Chapter 6: LAYOUTS
In the following Chapter we will present a first draft version of the layout of the cell. We produced both the “Handle” and the “Electric Valve Group” Layouts, in order to show the little amount of necessary changes required for this test case. In the last chapter we will show all the future needs which will make this cell “Evolvable”.
The components we chose for this test case fulfil all the requires of the Specific Ontology. They are able to carry out the processes because of they have the suitable Skills.
The robot is an ABB IRB 140; with its 6 degrees of freedom (6 rotational axis) it allows to perform all the required action: it is able to reach almost the whole workspace with whichever orientation of the gripper. The payload is also adequate for this application. We put it on the top of the cell’s floor, but it is possible even hang it on the roof in order to earn space underneath. The ABB IRB 140 is a modern robot very easy to agentify: it needs only the right interface.
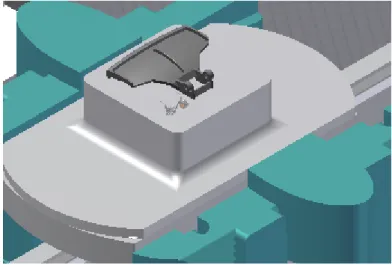
In the previous Chapter we showed the need to feed some components of the Handle (the Spring) and some of the Electric Valve Group (Clamp Ring 1 and Clamp Ring 2) by a Conveyor and a proper Fixture. The Fixture should be designed to deliver the component in the right position for the assembly. We decided to include these special Fixture in the same pallet with the Plastic Handle and the Electric Valve (base objects). This solution leads to a large time and space saving. Keeping shared the fixtures for the base object and for the other component, the solutions would remain Task-Specific.
Fig.128. “Handle” draft fixture.
Figure 129. “Electric Valve Group” Fixture
The Conveyor that we are going to use is manufactured by “Montech” and it is called “Montrac”: our model is called “One-axis shuttle”. To date in KTH workshop we have three shuttle available. As you will see below we made a loop, which crosses the cell. The present
Fig 130. Bulk Feeder.
The last component of the “Handle” layout is the Gripper Warehouse, in the cycle in fact it is necessary to change Gripper, to grab the different objects.
The “Electric Valve Group” Cycle needs two feeder for the tubes. The best solution is probably to feed a continuous roll of tube by a drum and cut it before the usage by a cutter. Both the drum and the cutter must be designed and developed. In the next picture is possible to see a sketch of such a system.
Another necessary component for this configuration is the Oil feeder. Our concepts is basically made by a small tray where is possible to dip the tube into. The dip tray could be designed to remove unnecessary grease on the external surface.
Fig.132. The Dip Tray Concept.
Of course the cell will be shielded by an adequate structure.
As you will see, the layouts are quite similar. To pass from one disposition to the other it is basically enough to change the feeders and to add or to remove the Gripper-warehouse and the Dip Tray. In an “Evolvable” System with proper Interfaces and with all agentified components this sort of “Set-Up” process may lasts few minutes, and even with more complex applications it should take no more than some ours instead of a very long and expensive redesign process.
Fig.134. The “Electric Valve Group” layout.