Capitolo 3
Descrizione della procedura adottata per l’analisi del
prototipo tramite codici CFD
3.1 Introduzione al problema affrontato
Date le crescenti prestazioni dei processori e la riduzione dei costi e dei tempi di calcolo nell’ambito della progettazione dei motori a combustione interna, si va sempre più diffondendo l’impiego di software come strumenti per la valutazione dei processi termofluidodinamici che avvengono all’interno di un motore [24, 25].
Grazie ai codici CFD è possibile simulare gli andamenti dei fenomeni che si instaurano all’interno del motore come ad esempio la turbolenza, il break up e l’evaporazione delle gocce di combustibile iniettato, il miscelamento della carica, la combustione ecc.
Il lavoro svolto in questa tesi tramite codici CFD ha avuto i seguenti obiettivi:
• valutare per varie condizioni di funzionamento (regime e carico) la possibilità di realizzare carica stratificata con la geometria reale del prototipo descritto al Capitolo 2. • valutare l’influenza che dettagli geometrici (forma della testa e del pistone, posizione e
tipologia della candela) esercitano sulla realizzazione della stratificazione della carica. La procedura di lavoro seguita in tutti i modelli esaminati è caratterizzata dalle seguenti fasi:
Geometria: Pro Engineer Ansys Icem CFD (ambiente Geometry) Preprocessore: Ansys Icem CFD (ambiente Hexa) Solutore: Kiva 3V r2 Postprocessore: Open Dx
Il lavoro ha inizio con la definizione della geometria del motore e di tutti i suoi parametri operativi: in questa fase è stato utilizzato il software CAD Pro/ENGINEER 2000i2 in ambiente Windows.
In questa tesi si parlerà di “geometrie di motore” intendendo con questa espressione la modellazione geometrica del dominio di calcolo rappresentato dalla regione fluida.
Mediante il modulo di interfaccia installato su Pro/ENGINEER, denominato Icem Mesh Interface (versione 4.00), la geometria creata a questo livello viene importata, in forma di file di interscambio tetin, all’interno del preprocessore vero e proprio, il modulo Hexa di ANSYS ICEM CFD 4.3.1, operante in ambiente Windows.
Per completare il modello geometrico del motore è stato spesso necessario ricorrere al modulo Geometry di ANSYS ICEM CFD 4.3.1 per la definizione delle famiglie di curve, superfici e volumi richieste dal solutore KIVA 3V.
Nel preprocessore viene creata la griglia computazionale utilizzata dal solutore per effettuare i calcoli.
Il solutore utilizzato è il codice CFD KIVA 3Vr2 compilato in ambiente Windows.
Il passaggio dal preprocessore al solutore avviene dopo aver definito le condizioni al contorno e le condizioni iniziali.
Le condizioni iniziali ed al contorno imposte nelle simulazioni derivano da lavori svolti su motori analoghi e pubblicati dal dipartimento di Energetica dell’Università di Pisa.
I risultati ottenuti dalle simulazioni sono visualizzati con il postprocessore OpenDX, operante in ambiente UNIX.
Di seguito vengono riportate alcune considerazioni in merito alla procedura ed alle semplificazioni effettuate per il disegno e per la creazione della griglia di calcolo.
3.2 Realizzazione del modello CAD del prototipo e semplificazioni
introdotte.
Le varie geometrie analizzate in questa tesi sono state costruite con il software Pro Engineer realizzando metà motore (Fig. 3.1), essendo in tutti i casi la geometria simmetrica e l’iniettore e la candela sul piano di simmetria.
Purtroppo per esigenze legate alla realizzazione della griglia computazionale e per i vincoli imposti al disegno dal solutore Kiva 3v è stato necessario introdurre nel modello CAD delle semplificazioni rispetto alla reale geometria del motore.
Si tratta perciò di valutare gli effetti che tali semplificazioni producono sul comportamento fluidodinamico del sistema.
Figura 3.1 Una delle geometrie realizzate in questa tesi.
3.2.1 Il disegno del pistone
Lo stantuffo del motore reale presenta un piccolo raccordo lungo il bordo superiore del deflettore (Fig. 3.2).
In questa tesi mediante feature di superficie sono state realizzate due geometrie del pistone (Fig. 3.4 e Fig. 3.5) che, per esigenze legate alla meshatura dei modelli, sono state disegnate senza tener conto del piccolo raccordo; è stata introdotta questa semplificazione perchè sarebbe necessaria una mesh molto fitta per seguire la reale geometria dello stantuffo.
