(d)
MODELLO SIMULINK DEL CHOPPER
Nel capitolo successivo è riportato il modello del sistema costituito da:
• Chopper ad IGBT a legame diretto. Viene simulato sia il comportamento elettrico globale del ponte, sia il comportamento termico di ogni singolo tasto del ponte, di ogni singolo diodo in antiparallelo agli IGBT, del ponte a diodi di raddrizzamento della terna trifase, ed anche il comportamento del dissipatore.
• Motore DC a magneti permanenti, eccitazione serie
• Controllo digitale attraverso il
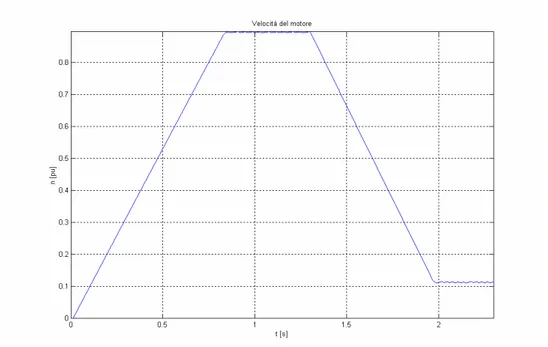
PIC16F877A, che implementa un regolatore di velocità Proporzionale-Integrale, ed un anello di corrente ad isteresi a 3 livelli
• La retroazione di velocità, attraverso un encoder incrementale ed un contatore di impulsi a bordo del PIC
• La retroazione di corrente, attraverso un trasduttore di corrente ad effetto Hall, con rapporto 1:1000, la cui corrente di uscita portata attraverso una resistenza da 56,2Ohm, 1%; la tensione anodica della resistenza costituisce il segnale di tensione proporzionale alla corrente di armatura, e che viene campionato attraverso il modulo ADC a bordo del PIC.
• La terna di alimentazione trifase, il ponte a diodi ed il condensatore di filtro.
Dopo il modello sono riportati i grafici di simulazione relativi alla velocità del motore, alle grandezze elettriche del sistema chopper motore, e del comportamento termico dei singoli componenti.
A seguire è riportato il modello Simulink di un ponte trifase ad SCR, che è stato simulato per verificarne le prestazioni e per ottenere un metro di paragone delle prestazioni del chopper.
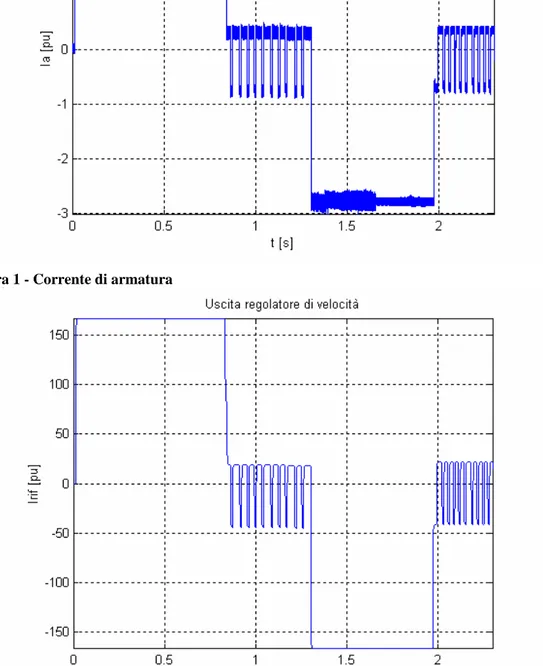
I grafici di simulazione riportano le grandezze fisiche meccaniche, elettriche e termiche del sistema in ciclo di lavoro che fa partire il motore da fermo, gli fa raggiungere la velocità nominale e poi rallenta fino al 300rpm. Il motore è a vuoto meccanico.
