solo da manovre di diversione e di immissione.
Ma uno dei principali vantaggi delle intersezioni a livelli sfalsati consiste nel fatto che le velocità delle correnti in transito di una o di ambedue le strade, in corrispondenza dell’intersezione, rimangono pressocchè invariate e lo stesso si può dire per la qualità della circolazione (livello di servizio) e per la capacità delle strade. Le rampe di connessione, pur avendo forme diverse derivanti dalla necessità di adattarsi a situazioni locali, sono sempre riconducibili a tre tipi fondamentali (Figura 2.17):
- rampa diretta, che consente di eseguire la svolta a destra od a sinistra nel modo più naturale e con il percorso più breve; l’uso di questa rampa per la svolta a sinistra implica l’uscita e l’immissione in sinistra delle carreggiate, nonché lo scavalcamento della carreggiata di senso opposto ed, eventualmente, di altre rampe.
- rampa semidiretta, che consente la svolta a sinistra uscendo dalla destra della carreggiata. Inizia pertanto con una svolta a destra, la quale gradualmente si trasforma in svolta a sinistra.
- rampa indiretta o a cappio, che trasforma la svolta a sinistra in una svolta a destra con angolo al centro di circa 270° e non richiede lo scavalcamento di nessuna corrente di traffico; ha però il difetto di essere molto lunga e poco intuitiva.
Le rampe possono essere monodirezionali (ad una o due corsie) o bidirezionali; in ogni caso la larghezza della piattaforma consente sempre il superamento di un veicolo in avaria.
Le larghezze degli elementi modulari di uno svincolo sono determinate in funzione della strada di livello gerarchico superiore tra quelle confluenti nel nodo; e, facendo riferimento alle “Norme funzionali e geometriche per la costruzione delle intersezioni stradali” (studio a carattere prenormativo), tali larghezze possono essere riassunte nella Tabella 2.4, dove si distingue anche tra strade urbane ed extraurbane.
Tabella 2.4 - Larghezze degli elementi modulari degli svincoli.
Le caratteristiche planoaltimetriche delle rampe devono essere fissate in ordine alla velocità di base dei rami dell’intersezione: anche se alcuni suggeriscono valori intorno al 60-70% delle velocità delle strade che si intersecano, occorre dire che ciò è possibile per le rampe dirette, mentre, soprattutto per quelle a cappio, è opportuno riferirsi a velocità minori, non solo per motivi di costo, ma anche perché l’allungamento dei percorsi vanificherebbe i vantaggi di una velocità elevata.
Si riportano nella Tabella 2.5 i valori delle velocità di progetto consigliate per i vari tipi di rampe, in base ai tipi di strade che si intersecano; mentre nella Tabella 2.6 vengono indicati i valori delle caratteristiche geometriche delle rampe in funzione della velocità di progetto (come suggeriti dalle “Norme funzionali e geometriche per la costruzione delle intersezioni stradali”).
Incroci
Tipi di rampe
A/A; A/B; B/B; A/C; A/E
B/C; B/D; D/E; B/E
Diretta 50-80 km/h 40-60 km/h
Semidiretta 40-70 km/h 40-60 km/h
Indiretta (cappio) 30-50 km/h 30-45 km/h
Tabella 2.5 - Velocità di progetto per i vari tipi di rampe, in base ai tipi di strade che si intersecano.
2.4.4 Progettazione delle rampe di connessione
Avendo le rampe di interscambio la necessità di conseguire non solo una lunghezza adeguata ad una comoda variazione di velocità (in accelerazione o decelerazione), ma anche uno sviluppo che consenta variazioni planimetriche di angolazione intorno a 270°, può risultare in molti casi conveniente contemperare le due esigenze utilizzando il medesimo tratto sia per decelerare sia per iniziare la svolta.
Da qui nasce il raccordo progressivo, nel cui sviluppo ad ogni variazione di velocità corrisponde una variazione di raggio dello stesso segno: ovvero quando la velocità aumenta (rampa di accelerazione) il raggio si incrementa, quando invece la velocità diminuisce (rampa di decelerazione) anche il raggio si riduce.
Volendo una corrispondenza puntuale tra raggio e velocità, si dovrebbe ricorrere a curve di raccordo a variazione continua di curvatura, quali la clotoide, la lemniscata e la parabola cubica.
Nella pratica però si preferisce discretizzare la corrispondenza tra raggi e velocità, ricorrendo a tratti di spirale del tutto equivalenti sul piano funzionale e formale alle predette curve continue. Quindi in planimetria, le rampe vengono realizzate con delle curve a raggio progressivo, dette policentriche.
La policentrica viene costruita mediante il metodo della “spirale a 2 secondi” , il quale consiste nel variare il valore del raggio di curvatura ogni volta che lo sviluppo della curva circolare corrisponde al tempo di percorrenza di 2 secondi da parte del veicolo in variazione di velocità.
La policentrica è quindi rappresentata da una sequenza di archi di cerchio (Figura 2.18), ognuno dei quali è percorso alla stessa velocità per 2 secondi.
Detta v1 la velocità di entrata, ad esempio per una pista di decelerazione, la velocità
di uscita v2 dall’archetto circolare di spirale sarà:
a v v2 = 1−2
dove v1 e v2 sono espresse in m/s
a è la decelerazione, pari al massimo a 2m/s2
La velocità media, v1-2, nel tratto 1-2 considerato, sarà quindi:
a v v v v− = 1+ 2 = 1− 2 1 2 (m/s)
Pertanto lo sviluppo in m dell’arco elementare 1-2 di spirale sarà dato da:
(
v a)
v
s1−2 = 1−2 ⋅2=2⋅ 1 −
Ad esso corrisponde un angolo al centro α1-2 (rad), che è pari a:
1 2 1 2 1 R s− − = α
essendo R1 (m) il raggio dell’arco di cerchio considerato, valutato con la seguente
formula: 5 . 2 2 1 1 v R = con v1 espresso in m/s
In questo modo abbiamo definito il primo elemento di spirale e si prosegue a calcolare il secondo, ponendo:
a v v3 = 2 −2 (m/s) a v v v v − = 2 + 3 = 2 − 3 2 2 (m/s)
(
v a)
v s2−3 = 2−3⋅2=2⋅ 2 − (m) 2 3 2 3 2 R s − − = α (rad) 5 . 2 2 2 2 v R = (m)e così sia fino al valore di raggio minimo della rampa.
Il raggio di entrata o di uscita della rampa deve essere ≥120m.
Nel caso di pista di accelerazione, partendo dal raggio minimo della rampa, si ha la stessa procedura di calcolo, con l’unica variante che nelle formule i segni negativi diventano positivi e l’accelerazione massima vale 1m/s2.