12. SISTEMI A REALTÀ AUMENTATA
Accanto ai metodi di addestramento tradizionali si stanno attualmente sviluppando e perfezionando metodologie che, sfruttando recenti innovazioni tecnologiche, permetteranno di ridurre tempo e risorse spese nell’addestramento del personale operativo quali manutentori, tecnici ed operatori.
Le tecniche che si avvalgono di supporti grafici sono ovviamente le più sperimentate, vista la quantità di informazioni condensabile in un’unica immagine unita alla più semplice comprensibilità dello strumento grafico rispetto a quello scritto. Lo sviluppo delle moderne interfacce grafiche ha consentito una notevole semplificazione dell’uso dei software, permettendo anche a chi non era esperto di programmazione di avvicinarsi al mondo dei computer. Allo stesso modo, simulazioni ed animazioni visualizzate su uno schermo possono costituire, per l’addestramento di un operatore o per il supporto tecnico di un manutentore, uno strumento più efficace di un’istruzione scritta o di un manuale.
La realtà aumentata (AR: Augmented Reality) si pone come un evoluzione del concetto di simulazione grafica nella quale le informazioni non vengono visualizzate in un mondo virtuale ricreato sul PC, ma vengono elettronicamente integrate al mondo reale. L’utente percepisce l’ambiente come chiunque altro, ma è supportato, nello svolgimento dei propri compiti, da informazioni sotto forma di testo, disegni e video generate da un computer e sovrapposte al suo campo visivo.
Tale metodologia di integrare mondo reale e mondo virtuale è, inconsapevolmente, già presente nella vita comune. Le grafiche sovraimpresse alla moviola di un’azione di calcio, che mostrano traiettorie del pallone e nomi degli attaccanti, possono essere un semplice esempio di questa metodologia (vedi figura 12.1). Un altro esempio è costituito dalle previsioni meteo: generalmente il giornalista si trova di fronte ad uno schermo verde o blu. Attraverso una tecnica, conosciuta come “chroma keying”, vengono aggiunte le animazioni all’immagine ripresa dalla telecamera, mostrando così la grafica meteo al fianco del giornalista.
Sistemi a realtà aumentata
La ricerca nel campo industriale è interessata a tali tecnologie, che offrono ampie possibilità di applicazioni per differenti scopi: riduzione degli errori umani, miglioramento dell’accuratezza, riduzione dei tempi di istruzione degli operatori.
12.1 Tecnologie di Realtà Aumentata
Si riporta in seguito una breve descrizione delle tecnologie attualmente disponibili od in via di sviluppo [2].
12.1.1 Panoramica sui sistemi di visualizzazione
I sistemi di visualizzazione sono delle particolari attrezzature che, attraverso componenti ottiche, elettroniche e meccaniche, generano un'immagine posta tra l'occhio dell'osservatore e l'oggetto fisico presente nell’ambiente. A seconda dell'ottica utilizzata, l'immagine potrà essere proiettata su un piano o su una, più complessa, superficie non piana.
La figura 12.2 mostra diverse superfici che possono essere utilizzate per proiettarvi l’immagine desiderata. A seconda della posizione relativa tra utente ed ambiente reale si distinguerà tra le tre principali tecnologie utilizzate: head-attached, hand-held e spatial.
Fig. 12.2: Classificazione dei sistemi di visione
I sistemi di visualizzazione solidali alla testa dell'osservatore (head-attached), come ad esempio i retinal dislplays, gli head mounted displays (HMD) e gli head mounted projectors, devono essere indossati dall'osservatore. Altri tipi di display sono invece hand-held, cioè tenuti tra le mani
dall'osservatore, come nel caso in cui si utilizzi come sistema di visualizzazione i moderni cellulari o palmari. Infine la terza categoria comprende quei sistemi che sono allineati spazialmente tra l'osservatore e l'oggetto reale, e sono così separati dall'utente. Questi fanno generalmente uso di videoproiettori ed apposite superfici su cui visualizzare l’immagine come specchi semiriflettenti o superfici retroriflettenti.
La maggior parte dei display, comunque, formano immagini su piani che possono essere o solidali alla testa dell'utente o allineati spazialmente. Da notare che non sarà possibile formare immagini dietro l'oggetto reale nel caso in cui il display sia posizionato di fronte all'oggetto reale.
Si riporta di seguito una lista dei differenti tipi di display utilizzati per la realizzazione di sistemi di realtà aumentata.
12.1.2 Head-Attached Displays
Negli head-attached displays il sistema di visualizzazione è indossato dall'utente sulla sua testa. Si possono distinguere tre tipologie principali di display, che si differenziano per la tecnologia di generazione dell'immagine:
- Head-mounted displays; - Retinal displays;
- Head-mounted projectors.
12.1.2.1 Head-Mounted displays
Gli Head-mounted displays (HMDs) sono attualmente i sistemi più utilizzati nelle applicazioni di realtà aumentata. Il termine stesso "realtà aumentata" nasce durante gli studi, svolti da scienziati della Boeing [3], che cercavano di sviluppare un sistema, basato su visori fissati al capo dell'utilizzatore, che aiutasse gli operai a montare i cablaggi dei collegamenti nei grossi aerei di linea (vedi figura 12.3).
Sistemi a realtà aumentata
Attualmente esistono due tecnologie, negli HMD, per sovrapporre grafiche virtuali alla visione che l'utilizzatore ha del mondo reale:
- Video see-through head-mounted displays (VST); - Optical see-through head-mounted displays (OST).
I sistemi VST usano due telecamere, una per ciascun occhio, con le quali acquisiscono l'immagine reale. Un sistema computerizzato fonde le immagini reali con quelle di sintesi, e le invia agli occhi tramite due piccoli schermi montati di fronte agli occhi dell'utente (vedi figura 12.4).
Fig. 12.4: Video see-through display
Si riporta di seguito un esempio di sistema VST (figura 12.5). Si notano i due obiettivi delle telecamere, installate all’altezza degli occhi dell’utente per rendere la percezione dell’ambiente il più possibile vicina a quella ottenibile ad occhio nudo. La figura mostra anche le elevate prestazioni grafiche che si possono ottenere con questa tecnologia.
Fig. 12.5: Visore VST ed esempio di grafica ottenibile
I sistemi OST impiegano un divisore di fascio ottico (beam splitter), consistente in uno specchio translucido che emette la luce in una direzione e contemporaneamente la trasmette in un'altra. Orientato correttamente davanti all'occhio dell'utente, il divisore di fascio può riflettere l'immagine di un display e porla sulla linea visiva dell'utente permettendo contemporaneamente il passaggio della luce proveniente dal mondo circostante (vedi figura 12.6).
Sistemi a realtà aumentata
Fig. 12.7: Visore OST e esempi di grafiche ottenibili
Entrambi i sistemi, VST o OST, così come tutti i sistemi head attached display, permettono all'utilizzatore di ricevere le informazioni necessarie allo svolgimento del suo compito senza la necessità di interromperlo per reperirle. Poiché infatti le mani sono lasciate libere e le immagini digitali sono artificialmente sovrapposte all’ambiente reale, l’utente potrà maneggiare gli strumenti a lui necessari ed evitare di distogliere lo sguardo dall’oggetto del proprio lavoro. Un manutentore, ad esempio, potrà tenere continuamente sotto controllo schemi e disegni tecnici dei macchinari su cui sta lavorando, oppure un chirurgo potrà mantere sotto costante monitoraggio i parametri vitali del paziente senza distogliere lo sguardo dal proprio lavoro, addirittura sovrapponendo all'immagine del paziente una ecografia 3D o TAC aggiornata in tempo reale.
Gli HMD presentano però alcuni svantaggi che ne rendono difficoltosa l'applicazione su larga scala:
- Scarsa risoluzione, dovuta a limitazioni proprie dei display miniaturizzati utilizzati. Nel caso di OST, soltanto la grafica sovraimpressa soffre di bassa risoluzione, mentre l'ambiente reale può essere percepito nella risoluzione propria dell'occhio umano. Nei sistemi VST, invece, sia l'ambiente che la grafica aggiunta vengono percepiti nella risoluzione della sorgente video.
- Campo visivo ristretto dovuto alle limitazioni delle ottiche utilizzate.
- Sistemi hardware utilizzati talvolta pesanti e poco confortevoli, che permettono di ottenere immagini di bassa qualità.
- Problemi di percezione visiva dovuta alla profondità costante dell'immagine visualizzata. Nel caso di OST, dato che gli oggetti dell'ambiente reale ed il piano su cui è proiettata l'immagine sono visibili a differenti profondità, l'occhio è costretto a
spostare continuamente la focalizzazione tra due profondità differenti, senza riuscire a percepire chiaramente le due informazioni in contemporanea. Tale problema è noto come il "problema della lunghezza focale fissa". Nel caso di VST questo difetto non è presente, dato che esiste soltanto un piano di focalizzazione, cioè quello dello schermo. D’altro canto, poiché con i VST l’ambiente è percepito ad un’unica distanza focale, questi creano problemi dati dalla difficoltà di muoversi in uno spazio bidimensionale. - Calibrazione e tracciamento: i sistemi OST richiedono difficoltose procedure di
calibrazione, variabile a seconda dell'utente; inoltre è necessario un sistema, estremamente preciso, che identifichi, istante per istante, la posizione della testa dell’osservatore (sistema di tracciamento o traking), per assicurare una corretta sovrapposizione della grafica aumentata all'ambiente reale. Nel caso di VST la grafica viene posizionata sull'immagine acquisita dalle telecamere con errori pari alla risoluzione degli schermi, ma l'elaborazione delle immagini richiede notevole potenza di calcolo, provocando un ritardo nella visualizzazione.
