Metodologia
Il capitolo ha lo scopo di fornire una panoramica degli aspetti coinvolti nella realizzazione della procedura atta a valutare le prestazioni di una vela.
1.1. Equilibrio della barca e schema di riferimento
La barca a vela naviga in condizioni di equilibrio tra forze e momenti di natura aerodinamica e idrodinamica. Le prime sono principalmente il risultato del moto relativo tra aria e vele, con contributi anche dell’attrezzatura e della parte di scafo emersa. Le seconde nascono dal moto relativo tra acqua e scafo immerso. È evidente che i due aspetti sono fortemente correlati ed entrambi necessari alla stima delle prestazioni di una imbarcazione.
In particolare il moto relativo tra l’imbarcazione e l’acqua è caratterizzato anche da una componente di moto laterale, che determina un angolo di scarroccio λ tra velocità effettiva della barca e direzione della prua.
Anche nel caso del moto relativo all’aria, esistono due contributi: il vento reale ( l’effetto meteorologico percepibile da un osservatore fermo rispetto al suolo) ed il vento relativo generato dalla traslazione della barca (rilevato dall’osservatore solidale ad essa come opposto al moto della barca, se siamo in condizioni di vento reale nullo). La combinazione del vento reale e relativo genera il vento apparente, il solo effettivamente efficace ai fini della produzione delle forze aerodinamiche propulsive. La direzione β del vento apparente può risultare assai diversa dalla direzione γ del vento reale, così come i moduli possono variare sensibilmente. La relazione tra queste grandezze è rappresentabile con il triangolo delle velocità; al fine di valutare il vento apparente per ogni direzione di rotta γ, è necessario conoscere la velocità effettiva che può sviluppare la barca in funzione del vento reale.
La vela utilizzata per la verifica della procedura è un gennaker asimmetrico, da usarsi nelle andatura portanti sul catamarano della classe International Tornado. A titolo di esempio, si possono estrapolare alcuni dati dalla figura 1.2 tratta da [1], che non tiene conto però dell’uso del gennaker perché antecedente alla sua introduzione.
Scegliendo un angolo di rotta γ = 90°, una velocità di vento reale VR=5 m/sec, dal diagramma in forma polare si può stimare il rapporto tra velocità barca e vento reale
β
VB/VR=1.3. La triangolazione della fig. 1.1 fornisce per il vento apparente i seguenti dati: VR=5 m/sec, VB=6.5 m/sec, VA=8.5 m/sec, angolo β=37.6°.
vento apparente VA vento reale VR
velocità barca VB
Figura 1.1: esempio triangolo delle velocità
Figura 1.2
Un approccio anche semplificato, non può non tenere conto di alcuni parametri, la cui definizione appare chiara dall’esame di una generica configurazione di equilibrio per uno scafo propulso a vela (fig. 1.3 e fig. 1.4). Essi sono:
Vettore velocità della barca VB
Vettore velocità del vento apparente VA
Angolo β tra vento apparente e velocità della barca Angolo di scotta δ
Portanza L e resistenza D aerodinamiche
Forza motrice nella direzione di moto Fm e forza laterale di sbandamento Fs Angolo di scarroccio λ
Portanza Lb e resistenza Db idrodinamiche
Esistono semplici relazioni che legano i parametri e le variabili sopra introdotte.
Angolo di prua βprua = β - λ Incidenza della vela α = (β – λ) – δ
Forza motrice Fm=L⋅sin(β)−D⋅cos(β) Forza di sbandamento Fs=L⋅cos(β)+D⋅sin(β)
L’analisi aerodinamica della vela rappresenta solo un aspetto della previsione delle prestazioni di una barca, in quanto necessariamente correlata al comportamento dello scafo in acqua. Qui preme sottolineare come uno studio aerodinamico della vela sia dominato dalla velocità del vento apparente Va, dall’angolo β e dall’angolo di scotta δ, mentre l’idrodinamica dello scafo sia dominata dalla velocità della barca Vb e dall’angolo di scarroccio λ. Conoscendo le forze aerodinamiche [ Fm , Fs ] = f (Va, β, δ) e quelle idrodinamiche [ Lb , Db ] = F(Vb , λ), si potrebbe stimare la velocità della barca, assegnando Va, β, δ ed imponendo l’equilibrio delle forze. Ciò presuppone tuttavia di conoscere il legame tra la velocità della barca, la forma dello scafo e l’angolo di scarroccio λ. Attraverso il triangolo delle velocità è possibile poi riferire la velocità della barca alla velocità del vento reale.
Un criterio per giudicare la prestazione di una imbarcazione a vela è quello di verificare la componente Vmg della velocità della barca nella direzione del vento reale. Dalla fig. 1.1 si vede che un bordeggio con un angolo di rotta rispetto al vento reale di 50° risulta il più efficace per risalire il vento nel minimo tempo, mentre un bordeggio con γ=130° fa guadagnare più rapidamente la boa sottovento.
Figura -1.3
1.2. Condizioni di simulazione: confronto con la galleria del
vento
Poiché il presente lavoro si pone l’obiettivo di costruire uno strumento per la previsione delle forze aerodinamiche che agiscono sulle vele, senza affrontare il problema delle forze idrodinamiche, si trascurerà la presenza dell’angolo di scarroccio λ e si assumerà come direzione di riferimento quella dell’asse di simmetria della barca. Anziché riferire la direzione del vento apparente VA rispetto al vettore effettivo velocità della barca VB, lo si riferisce all’asse di simmetria della stessa. All’angolo β si sostituisce (β-λ) e la forza motrice si valuta lungo l’asse di simmetria della barca, anziché lungo l’effettiva direzione di moto dipendente da λ, valore sconosciuto a meno di usare prove sperimentali ottenute in vasca. Ciò è illustrato nella fig. 1.5, ricavata da [1], dove la forza motrice Fx è stimata lungo l’asse della barca e la forza di sbandamento Fy nella direzione normale ad esso.