Figura 3.4 Geometria del pistone con deflettore integro
Figura 3.5 Geometria del pistone realmente presente sul motore
Dal momento che il solutore Kiva richiede una mesh multiblocco strutturata, un infittimento della griglia computazionale nella zona del deflettore porterebbe ad un notevole incremento nel numero di celle presenti nell’intero modello e quindi ad un appesantimento dei calcoli.
Inoltre si ritiene che un modello del pistone più accurato, che riuscisse a tener conto di tale raccordo non comporterebbe comunque grosse differenze dal punto di vista fluidodinamico rispetto ai risultati ottenuti con la semplificazione introdotta.
Tuttavia è da ricordare che il disegno della camera di combustione deve essere tale da non prevedere spigoli vivi in quanto possibili punti caldi e quindi causa di preaccensioni.
3.2.2 Il disegno dei travasi e dello scarico
I modelli CAD dei travasi e dello scarico sono stati realizzati sulla base di disegni (cartacei) relativi ad un motore in commercio utilizzando feature di superficie di tipo avanzato (Fig. 3.6). Anche il disegno dei travasi presenta lievi differenze rispetto al caso reale: le luci di immissione hanno una sezione rettangolare (Fig. 3.7), senza raccordi tra gli spigoli. Questa semplificazione è
legata ai vincoli imposti dal codice solutore Kiva3v. Tale software presenta infatti la subroutine
snap che simula lo spostamento di un pistone aggiungendo o sottraendo strati di celle dal
dominio di calcolo a seconda che il pistone si muova verso il PMI o il PMS. Nel volume spazzato dal pistone durante le corse di risalita e di discesa ogni strato di celle viene ottenuto dal precedente per traslazione rigida per cui ad ogni livello è necessario avere la stessa distribuzione delle celle.
Figura 3.6 Travaso laterale Figura 3.7 Travaso laterale (File tetin)
Dal punto di vista motoristico le luci con sezione rettangolare producono un lieve aumento del riempimento del motore.
La semplificazione geometrica appena descritta vale anche per la luce di scarico.
3.2.3 Il disegno della testa del motore
In questa tesi sono realizzate due tipologie di testa del motore:
• la prima è il risultato di studi precedentemente condotti presso il Dipartimento di Energetica dell’Università di Pisa (Fig. 3.8 );
Figura 3.8 Geometria semplificata
Figura 3.9 Riproduzione della geometria reale della testa del prototipo
Le candele esaminate in questa tesi sono state disegnate con il solo elettrodo di massa per facilitare la già complessa realizzazione della mesh strutturata nella zona della testa.
3.3 ICEM CFD Pro/ENGINEER Mesher Interface
Il modulo ICEM CFD Pro/ENGINEER Mesher Interface (versione 4.00) permette di esportare il modello creato al CAD nel software di generazione della griglia di calcolo creando il file Tetin (non è quindi necessario utilizzare un file di interscambio (ad es. IGES)).
In generale la procedura adottata a questo livello del lavoro consiste nel:
• disegnare la geometria del modello con Pro/ENGINEER;
•
generare il file di uscita TETIN.La procedura descritta non è strettamente vincolante, visto che il terzo punto potrebbe essere svolto all’interno di Pro/ENGINEER. Tuttavia in questa tesi è risultato agevole operare nel modo descritto anche perché il modulo Geometry di Ansys Icem CFD consente di definire le famiglie necessarie in modo veloce ed intuitivo e permette di eseguire rapidamente eventuali operazioni booleane sulle geometrie.
3.4 Creazione della griglia computazionale: il software Ansys Icem
CFD
3.4.1 Introduzione
Ansys Icem CFD consente di operare con modelli geometricamente complessi, di realizzare griglie computazionali e, per alcuni tra i solutori supportati, permette la visualizzazione dei risultati grazie al modulo di post processamento.
Con questo software è possibile creare griglie parametriche nei seguenti formati: • Multiblocco strutturate;
• Multiblocco non strutturate con generazione semiautomatica ad elementi esaedrici; • Non strutturate con elementi tetraedrici;
• Cartesiane;
• Ibride con elementi esaedrici, tetraedrici, piramidali e prismatici; • Di superficie con elementi quadrilateri e triangolari.