- Scarsa ergonomia di entrambi i sistemi, data dal ritardo nell'aggiornamento dell'immagine proiettata, specialmente durante veloci movimenti della testa. Se usati per lungo tempo possono dare senso di nausea.
- I sistemi OST convenzionali sono incapaci di realizzare un efficace effetto di occlusione tra gli oggetti reali e virtuali, cioè le grafiche proiettate non riescono ad escudere completamente l’immagine dell’ambiente. Questo a causa dell'interferenza tra la luce proveniente dagli schermi miniaturizzati, riflessa dai divisori di fascio ottico, e la luce trasmessa dall'ambiente reale.
12.1.2.2 Retinal displays
I Retinal displays (RDs) utilizzano laser a semiconduttori a bassa potenza per proiettare immagini, scandite da un'apposita unità, direttamente sulla retina dell'occhio umano, invece di piazzare uno schermo di fronte agli occhi. In questo modo si produce un'immagine più chiara e ad alta risoluzione, con un campo visivo potenzialmente più ampio di quello ottenibile con uno schermo. La figura 13.8 riporta uno schema di funzionamento dei Retinal Displays.
Sistemi a realtà aumentata
Fig. 13.8: Schema di funzionamento dei Retinal Displays
I vantaggi di questi sistemi sono:
- Risoluzione: i RD producono immagini ad alta risoluzione. La risoluzione ottenibile è limitata soltanto dalla diffrazione e da deformazioni ottiche nella sorgente di luce, e non da quanto piccolo può essere fatto un singolo pixel.
- Contrasto: la luminosità di un RD può essere aumentata fino ad alti livelli così come diminuita fino a bassissimi livelli. Il contrasto ottenibile è quindi molto alto, ed assai più grande di quello ottenibile da un pannello di proiezione o da un monitor a tubo catodico. - Luminosità: i display elettronici convenzionali non emettono una gran quantità di energia
luminosa. Per questo motivo, sono soprattutto usati in ambienti a luminosità controllata, e sono difficilmente utilizzabili in ambienti ad alta luminosità come gli esterni. I RD, funzionando in modalità see-through, possono essere regolati in modalità automatica in modo che la luminosità si adatti a quella dell'ambiente di impiego.
- Gamma di colori: tubi catodici e schermi di proiezione riflettono soltanto una porzione della gamma di colori visibile dall'occhio umano, e possono raggiungere un limitato grado di saturazione. Dato che le sorgenti di luce rosse, verdi e blu, utilizzate nei RD, emettono colori puri altamente saturati, i RDs permettono di ottenere colori con gamma e fedeltà superiore a quella ottenibile con ogni altra tecnologia.
- Consumo energetico: gli schermi a retroproiezione ed i tubi catodici non riescono a convertire l'energia elettrica in energia luminosa in maniera efficiente, quindi molta dell'energia utilizzata viene sprecata. Per questo possono essere considerati tra i più famelici consumatori di batterie dei dispositivi portatili. Dato che gran parte dell'energia viene dispersa, la luminosità ottenibile è relativamente bassa. La tecnologia utilizzata nei RD, invece, teoricamente convoglia tutta la luce generata sulla retina, consentendo di ottenere elevate luminosità con il minimo consumo di energia.
In contrapposizione a questi vantaggi, tali sistemi condividono le problematiche individuate per gli HMD. Presentano inoltre i seguenti difetti:
- Non si ha il senso della messa a fuoco, dato che si elude il sistema motorio di regolazione dell'occhio effettuando una scansione direttamente sulla retina. Per tale motivo la lunghezza focale è fissa.
- Tali sistemi sono tuttora per lo più allo stadio prototipale, e la commercializzazione è frenata dai pericoli insiti nel proiettare un fascio laser direttamente nell’occhio dell’utilizzatore.
- Attualmente non esistono versioni stereoscopiche di RDs.
12.1.2.3 Head-Mounted projectors
Gli HMP possono essere divisi in head-mounted projective displays e projective head mounted
displays.
I primi deviano il fascio di luce proiettata con un divisore di fascio ottico (vedi figura 12.9), così che l'immagine sia diretta verso superfici retroriflettenti, collocate di fronte all'utente.
Fig. 12.9: HM projective display
Una superficie retroriflettente è costituita da migliaia di piccoli grani. Dato che ogni grano ha la proprietà ottica di riflettere la luce lungo la sua direzione di incidenza (vedi figura 12.10), tali superfici riflettono le immagini più chiaramente che le normali superfici che diffondono la luce. Un osservatore situato sulla sorgente luminosa riceverà quindi più una maggior quantità di luce, ricevendo un'immagine particolarmente chiara. I materiali retroriflettenti sono piuttosto comuni e
Sistemi a realtà aumentata
Fig. 12.10: Superficie retroriflettente
I projective head mounted displays proiettano l'immagine generata su un soffitto regolare, piuttosto che su speciali superfici che si trovano di fronte all'utente. Due specchi semiriflettenti sono utilizzati per intergare l'immagine proiettata nel campo visivo dell'utilizzatore.
Gli HMP presentano i seguenti vantaggi:
- Rispetto agli HMD permettono di avere un più ampio campo visivo senza la necessità di applicare lenti che ne diano una distorsione.
- Prevengono incorrette distorsioni di parallasse, causate dall'errata distanza interpupillare (cioè la distanza tra le pupille degli occhi) dovuta ad una scorretta posizione dell'HMD (ad esempio se si spostano leggermente dalla posizione per cui sono stati regolati).
Hanno però i seguenti difetti:
- gli attuali dispositivi sono ingombranti e scomodi;
- i proiettori miniaturizzati usati in questi sistemi hanno scarsa risoluzione e brillantezza; - gli head-mounted projective displays necessitano di speciali superfici su cui proiettare
perchè si possano ottenere immagini chiare;
- per i projective head-mounted displays la luminosità dell'immagine dipende dalle condizioni di luce dell'ambiente;
- i projective head-mounted displays possono essere usati soltanto in ambienti chiusi, dato che necessitano della presenza di un soffitto.
12.1.2.4 Il problema del tracking
Un fattore fondamentale per lo sviluppo e diffusione dei sistemi a realtà aumentata del tipo HM è la creazione di efficienti sistemi di tracciamento o tracking. Questi sono utilizzati per conoscere l'esatta posizione della testa dell'utilizzatore rispetto all'ambiente circostante, consentendo di modificare l'immagine sovraimpressa in base alla posizione dell'osservatore. Per misurare il moto a 6 gradi di libertà sono stati sviluppati vari tipi di sistemi, che generalmente usano sensori, posti sugli oggetti in movimento, e punti di riferimento, posti nell'ambiente. I sensori generalmente utilizzati sono del tipo a ultrasuoni, ottici o elettromagnetici e hanno il compito di misurare, istante per istante, la distanza da punti di riferimento predefiniti, individuando così la posizione nello spazio del caschetto.
In particolare usando sistemi ibridi, cioè che combinano l’utilizzo di differenti tecnologie di tracking, è possibile aumentare di molto la precisione della misura, fino ad arrivare, nei sistemi più sofisticati, a precisioni di millimetri.
Per sistemi utilizzati all'aperto, il miglior sistema di tracking disponibile è il GPS (Global Positioning System). Il GPS ha però un intrinseco limite nell'accuratezza della misura per cui è necessario utilizzare accelerometri e giroscopi per incrementare la precisione della rilevazione: si dovrà quindi usare un sistema ibrido. Con la messa in orbita del sistema di geo-localizzazione europeo Galileo, prevista per i prossimi anni, sarà possibile ottenere performarce di livello notevolmente superiore senza usare sistemi ibridi.
12.1.3 Hand-Held Displays
Tipici esempi di hand-held dispays sono i PDA (personal digital assistant) ed i moderni telefoni cellulari. Questi strumenti riuniscono, in un’unica apparecchiatura elettronica, processore, memoria, display e tecnologia per l’interazione, e permettono di realizzare facilmente sistemi portatili senza fili.
In questo tipo di approccio alla realtà aumentata si preferiscono applicazioni del tipo video see-through, dove videocamere integrate nei palmari o cellulari catturano immagini dall’ambiente e le rappresentano sui loro schermi dopo avervi sovraimpresso grafiche artificiali (vedi figura 12.11).
Sistemi a realtà aumentata
Fig. 12.11: Hand-held Displays
Esistono comunque anche sistemi ottici see-through, dove si utilizzano specchi separatori di fascio accoppiati con schermi video, realizzati per essere tenuti in mano dall’utente (vedi figura 12.12).