Le relazioni diventano, pertanto:
) cos( ) (β −λ − ⋅ β −λ ⋅ =P sen R Fx ) ( ) cos(β−λ + ⋅ β −λ ⋅ =P R sen Fy Figura -1.5
Questo è anche il modo di rappresentare le forze si misurano nella galleria del vento. La figura 1.6 tratta da [1], mostra schematicamente come il flusso rappresenti il vento apparente. Se il modello dello scafo può essere orientato simulando l’angolo (β-λ), successivamente la scelta dell’angolo di scotta δ definisce l’incidenza α =(β-λ)-δ delle singole vele. Si può scegliere l’angolo della prua (β-λ) e variare l’angolo di scotta, verificando come variano le forze e costruendo la polare relativa in termini di (CL,CD). Nella fig. 1.7 tratta ancora da [1] si vede come estrapolare i coefficienti di spinta e sbandamento relativamente al lasco stretto.
Figura -1.6
1.3. Ipotesi di lavoro relative alle grandezze aerodinamiche
In una navigazione reale intervengono piccole variazioni continue di intensità e direzione del vento reale, la variazione di velocità della barca per effetto del moto ondoso, le oscillazioni di rollio e beccheggio: tutti fattori che determinano una dinamica caratterizzata da fenomeni non stazionari. In particolare, la vela vedrà modificarsi l’angolo di incidenza e le forze risultanti si adatteranno alle nuove condizioni con un certo ritardo. Inoltre la barca assumerà un’inclinazione sottovento che dipenderà molto dall’intensità del vento e dall’andatura scelta per la navigazione.
Nell’ambito dello studio condotto ci si è limitati tuttavia all’analisi aerodinamica di una vela, senza prendere in considerazione gli elementi non stazionari sopra elencati. Inoltre si è trascurato lo sbandamento dell’imbarcazione, nell’ipotesi che resti piccolo.
Un altro elemento di analisi è rappresentato dal profilo verticale del vento reale. Esso non mantiene il modulo della velocità costante al variare dell’altezza. L’effetto dello strato limite terrestre è quello infatti di produrre un profilo di velocità in funzione della quota. Esistono diverse rappresentazioni matematiche di tale effetto. La conseguenza immediata su una vela è quella di modificare la direzione e l’intensità del vento apparente lungo l’altezza, modificando l’incidenza geometrica della generica sezione. Questo effetto, sovrapposto allo svergolamento geometrico di una vela tridimensionale, determina una variazione della distribuzione di portanza e quindi dei coefficienti CL e CD. Non tenere conto di ciò può allontanare molto le prestazioni calcolate da quelle reali. Nell’ambito di questo studio, invece, si è introdotto un profilo costante di velocità, sia perché ciò non pregiudica la costruzione della procedura iterativa, sia per poter eventualmente confrontare i risultati ottenuti con quelli di prove realizzate in gallerie non dotate di profilo del vento variabile.
1.4. Dalla design-shape alla flying-shape: un approccio
Tutte le considerazioni precedenti presupponevano la conoscenza della forma della vela. Il velaio disegna e costruisce un oggetto che ha una geometria nota in assenza di carichi. In navigazione, l’applicazione della reale distribuzione di pressione modifica la posizione e l’entità della freccia massima in ogni sezione orizzontale della vela. Una previsione delle prestazioni della vela deve quindi poter valutare come una geometria iniziale nota si deforma sotto l’azione dei carichi aerodinamici.
Il modello realistico e generale per la valutazione della nuova configurazione deve poi tenere conto della deformazione a trazione delle fibre che costituiscono il tessuto della vela, così come della rigidezza a flessione della stessa. Inoltre, un ruolo importante è assunto dalle condizioni geometriche al contorno, in quanto le vele possono essere inferite lungo la ralinga e lungo la base, oppure essere vincolate solo nelle bugne come nel caso di gennaker e spinnaker. Questo modifica il campo di spostamenti e la forma finale.
Per le vele da diporto si possono avanzare delle ipotesi semplificative. Nell’ambito delle vele di prua, come gennaker e spinnaker, si usano tessuti leggeri allo scopo di evitare che il peso stesso della vela la faccia cadere sull’attrezzatura, quando un vento leggero non è in grado di sostenerla. Inoltre devono essere vele stivabili facilmente, nonostante l’ampia superficie che sviluppano, ovvero ripiegabili su se stesse senza riportare danni alle fibre.nella fattispecie si è assunto quanto segue:
• La resistenza del tessuto è tale da trascurare, in prima approssimazione, l’allungamento delle fibre: ipotesi di deformazioni elastiche nulle
• La vela si ritiene infinitamente cedevole a flessione
• Si schematizza il comportamento della superficie con quello di una griglia di aste incernierate ai loro estremi, che chiamiamo nodi. Le aste si assumono rettilinee e infinitamente rigide.
• Dalla conoscenza della distribuzione delle pressioni si valuta un sistema di forze equivalente ed applicate nei nodi.
• L’unico contributo al lavoro delle forze esterne è rappresentato adesso dallo spostamento dei nodi, avendo supposto nullo l’allungamento delle aste. • Tra tutte le configurazioni geometriche possibili, l’insieme degli spostamenti
dei nodi coerenti con la condizione di aste rigide. e tali da rendere massimo il lavoro delle forze esterne, rappresenta la soluzione cercata o flying-shape, con area della superficie invariata ([2],[3]).