Ansys Icem CFD è organizzato nei seguenti ambienti; • Ambiente file;
• Ambiente geometry; • Ambiente meshing; • Ambiente edit mesh; • Ambiente Output.
Tale divisione in ambienti è strutturata in modo tale da poterla percorrere secondo la sequenza logica da seguire per la generazione della mesh (Fig. 3.10).
Ogni ambiente presenta un’interfaccia user-friendly e tutte le schermate a video si compongono delle seguenti finestre:
1. Main ANSYS ICEM CFD window (Fig. 3.11): è l’ambiente di lavoro;
Figura 3.11 Main window di ANSYS ICEM CFD.
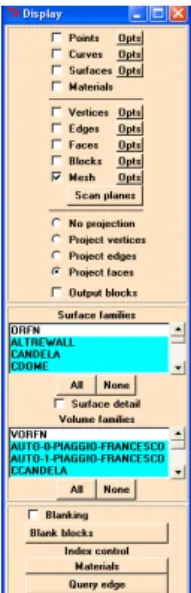
2. Display window: è la finestra che consente di scegliere le entità geometriche da visualizzare sulla Main window (Fig. 3.12);
3. Message window (Fig. 3.13): è la finestra che riporta la sequenza delle operazioni svolte dall’utente.
Figura 2.13 Message window
3.4.2 Ambiente file
L’ambiente file consente all’utente di importare, esportare, aprire e chiudere i file necessari per la realizzazione della griglia computazionale (file di geometria, il file delle condizioni al contorno, il file dei blocchi, il file della mesh) nel formato richiesto dal solutore.
3.4.3 Ambiente geometry
All’interno dell’ambiente Geometry sono presenti tutti gli strumenti che occorrono per creare e/o modificare la geometria. La geometria può essere importata mediante l’utilizzo di file di interscambio (Iges, Step ecc), oppure utilizzando i file generati tramite le interfacce con software CAD (ad es il file Tetin nel caso dell’interfaccia con Pro/ENGINEER).
Il modulo Geometry è stato spesso utilizzato in questa tesi perché molto intuitivo nell’uso e particolarmente adatto a “riparare” le geometrie importate, che possono presentare errori di conversione, ed a creare geometrie di supporto alla generazione della griglia computazionale con semplici operazioni booleane.
L’altra importante funzione di questo modulo è rappresentata dalla possibilità di raggruppare i punti, le curve, le superfici ed i volumi, in famiglie, che rappresentano il corrispettivo dei layer presenti su Pro/Engineer e sono necessarie per la definizione delle condizioni al contorno.
Data la semplicità con cui è possibile raggruppare i vari elementi geometrci, molto spesso in questa tesi sono state create famiglie all’interno di questo modulo.
3.4.4 Ambiente meshing
Il modulo meshing contiene le funzioni per generare la tipologia di griglia computazionale desiderata.
Dati i vincoli imposti dal solutore Kiva3V r2, in questa tesi sono state generate mesh strutturate multiblocco utilizzando il modulo HEXA.
ICEM CFD HEXA è un mestatore che consente di generare griglie multiblocco strutturate o non strutturate con elementi esaedrici se il dominio di calcolo è un volume o con elementi quadrilateri nel caso di superfici.
Di seguito viene brevemente descritta la procedura da seguire per la generazione di una griglia multiblocco strutturata tridimensionale facendo riferimento alla più semplice geometria esaminata in questa tesi (Fig. 3.14):
Figura 3.13 Geometria semplificata
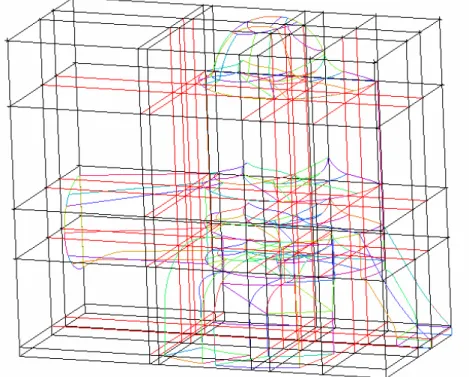
Inizialmente il programma crea automaticamente un solo blocco tridimensionale comprendente tutta la geometria (Fig. 3.15); successivamente tale blocco viene suddiviso in blocchi di dimensione minore a secondo della geometria in esame. La griglia strutturata creata per questa geometria presenta 148 blocchi (Fig. 3.16).