Fig. 12.12: HHD ottici
I principali vantaggi dei sistemi hand-held sono:
- Facile della reperibilità della strumentazione necessaria e costi relativamente contenuti. - Grande potenzialità di rendere commerciabile la tecnologia AR, vista la grande diffusione
dei sistemi hardware necessari all’implementazione di questo tipo di sistemi (al giorno d’oggi quasi tutti i telefoni cellulari in commercio sono dotati di ampi display a colori)
Presentano però i seguenti difetti:
- L’analisi dell’immagine ed il rendering delle grafiche virtuali richiedono grandi capacità di calcolo. Tale requisito è critico per sistemi come palmari e cellulari, e potrebbe dar luogo a eccessivi ritardi nell’immagine o a grafiche di bassa qualità.
- La piccola dimensione dello schermo della maggior parte di questi strumenti restringe il campo visivo raggiungibile. D’altronde, muovere il dispositivo in uno spazio molto più grande del display genera un fenomeno detto “effetto Parks” secondo il quale, muovendo il display su un ambiente fisso, l’immagine visualizzata permane sulla retina dell’operatore, dando l’impressione che il display sia più grande di quello che effettivamente è.
- I sensori video integrati nei comuni sistemi portatili sono progettati per scopi differenti, per cui garantiscono una bassa qualità dell’immagine. Generalmente, inoltre, tali videocamere non sono dotate di auto-focus, per cui il loro funzionamento ottimale è ristretto ad un piccolo campo.
- A differenza degli head-attached devices, gli hand-held devices non lasciano le mani libere all’utente.
12.1.4 Spatial Displays
A differenza dei body attached displays (head-attached o hand-held), gli spatial displays separano la tecnologia dall’utente per integrarla nell’ambiente: si può parlare in questo caso di Spatial Augmented Reality (SAR). Esistono tre differenti approcci che differiscono principalmente nel metodo con cui introducono le informazioni nell’ambiente: video through, optical see-through, direct augmentation.
12.1.4.1 Screen-Based Video See-Through Displays
Tali sistemi fanno uso di una tecnologia di tipo see-through, e visualizzano l’immagine aumentata su un comune monitor per PC (vedi figura 12.13).
Sistemi a realtà aumentata
Fig. 12.13: Screen-based VSD
Tali sistemi consentono un basso grado di immersione nell’ambiente “aumentato”. Generalmente in un contesto di AR il grado di immersione è paragonato alla dimensione del campo visivo dell’osservatore che può essere utilizzato per sovraimporvi grafiche. Nel caso di screen-based AR, il campo visivo è limitato e dipende dalla dimensione del monitor, dal suo allineamento e dalla distanza rispetto all’osservatore.
I principali vantaggi di questo tipo di tecnologia sono: - Semplice reperibilità dei componenti.
- Costi contenuti.
- Semplicità della messa a punto.
I sistemi Screen-Based presentano però i seguenti svantaggi:
- Insoddisfacente risoluzione delle immagini ottenute, in particolar modo quello appartenenti all’ambiente reale (difetto comune a tutti i sistemi see-through).
- E’ più facilmente associabile ad un’animazione computerizzata che ad un sistema immersivo a realtà aumentata.
12.1.4.2 Spatial Optical See-Through Displays
Tali sistemi sono caratterizzati da separatori di fascio piani o curvi, schermi trasparenti o ologrammi,che permettono di combinare nello spazio l'immagine reale con immagini artificiali.
Sono caratterizzati dai seguenti vantaggi:
- Permettono elevate risoluzioni dell'immagine. - Hanno un ampio campo visivo.
- Hanno un’ergonomia superiore alla maggior parte dei sistemi precedentemente analizzati. - La calibrazione è più semplice da realizzare e più stabile.
Presentano però i seguenti svantaggi:
- Non permettono applicazioni mobili a causa dell'utilizzo di ottiche allineate nello spazio - Nella maggior parte dei casi le ottiche utilizzate non permettono di interagire fisicamente
con l'ambiente reale, che si trova al di là delle ottiche
- Il numero di utenti che possono utilizzare contemporaneamente il sistema è strettamente dipendente dalle ottiche utilizzate
- Per le stesse ragioni degli optical see-through HMDs, non si riesce a realizzare una mutua occlusione tra ambiente reale e virtuale
- A causa della limitatezza degli schermi e dei combinatori ottici, gli oggetti virtuali esterni all'area del display sono tagliati in maniera innaturale.
12.1.4.3 Projection Based Spatial Displays
Tali sistemi di spatial augmented reality fanno utilizzo di proiettori per visualizzare immagini direttamente sulle superfici degli oggetti fisici, invece che proiettarle su un piano posto nel campo visivo dell'utente. Vengono utilizzati singoli proiettori fissi o controllabili elettronicamente, oppure proiettori multipli utilizzati per aumentare l'area proiettabile.
La figura 12.14 mostra un esempio di applicazione di questa tecnologia: un proiettore, dotato di uno specchio motorizzato, è posto nell’ambiente di lavoro in una posizione che permetta al fascio luminoso di raggiungerne le varie zone. L’accoppiamento del proiettore con una telecamera permette di rilevare i cambiamenti nell’ambiente di lavoro, adattando così le informazioni proposte. Nella figura si nota ad esempio la creazione di un pulsante virtuale. La telecamera rileva quando la mano copre l’immagine del pulsante ed avvia il processo che si desiderava attivare.
Sistemi a realtà aumentata
Fig. 12.14: Sistemi di proiezione per AR
L'utilizzo di proiettori permette di superare molti difetti tipici degli HMDs: - Migliore ergonomia.
- Campo visivo teoricamente illimitato. - Risoluzione variabile.
- Più semplice messa a fuoco dell'occhio, dato che gli oggetti virtuali sono solitamente visualizzati vicino agli oggetti cui fanno riferimento nel mondo reale.
D'altro canto presentano alcuni problemi tipici di questa soluzione tecnica:
- Interferenza delle ombre, proiettate dagli oggetti fisici presenti nell'ambiente e dall'utente che opera al suo interno.
- I proiettori convenzionali possono mettere a fuoco su un singolo piano di focalizzazione collocato ad una distanza costante. Proiettare su superfici non piane genera immagini confuse. Un'eccezione è costituita dai proiettori laser, che non soffrono di questo effetto. - La complessità dell'allineamento geometrico e della calibrazione del colore aumenta con il
numero di proiettori utilizzati.
12.2 Proposta per l'addestramento degli operatori
Tra le tecnologie grafiche precedentemente analizzate, la più interessante per lo sviluppo di un sistema per l'addestramento degli operatori è la Spatial Augmented Reality, in particolare quella che fa utilizzo di proiettori.
Una caratteristica estremamente desiderabile di tale tipo di tecnologia è la libertà che lasciata all'operatore.
In primo luogo infatti, questi non è obbligato ad indossare scomodi e pesanti sistemi di visione come nel caso di sistemi head attacched, per cui il suo modo di lavorare non cambierà una volta terminato il periodo di addestramento. Inoltre lavorare per un turno di 8 ore vestiti di tale attrezzatura risulterebbe estremamente scomodo. Nel caso di sistemi HMD, inoltre, vi è il problema della scarsa ergonomia data dal ritardo nell'aggiornamento dell'immagine proiettata, specialmente durante veloci movimenti della testa. Questi, se usati per lungo tempo, possono dare senso di nausea, per cui non sono adatti all'uso continuato durante il turno lavorativo dell'operatore. I sistemi di proiezione head-attached necessitano inoltre di particolari superfici su cui proiettare, per cui sarebbe troppo complesso adattare la macchina all'utilizzo di tali sistemi.
I sistemi hand-held, pur non dando tali problemi di ergonomia, occupano una mano dell'utilizzatore, quindi non sono adatti all'impiego oggetto di questo studio.
Tra gli spatial displays, i sistemi screen based sono dotati di bassa immersività, e costringerebbero l'operatore a spostare continuamente l'attenzione tra il monitor e la macchina, per cui pur costituendo un'alternativa, si è deciso di scartare questa possibilità. Gli spatial displays di tipo see-through renderebbero invece impossibile l'interazione con l'ambiente reale, dato che questo è generalmente posto dietro le ottiche.
Per i motivi precedentemente elencati si è ritenuto più adatto al caso in esame l'utilizzo di projection based spatial displays.
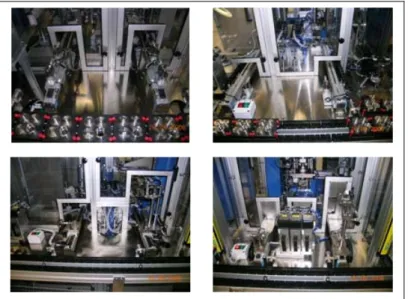
I moduli che compongono la linea di assemblaggio e test oggetto di questa tesi si prestano all'implementazione di questa tecnologia. Ogni modulo è infatti dotato di numerosi sensori che permettono di seguire l'evoluzione delle operazioni di assemblaggio dall'ingresso all'uscita del pezzo dal modulo. L'automazione e la sensoristica del modulo è gestita da un singolo computer, collegato in rete ad un sistema di gestione centralizzato. Ogni modulo è dotato di un touch screen dove viene mostrato lo stato della macchina e che potrebbe essere utilizzati per controllare il sistema di proiezione. I moduli della linea di assemblaggio sono inoltre caratterizzati da un piano, dove si trovano i pallet di ingresso ed uscita dal modulo, che può essere utilizzato per proiettare informazioni ed animazioni leggibili dall'operatore (vedi figura 12.15).