• Una volta raggiunta la configurazione finale, si può pensare di eseguire un’analisi strutturale per valutare l’allungamento delle fibre, che risulta di ordine inferiore rispetto agli spostamenti dei nodi della griglia strutturale. L’ipotesi di vela infinitamente cedevole a flessione, ovvero con rigidezza flessionale nulla, può essere contestata nel caso di quelle grosse vele da regata costruite con ampio uso di fibre di carbonio e kevlar affogati in una matrice resinosa. Inoltre l’approccio che utilizzi il lavoro delle forze esterne è volto ad offrire un’alternativa all’analisi agli elementi finiti, che richiede ampia capacità di calcolo. Infatti il nostro obiettivo è quello di realizzare un
codice “leggero”, cercando il giusto compromesso tra la dimensione della griglia necessaria a descrivere il comportamento della superficie velica, ed il tempo di valutazione della superficie deformata.
Nelle valutazioni numeriche svolte, la stessa vela è stata sottoposta alle seguenti condizioni di vincolo:
• ralinga e base inferite • ralinga inferita
• solo angoli di bugna vincolati
Nella seconda e terza condizione si può mantenere la bugna della scotta fissa nella posizione iniziale, oppure permetterle di muoversi sulla superficie sferica di raggio uguale alla lunghezza costante della scotta, ed incernierata nella posizione del bozzello in coperta. Questa condizione di vincolo determina un angolo di scotta finale diverso da quello iniziale.
Benché ciò abbia solo scopo dimostrativo, perché il gennaker è vincolato solo nelle bugne, si sono ottenuti risultati con differenze rilevanti. Vincolando il gennaker sulla ralinga e sulla base, la parte inferiore della vela si deforma sottovento, con l’effetto di aprire la balumina e richiamare sopravento la parte superiore della vela stessa, associata ad una chiusura della parte superiore della balumina. Il lavoro delle forze esterne è piccolo e dell’ordine di 5000 N*mm, in quanto i contributi della parte superiore ed inferiore della vela hanno segni opposti e gli spostamenti massimi sono dell’ordine di 100 mm. Eliminando uno dei vincoli geometrici od entrambi, la vela si estende sottovento in tutta la sua altezza, avvicinando la balumina e la ralinga tra di loro e richiamando in alto la base. In questi casi il lavoro delle forze esterne è assai maggiore e dell’ordine di 10^5 N*mm, mentre gli spostamenti arrivano anche a 500 mm.
1.5. Schema generale della procedura completa
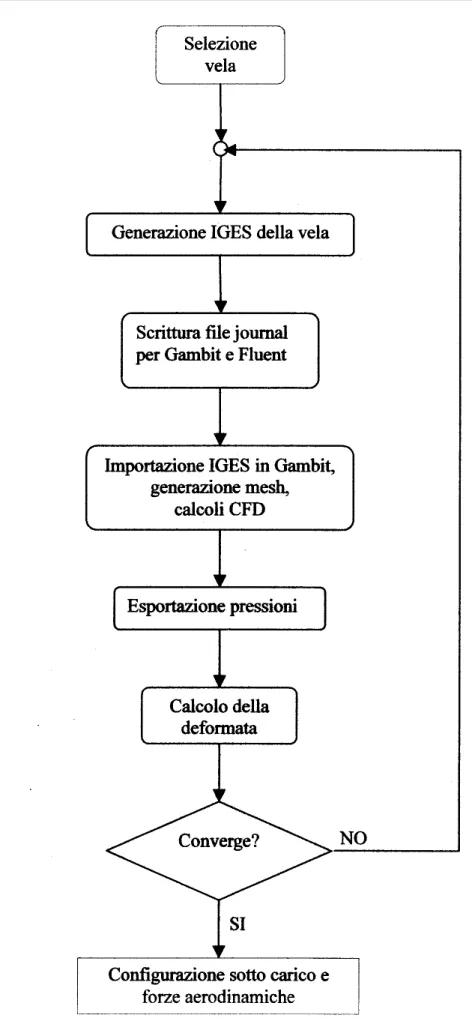
La stima della configurazione finale della vela, con i vincoli geometrici imposti e le condizioni note di vento apparente Va, angolo di prua β, angolo di scarroccio λ e angolo di scotta δ, passa necessariamente attraverso un ciclo iterativo. Come illustrato nel diagramma di flusso (fig. 1.8), si realizza il ciclo aeroelastico statico qui di seguito esposto:
• la configurazione iniziale è nota e salvata in un file dat, che deve essere letto ed interpretato.
• dalla conoscenza dei nodi, semplici coordinate di punti, si deve costruire, mediante un interpolatore, la superficie. Gli strumenti più idonei sono risultati le funzioni B-Spline [4],[5],[6].
• i parametri costruttivi della superficie permettono di definire l’immagine della vela in un formato IGES, coerente con le specifiche Iges 5.3 [7].
• l’immagine può essere importata in Gambit, software di pre-processing finalizzato alla generazione di una mesh e alla dichiarazione delle condizioni al contorno per il solutore fluidodinamico.
• con il programma commerciale FLUENT.inc si stimano le pressioni sulla faccia sopravento e sottovento della vela, salvandoli in file con estensione .dat.
• si assegna una griglia strutturale esemplificativa della vela e si determina il sistema di forze applicate nei nodi, input necessario per la fase di ottimizzazione.
• con il processo di ottimizzazione si valutano gli spostamenti dei nodi [8],[9],[10],[11].