Figura 3.15 Il blocco creato automaticamente dal modulo Hexa di Ansys Icem CFD
Figura 3.16 I blocchi necessari per la realizzazione della mesh strutturata della geometria semplificata
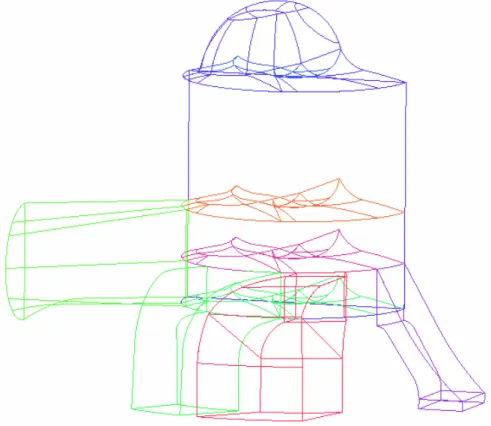
Il passo successivo è l’associazione degli spigoli di ogni blocco alla corrispondente curva da rappresentare spostando i vertici dei blocchi sulle medesime in modo da ottenere una versione approssimata della geometria (Fig. 3.17).
Figura 3.17 Associazione spigoli-curve
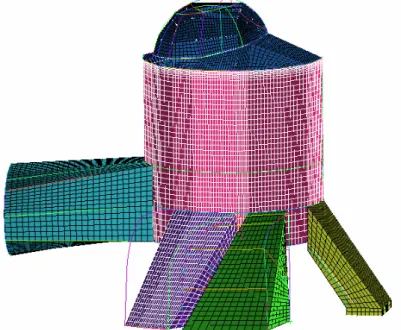
Dopo aver definito il numero di suddivisioni sui i lati dei blocchi e associato le superfici curve dei blocchi a quelle della geometria, il software esegue automaticamente le proiezioni degli spigoli e delle facce dei blocchi su curve e superfici della geometria (Figg. 3.18, 3.19).
Figura 3.19 Mesh della geometria semplificata
La geometria semplificata del motore viene meshata in alcune ore di lavoro. Per geometrie complicate come quelle realizzate in questo lavoro il numero di blocchi necessario per ottenere una griglia strutturata aumenta sensibilmente assieme al tempo necessario a realizzare la mesh. A questo proposito è da notare che nel caso della geometria reale sono necessari circa 350 blocchi.
3.4.5 Ambiente Edit mesh
Generata la griglia computazionale si passa all’ambiente edit mesh. In tale ambiente sono presenti i comandi necessari a controllare e migliorare la qualità della griglia ottenuta.
Ad esempio nell’ambiente edit mesh è possibile eseguire lo smoothing dei domini, funzione che consente di modificare la forma del dominio al fine di migliorare la distribuzione delle celle. Ottenere una buona distribuzione delle celle nel dominio è fondamentale dato che sia la precisione che la velocità con cui vengono effettuati i calcoli sono legate alla qualità del mesh ed alla qualità delle celle, quantificabile come lo scostamento che si registra rispetto alla forma ideale (esaedro perfetto).
3.4.6 Ambiente Output
Ansys Icem CFD 4.3.1 è un meshatore “general purpose” in grado di interfacciarsi con vari solutori.
Le condizioni al contorno da imporre variano a seconda del solutore che si utilizza e nel caso di Ansys Icem CFD vengono assegnate sfruttando le famiglie create nella fase iniziale della creazione del modello di motore.
Una volta scelto il solutore KIVA 3v tra quelli interfacciabili con il meshatore, è necessario assegnare degli appositi flag o identificatori che permettono al solutore di riconoscere le varie parti della griglia; essi sono :
-il flag di vertice (FV)
-il flag che identifica le superfici in movimento (IDFACE)
-il flag che identifica le regioni del cilindro, dei travasi e dello scarico (IDREG) -il flag che specifica le condizione al contorno delle facce delle celle (BCX).
I flag possono riferirsi a superfici o a volumi: quelli di volume sono necessari al software Kiva per poter imporre le condizioni iniziali numeriche e per identificare le regioni le cui celle devono muoversi o rimanere ferme durante il calcolo; la tabella 3.1 riporta le assegnazioni da imporre per le famiglie di volume su Ansys Icem CFD nel caso del motore due tempi esaminato:
FV IDFACE IDREG DOME
5.0 -1 1
BOWL3.0
-1
1
SQUISH4.0
-1
1
TRAVASI1.0
-1
2
SCARICO1.0
-1
3
La famiglia BOWL si riferisce a celle che devono traslare rigidamente con il movimento del pistone come quelle presenti sulla porzione fresata del deflettore del pistone con geometria reale (Fig. 3.20).