Sistemi a realtà aumentata
Fig. 12.15: Alcuni moduli della linea di assemblaggio
Dato che l'ambiente di lavoro, cioè la Clean Room, è dotato di un impianto di illuminazione artificiale che consente una ottima illuminazione durante tutte le ore del giorno, si è pensato di utilizzare, invece che un tradizionale proiettore da ufficio, un ben più luminoso proiettore laser, del tipo utilizzato per creare grafiche ed animazioni in fiere e feste.
Di seguito è riportata un'analisi delle possibili configurazioni del sistema di proiezione così come della tipologia di informazioni con cui "aumentare" l'ambiente di lavoro dell'operatore.
12.2.1 Struttura di un laser grafico
I laser grafici sono dei sistemi utilizzati nel campo dell’intrattenimento e della pubblicità per creare giochi di luce e grafiche proiettate in ambienti interni ed esterni.
Le grafiche che questi sistemi consentono di proiettare consistono in immagini di tipo wireframe, costituite cioè da un insieme di linee concatenate o separate tra loro. La seguente figura 12.16 mostra due esempi di grafiche realizzabili.
Scandendo nel tempo una serie di immagini, si possono creare animazioni con modalità simili ad una gif animata.
Il principio di funzionamento di questi sistemi sfrutta un difetto dell’occhio, detto “permanenza retinica”: l’occhio registra la traccia luminosa reale e ce la ripropone per un certo periodo di tempo, tanto maggiore quanto più intensa è la fonte luminosa.
Un sistema laser grafico è costituito da tre componenti principali: la sorgente di luce laser, il proiettore laser, un computer dotato di un software per la gestione del sistema [4].
12.2.1.1 Laser
Il principale componente di un laser grafico è, ovviamente, il laser. In generale si possono individuare tre tipologie di laser utilizzati con finalità grafiche: laser all’ Elio-Neon (rosso) a bassa potenza e laser a medio/alta potenza all’argon (verde o blu) o all’ argon/krypton (rosso, giallo, verde, blu). La scelta della potenza della sorgente dipenderà dallo scopo della proiezione che si intende realizzare, cioè dall’uso di grafiche o di fasci laser, dall’ambiente e dalla quantità di persone che dovrà assistervi.
I laser HeNe a bassa potenza sono ottimi per grafiche in ambienti chiusi e di piccole dimensioni. I laser di media potenza sono raffreddati ad aria tramite apposite ventole, e sono adatti a grafiche e ad effetti a fascio su piccola scala, proiettati in luoghi chiusi. I laser ad alta potenza necessitano di essere raffreddati a liquido, e sono utilizzati per effetti grafici in interni di grandi dimensioni, così come per grafiche in ambienti esterni ed effetti di fascio.
12.2.1.2 Proiettore Laser
Il proiettore laser è il cuore del sistema. Contiene i galvanometri e gli amplificatori del sistema di scansione, che insieme muovono il fascio di luce abbastanza velocemente da creare grafiche, disegni ed effetti di luce. Contiene inoltre un apparecchiatura per interrompere (blanking) o frazionare in vari colori il fascio di luce.
12.2.1.2.1 Scanner X-Y
Gli scanners muovono piccoli specchi (circa 3x5 mm) che deflettono il fascio di luce. Vengono utilizzati due scanners: uno per il movimento in orizzontale (X) ed uno per quello verticale (Y). Muovendosi insieme, possono posizionare il fascio dovunque sulla superficie di proiezione (vedi figura 12.17).
Sistemi a realtà aumentata
Fig. 12.17 Coppia di Scanner XY
Per una più accurata riproduzione della grafica è meglio usare scanners galvanometri con controllo ad anello chiuso (detti anche “position detecting” scanners).
Gli specchi ed i relativi supporti possono essere inclusi con lo scanner oppure venduti separatamente.
Oltre al sistema di scansione sarà necessario procurarsi un apparecchiatura di sostegno per lo scanner, che può essere acquistata o fatta su misura. Questa ha lo scopo di mantenere le apparecchiature di scansione nella giusta posizione relativa, e dovranno tener conto della necessità di smaltire il calore prodotto dagli scanners.
12.2.1.2.2 Amplificatore per Scanner
Ogni galvanometro con sistema di controllo ad anello chiuso richiede un amplificatore ad anello chiuso, per condizionare ed amplificare il segnale del computer di controllo. Questi amplificatori possono essere ottenuti sia come circuiti che come unità preassemblate.
Nel caso si usi un amplificatore sotto forma di circuito stampato sarà necessario provvedere ad un sistema di alimentazione. Gli amplificatori preassemblati vengono venduti in box completi di sistema di alimentazione e manopole di regolazione. Le schede hanno il vantaggio di essere più economiche e possono essere montate all’interno dello chassis del proiettore, senza dover trasportare un’altra scatola metallica.
Gli amplificatori di segnale sono collegati agli scanner tramite cavi, preferibilmente corti per fornire un segnale di ritorno il più accurato possibile. Per regolare una intera testa di scansione X-Y saranno necessari due circuiti di amplificazione ed un alimentatore.
12.2.1.2.3 Controllo dei laser monocromatici
La maggior parte dei proiettori laser utilizzano sistemi per interrompere il fascio laser mentre si muove tra le due linee di un disegno. Tali sistemi sono detti sistemi di blanking.
Il blanking di un proiettore monocromatico può essere realizzato con uno scanner galvanico o con un modulatore acusto-ottico a cristallo (AOM: acusto-optic modulator).
Il vantaggio dei sistemi di blanking galvanici è la loro compatibilità con gli scanner galvanici. Il loro tempo di risposta si sincronizza coerentemente con il movimento degli specchi degli scanner galvanici. Il loro svantaggio è che tale tempo di risposta è relativamente lento. Non è sufficiente usare un ostacolo che spostandosi interrompe o libera il fascio di luce, ma devono essere utilizzati complessi percorsi realizzati con un elevato numero di specchi, così che un piccolo movimento del sistema di blanking galvanico possa istantaneamente interrompere il fascio di luce.
Gli AOM lavorano molto più velocemente dei sistemi galvanici. Molte persone ritengono più semplice utilizzare questi sistemi, dato che non hanno bisogno di realizzare percorsi della luce complessi come quelli necessari nei sistemi di blanking galvanici. Ad ogni modo, è necessario regolare la temporizzazione nel software utilizzato o nel circuito di controllo dell’ AOM, così da sincronizzare l’AOM con i più lenti scanner X-Y.
12.2.1.2.4 Controllo dei laser policromatici
Dal 1992, la maggior parte dei proiettori laser a più colori usano AOM policromatici (PCAOM: polychromatic AOM). Questi controllano sia il blanking che la selezione dei colori, il tutto condensato in un'unica apparecchiatura. Generalmente sono utilizzati con fasci di "luce bianca" per realizzare grafiche a colori.
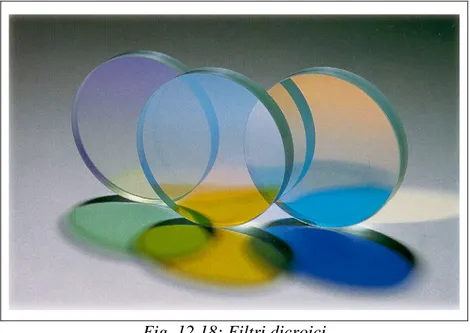
Un fascio di luce bianca può essere creato usando un laser all'argon raffreddato ad aria ed uno all'elio-neon. I due fasci di luce che si ottengono verranno combinati utilizzando un filtro dicroico. Un filtro dicroico (vedi figura 12.18) è un filtro di luce particolarmente accurato usato per far passare selettivamente un piccolo range di colori mentre gli altri vengono riflessi, e consiste in un vetro colorato. La colorazione di tali vetri è ottenuta con particolare processo in cui viene posta sul vetro, tramite evaporazione sotto vuoto, una pellicola trasparente molto sottile di natura diversa da quella di uno specchio. In tal modo si assisterà ad un fenomeno ottico di iridazione colorata di tinte vive e pure. Il filtro dicroico non opera per semplice "colorazione": la luce che lo attraversa viene infatti parzialmente respinta e quella che lo attraversa assume la colorazione. E' per questo motivo che se si osserva un filtro dicroico questo sembra, su una superficie, essere specchiato. L'introduzione di questi elementi è stata necessaria a causa della temperatura molto elevata a cui arriva la luce prodotta dalle lampade a scarica o lasers. Le gelatine classiche infatti non sono in grado di resistere a queste temperature, mentre il filtro dicroico è in grado di funzionare
Sistemi a realtà aumentata
Fig. 12.18: Filtri dicroici
Utilizzando un filtro dicroico si potrà mischiare la luce rossa prodotta dal laser HeNe alla luce verde e blu prodotta dal laser all'Argon, ed ottenere così un singolo fascio di luce bianca. Per ottenere maggiore potenza ad un costo inferiore è possibile acquistare un laser a gas misti, che realizzi luce bianca in un singolo fascio.