• si confronta la superficie ottenuta con quella precedente, e, se i criteri di convergenza del ciclo iterativo sono soddisfatti, si assume la nuova configurazione come definitiva. In caso contrario essa rappresenta la nuova configurazione di partenza per la quale calcolare i carichi e l’ulteriore deformata.
1.6. Particolari della procedura
Implementare questa procedura significa affrontare e risolvere alcuni aspetti non ancora menzionati. Essi sono:
• stabilire se dall’ambiente MATLAB, una piattaforma di lavoro agile e tale da consentire una programmazione suddivisa in moduli a cui destinare i singoli compiti, si possono aprire applicazioni esterne come si farebbe dal prompt. • definire se i programmi GAMBIT e FLUENT, con cui si deve interagire,
accettano comandi da routine a loro esterne e sono quindi idonei ad essere utilizzati in un ciclo di calcolo automatico senza intervento dell’operatore per il loro avvio.
• definire il sistema di riferimento in cui inserire la vela.
• importare il file con i dati della vela interpretandone la struttura. • rappresentare i punti acquisiti in forma matriciale.
• determinare i parametri che permettono la riproducibiltà della superficie che interpola i punti dati e verificare il rispetto delle condizioni atte a rendere applicabile il processo di interpolazione (condizione iso-u e iso-v).
• valutare l’errore che si compie nel riprodurre la superficie e verificare che non modifichi i risultati dell’analisi fluidodinamica.
• applicare le specifiche IGES 5.3 per rappresentare la superficie in un formato grafico facilmente leggibile dal pacchetto software aerodinamico.
• applicare una metodologia per definire la mesh aerodinamica, tenendo conto delle successive deformazioni della vela. Queste non devono generare sottovolumi discretizzabili con eccessiva deformazione degli elementi tetraedrici regolari.
• verificare la applicabilità del solutore aerodinamico al nostro caso.
• imporre al programma generale che gestisce le singole fasi di attendere il termine della fase di calcolo CFD implementata dai codi specifici.
• importare i dati relativi alle pressioni, con un interprete del file creato dai programmi CFD.
• stabilire il criterio per assegnare ai nodi della griglia strutturale il sistema di carichi, valutandone intensità e direzione.
• scegliere un algoritmo di ottimizzazione efficiente in termini di tempo di calcolo rispetto alla dimensione della griglia. Definire come funzione obiettivo il lavoro delle forze esterne cambiato di segno, ed impostare la ricerca di minimo condizionato, rispettando i vincoli imposti sulla inestensibilità delle aste, con una tolleranza accettabile.
• individuare i criteri di convergenza per l’algoritmo di ottimizzazione, sensibilizzandoli al caso in esame e fissando un set di tolleranze “sensate”, ovvero realizzabili dall’algoritmo per il caso in esame. Questo significa stabilire quando accontentarsi di una soluzione, sapendo che criteri di convergenza più stretti implicherebbero tempi di calcolo ben maggiori, ma migliorando ben poco la soluzione.
• stabilire i criteri di convergenza del loop di calcolo al fine di stabilire se accettare o no la configurazione calcolata con la fase di ottimizzazione. • sviluppare un programma con struttura modulare, diviso in sottoparti, alle
quali attribuire compiti diversi e capaci di scambiarsi variabili e dati. Lasciare traccia delle scelte dei parametri iniziali, delle condizioni imposte e del processo di calcolo in report specifici generati dal programma.
• consentire una definizione semplice del caso in esame, ovvero la scelta di tutti i parametri in gioco necessari al lancio della procedura ed alla definizione di tutti gli aspetti connessi: dalla cartella in cui salvare i dati al posizionamento della vela, alla scelta delle tolleranze per i criteri di convergenza, etc.
Nei sottoparagrafi seguenti si forniscono note più dettagliate per ognuno dei punti sopra elencati. Alcuni di questi argomenti saranno poi oggetto di trattazione specifica nei capitoli successivi o nelle appendici.
1.6.1 Scelta di MATLAB v6.2
L’uso dell’ambiente di programmazione Matlab consente la costruzione di procedure articolate, suddivise in varie “function”, che possono essere richiamate facilmente per svolgere operazioni peculiari e fornire gli output richiesti. ciò permette di costruire strumenti di calcolo complessi ed articolati, che possono essere richiamati più volte. Cosa importante ai nostri fini, MATLAB consente di aprire applicazioni esterne come si farebbe dal prompt, grazie ai seguenti comandi [12]:
• il carattere speciale “ ! ”: davanti ad una stringa indica che ciò che segue è un comando per il sistema operativo e consente di avviare una applicazione senza uscire da Matlab. Utilizzato con la stringa che invoca una particolare applicazione, Matlab attende che l’applicazione si apra, esegua le operazioni richieste implicite nella stringa di comando e, solo quando ha completato le operazioni o viene chiusa, la routine di Matlab procede con le righe di comando successive. Purtroppo questo non accade per tutte le applicazioni, come verrà spiegato in seguito.
• il comando “ dos ” nella forma [status, risultati] = dos(‘ stringa di comando’), quando l’applicazione da aprire deve fornire dei risultati. La variabile status = 0 se ha avuto successo l’apertura dell’applicazione. Per l’uso combinato con il carattere & si rimanda a “ Matlab Function Reference” della guida online.
• il comando “eval“ nella forma eval(‘stringa’), attiva la stringa trasformandola in un comando.
Per la struttura delle stringhe che è necessario scrivere se si desidera avviare GAMBIT e FLUENT, si può consultare la guida dei rispettivi programmi alle voci “STARTUP COMMAND” [13] e “STARTUP OPTIONS” [14]. Di seguito è descritto brevemente come sono state usate nel caso specifico.
