Introduzione
Durante operazioni nelle quali è richiesto un grado di precisione elevato1, l’impossibilità di ottenere un’adeguata accuratezza può far nascere delle limitazioni.
I risultati di alcune procedure possono essere danneggiati da un punto di vista qualitativo, altri addirittura compromessi.
Una delle principali cause della mancanza di precisione e di ripetibilità del movimento chirurgico può essere dovuta ai piccoli spostamenti involontari della mano, quali quelli dovuti all’effetto del tremore fisiologico umano.
Pur trattandosi di traslazioni indesiderate minime, tuttavia, in alcuni particolari applicazioni, come la chirurgia vitroretinale, condizionano pesantemente l’esito dell’intervento.
Il tremore è una contrazione muscolare ritmica ed involontaria, caratterizzata dalle oscillazioni di una parte del corpo. E' il più comune di tutti i movimenti involontari e si differenzia essenzialmente dagli altri disturbi motori2 per la sua ritmicità.
Il tremore è originato da contrazioni sincrone di muscoli antagonisti, alternate o irregolari. Esso può interessare varie parti del corpo come le mani, le strutture facciali, le corde vocali, il tronco ed i piedi. La maggior parte dei tremori, tuttavia, si presentano nelle mani. Il tremore accompagna spesso i disordini neurologici connessi con l'invecchiamento e, anche se non presenta una minaccia per la vita dell'individuo, può provocare una parziale inabilità funzionale.
1 Quali, ad esempio, gli interventi di microchirurgia oftalmica e neurologica. 2
Appare, dunque, evidente come l’introduzione di una serie di strumenti innovativi per la chirurgia assistita possa migliorare qualitativamente l’intervento.
Lo studio intrapreso in questa tesi si inserisce nella direzione suddetta, attraverso la progettazione di uno strumento attivo per la compensazione del tremore fisiologico, in grado di mantenere un elevato grado di retroazione tra il chirurgo e l’operazione stessa e, al tempo stesso, di migliorare le prestazioni necessarie a raggiungere il quadro clinico auspicato.
Questo lavoro è la prosecuzione di una tesi che è stata sviluppata da un precedente candidato al titolo di Dottore in Ingegneria nel corso dell’anno accademico 2000/01, finalizzata alla progettazione di uno strumento attivo microchirurgico.
Recentemente, il Prof. Cameron Riviere ha progettato e realizzato un prototipo di bisturi meccatronico per la cancellazione dei movimenti involontari della mano presso l’Università di Carnegie Mellon.
Il primo strumento di Riviere, denominato Micron, non è, tuttavia, in grado di compensare gli spostamenti maggiori di 100 µm lungo l’asse longitudinale dell’utensile e, quindi, non rispetta le specifiche del tremore fisiologico che prevedono uno spazio di lavoro che si spinge fino ai 152 µ, come testimoniano (Vaillancourt et al., 2003; Barrientos et al.; Riviere et al., 1998).
Il progetto (Grassei, 2001), invece, riusciva ad incrementare il suo campo di azione fino a 158 µm, misura appena superiore alla specifica prima citata, senza, però, sfruttare nessun effetto d’amplificazione del movimento, come, invece, era stato proposto lungo gli altri due gradi di libertà traslazionali dell’utensile chirurgico, giacenti sul piano ortogonale al suo asse longitudinale.
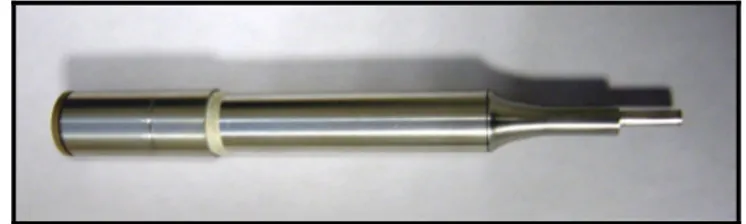
Partendo dal precedente lavoro di tesi e dall’analisi del lavoro di Riviere e colleghi, si è potuto arrivare alla progettazione, all’integrazione ed alla prototipazione (vedi Fig. I-1) della nuova versione di bisturi, modernizzata nelle sue componenti, ma anche radicalmente modificata proprio a vantaggio dell’estensione del suo spazio di lavoro.
A seguito di un’analisi di calibrazione dei sensori e della realizzazione di un sistema di controllo, il bisturi è arrivato alla sua prima versione, completa e funzionante, pronto per essere testato mediante un protocollo di prove che ne testeranno il grado di efficienza nell’attenuazione dell’errore introdotto dal tremore fisiologico.
Il lavoro di questa tesi è stato svolto presso il Polo Tecnologico Valdera della Scuola Superiore Sant’Anna e, in particolar modo, all’interno del Crim Lab3 e dell’Arts Lab4. Gli argomenti trattati all’interno della tesi sono i seguenti:
CAPITOLO I: Si tratta di un’analisi approfondita sullo stato dell’arte nel campo della chirurgia assistita. Si spazia all’interno della chirurgia teleoperativa (vedi Fig. I-2) che provvede alla compensazione del tremore fisiologico, ma che possiede anche altre caratteristiche peculiari5.
Figura I - 2: Sistema teleoperativo Zeus.