Il bilanciamento dei colori è molto importante, quindi sarà bene assicurarsi che il fascio ottenuto abbia un mix di colori ben bilanciato. In particolare, poiché l'occhio è molto sensibile al verde, sarà bene avere nel fascio una maggiore percentuale di luce blu e rossa.
In un sistema che si avvale di un PCAOM (vedi figura 12.19), il fascio di luce bianca è diretto contro un cristallo. Un segnale dal computer arriva al sistema di controllo del PCAOM, che fa in modo che il cristallo diffragga differenti lunghezze d'onda dal fascio d'origine. Il fascio diffratto, che sarà colorato, procede verso lo scanner X-Y.
I sistemi di controllo per PCAOM vengono realizzati a 4, 6 o 8 canali. Tale numero si riferisce alla quantità di lunghezze d'onda che possono essere contemporaneamente controllate. I PCAOM permettono di controllare il fascio di luce con estrema rapidità, tanto che ogni punto di un'immagine può avere un differente colore (vedi figura 12.20) realizzando così immagini rasterizzate simili ad una TV.
Fig. 12.20: Esempio di immagine rasterizzata
Generalmente si utilizza i PCAOMs anche se non si ha a disposizione una sorgente di luce bianca. Si potranno così modulare tutte le lunghezze d'onda presenti in un laser (ad esempio verde e blu in un laser all'Argon) e, nel momento in cui si vorrà passare ad una proiezione a colori, sarà sufficiente sostituire il laser utilizzato con una sorgente di luce bianca, mantenendo invariato il proiettore.
12.2.1.2.4 Esempio di proiettore laser
Sistemi a realtà aumentata
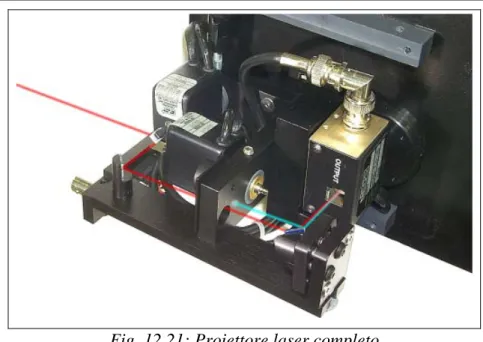
Fig. 12.21: Proiettore laser completo
Il fascio di luce bianca, proveniente da dietro il PCAOM, entra nel polycromatic acusto-optic modulator. Questo divide il fascio in due componenti: un fascio colorato ed un fascio "scarto".
Il fascio desiderato, rosso nella foto, esce dal PCAOM, rimbalza su uno specchio, passa attraverso un foro e, rimbalzando su un altro specchio, colpisce lo specchio dello scanner dedicato al controllo dell'asse X. Da questo viene riflesso verso lo specchio dello scanner relativo all'asse Y, che dirige il fascio verso la superficie di proiezione.
Il fascio "scarto" contiene tutti i colori indesiderati (celeste nella foto). Questo esce dal PCAOM con un angolo leggermente differente, così che può essere scaricato su una superficie nera.
12.2.1.3 Computer e Software
In commercio si possono trovare numerosi tipi di software utilizzati per realizzare grafiche laser, compatibili con Macintosh o IBM PC. Esistono anche programmi venduti con un computer appositamente realizzato.
12.2.1.4 Materiale disponibile in commercio
Il mercato offre una gamma assai ampia per ogni componente del sistema laser, e la scelta sarà dettata dalle prestazioni richieste e dal budget disponibile.
Per quanto riguarda la scelta della sorgente laser, come precedentemente detto un parametro di cui tenere conto è la distanza a cui si intende proiettare il fascio. Nel caso poi che questo venga diretto verso persone od oggetti riflettenti, si dovrà tenere conto dei necessari requisiti di sicurezza, che imporranno l’utilizzo di apposite schermature e potenze ridotte.
La scelta delle componenti del proiettore è piuttosto complessa e, combinando componenti di tipo differente, si possono ottenere risultati estremamente diversi. Gli scanner più diffusi sono quelli
realizzati dalla Cambridge Technology e la GSI Lumonics. La scelta dello scanner più adatto sarà vincolata dalla velocità di scansione desiderata, dalla dimensione del fascio che si vuole regolare, dall’ingombro delle due teste di scansione e della relativa struttura di supporto, che potrà essere acquistata insieme allo scanner oppure realizzata su misura delle proprie esigenze. Le medesime compagnie che commerciano gli scanner vendono generalmente anche i relativi sistemi di controllo, che saranno quindi la scelta ottimale per un corretto accoppiamento scanner-driver.
I migliori sistemi di controllo della luce laser sono i PCAOM, dato che combinano sia la funzione di regolazione delle frequenze emesse sia la funzione di blanking e sono di dimensioni compatte. Una delle maggiori case produttrici è la Neos Technologies, che realizza AOM e PCAOM espressamente realizzati per i sistemi grafici.
Infine, per quanto riguarda i software, uno dei più diffusi per la realizzazione di laser grafiche è
Pangolin Laser Designer 2000, che viene commercializzato in tre versioni: "intro", "basic" e "pro".
Le tre versioni propongono prestazioni differenti, come la gestione di un numero differente di colori, il numero di coppie di assi controllabili, la possibilità di gestire grafiche tridimensionali. La versione “intro”, ampiamente sufficiente per le prestazioni richieste dal sistema proposto, è reperibile in commercio al prezzo di circa 1500 euro.
Più economici sono invece i software Mamba 2004 e Mamba Black, che possono essere reperiti, rispettivamente, al costo di 129 e 229 euro. Per altre 300 euro la casa produttrice, la Medialas, fornisce anche un hardware USB per interfacciare il PC con i più diffusi sistemi di controllo. La figura 12.22 mostra la struttura della pagina di lavoro del software Mamba 2004.
Sistemi a realtà aumentata
Un’alternativa è quella di acquistare un pacchetto completo di tutte le componenti necessarie precedentemente descritte. Un esempio è il modello Cat’s Meow della Spectrascan, che completo di sorgente laser verde da 20 mW e software Pangolin “intro” è venduto a circa 3700 euro. Un altro esempio è il modello ClubCat! , commercializzato dalla Technological Artisan, completo di sorgente laser verde da 5 mW e da un software prodotto dalla ditta stessa, a circa 3650 euro.
12.2.2. Considerazioni sulla sicurezza e scelta di una sorgente laser
12.2.2.1 Classificazione delle sorgenti laser
I laser sono classificati per livelli crescenti di pericolosità. Di seguito si riporta la suddivisione comunemente adottata con una breve descrizione dei fattori di rischio associati ad ogni classe:
• CLASSE 1: il fascio di questo tipo di dispositivi è considerato innocuo perchè la radiazione emessa è sempre al di sotto degli standard massimi consentiti (MPE, Massima Esposizione Permessa).
• CLASSE 2 (Laser a bassa potenza, con emissione continua nel campo del visibile): i laser in questa classe possono emettere radiazioni pericolose, ma la loro potenza è così bassa da risultare dannosa solo in caso di esposizione diretta e prolungata, ovvero per un tempo superiore agli 0.25 secondi, tempo necessario all'attivarsi del riflesso palpebrale. Sono compresi in questa classe i laser ad emissione continua e nel visibile (lunghezza d'onda tra 400 e 700 nm), con potenza inferiore o uguale a 1mW.
• CLASSE 3A (Laser a media potenza): sono compresi in questa classe i laser con emissione nel visibile e una potenza in uscita fino a 5 mW. Possono emettere radiazioni sia nel campo del visibile che in quello del non visibile e i loro fasci non sono pericolosi se osservati direttamente in maniera non continua, mentre lo possono diventare se si utilizzano strumenti che amplificano e concentrano il fascio ottico come microscopi, binocoli ecc.. • CLASSE 3B (Laser a media potenza): i laser appartenenti a questa classe hanno potenze
medie comprese tra i 5 mW e i 500mW. I laser di classe 3B sono pericolosi per gli occhi se non protetti e possono essere pericolosi per la pelle; anche le riflessioni diffuse da questi sistemi possono essere pericolose. Devono essere prese precauzioni per evitare lo stazionamento nella direzione del fascio o del fascio riflesso da una superficie.
• CLASSE 4 (Laser ad alta potenza): sono i laser più pericolosi in quanto, oltre ad avere una potenza tale da causare seri danni ad occhi e pelle anche se il fascio è diffuso, possono
costituire un potenziale rischio d’incendio, causare fuoriuscita di materiale tossico e spesso il voltaggio e l’amperaggio di alimentazione sono pericolosamente elevati.
Per riferimenti legislativi più precisi circa pericolosità e misure di sicurezza da adottare durante l’uso di un laser si rimanda all’appendice T.