1.6.2 Avvio e chiusura di GAMBIT e FLUENT
Caratteristica importante di questi due programmi è la capacità di editare un file testo in cui registrare la successione dei comandi corrispondenti ad una sessione di lavoro condotta attraverso le rispettive interfacce grafiche. Tali file possono essere caricati ed eseguiti, ripetendo le operazioni in successione e riproducendo la sessione di lavoro che li ha generati. Definita quindi una procedura, essa si può eseguire ogni volta che si aprono le applicazioni GAMBIT e FLUENT, semplicemente usando come input i file journal alla generica iterazione del loop di calcolo.
La stringa di comando che consente di attivare GAMBIT da MATLAB è la seguente:
str_g=['! gambit id gambit_it',num2str(ind_loop),' init',path_jou_g,' -new'];
Si apre una sessione di lavoro gambit_it1, gambit_it2, etc., al variare dell’indice “ind_loop” dell’iterazione del loop di calcolo; si leggono le istruzioni per importare la vela, costruire il dominio, definire la mesh, esportare quest’ultima all’esterno. Tutto questo è scritto nel file journal il cui nome è stato preventivamente salvato nella stringa “path_jou_g” e che costituisce il vero input. Prima di chiudersi, GAMBIT genera un file journal, un file .trn ed un file .dbs con lo stesso nome della sessione di lavoro gambit_it1,
etc.
Il file journal contiene le operazioni eseguite in cascata dal programma ed è una copia del file journal assegnato come input; il file .trn contiene avvisi, eventuali errori o conferma dell’ esito positivo delle singole operazioni; il file .dbs contiene la geometria generata e la sua apertura consente di visualizzare oggetti grafici e geometrici generati senza ripetere le operazioni in cascata.
La stringa di comando che consente di attivare FLUENT da MATLAB è:
str_f=['! fluent 3d -i ',path_jou_f]; eval(str_f); % lancia fluent
L’input è costituito dalla stringa “ path_jou_f “, contenente il percorso del file journal con le istruzioni per FLUENT, ovvero quale mesh importare, quale solutore usare, quali dati esportare, dove scriverli.
La chiusura automatica di GAMBIT è possibile usando come ultima riga del file journal la stringa “ end force” .
La chiusura automatica di FLUENT è possibile usando come ultima riga del file journal la stringa “ exit” .
1.6.3 Sistema di riferimento
SISTEMA ASSI-BARCA (fig. 1.10):
origine a quota z = 0;
asse x diretto nel verso opposto alla velocità della barca ( se l’angolo di scarroccio λ=0 coincide con l’asse di simmetria della barca);
asse z verso l’alto;
La vela può essere traslata secondo x,y,z, e ruotata in funzione della sua natura. Se si tratta di uno spinnaker può essere ruotata intorno all’asse verticale passante per la penna, al fine di simulare l’orientamento del tangone rispetto alla direzione poppa-prua. Qualsiasi altra vela viene ruotata intorno alla retta congiungente la mura con la penna. Nel caso per esempio di un gennaker o un fiocco è possibile simulare l’effetto della variazione dell’angolo di scotta δ.
1.6.4 File di origine della vela e sua importazione nel programma Le vele vengono disegnate con programmi specifici. Uno strumento diffuso è il programma Autometrix Sailmaking Software 6, che consente di generare superfici veliche distribuendo i ferzi secondo l’esperienza e le esigenze del velaio. La pannellatura può risultare complessa e la geometria dei ferzi compare nella struttura del file .rlx in cui il programma salva l’output.
Figura -1.9
Per gestire la superficie nel programma creato per lo studio qui descritto, è necessario riferirsi ad una griglia con elementi quadrangolari. Quindi è necessario, una volta generata la superficie in AUTOMETRIX, con una pannellatura qualunque, cancellare l’organizzazione originale dei ferzi e simulare per la stessa superficie una suddivisione in ferzi orizzontali. Questo consente di creare un file .rlx la cui struttura, se letta ed interpretata dal programma, genera una griglia adatta ad essere trattata con le funzioni B-Spline. Il risultato dell’importazione è quello rappresentato nella figura 1.10.
Figura -1.10
1.6.5 Rappresentazione rettangolare della griglia
Ciò che si conosce al momento della lettura del file .rlx è un insieme di punti distribuiti sulle intersezioni di linee orizzontali e verticali. Quelle verticali convergono in un unico punto: la penna. Le coordinate dei nodi vengono raccolte in tre matrici rettangolari, immaginando la penna come un punto con molteplicità uguale al numero delle linee verticali. Si crea una matrice con tutte le coordinate X dei nodi, una matrice per le Y, una per le Z. All’interno delle singole matrici i dati vengono ordinati per colonne: la prima colonna contiene la coordinata scelta e corrispondente ai punti della base, l’ultima colonna la ripetizione della coordinata della penna. Dall’alto verso il basso sono rappresentati i punti della stessa linea orizzontale ordinati dalla ralinga alla balumina (Si veda, a riguardo, il paragrafo 4.3).
Questa organizzazione dei dati è il riflesso delle rappresentazioni usate per costruire gli algoritmi di interpolazione nei testi specifici [4],[5],[6].
1.6.6 Calcolo dei parametri necessari all’interpolazione della superficie
La prima condizione per interpolare la superficie, è disporre di una griglia formata da linee iso-u e iso-v, nel senso descritto qui di seguito. I nodi di tale rappresentazione costituiscono la griglia di riferimento, interpolando la quale è possibile calcolare le
coordinate (x,y,z) di un qualunque punto della superficie se si conoscono le sue coordinate parametriche [u,v].