Figura 3.20 Mesh della geometria reale del pistone. Il cerchio rosso evidenzia la famiglia di volume bowl.
La famiglia SQUISH (Fig. 3.21), raggruppa le celle posizionate all’interno del cilindro dalla base della testata alla superficie del pistone (esclusa la BOWL). Tali celle sono soggette al
Rezoning, ovvero allo spostamento ed ai tagli o aggiunte di strati di celle verticali durante il
movimento del pistone.
Figura 3.21 Le celle della famiglia Squish Figura 3.22 Le celle della famiglia Dome
Le famiglie di superficie servono invece al solutore per identificare la frontiera del dominio di integrazione, delle equazioni che devono essere risolte, e quindi applicare su questa le opportune condizioni al contorno numeriche.
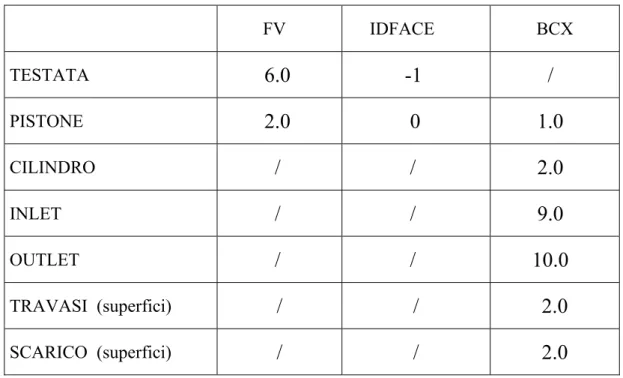
Inoltre il flag IDFACE, permette di far riconoscere al solutore le superfici in movimento, come la superficie del pistone. La tabella 3.2, riporta le assegnazioni da imporre per le famiglie di superfici su Ansys Icem CFD.
FV IDFACE BCX TESTATA
6.0
-1
/
PISTONE2.0
0
1.0
CILINDRO/
/
2.0
INLET/
/
9.0
OUTLET/
/
10.0
TRAVASI (superfici)/ / 2.0
SCARICO (superfici)/ / 2.0
Tabella 3.2: condizioni necessarie e sufficienti da assegnare alle famiglie di superficie
Accanto alle famiglie che identificano le pareti, si hanno le superfici attraverso cui si ha uno scambio di materia con l’esterno del dominio di calcolo che, nel caso in esame, sono rappresentati dai travasi e dallo scarico.
Una volta terminato il lavoro di assegnazione delle condizioni al contorno si può procedere alla creazione automatica del file “itape17” che è il file con cui il solutore Kiva3V acquisisce la griglia computazionale.
3.4.7 Le condizioni al contorno
Le condizioni al contorno sono state ricavate da precedenti studi condotti presso il Dipartimento di Energetica su motori analoghi [20].
3.5 Introduzione al CFD: il codice Kiva 3v
L’analisi dei problemi di fluidodinamica passa attraverso la risoluzione di un sistema composto dalle seguenti equazioni [28]:
-equazione di continuità (conservazione della massa);
-equazioni di conservazione della quantità di moto nelle tre direzioni degli assi; -equazione di conservazione dell’energia;
-equazione di stato delle specie chimiche.
Tali equazioni descrivono il flusso, lo scambio di calore e, tramite le equazioni di conservazione delle specie chimiche, il processo di combustione.
Tale sistema di equazioni può essere risolto numericamente tramite codici CFD conoscendo ovviamente i dati relativi alle caratteristiche dei fluidi presenti (viscosità, conducibilità termica ecc), alle reazioni chimiche che possono dar luogo, le condizioni iniziali ed al contorno.
Per risolvere numericamente il sistema occorre seguire una serie di passi elencati di seguito: -suddividere la geometria in esame in un numero finito di zone di forma prefissata chiamate volumi o elementi a seconda della metodologia di discretizzazione usata.
-la discretizzazione delle equazioni differenziali tramite una combinazione di integrazioni ed approssimazioni che portano ad ottenere un sistema di equazioni algebriche.
