Facoltà di Ingegneria
Corso di Laurea in Ingegneria Edile e delle Costruzioni Civili
Tesi di Laurea Magistrale
UN NUOVO PONTE SUL FIUME SERCHIO
TRA LA S.S. N.12 “DELL’ABETONE E DEL BRENNERO”
E LA S.P. N.1 “FRANCIGENA”
Laureando: Relatori:
Andrea BIAGIONI Prof. Ing. Pietro CROCE
Dott. Ing. Daniele LUCCHESI
INDICE
INTRODUZIONE ... 1
PARTE PRIMA: STATO DELL’ARTE ... 4
CAPITOLO 1: I PONTI AD ARCO ... 5
1.1 Evoluzione storica dei ponti ad arco ... 5
1.2 Ponti ad arco spaziali ... 12
1.3 Ponti di nuova generazione ... 17
CAPITOLO 2: LA STABILITÀ DELL’EQUILIBRIO ... 21
2.1 Tipologie di instabilità ... 22
2.1.1 Instabilità con biforcazione stabile simmetrica ... 22
2.1.2 Instabilità con biforcazione instabile simmetrica ... 23
2.1.3 Instabilità con biforcazione asimmetrica ... 24
2.1.4 Instabilità senza biforcazione... 25
2.2 Effetti delle imperfezioni ... 26
2.3 Carico critico euleriano... 27
2.4 Impostazione del problema secondo l’Eurocodice 3 ... 29
2.4.1 Considerazioni generali ... 29
2.4.2 Ponti ad arco ... 30
PARTE SECONDA: IL CASO STUDIO ... 36
CAPITOLO 3: L’INTERVENTO ... 37
3.1 Contesto di riferimento ... 37
3.2 Concezione ... 40
CAPITOLO 4: NORMATIVA DI RIFERIMENTO ... 60
CAPITOLO 5: MATERIALI ... 61
5.1 Calcestruzzo ... 61
5.2 Acciaio per armature... 61
5.3 Acciaio per carpenteria metallica ... 62
5.3.1 Generalità... 62
5.3.2 Bulloni ... 62
CAPITOLO 6: CARATTERISTICHE DEL TERRENO ... 63
6.1 Terreno di fondazione ... 63
6.2 Terreno di riporto ... 68
CAPITOLO 7: MODELLO DI CALCOLO ... 69
CAPITOLO 8: AZIONI ... 75
8.1 Azioni permanenti ... 75
8.1.1 Peso proprio elementi strutturali ... 75
8.1.2 Carichi permanenti portati ... 75
8.2 Deformazioni impresse ... 75
8.2.1 Variazioni termiche ... 75
8.2.2 Ritiro e viscosità ... 76
8.3 Azioni variabili da traffico... 77
8.3.1 Corsie convenzionali ... 77
8.3.2 Schemi di carico ... 78
8.4 Azione longitudinale di frenamento o di accelerazione ... 80
8.5 Azione centrifuga... 80
8.6 Azioni di neve e vento ... 81
8.6.1 Carico neve ... 81
8.6.2 Carico vento ... 81
8.7.1 Parametri per la definizione degli spettri di risposta ... 85
8.7.2 Spettri di progetto ... 87
CAPITOLO 9: COMBINAZIONI DI CARICO ... 90
9.1 Combinazioni SLU ... 90
9.2 Combinazioni sismiche ... 92
CAPITOLO 10: VERIFICHE SOVRASTRUTTURA ... 94
10.1 Soletta d’impalcato ... 94
10.1.1 Zona comportamento a trave ... 95
10.1.2 Zona comportamento a piastra ... 104
10.2 Traversi ... 114
10.2.1 Calcole e verifica in Fase 0... 117
10.2.2 Calcolo e verifica in Fase 1 ... 118
10.2.3 Calcolo e verifica in Fase 2 ... 119
10.2.4 Calcolo e verifica in Fase 3 ... 121
10.2.5 Dimensionamento e verifica del sistema di connessione ... 122
10.2.6 Verifica di stabilità ... 123
10.3 Cassoni longitudinali... 125
10.3.1 Tensioni agli SLU ... 125
10.3.2 Verifica di resistenza ... 128
10.3.3 Verifica di stabilità ... 129
10.3.4 Verifica degli irrigiditori interni al cassone ... 131
10.3.5 Dimensionamento e verifica del sistema di connessione ... 134
10.4 Pendini ... 135
10.4.1 Sollecitazioni agli SLU ... 136
10.4.2 Verifica di resistenza ... 137
10.5 Archi... 138
10.5.1 Sollecitazioni agli SLU ... 139
10.5.3 Verifica di stabilità globale ... 141
10.5.4 Verifica di stabilità locale ... 148
10.5.5 Verifica profilo posto in prossimità di ogni pendino ... 149
10.6 Conci di estremità dell’impalcato ... 150
10.6.1 Sollecitazioni agli SLU ... 152
10.6.2 Verifica piatti in direzione longitudinale ... 153
10.6.3 Verifica piatti in direzione verticale... 154
10.6.4 Verifica piastra ortotropa mista ... 154
10.6.5 Sistema reticolare ... 163 10.7 Dispositivi di vincolo ... 164 10.8 Giunti di dilatazione ... 168 10.9 Collegamenti ... 169 10.9.1 Collegamenti traverso-traverso ... 169 10.9.2 Collegamento traverso-cassone ... 172
10.9.3 Collegamento irrigidimenti interni cassone ... 173
10.9.4 Collegamento cassone-pendino... 174