Il criterio con cui le linee iso-parametriche sono create è quello di utilizzare variabili parametriche (u,v) comprese nell’intervallo [0,1] per descrivere la posizione dei nodi. Dallo spazio geometrico euclideo e tridimensionale si passa ad un dominio bidimensionale e rettangolare normalizzato. La griglia 3D è trasformata in una 2D, composta di linee equispaziate e normali tra di loro. In essa il valore delle ascisse è “u”, quello delle ordinate “v”. La corrispondenza tra un punto (x,y,z) sulle linee 3D che appartengono alla superficie ed un punto [u,v] del dominio rettangolare è stabilita da una funzione che può avere forme diverse. Nello specifico, si è utilizzato il metodo della lunghezza della corda: i nodi di una linea verticale compongono una spezzata di lunghezza Lv nota, che approssima quella dell’arco effettivo disegnato sulla superficie curva. Un generico punto su tale linea definisce una spezzata costituita da lui stesso e da tutti i nodi a lui inferiori. La lunghezza Lv* associata a tale punto definisce il valore della variabile parametrica v=Lv*/Lv del dominio 2D. Analogamente, se il punto è pensato appartenente ad una linea che unisce orizzontalmente una fila di nodi della griglia, la lunghezza Lh della spezzata orizzontale e quella Lh* della spezzata parziale dei nodi che precedono, definiscono la variabile parametrica u = Lh*/Lh. Ne risulta che i nodi a cui è associato lo stesso valore u sono allineati lungo una linea verticale iso-u, mentre quelli a cui è associato lo stesso valore v appartengono ad una linea orizzontale iso-v. Per ogni punto della superficie passa una ed una sola curva iso-u ed una ed una sola curva iso-v.
Alle linee rette iso-u e iso-v del dominio rettangolare 2D, perpendicolari ed equispaziate tra di loro, corrispondono linee curve iso-u e iso-v sulla superficie effettiva della vela. Nel dominio 3D una linea iso-u ed una iso-v sono normali solo nel loro punto di intersezione.
Usare una griglia con tali caratteristiche è una premessa importante per interpolare correttamente la superficie.
Conoscere i nodi della base significa fissare la successione monotona crescente dei valori della coordinata u associata ad ogni linea curva iso-u della vela, quelle convergenti nella penna. Conoscere i nodi sulla ralinga significa fissare la successione monotona crescente dei valori v delle linee curve iso-v sulla vela, quelle normali alla ralinga ed alla balumina.
La fase successiva consiste nel determinare i PUNTI DI CONTROLLO. Essi
iso-u e iso-v, e rappresentano i coefficienti P della relazione che consente di passare da [u,v] a (x,y,z).
∑∑
∑∑
= = = = ⋅ ⋅ ⋅ ⋅ ⋅ = m i n j ip jq i j m i n j ip jq i j i j w v N u N P w v N u N v u S 0 0 , , , 0 0 , , , , ) ( ) ( ) ( ) ( ) ,( (eq. della superficie)
S(u,v) è il punto (x,y,z) della superficie associato a (u,v)
Ni,p e Nj,q sono le funzioni che costituiscono una base della rappresentazione o B-Spline
Pi,j =(x,y,z)i,j sono i punti di controllo, tanti quanti i nodi della griglia assegnata
Wi,j i pesi
Si adotta la forma in cui i pesi sono unitari ed il denominatore assume il valore 1.
Si capisce che il cuore della fase di interpolazione è rappresentato da:
• l’algoritmo che, assegnata la griglia di nodi da interpolare, valuta i punti di controllo Pi,j .
• l’algoritmo che calcola N(u) e N(v) secondo la loro definizione. • l’algoritmo che valuta la funzione S(u,v) definita sopra.
Per sviluppare questi aspetti si è fatto uso in particolare modo di [5].
1.6.7 Errore di interpolazione della superficie
Noti dei punti appartenenti alla vela, si possono valutare le loro coordinate parametriche. Usando queste come input degli algoritmi sviluppati, si possono calcolare le coordinate (x,y,z) associate alle coppie (u,v). Confrontando i valori calcolati con quelli noti, si può stimare l’errore nella riproduzione della superficie interpolando una griglia di riferimento. Il file della vela in formato autometrix .rlx, contiene molti punti, che non sono stati utilizzati per importare la griglia con cui interpolare la superficie. Utilizzando proprio questi come campione, si è stimato l’errore compiuto dagli algoritmi nel restituire le coordinate di tali punti partendo da coppie (u,v) esatte. Per i punti della ralinga si ottiene il risultato rappresentato in fig. 1.11.
Figura –1.11 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 -1 0 1 2 3 4 5 coordinata parametrica v errore sulla linea verticale 1
erroreX erroreY erroreZ
I dati sono ottenuti per una griglia (21 x 11), costituita cioè da 21 linee orizzontali e 11 verticali. L’errore in y raggiunge i 5 mm, che per una ralinga di circa 8 m rappresenta un’approssimazione accettabile. Aumentando la dimensione della griglia, l’errore si riduce notevolmente. E la ralinga rappresenta il caso peggiore, perché sulle altre linee verticali della griglia l’errore in y raggiunge solo i 3 mm.
1.6.8 Uso delle specifiche IGES 5.3
La rappresentazione della superficie attraverso funzioni B-Spline mette a disposizione tutti i parametri necessari alla generazione dell’immagine della vela in formato IGES. Il formato IGES accetta infatti come “ entities” le superfici generate con B-Spline [7]. Si tratta di scrivere un file di testo in cui siano elencate, secondo regole opportune, le coordinate dei nodi della base e della ralinga, oltre alle coordinate dei punti di controllo e ai valori dei pesi (assunti come unitari). Un programma in MATLAB che utilizzi le funzioni “fopen” e “fprintf” con le opportune opzioni [12], può fungere da editore di file .igs.