-la soluzione del sistema di equazioni algebriche non lineari mediante un algoritmo opportuno. Considerando la griglia computazionale relativa allo studio di un motore è importante che possa conformarsi alla geometria in esame ma anche modificarsi nello spazio e nel tempo tenendo conto del moto del pistone e, nel caso di un quattro tempi, dell’apertura e chiusura delle valvole. Inoltre tale griglia deve essere opportunamente “infittita” in corrispondenza delle zone del dominio di calcolo dove si presentano elevati gradienti in modo da tener conto delle variazioni delle grandezze considerate con buona approssimazione.
Per quanto riguarda la discretizzazione ai volumi finiti, si ha che la forma integrale delle equazioni di bilancio viene risolta in piccoli volumi di controllo, risultato della discretizzazione spaziale del campo fluidodinamico.
Il ricorso alla simulazione numerica tramite codici CFD, in fase di progetto, si rende necessaria laddove la possibilità di eseguire previsioni ed analisi su un elevato numero di casi di studio consente di eliminare, almeno nelle fasi iniziali, la realizzazione di numerosi prototipi. Nella pratica, questo strumento di simulazione è in grado di fornire risposte coerenti con la realtà, in tempi e costi decisamente ridotti rispetto a quanto necessario per realizzare la sperimentazione fisica.
Un altro grande vantaggio della CFD è l’indipendenza rispetto al fattore di scala: questo permette l’eliminazione dei problemi, a volte molto importanti o di difficile e soprattutto costosa risoluzione, di visualizzazione dei parametri fluidodinamici nella simulazione su prototipi reali. Il modello geometrico da analizzare al computer viene realizzato definendo le superfici che racchiudono il dominio di fluido da esaminare.
Il programma utilizzato in questo lavoro è il Kiva3V, un codice CFD tridimensionale sviluppato dall’ente per la ricerca pubblica americana presso i laboratori di Los Alamos.
Il codice Kiva3V è un software open source, ovvero il codice sorgente è liberamente reperibile in rete e, non essendo coperto da copyright, può essere modificato a piacimento, risultando molto versatile [22]. Questa è una delle ragioni che ne ha favorito la diffusione soprattutto nell’ambito della ricerca universitaria.
Insieme al codice vengono forniti anche un preprocessore, denominato K3PREP, ed un postprocessore, denominato K3POST; questi due moduli presentano forti limitazioni e consentono di trattare casi di modesta complessità.
Il codice Kiva3V è un software in grado di risolvere numericamente flussi non stazionari bidimensionali e tridimensionali, sia laminari che turbolenti, di tipo monofase o multifase dispersi, in condizioni supersoniche o subsoniche [21]. Di seguito vengono riportate le equazioni utilizzate dal Kiva3V; per approfondimenti ci si può riferire alle pubblicazioni [21, 22]:
• Equazione di continuità di massa in forma differenziale;
m
s
m
m
m
m
m
D
f
t
ρ
ρ
δ
ρ
ρ
ρ
ρ
&
&
+
+
⎥
⎦
⎤
⎢
⎣
⎡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∇
⋅
∇
=
⋅
∇
+
∂
∂
)
(
• Equazione della quantità di moto in forma differenziale;
)
(
3
2
)
(
)
(
K
g
F
p
uu
t
u
ρ
σ
s
ρ
ρ
ρ
+
∇
⋅
=
−∇
+
∇
⋅
+
+
−
∇
∂
∂
• Equazione dell’energia interna in forma differenziale;
∂
(
∂
ρ
t
e
)
+
∇
⋅
(
ρ
ue
)
=
−
p
∇
⋅
u
−
∇
⋅
J
+
ρε
+
Q
& +
c
Q
&
s
• Equazione della turbolenza modello RNG k-ε in forma differenziale;
(
)
[
s]
s rW
C
C
u
C
C
k
P
u
p
u
k
C
C
C
C
ue
t
&
+
−
∇
−
+
⎥
⎦
⎤
⎢
⎣
⎡
∇
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
⋅
∇
+
⋅
∇
⎟
⎠
⎞
⎜
⎝
⎛
−
+
∇
⋅
−
=
⋅
∇
+
∂
∂
ρε
σ
ε
ε
µ
ε
ε
µ
ρ
ρε
ε
η
ε
ε
η
ε
ε
2 1 3 1:
3
2
3
2
)
(
)
(
Per la chiusura del sistema è necessario aggiungere una relazione tra le variabili termodinamiche ovvero, l’equazione di stato dei gas.