10.9.5 Collegamento arco pendino ... 175
10.9.6 Collegamento dei profili di irrigidimento interni ai cassoni177 CAPITOLO 11: VERIFICHE SOTTOSTRUTTURA ... 178
11.1 Collegamenti archi-impalcato ... 178
11.1.1 Verifiche dei tubolari di collegamento ... 179
11.1.2 Traversi tubolari ... 182 11.2 Portale di controvento ... 186 11.2.1 Colonne ... 187 11.2.2 Diagonali ... 190 11.2.3 Traverso ... 191 11.3 Giunti di base ... 195
11.3.1 Giunto di base archi ... 195
11.4 Spalle ... 206
11.4.1 Calcolo e verifica paraghiaia ... 209
11.4.2 Calcolo e verifica muro frontale ... 213
11.4.3 Calcolo e verifica bandiere ... 214
11.4.4 Calcolo e verifica muro di risvolto ... 217
11.4.5 Calcolo e verifica basamenti appoggi ... 218
11.4.6 Calcolo e verifica catena di collegamento tra i basamenti 219 11.4.7 Calcolo e verifica contrafforte ... 221
11.5 Fondazioni ... 223
11.5.1 Fondazioni spalle ... 223
11.5.2 Fondazione parte centrale ... 232
CAPITOLO 12: STIMA DEL COSTO DI COSTRUZIONE ... 238
CONCLUSIONI ... 240
INTRODUZIONE
Coniugare forma e funzione è uno dei temi fondamentali della progettazione architettonica e strutturale delle strutture moderne. Con la parola “forma” si identificano tutte le caratteristiche estetiche di un’opera; rientrano in questo ambito: bellezza, piacevolezza, rispetto delle proporzioni etc. Con “funzione” si intende invece l’utilità, la rispondenza alle esigenze ed alle prestazioni richieste dal committente.
Ovviamente, questi due aspetti non sono indipendenti l’uno dall’altro. Nella pratica usuale, la forma viene in genere concepita in relazione agli aspetti funzionali che la struttura deve soddisfare, ad elementi esterni, alla riproposizione modificata di soluzioni già adottate. La funzione risulta quasi un prerequisito della struttura, derivante dall’assunzione di schemi di funzionamento noti.
La tendenza moderna è, invece, quella di liberare il concetto di forma da quello di funzione, mettendo il progettista nella condizione di ideare l’“oggetto” sulla base del proprio estro creativo. Solo successivamente, all’interno della forma stabilita, egli organizzerà le funzioni per le quali l’opera è stata commissionata: dovrà, altresì, “vestire” la forma con una funzione. In questo caso le forme rispondono unicamente ad esperienze artistiche, libere da contenuti funzionali, ma cariche di significati simbolici. Il progettista può quindi concepire la forma in modo da dotare la struttura di caratteristiche di originalità, innovazione, armonia con il paesaggio circostante, cercando di sfruttare le potenzialità offerte dal caso specifico considerato. È chiaro che, nel caso in cui il binomio forma-funzione venga totalmente stravolto nella ricerca esasperata di forme originali quanto estrose, l’assegnazione funzionale può risultare molto difficoltosa e ciò può portare il progettista strutturale a proporre improbabili o ardite soluzioni statiche, notevolmente onerose e meno affidabili rispetto a soluzioni più standard.
Il passaggio da una concezione all’altra è stato possibile, in primo luogo, grazie allo sviluppo scientifico e tecnologico raggiunto negli ultimi anni, il quale ha permesso, da una parte, di spingersi verso livelli di analisi e di modellazione sempre più avanzati, che consentissero di rendere funzionali forme di per sé dotate di deboli valenze strutturali, e dall’altra, di rendere fabbricabili forme che, altrimenti, sarebbe stato impegnativo realizzare.
Tra le opere dell’Ingegneria Civile, i ponti sono sicuramente quelle per le quali si riscontra il maggior numero di esempi appartenenti all’una ed all’altra concezione del rapporto forma-funzione. Il ponte rappresenta, infatti, di per sé un simbolo della comunità cui appartiene e risulta quindi ovvio che ad esso vengano assegnate le caratteristiche estetiche ed architettoniche sopra citate.