1.6.9 Strategia per la creazione della mesh aerodinamica
Un aspetto importante per la definizione della mesh aerodinamica è proprio la deformazione della superficie velica rispetto alla configurazione precedente. Lo spostamento della freccia massima, l’avvicinamento di ralinga e balumina, l’aumento della curvatura in alcune sezioni, può generare volumi che non hanno più delle buone caratteristiche al fine della loro discretizzazione con elementi tetraedrici. Un tale evento può
far fallire la fase di creazione della mesh o definire mesh di cattiva qualità per l’analisi fluidodinamica. In entrambi i casi la procedura iterativa si interrompe. Poiché esiste l’esigenza di creare una griglia di nodi più fitta nelle vicinanze della vela, è necessario suddividere il dominio in sottovolumi. La mesh deve poter essere condizionata, ovvero vincolata a infittirsi anche secondo certe direzioni importanti. La strategia adottata è stata la seguente:
• si valuta il centro della corda della base proiettata sul piano z = 0.
• si traccia un cerchio centrato in tale punto e di raggio tale da contenere la proiezione della vela sul piano orizzontale.
• si individuano due rette tangenti a tale cerchio, rispettivamente normali alla direzione del vento ed alla retta tangente alla base nel bordo di uscita. Si estrudono verso l’alto ottenendo due piani.
• si proiettano la ralinga e la balumina su tali piani, definendo così due superfici contigue alla vela.
• si prolungano queste superfici fino al piano z=0 e fino ad una quota di circa 1,5 volte l’altezza della vela.
• si crea un diaframma, comprendente la vela, con funzione separatrice tra due sottovolumi in cui poter infittire la mesh.
• un cilindro con raggio di almeno 5 volte la corda della vela definisce la porzione di dominio dove poter creare una mesh meno densa e tale da poter ritenere le condizioni sulla frontiera uguali a quelle di flusso indisturbato.
La scelta di schematizzare la vela senza spessore costringe a rappresentarla come porzione della superficie separatrice tra due sottovolumi, attribuendole poi la condizione al contorno di tipo “wall”.
I sottovolumi con le superfici in comune opportunamente orientate rispetto alla vela, non rischiano di interferire con la superficie della vela, né di creare zone con angoli acuti, difficili da discretizzare con elementi geometrici regolari.
1.6.10 Affidabilità del codice di calcolo FLUENT
I lavori preesistenti confermano l’applicabilità del codice di calcolo FLUENT per descrivere, comprendere e valutare la fisica delle vele. Si fa riferimento in particolare alle tesi [3] e [15].
1.6.11 Pausa di MATLAB durante la fase di calcolo CFD
Purtroppo accade che una routine scritta e lanciata in MATLAB per l’apertura in sequenza di GAMBIT e FLUENT non operi correttamente, nel senso che attende la chiusura del programma GAMBIT prima di richiamare ed aprire FLUENT, ma, una volta fatto ciò, prosegue con le istruzioni successive senza attendere la chiusura di FLUENT. Ciò induce un errore di procedura, perché la fase di ottimizzazione ha inizio senza poter importare i dati relativi alle pressioni.
La soluzione consiste nel vincolare in un ciclo WHILE la routine di MATLAB che controlla le varie fasi della procedura, ponendo come condizione di proseguimento delle operazioni la scrittura completa dei file dat con i valori delle pressioni da parte di FLUENT.
Si è ritenuto inoltre opportuno inserire una pausa di qualche secondo tra la chiusura di GAMBIT e l’apertura di FLUENT, per evitare la sovrapposizione delle licenze ed impegnarne così una soltanto.
1.6.12 Sistema di forze applicate ai nodi della griglia
L’analisi CFD determina in ogni nodo della mesh che riproduce le due facce della superficie velica, il valore della pressione statica. La differenza tra la faccia sopravento e quella sottovento, in corrispondenza dello stesso nodo della vela, viene salvata in una variabile opportuna. Naturalmente la griglia strutturale, ovvero l’insieme di aste incernierate ed inestensibili, per il calcolo della deformata della vela, non coincide con quella aerodinamica. Ciò avviene per più motivi:
• Per la necessità di limitare il numero di aste, ovvero delle equazioni di vincolo relative alla condizione lunghezza i-esima asta costante. Ciò influenza sia il tempo di calcolo della fase di ottimizzazione, sia la precisione dell’algoritmo. Un numero elevato di equazioni è più sensibile alla propagazione dell’errore numerico. Si è verificato infatti che un numero non molto elevato di aste (20 * 20) può generare una procedura che fornisce ad ogni iterazione una soluzione, in termini di lavoro delle forze esterne, che oscilla di qualche unità intorno ad un valore medio, facendo fallire i test di convergenza, se si sono scelte tolleranze troppo restrittive.
• Perché conoscere lo spostamento di un insieme limitato di punti della superficie consente di interpolare la stessa con un errore accettabile. Ad esempio, è apparso sensato costruire una mesh della vela per il calcolo CFD con circa 22000 nodi, associati a triangoli equilateri di lato 50 mm, al fine di
valutare con sufficiente approssimazione l’aerodinamica della vela. Nel passaggio alla fase di ottimizzazione, per il calcolo della deformata, con una griglia di dieci linee orizzontali per cinque verticali è possibile valutare lo spostamento di cinquanta nodi ed interpolare con essi la nuova superficie producendo un errore dell’ordine del mm.
Per la stima delle forze esterne applicate ai nodi della griglia strutturale, come sarà descritto meglio in seguito, si segue la seguente procedura:
• si definisce un’area di influenza per ogni nodo.