12.2.2.2 Scelta della una sorgente Laser per il sistema SAR
L’ambiente in cui si pensa di implementare il sistema di SAR è caratterizzato dalla presenza di numerose attrezzature metalliche, quindi fortemente riflettenti. Inoltre l’operatore dovrà lavorare in prossimità della sorgente laser e della superficie di proiezione.
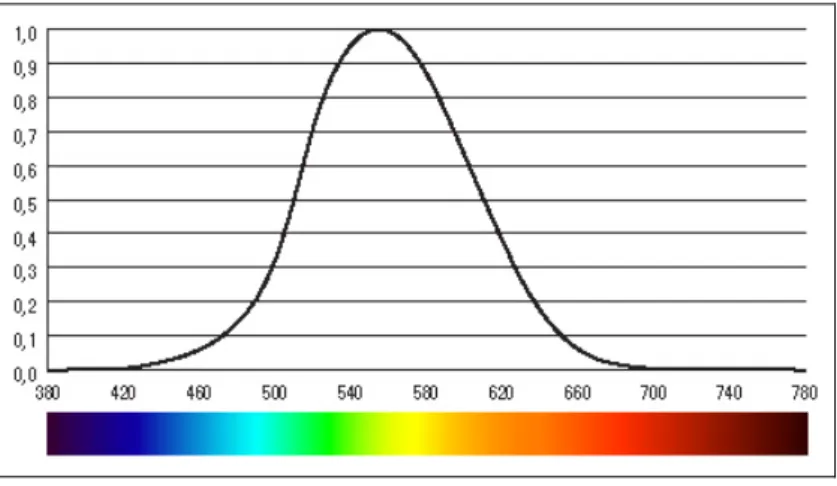
Per questi motivi la scelta del laser da utilizzare è caduta su una sorgente di classe due, quindi di potenza inferiore ad 1 mW. Preferibilmente la sorgente dovrà essere di luce verde, data la maggiore brillantezza che gli concede una visibilità tre volte maggiore delle più comuni fonti di colore rosso (vedi figura 12.23).
Fig. 12.23: Spettro luminoso
Sul mercato è piuttosto semplice reperire diodi laser che emettano a quelle potenze, ed i costi sono contenuti.
12.2.3 Analisi di un caso pratico: il modulo #240
Una volta definita la strumentazione necessaria ad implementare il sistema di AR, se ne è ipotizzata l’applicazione su un modulo della linea d’assemblaggio.
Sistemi a realtà aumentata
stato scelto per simulare un’applicazione del sistema di AR perchè il ciclo di lavoro è piuttosto articolato, e presenta le quattro tipiche azioni che un operatore deve compiere su una linea di assemblaggio: movimentazione, assemblaggio manuale, assemblaggio automatizzato, controllo visivo.
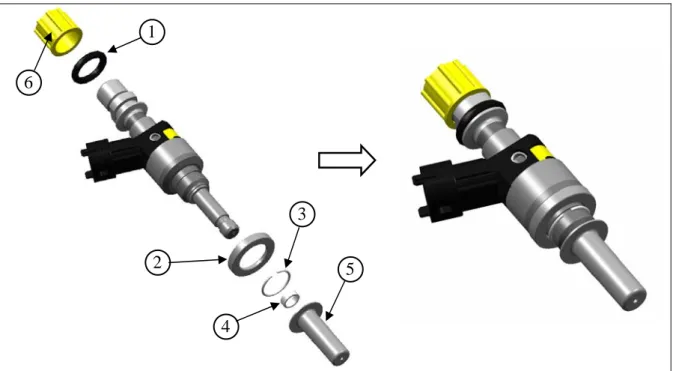
In particolare, una volta prelevato un iniettore appena testato, l’operatore del modulo #240 dovrà assemblare manualmente i componenti Damper O-Ring (1)e Spacer Ring (2). Successivamente inserirà l’iniettore nel pallet di ingresso del modulo ed azionerà il ciclo automatizzato. Prima che la macchina completi il ciclo programmato, l’operatore dovrà controllare sul monitor, posto sopra il modulo, l’ingrandimento della punta dell’iniettore effettuato tramite una videocamera, e verificare che non vi siano danneggiamenti o graffi. Nel caso in cui l’esito del controllo sia positivo, il modulo procede all’assemblaggio dei componenti Snap Ring (3) e
Combustion Seal (4). L’iniettore così assemblato esce dal modulo tramite un apposito pallet e, se è
considerato privo di difetti dai sistemi di controllo della macchina, l’operatore procede all’assemblaggio manuale del Sizing Cap (5) e del Protection Cap (6). Una volta completato, l’iniettore verrà inserito su un sistema automatico che verifica il corretto montaggio dei componenti e ne registra il codice identificativo. Se tutti i controlli hanno esito positivo viene inserito in un contenitore dedicato ai pezzi buoni.
1 3 6 2 4 5
Fig. 12.24: Componenti assemblati sul modulo #240
Per una descrizione più dettagliata delle operazioni relative ad un ciclo di lavoro, si rimanda all’appendice U.
Il modulo #240, come tutti i moduli della linea XL2, è caratterizzato da un piano su cui poggiano le guide dei pallet di carico ed scarico. Tale piano potrà essere utilizzato per la proiezione di scritte od animazioni. Inoltre è dotato di un computer, il cui compito è quello di gestire le impostazioni della macchina, ed un relativo touch screen, che potrà essere impiegato anche per la gestione del sistema SAR. In figura 12.25 si riporta un’immagine del modulo #240.
Fig. 12.25: Il modulo #240
12.2.3.1. Posizione e quantità delle sorgenti di luce
Un primo problema da affrontare, al momento dell’implementazione del sistema di SAR proposto ad un caso pratico, è la scelta della posizione della sorgente laser.
Il modulo #240, scelto come modello per una possibile implementazione, presenta una struttura che sporge proprio sopra il piano che si pensa di utilizzare per proiettarvi grafiche ed animazioni (vedi figura 12.26).
Sistemi a realtà aumentata STRUTTURA SPORGENTE - OTTIMO SUPPORTO PER IL PROIETTORE
Fig. 12.26: Zona di supporto per il proiettore
Questa sembra particolarmente adatta ad installarvi il proiettore laser, e la vicinanza con il computer installato sulla macchina facilita le necessarie connessioni.
Un altro fattore di cui tenere conto è la distanza del proiettore dal piano. I sistemi laser in commercio permettono, infatti, di coprire con il fascio angoli compresi tra i 40 ed i 70° nelle direzioni X e Y. Questo pone un limite sulla distanza minima che il proiettore deve avere dal piano di proiezione se si vuole coprire una superficie sufficientemente ampia (vedi figura 12.27).
Fig. 12.27: Relazioni geometriche
Nel caso in esame il rapporto tra distanza ed altezza è circa pari ad uno, quindi la posizione scelta può essere adatta all’installazione del proiettore.
Un altro problema sarà la determinazione della quantità di sorgenti di luce da utilizzare e dei punti in cui posizionarle. Di seguito si riporta un’analisi dettagliata delle possibili configurazioni,
tenendo conto del fatto che si prevede di proiettare nelle zone centrale e sinistra del piano (la zona di destra viene spesso utilizzata per riporvi pallets contenenti materiale per l’assemblaggio).
12.2.3.1.1 Una fonte di luce in posizione centrale
La prima configurazione analizzata è quella in cui si utilizza una singola sorgente di luce, posta in alto, sopra il piano del modulo, ed in posizione centrale (vedi fig. 12.28).
Fig. 12.28: Singola fonte di luce centrale
Nell' immagine di figura 12.28 si nota come questa collocazione della fonte di luce permetta di illuminare completamente la parte del piano compresa tra le due guide dei pallet di ingresso ed uscita dal modulo. Sarà quindi possibile realizzare le proiezioni, previste nel precedente capitolo, che interessano tale zona. Le zone poste sui lati delle guide sono invece parzialmente oscurate dalle guide stesse, anche se la parte di piano che non è raggiunta dalla luce non è di dimensioni significative.
Questa configurazione permette di ottenere quindi risultati accettabili, anche se l'illuminazione del lato sinistro non è ottimale a causa dell'ostacolo costituito dalla guida del pallet di uscita. Ciò potrebbe creare difficoltà alla proiezione delle informazioni su questo lato.
Sistemi a realtà aumentata
Fig. 12.29: Singola fonte di luce a sinistra
In questo caso la zona centrale del piano del modulo non è completamente illuminata, ma è parzialmente oscurata dalla guida del pallet di uscita. Questo potrebbe creare difficoltà nella proiezione delle immagini nella suddetta zona centrale. La zona di destra è notevolmente coperta dall'ombra della guida di ingresso. Questo non rappresenta un problema poiché non si è previsto di proiettare alcuna informazione su quel lato del modulo. La zona di sinistra è invece ben illuminata, nonostante i contenitori degli scarti oscurino una parte del piano di proiezione.
12.2.3.1.3 Una fonte di luce posta a destra
Secondo questa configurazione si propone di utilizzare una fonte di luce posta sul lato sinistro del modulo (vedi fig. 12.30).