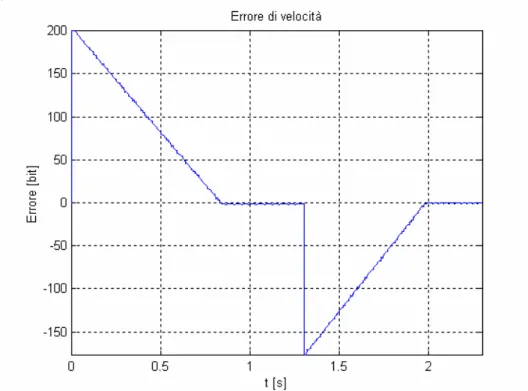
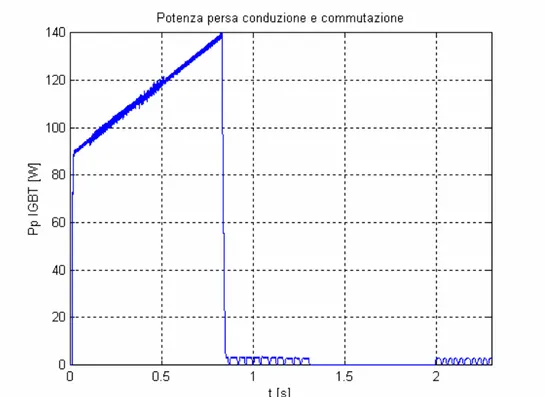
Dalle simulazioni si nota come l’azionamento si comporti correttamente al variare della velocità di riferimento definita dall’operatore. Infatti il controllo digitale pilota il motore facendolo accelerare e decelerare con overshoot praticamente nullo, e con errore di velocità praticamente nullo. Dai grafici termici si verifica che ogni componente simulato opera nel rispetto delle temperature massime operative, grazie alle limitazioni di corrente imposte, via software, in uscita al regolatore di velocità, e grazie anche al corretto dimensionamento del dissipatore.
I comportamenti termici sono ricavati da modelli molti accurati dei componenti discreti a semiconduttori, estrapolati in modo fedele dalle curve di comportamento non lineari riportate dai datasheet dei tasti di potenza e del ponte a diodi.
Figura 1 - Corrente di armatura
Figura 3 - Errore di corrente in bit
Figura 4 - Velocità del motore in pu (1pu = 3000rpm)
COMPORTAMENTO TERMICO DEI COMPONENTI
Figura 6 - Temperatura di giunzione degli IGBT
Figura 7 - Potenza termica dissipata sui tasti IGBT
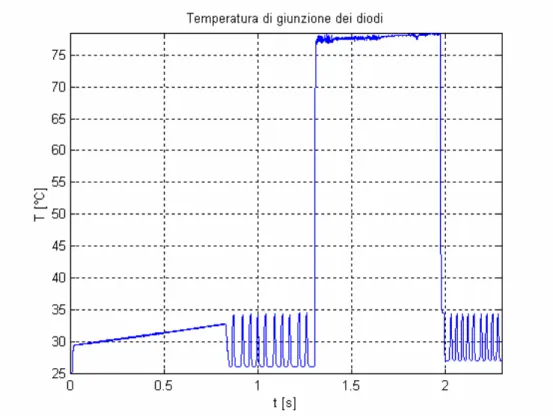
Figura 8 - Temperatura di giunzione dei diodi in antiparallelo agli IGBT
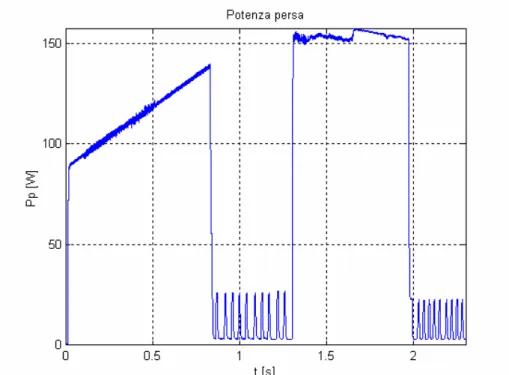
Figura 10 – Potenza persa totale dal modulo IGBT con diodi in antiparallelo
Figura 11 - Temperatura sul case
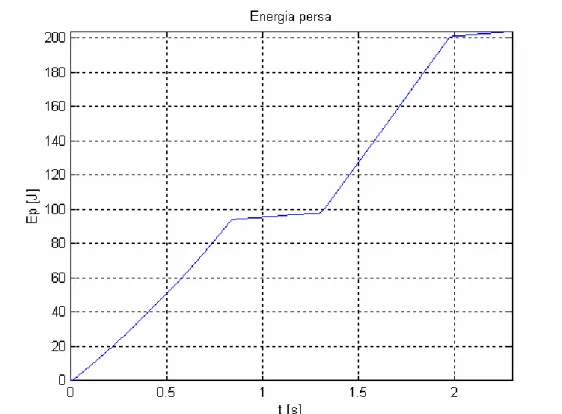
Figura 12 - Energia termica dissipata totale in Joule
Figura 13 -Salto termico sul dissipatore che dissipa la potenza del modulo ad IGBT e del ponte a diodi raddrizzatore