La procedura di calcolo implementata nel KIVA richiede la discretizzazione dello spazio e del tempo. Per lo spazio viene impiegato il metodo dei volumi finiti (ALE), mentre il tempo di simulazione viene suddiviso in time-steps.
Nel metodo ALE (Aritrarian Lagrangian Eulerian) il volume di controllo è costituito dalla cella, mentre le leggi di conservazione sono applicate per determinare le variabili del flusso, in alcuni punti discreti delle celle, detti vertici; si parlerà di vertici, per le componenti della velocità del gas, di centri per le variabili termodinamiche (pressione, temperatura, densità).
Le equazioni, discretizzate con il metodo dei volumi finiti, sono di tipo algebrico non lineare e vengono risolte con un adeguato algoritmo numerico di natura iterativa.
• Fase A) LAGRANGIANA: le celle si muovono con la velocità del campo di flusso (non c’è convezione tra celle adiacenti).
In questa fase si calcolano le nuove posizioni di tutti i pacchetti di gocce in base alla loro velocità e posizione che occupavano all’inizio del ciclo.
Le gocce scambieranno massa, quantità di moto ed energia con il gas della cella in cui si trovano.
In tale fase si calcola il breakup, la collisione, la coalescenza, l’evaporazione e la combustione, ovvero i termini sorgente delle equazioni di conservazione dell’energia e di massa della fase gassosa dovuti alla chimica ed allo spray.
• Fase B: in tale fase si calcola il gradiente della pressione nell’equazione della quantità di moto, si calcolano i termini di diffusione di massa, quantità di moto ed energia ed i termini sorgente per le equazioni di turbolenza.
• Fase C: il campo di flusso è congelato e si ha la rimappatura in una nuova griglia computazionale; stavolta si considera il fenomeno della convezione.
I termini di diffusione vengono calcolati con un metodo di soluzione implicito con intervallo di tempo “dt” variabile per ridurre i tempi di calcolo. I metodi impliciti sono incondizionatamente stabili (la stabilità non dipende dal “dt”) ma devono soddisfare delle condizioni di accuratezza affinché si ottengano dei risultati con un errore tecnicamente accettabile. Queste condizioni vengono rispettate dal programma scegliendo all’inizio di ogni time step il dt di quel ciclo di calcolo tale da consentire il calcolo con una precisione accettabile per la cella che si trova nelle condizioni peggiori in relazione al gradiente di velocità all’apertura dello scarico e dei travasi, alla distorsione ed in relazione allo scambio di massa, di energia, e di calore che si ha durante lo spray e la combustione. Si comprende quindi quanto sia importante generare una griglia di calcolo di qualità, che non presenti celle troppo distorte che farebbero aumentare notevolmente il tempo di simulazione anche in relazione al fatto che, se non si ha a che fare con processi quali lo spray o la combustione, generalmente la condizione più restrittiva sul “dt” è proprio quella legata alla distorsione delle celle.
I termini convettivi vengono calcolati invece con un metodo esplicito. Per garantire la stabilità del metodo deve essere quindi rispettata una condizione sul dt. Qualora il dt risulti inferiore a quello calcolato per i termini di diffusione, il dt per i termini di convezione del ciclo di calcolo viene diviso in sottocicli.
3.5.1 Struttura del programma
Il software è organizzato in un certo numero di subroutines (o comunemente, routines), ognuna delle quali svolge un compito ben preciso (ad es. iniezione del combustibile, evaporazione del combustibile, la combustione ecc) [26].
Alla struttura del Kiva 3V fa capo un “main program” che, ad ogni ciclo di calcolo, richiama le varie subroutines in un ordine preciso, in modo da eseguire i calcoli necessari a risolvere le equazioni del problema termofluidodinamico.
Le routines sono scritte in Fortran 90 e sono completamente modificabili, questo significa che è possibile introdurre nuove stringhe di programma e/o variare la sequenza di operazioni che il software dovrà eseguire.
Una volta modificate le routines, viene compilato un file eseguibile che compie le operazioni richieste dalla simulazione.