Anche qui, come nel caso precedente, la zona centrale del piano del modulo non è completamente illuminata. Qui è parzialmente oscurata dalla guida del pallet di ingresso, che copre una zona ampia e priva di ostacoli, che si era previsto di utilizzare per proiettare animazioni ed altre informazioni complesse.
La zona di destra è ottimamente illuminata, ma non si ricavano vantaggi da ciò dato che non si prevede di proiettarvi alcuna informazione.
La zona di sinistra è invece in gran parte oscurata dalla guida di uscita, il che non permetterebbe di proiettare gran parte delle informazioni previste.
Questa configurazione è quindi completamente da scartare, dato che rende difficoltosa la proiezione su entrambe le superfici utilizzate, cioè il lato sinistro la zona centrale.
12.2.3.1.4 Una fonte di luce allineata con la guida di sinistra
Questa configurazione prevede di utilizzare una singola sorgente di luce, posta a perpendicolo sopra la guida del pallet di uscita (vedi fig. 12.31).
Fig. 12.31: Singola fonte di luce allineata con la guida di sinistra
In questo caso la zona centrale è ottimamente illuminata, e permette di realizzare tutte le proiezioni previste.
Sistemi a realtà aumentata
La zona di sinistra è illuminata in maniera ottimale, dato che la guida di uscita non rappresenta un ostacolo, ed i contenitori dei pezzi scarto non rappresentano un ostacolo significativo perchè poste all'estrema sinistra del piano di proiezione.
12.2.3.1.5 Una fonte di luce allineata con la guida di destra
Questa configurazione prevede di utilizzare una singola sorgente di luce, posta a perpendicolo sopra la guida del pallet di ingresso (vedi fig. 12.32).
Fig. 12.32: Singola fonte di luce allineata con la guida di destra
Anche in questo caso la zona centrale è ottimamente illuminata, e permette di realizzare tutte le proiezioni previste.
La zona di destra è illuminata in maniera ottimale, ma non se ne ricava vantaggio dato che non si prevede di proiettare alcuna informazione su quel lato.
La zona di sinistra è invece parzialmente coperta dall'ombra della guida di uscita.
Questa configurazione è quindi poco adatta a mostrare le informazioni previste perchè ottimizza la proiezione su un lato che, per le scelte fatte, rimane inutilizzato.
12.2.3.1.6 Due fonti di luce allineate con le guide
Questa configurazione prevede l'utilizzo di due sorgenti di luce, una posta a perpendicolo sopra la guida del pallet di ingresso ed una a perpendicolo sopra la guida del pallet di uscita (vedi fig. 12.33).
Fig. 12.33: Due fonti di luce allineate con le guide
Questa configurazione unisce i vantaggi dell'utilizzo di un singolo proiettore posto a perpendicolo sulla guida di ingresso e d'uscita. Visto però l'ottimo risultato ottenibile con una sola sorgente di luce, l'utilizzo di due sorgenti sembra un'inutile complicazione tecnica ed uno spreco di denaro.
12.2.3.1.7 Due fonti di luce poste alle estremità sinistra e destra
Questa configurazione prevede l'utilizzo di due sorgenti di luce, poste alle estremità opposte del modulo (vedi fig. 12.34).
Sistemi a realtà aumentata
Questa configurazione ottimizza la proiezione sui lati, cosa che non presenta grandi vantaggi dato che il lato destro rimane inutilizzato.
L'illuminazione della zona centrale rimane invece difficoltosa dato che entrambi i proiettori utilizzati incontrano l'ombra creata dalle guide. L'unico modo per coprire interamente la zona centrale sarebbe quello di integrare l'azione dei due proiettori per ottenere una singola immagine, a prezzo però di una notevole complicazione tecnica.
12.2.3.1.8 Conclusioni
Nella seguente tabella si riassume la capacità di ogni configurazione di illuminare il piano di lavoro: Tipo di soluzione proposta Illuminazione lato sinistro Illuminazione zona centrale Illuminazione
lato destro Note
Singola fonte di luce
centrale medio ottimo medio
Singola fonte di luce a
sinistra ottimo medio scarso
Singola fonte di luce a
destra scarso medio ottimo
Singola fonte di luce allineata con la guida sinistra
ottimo ottimo scarso Singola fonte di luce
allineata con la guida destra
scarso ottimo ottimo Due fonti di luce
allineate con le guide ottimo ottimo ottimo
L’utilizzo di due proiettori risulta antieconomico
Due fonti di luce poste alle estremità sinistra e destra
ottimo scarso* ottimo
L’utilizzo di due proiettori risulta antieconomico * L'illuminazione della
zona centrale rimane invece difficoltosa dato che entrambi i proiettori utilizzati incontrano l'ombra creata dalle
guide
Tab. 12.1: Illuminazione del piano di proiezione
Risulta quindi evidente che la soluzione migliore tra quelle analizzate sembra essere quella esposta nel paragrafo 12.2.3.1.4, che consiste cioè nell'utilizzo di una sola fonte di luce posta a perpendicolo sopra la guida del pallet di uscita.
12.2.3.2 Considerazioni sulla postura dell’operatore
Un aspetto da tenere in considerazione è l’interferenza che si può avere tra il lavoro dell’operatore e le immagini proiettate dal laser. Durante le normali operazioni di movimentazione ed assemblaggio il corpo dell’operatore potrebbe, infatti, frapporsi tra la sorgente di luce ed il piano di proiezione, causando l’interruzione del flusso di informazioni proiettate sul piano della macchina. La luce laser potrebbe inoltre essere pericolosa se focalizzata direttamente sugli occhi dell’operatore.
Nella figura 12.35 è rappresentata schematicamente la posizione dell’operatore durante il lavoro sul modulo #240 preso in esame.
Fig. 12.35: Posizione operatore
Le operazioni da svolgere sul modulo si dividono in tre tipi: operazioni di assemblaggio manuale, controlli visivi e movimentazione del materiale.
Durante le operazioni di assemblaggio manuale, l’operatore si trova di fronte al piano utilizzato per la proiezione delle informazioni. Ciò non interferisce con la sorgente di luce dato che, manipolando i pezzi con la schiena eretta, si trova all’esterno del modulo.
Durante il controllo visivo sullo stato del particolare “sede”, l’operatore dovrà controllare l’immagine ingrandita da una telecamera e proiettata sul touch screen posto nella parte superiore del modulo. L’operatore dovrà arretrare, allontanandosi dal piano di proiezione, e alzare lo sguardo.
Sistemi a realtà aumentata
macchina, dove si trovano i pallet di ingresso ed uscita ed il sistema di controllo e dove potrebbero essere posizionati i cestelli con i componenti da assemblare (vedi figura 12.36).
Fig. 12.36: Operatore al lavoro sul modulo #240
In particolare, durante la fase di carico e scarico dell’iniettore dal pallet di ingresso ed uscita, le braccia dell’operatore si protendono verso l’interno della macchina. Nella fase di carico difficilmente si creerà interferenza tra i movimenti dell’operatore e le proiezioni, mentre in quella di scarico le braccia andranno a coprire per un breve tempo il piano di proiezione. Sarà, quindi, necessario prevedere una maggior durata del tempo di proiezione della relativa slide, così da tenere conto del tempo occorrente all’operatore per ritrarre il braccio e rimettersi in una posizione più comoda.
12.2.3.3 Analisi delle informazioni da proiettare in funzione dell’addestramento dell’operatore
Una volta stabilita la struttura del sistema di proiezione sarà necessario definire in maniera dettagliata le informazioni da fornire all’operatore. In appendice U è riportato un diagramma di flusso che descrive ogni operazione, manuale o logica, che deve compiere l’operatore durante un ciclo produttivo. Basandosi su tale diagramma si è definito la struttura delle informazioni con cui il sistema di SAR dovrà arricchire l’ambiente di lavoro.
Un primo problema da affrontare nella preparazione della sequenza da proiettare è la scelta del metodo di esposizione, che dovrà essere adatto al tipo di utenza a cui ci si vuole rivolgere. Nel caso, infatti, in cui gli operatori abbiano scarsa esperienza in ambito tecnico o che si tratti addirittura di operatori stranieri, con difficoltà a comprendere termini complessi della lingua italiana, sarà necessario fornire informazioni più semplici possibile.
In questo caso le proiezioni saranno per la maggior parte costituite da disegni ed animazioni, così da limitare il numero di istruzioni scritte. Le poche informazioni scritte da mostrare all’operatore dovranno essere espresse in un italiano semplice, privo di termini tecnici e poco comprensibili. Si preferirà infatti l’uso di un italiano colloquiale, avvalendosi cioè del tipo di registro che viene più velocemente appreso da uno straniero con poca familiarità con la lingua italiana.
Un’altro fattore di cui tenere conto è il grado di addestramento dell’operatore a cui ci si rivolge. Il sistema previsto, infatti, non sarà necessariamente utilizzato solo con personale totalmente inesperto. Potrebbe presentarsi infatti l’occasione di dover addestrare all’uso del modulo #240 anche un operatore che abbia già lavorato su altri moduli della linea oppure che abbia già lavorato in passato sullo stesso modulo e abbia bisogno di ripristinare le conoscenze acquisite.