• si estrapolano le pressioni relative alle singole aree di influenza.
• la forza associata al nodo è rappresentata dall’integrale delle pressioni su tale area, ma schematicamente si preferisce estrapolare il valore del nodo CFD più vicino al nodo della griglia strutturale e considerare la pressione uniforme su tutta l’area di influenza: il prodotto tra il valore estrapolato e l’area si assume uguale al carico nel nodo della griglia strutturale. La valutazione risulta più semplice con differenze non sensibili rispetto alla tradizionale tecnica di integrazione.
• la direzione della forza si fa coincidere con quella della normale alla superficie nel nodo della griglia strutturale.
1.6.13 Algoritmo di ottimizzazione
Si è definita la griglia di aste e si sono valutati i carichi nei nodi. La configurazione di equilibrio associata a tali carichi coincide con quella che corrisponde al massimo del lavoro delle forze esterne. Assumendo come funzione obiettivo il lavoro delle forze esterne cambiato di segno, si ricerca la soluzione di un problema di minimo condizionato applicato alla nuova funzione obiettivo. I vincoli, imposti alla soluzione del problema sono:
• aste interne inestensibili.
• bordo libero della vela: aste inestensibili, estremi vincolati.
• bordo vincolato (ralinga e/o base inferita): posizione dei nodi costante
• possibili vincoli per la bugna della scotta: fissa o costretta a muoversi sulla superficie sferica definita dalla lunghezza della scotta e dal punto di scotta sulla barca.
Ad ogni condizione di vincolo corrisponde un numero di equazioni diverso, che aumenta al crescere dei lati vincolati della vela. Se un lato è libero, ad ogni asta sul bordo corrisponde una condizione non lineare nelle coordinate dei nodi: Lunghezza = Lo; se il lato
è vincolato la condizione è espressa da tre equazioni lineari per nodo: x = Xo, y = Yo, z = Zo.
Il problema si presenta nella sua formulazione generale così:
L’algoritmo sviluppato per la ricerca del minimo condizionato è descritto nel capitolo 5. Si accenna qui solo al fatto che l’approccio adottato scompone la ricerca di un minimo globale condizionato in una successione di ricerche di minimi globali non condizionati, modificando opportunamente la funzione obiettivo. Questa tecnica è nota come Sequential Unconstrained Minimization Techniques e la rielaborazione della funzione obiettivo è stata fatta con il metodo dei moltiplicatori di Lagrange.La ricerca del minimo globale non condizionato viene condotta con un metodo noto come Variable Metric Method. In esso, data una configurazione di partenza, si sceglie opportunamente una direzione di ricerca del minimo. Muovendosi lungo tale direzione si cerca un minimo locale, da cui si parte per una nuova ricerca, modificando opportunamente la direzione. Iterando il processo si raggiunge il minimo globale.
Per la stesura dell’algoritmo si è seguito il flusso descritto in [8]. Una tale tecnica risolutiva ha bisogno dei seguenti criteri di convergenza:
• tolleranza sulla funzione obiettivo modificata. • tolleranza sulla soluzione X (posizione dei nodi).
• tolleranza sul gradiente della funzione obiettivo modificata. • tolleranza per la ricerca di minimo locale.
• limite alle iterazioni.
• tolleranza sulla funzione obiettivo originale.
1.6.14 Criteri di convergenza del ciclo di calcolo
Acquisita una configurazione, la si confronta con quella precedente. Sono facilmente ottenibili due parametri:
• lo spostamento massimo dei nodi della griglia strutturale per l’ultima configurazione calcolata (ad es. < 5 mm).
• il rapporto tra il lavoro di deformazione valutato alla generica iterazione e quello calcolato alla prima iterazione (ad es. < 5/100).
Limitando questi parametri ad opportuni valori, si ottengono i criteri per stabilire se la vela converge ad una configurazione di equilibrio.
1.7. Bibliografia
[1] C.A. Marchaj, Aero-idrodinamica della vela, Mursia,1987
[2] T. Charvet, F. Hauville, S. Huberson, Numerical evaluation of the
flow over sails in real sailing conditions, Journal of Wind
Engineering and Industrial Aerodynamics 63 (1996) 111 - 129
[3] M. Scarponi, Progettazione di vele per imbarcazioni da diporto
(2003), Tesi di laurea in Ingegneria Meccanica, Università degli
Studi di Perugia
[4] G. Farin, Curves and Surfaces for Computer Aided Geometric
Design. A Practical Guide,Academic Press Inc.
[5] C. de Boor, A Practical Guide to Splines, Springer Verlag
[6] M. Mortenson, Modelli geometrici in computer graphics, McGraw Hill,1989
[7] The Initial Graphics Exchange Specification (IGES) Version 6.0
(2001)
[8] G. N. Vanderplaats, Numerical Optimization Techniques For
Engineering Design, McGraw Hill Book Company,1984
[9] M. Minoux, Mathematical Programming. Theory and Algorithms, John Whiley And Sons, 1986
[10] P. Gill, W. Murray, M. H. Wrigth, Practical Optimization, Academic Press, 1981
[11] W. Zangwill, Nonlinear Programming. A Unified Approach,
Prentice Hall Inc , 1969
[12] Matlab 6 Reference Guide, The MathWorks Inc., Natick (MA),
[13] Gambit Modeling Guide, Fluent Inc., Lebanon - USA, 2002
[14] Fluent User’s Guide, Fluent Inc., Lebanon - USA, 2002
[15] A. Giorgio, Analisi numerica di vele tridimensionali (2001), Tesi di laurea in Ingegneria Aeronautica, Dip. Ing. Aerospaziale,