Oltre a questi due strumenti chirurgici, sono analizzati in dettaglio gli strumenti attivi.
In particolare, Micron (vedi Fig. I-3), ideato, realizzato e testato presso l’Università di Carnegie Mellon dal Prof. Cameron Riviere e dal suo staff.
3 Centro di Ricerca in Microingegneria. 4 Advanced Robotics Technology & Systems.
Figura I - 3: Micron, prototipo realizzato presso la Carnegie Mellon University.
CAPITOLO II: Si definiscono le caratteristiche del tremore, evidenziando la sua natura periodica quasi-sinusoidale.
Si provvede a classificare (vedi Fig. I-4) le varie tipologie di tremore, ponendo l’accento sul tremore fisiologico e sulle sue specifiche d’ampiezza e di accelerazione6.
Figura I - 4: Risultati degli studi (Berg, 2000) sull’ampiezza e la frequenza del tremore fisiologico.
Si accenna anche al tremore patologico, in modo da poter aprire la strada per eventuali sviluppi del prototipo per la compensazione di altre tipologie di tremore, quali il Parkinson, d’ampiezza e frequenza più elevata.
CAPITOLO III: Lo studio si concentra sul dimensionamento meccanico del bisturi meccatronico. Dopo una rilettura del progetto iniziale (Grassei, 2001), si passa alla progettazione ex novo dell’amplificazione idraulica dell’asse longitudinale dello strumento. L’analisi tocca la sua dinamica (vedi Fig. I-5) di funzionamento, la statica e la sua realizzazione materiale.
Figura I - 5: Forze agenti sull’utensile del bisturi meccatronico durante il suo funzionamento.
In seguito ad una ricerca sullo stato dell’arte degli attuatori e dei sensori7 ora in commercio, si testimonia il rischio d’obsolescenza tecnologica con la componentistica scelta in (Grassei, 2001) e contemporaneamente si sceglie i nuovi attuatori piezoelettrici multistrato e dei giroscopi più performanti.
Dall’incontro di queste due parti di progettazione si arriva alla formulazione di un’ipotesi sull’ampiezza del campo lavorativo del bisturi meccatronico e si verifica la sua adeguatezza alle specifiche introdotte (vedi Cap. 2).
CAPITOLO IV: In questa sezione si persegue la caratterizzazione del comportamento dei sensori scelti per essere montati sull’utensile chirurgico, in modo a 2 2 p t z m + ∂ ∂ ⋅
da rilevare i suoi spostamenti e le due rotazioni interessanti, scartando l’imbardata, movimento tipico di una fase di “stand-by” operatorio.
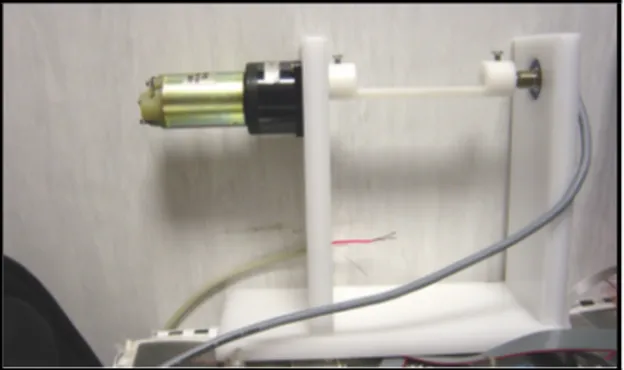
Tramite la costruzione di due semplici attrezzature di supporto (vedi Fig. I-6 e Fig. I-7), è stato possibile acquisire le caratteristiche di comportamento degli accelerometri, nel loro funzionamento da inclinometri e nei movimenti con energia potenziale costante, e dei giroscopi.
Figura I - 6: Banco prova per acquisizioni angolari.
Figura I - 7: Banco prova per acquisizioni translazionali.
Dall’analisi dei dati si è potuto individuare le loro performance mediante l’introduzione di stime sugli errori commessi quali l’accuratezza e la non-linearità rispetto alla retta di “best-fitting” calcolata da un numero rilevante di esperienze acquisite.
CAPITOLO V: In questa parte della tesi si è affrontato la problematica del controllo dello strumento (vedi Fig. I-8) e del passaggio dei dati di rilevazione del movimento della mano ad informazioni necessarie alla guida
delle tre serie di tre attuatori ciascuna, mediante gli adeguati calcoli cinematici. Sono stati, inoltre, analizzati i passi intermedi dell’iter suddetto: dal filtraggio dell’uscita dei sensori, alla sua integrazione per avere quelle informazioni in termini di spostamento, necessarie per realizzare la corretta traiettoria della punta dell’utensile.
Figura I - 8: Schema a blocchi del sistema di controllo (Riviere et al., 1998)
CAPITOLO VI: Al termine dello studio a cui si è dedicata questa tesi si traggono le conclusioni del lavoro svolto, paragonando i risultati ottenuti al prototipo (Riviere et al., 2003) ed al progetto (Grassei, 2001).
Si auspica un protocollo di prove tale che possa stimare l’efficienza del prototipo di strumento chirurgico ideato e realizzato e si introducono gli sviluppi futuri a cui questa prima versione potrebbe affacciarsi.