Per questo motivo si è deciso di preparare tre differenti programmi di apprendimento, differenziati a seconda del livello di conoscenza dell’operatore considerato:
- operatore non addestrato: operatore che entra per la prima volta nella linea di produzione
considerata;
- operatore addestrato sulla linea: operatore che ha già lavorato sulla linea e che quindi ne
conosce la tipologia e gli aspetti caratteristici, nonostante non abbia mai lavorato sul modulo preso in esame;
- operatore addestrato sul modulo: operatore che abbia già lavorato in precedenza sul
modulo in esame.
In appendice V sono riportate le simulazioni dei tre programmi di addestramento operatore previsti.
12.2.3.3.1 Operatore non addestrato
Nel caso in cui l’operatore non abbia mai lavorato sulla linea a cui appartiene il modulo #240, o che addirittura non abbia mai lavorato su una catena di montaggio, sarà necessario fornirgli informazioni estremamente dettagliate. Sarà necessario quindi guidarlo passo dopo passo nel completamento di un ciclo produttivo, seguendo punto per punto le azioni descritte nel diagramma di flusso riportato in appendice U.
Sistemi a realtà aumentata
- indicare le zone dove reperire tali componenti o dove trovare gli azionamenti o gli
strumenti di controllo necessari a completare il ciclo (vedi esempio in figura 12.37).
Fig. 12.37: Esempio dell’uso di indicatori e frecce
Le scritte specificheranno l'azione che l'operatore deve compiere, utilizzando un italiano diretto e colloquiale: in particolare l'uso del presente/imperativo facilita la comprensione da parte di un operatore straniero. Nel caso in cui si debba prelevare un componente, ne verrà visualizzato il nome perchè, anche se arricchisce di poco le informazioni date ad un utente che non conosce il processo, gli permetterà comunque di familiarizzare con le tipologie di componenti che vengono assemblate, facendo si che l'operatore impari ad identificare il componente con il suo nome proprio (vedi figura 12.38).
Fig. 12.38: Esempio di identificazione di un componente
Le immagini ed animazioni sono utilizzate o per facilitare il riconoscimento del particolare da assemblare o per mostrare, generalmente tramite animazioni, le azioni che l’operatore deve compiere. I dettagli dell'immagine proiettata saranno semplificati al massimo, sia per facilitare la comprensione da parte di un operatore che non sia in grado di leggere un disegno tecnico, sia per vincoli tecnologici dati dal sistema di proiezione utilizzato, nel caso in cui la scelta cada sul laser.
Nella seguente figura 12.39 si riporta ad esempio un fotogramma dell’animazione che mostra come assemblare il particolare “protection cap” sull’iniettore.
Fig. 12.39: Fotogramma di un’animazione
12.2.3.3.2 Operatore addestrato sulla linea
Nel caso in cui l’operatore abbia già lavorato su altre macchine della linea cui appartiene il modulo #240, questi dovrà ricevere un addestramento di tipo differente. In particolare non ci sarà la necessità di seguirlo passo dopo passo nel ciclo produttivo, dato che si suppone abbia già un’idea dei ritmi e del metodo di lavoro sulla linea in questione, così come delle tecnologie impiegate.
Nel definire la serie di informazioni da fornire all’operatore, si è deciso quindi di semplificare e sintetizzare le animazioni che riguardano parti del processo che sono comuni con gli altri moduli della linea, e si ritiene quindi siano già state assimilate. Questo allo scopo di evitare di distrarre e quindi rallentare il lavoro con immagini e grafiche superflue, che non darebbero valore aggiunto al sistema di addestramento proposto, ma anzi potrebbero disturbare l’operatore distraendolo da automatismi ormai in lui consolidati. Si è scelto di sostituire il testo con le immagini in seguito ad un’indagine svolta tra un campione di operatori che conoscessero già il modulo #240. Ad alcuni di questi sono state infatti mostrate due simulazioni delle istruzioni fornite, realizzate con il software PowerPoint, una che prediligeva informazioni testuali, una che prediligeva l’uso di immagini ed animazioni. Gli intervistati hanno affermato di poter seguire più facilmente la seconda, dato che
Sistemi a realtà aumentata
Le informazioni che riguardano aspetti fondamentali del processo di assemblaggio sono state mantenute invariate rispetto al caso di operatore non addestrato precedentemente descritto.
12.2.3.3.3 Operatore addestrato sul modulo
Nel caso in cui l’operatore abbia già avuto in passato un addestramento sul modulo #240, ma non vi lavori da un po’ di tempo, potrà essere necessario supportarne il lavoro, per un breve periodo, con il sistema di SAR.
In questo caso si eviterà di fornire i dettagli di ogni operazione da eseguire durante il ciclo produttivo, ma si guiderà il lavoro dell’operatore ricordando solo i punti chiave del processo.
Di seguito si riporta una tabella che riassuma la sequenza di informazioni programmate per l’addestramento dell’operatore che dovrà lavorare sul modulo #240, considerando i tre possibili gradi di conoscenza della linea e della macchina in cui dovrà lavorare.
Informazioni Fornite SEQUE N ZA OPERAZIO NI Istruzione
Fornita Livello 1: operatore a Livello 2: operatore b Livello 3: operatore c
1
L'operatore deve prelevare l'iniettore da lavorare dalla stazione precedente. La freccia indica il lato dove
cercare l'iniettore. PRENDI INIETTORE PRENDI INIETTORE PRENDI INIETTORE
L'immagine mostra il componente da prelevare
per l'assemblaggio.
PRENDI DAMPER ORING PRENDI DAMPER ORING
2 Un'animazione mostra come assemblare il comonente prelevato. L'immagine mostra il componente da prelevare per l'assemblaggio.
PRENDI SPACER RING PRENDI SPACER RING
3
Un'animazione mostra come assemblare il comonente prelevato.
Informazioni Fornite SEQUE N ZA OPERAZIO NI Istruzione
Fornita Livello 1: operatore a Livello 2: operatore b Livello 3: operatore c
4 L'immagine avverte di caricare il pezzo sulla macchina. Il pallet di carico viene illuminato.
5 L'operatore deve avviare la macchina. L'immagine
indica l'interruttore da azionare. L'interruttore è messo in evidenza con un
fascio di luce. AVVIO - START CARICA IL PEZZO - AVVIA LA MACCHINA CARICA IL PEZZO - AVVIA LA MACCHINA 6 L'immagine ricorda al'operatore di eseguire il controllo visivo tramite il
touch screen del modulo. CONTROLLA MONITOR CONTROLLA MONITOR
CONTROLLA MONITOR
7
L'immagine avverte di scaricare il pezzo sulla macchina. Il pallet di scarico viene illuminato.
SCARICA PEZZO SCARICA PEZZO
Sistemi a realtà aumentata Informazioni Fornite SEQUE N ZA OPERAZIO NI Istruzione
Fornita Livello 1: operatore a Livello 2: operatore b Livello 3: operatore c
L'immagine mostra il componente da prelevare
per l'assemblaggio. PRENDI PROTECTION CAP PRENDI PROTECTION CAP
8a Un'animazione mostra come assemblare il comonente prelevato. L'immagine mostra il componente da prelevare per l'assemblaggio.
PRENDI SIZING CAP PRENDI SIZING CAP
9a Un'animazione mostra come assemblare il comonente prelevato. Un'animazione, con un messaggio di warning, avverte l'operatore che il pezzo appena processato è
uno scarto. 8b
L'immagine indica il cassetto in cui inserire il
pezzo appena scartato.
Informazioni Fornite SEQUE N ZA OPERAZIO NI Istruzione
Fornita Livello 1: operatore a Livello 2: operatore b Livello 3: operatore c
10
L'animazione e la scritta avvertono di inserire l'iniettore processato nel sistema di controllo finale. Una freccia indica il pallet del sistema di controllo.
CONTROLLO FINALE
11
Un'animazione avverte l'operatore che può avviare
il sistema di controllo.
AVVIA CONTROLLO
CONTROLLO FINALE
CONTROLLO FINALE
Una scritta avverte l'operatore che il pezzo
appena controllato è buono.
OK!
OK!
12a Un'animazione indica all'operatore di inserire l'iniettore buono nel trayposto alla sua sinistra.
OK!
- CARICA TRAY
Sistemi a realtà aumentata Informazioni Fornite SEQUE N ZA OPERAZIO NI Istruzione
Fornita Livello 1: operatore a Livello 2: operatore b Livello 3: operatore c
Un'animazione, con un messaggio di warning, avverte l'operatore che il pezzo appena processato è
uno scarto.
12b
Un'animazione avverte l'operatore di ricontrollare
il corretto montaggio dei caps.
13b
L'animazione e la scritta avvertono di inserire nuovamente l'iniettore appena ricontrollato nel sistema di controllo finale. Una freccia indica il pallet del sistema di controllo.
CONTROLLO FINALE
14b
Un'animazione avverte l'operatore che può avviare
il sistema di controllo.
AVVIA CONTROLLO
CONTROLLO FINALE
CONTROLLO FINALE