Il codice necessita, come detto nel paragrafo precedente, di una discretizzazione spazio temporale del dominio di calcolo; inoltre, è necessario fornire al programma tutte le condizioni iniziali ed al contorno, con cui far partire le simulazioni. Tali informazioni vengono fornite al software tramite due differenti files, chiamati itape5 e itape17, che contengono tutti i dati necessari.
In Fig.3.23 è riportato lo schema del funzionamento del Kiva3V.
I files di uscita (tape 9) vengono creati alla fine della simulazione, oppure, se specificato nel file di input itape5, ad un opportuno angolo di manovella, mentre i files otape8 vengono creati ogni numero prefissato di cicli e servono per avere dei punti di ripartenza per i calcoli qualora ve ne sia necessità.
Per l’esecuzione di una simulazione, come quelle che verranno illustrate nel seguito di questa trattazione, sono necessari solo i tre file riportati nello schema di Fig. 3.23 (itape17, itape5, eseguibile).
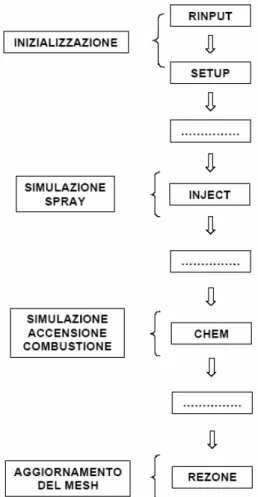
Si riporta inoltre uno schema della sequenza di richiamo, da parte del main program del Kiva3V, nella quale compaiono soltanto le principali routines (Fig. 3.24):
Fig. 3.23 - Schema di massima del funzionamento del programma Kiva3V
Fig. 3.24 Sequenza delle principali routine del Kiva 3v r2
FILE DI GRIGLIA
CONDIZIONI AL
CONTORNO
ITAPE 17
ITAPE 5
ESEGUIBILE
FILE DI USCITA
TAPE 9
OTAPE 8
La routine rinput legge i dati di ingresso e calcola le rispettive quantità scalari. E’ in grado di trattare dati forniti in forma tabellare e di rilevare gli errori nella definizione dei dati ingresso (definiti nel file itape5).
La routine setup è probabilmente la principale del codice Kiva3V. E’ adibita a leggere il file itape17, ad inizializzare tutte le quantità associate alle celle ed ai vertici che saranno utilizzate nel corso dei calcoli ed a rilevare gli errori nelle condizioni al contorno geometriche (pareti ferme, pareti mobili, simmetria…) commessi durante il processo di generazione della mesh. Per quanto riguarda la routine inject, questa è adibita alla simulazione della fase di iniezione del combustibile.
Nella routine chem sono presenti gli algoritmi di simulazione delle fasi di accensione e combustione.
Infine la routine rezone provvede ad aggiornare la geometria per ogni time step, tenendo conto del movimento dello stantuffo e di eventuali valvole.
35.1.1 La griglia computazionale: il file itape17
La discretizzazione spaziale si basa sul metodo dei volumi finiti ed è affidata ad un unico file che contiene tutti i dati ed i riferimenti riguardo il dominio di calcolo: il file itape17.
3.5.1.2 Le condizioni al contorno: il file itape5
Il codice Kiva3V necessita come input, oltre alla griglia, del file itape5 contenente i dati di ingresso. Itape5 è un file di testo non formattato che riporta in sequenza le variabili operative (costanti dei modelli di breakup, di iniezione, di combustione e di formazione di inquinanti ecc) e parametri motoristici (corsa, alesaggio, altezza di squish).
Il file itape5 contiene le informazioni che riguardano la discretizzazione temporale che è affidata ad una suddivisione in time steps dell’intervallo di tempo relativo alla simulazione. Si riporta in Fig. 3.25 uno schema del file itape5 con i parametri più importanti settati in questa tesi.
Fig. 3.25 I principali parametri utilizzati in questa tesi. Accanto a questi sono da ricordare i parametri relativi al
posizionamento ed alle caratteristiche dell’iniettore.
3.5.1.3 I risultati della simulazione: il file tape9
Il file tape9 è un file di testo contenente al suo interno i risultati della simulazione effettuata; terminata la fase di calcolo, i risultati non sono immediatamente utilizzabili e devono quindi essere postprocessati con un opportuno programma (per questo studio è stato utilizzato il software OpenDX, operante in ambiente UNIX).
In seguito verranno riportate visualizzazioni relative agli andamenti del campo di moto e delle mappe del rapporto di equivalenza.