Figura I-2 – Infinity Loop Bridge, Cina
Il presente lavoro di tesi si inserisce proprio all’interno di questo contesto. L’obiettivo è quello di applicare ad un esempio reale le considerazioni fin qui fatte sul rapporto tra concetto di forma e quello di funzione, visto in ottica moderna. Il caso studio è stato individuato nel bando pubblicato dalla Provincia di Lucca, relativo alla progettazione preliminare del nuovo ponte sul fiume Serchio tra la S.S. n.12 “dell’Abetone e del Brennero” e la S.P. n.1 “Francigena”. L’ubicazione dell’opera, a pochi chilometri a nord della città di Lucca, in un’area di particolare pregio ambientale, fa assumere ad essa un’importante valenza simbolica, rappresentando una sorta di porta d’ingresso alla città per i traffici provenienti da questa direzione: ciò giustifica l’attenzione volta inizialmente allo studio della forma ed alla concezione architettonica. La soluzione adottata prevede la presenza di quattro archi tubolari di grande luce, inclinati verso l’esterno rispetto al piano verticale che li contiene, i quali si slanciano dalla fondazione, posta in mezzeria al ponte, fino a raggiungere l’altezza massima di progetto, andandosi poi ad incastrare nell’impalcato in prossimità delle spalle.
Da quanto detto risulta chiaro come la soluzione progettuale scelta, in realtà, sia di tipo “borderline”, ossia si collochi in una posizione intermedia tra le due concezioni del rapporto forma-funzione definite in precedenza. La forma ad arco, seppur rivisitata, non può essere infatti definita come originale: non è perciò necessario “vestirla” con una funzione specifica, dato che il funzionamento di una struttura siffatta è ben noto; tuttavia, la particolare applicazione richiede che quest’ultimo venga valutato accuratamente attraverso analisi più avanzate, in particolare per quanto riguarda il problema della stabilità degli archi. A questo riguardo, è stato opportuno condurre un’analisi di buckling non lineare che tenesse in considerazione gli aspetti del secondo ordine e le imperfezioni iniziali della struttura, cercando di simulare quanto meglio possibile il comportamento reale. Oltre a questo, sono state affrontate le problematiche classiche interconnesse con la progettazione strutturale di un’opera di questo tipo.
PARTE PRIMA:
Capitolo 1
I PONTI AD ARCO
I ponti ad arco presentano un’evoluzione storica che fonda le sue radici nella tradizione più antica, risultando ancora oggi una tipologia di successo. Dopo millenni di ponti ad arco in muratura e quasi due secoli di inarrestabile sviluppo di ponti ad arco metallico o in calcestruzzo armato, sembrava tuttavia che questa tipologia fosse destinata ad un campo più ristretto a causa del dominio sempre più incontrastato della tipologia a travata e strallata. Il riaffermarsi dei ponti ad arco al giorno d’oggi è stato accompagnato da una forte accentuazione architettonica della loro concezione strutturale e dei loro dettagli costruttivi, derivante da un sempre più stretto rapporto, in fase progettuale, tra concetto di forma e quello di struttura.
Per una maggiore chiarezza sul funzionamento di questa tipologia di ponte, si ritiene opportuno, nel presente capitolo, ripercorrerne l’evoluzione storica, dall’epoca romana fino al giorno d’oggi, concentrando successivamente l’attenzione sui ponti ad arco di nuova generazione.
1.1
Evoluzione storica dei ponti ad arco
Il ponte ad arco è uno dei tipi di ponte più semplici dal punto di vista del funzionamento, ed è per questo motivo che se ne trovano esempi di realizzazioni fin dall’epoca romana. Il funzionamento ottimale di un ponte ad arco prevede che quest’ultimo sia soggetto prevalentemente a sforzi di compressione: l’assenza quasi totale di momenti flettenti nelle sezioni dell’arco si può avere solo per i carichi fissi, cioè permanenti, purché si scelga una opportuna forma dell’arco (linea d’asse coincidente con la curva delle pressioni o funicolare dei carichi); viceversa i carichi accidentali, che possono assumere posizioni diverse, generano sempre azioni flessionali. Questo schema statico genera un’azione di spinta alle imposte, la quale può essere assorbita direttamente da esse, ovvero, come vedremo in seguito, richiudersi nella struttura stessa (ponte ad arco a spinta eliminata).
Nel passato, dal tempo dei Romani che per primi impiegarono in modo esteso queste strutture, fino all’avvento della ferrovia all’inizio del secolo scorso, i carichi permanenti erano nettamente prevalenti rispetto a quelli accidentali; ciò ha permesso la costruzione di ponti ad arco anche di luce notevole con l’impiego di materiali non resistenti a trazione come la muratura di pietra o di mattoni. I ponti romani erano principalmente a sagoma circolare, e non erano rari esempi di ponti composti da più arcate o addirittura da più ordini di arcate disposti su livelli
multipli; un esempio di ponte romano ancora in uso è il Ponte dei Quattro Capi a Roma, risalente al 62 a.C., mostrato nella figura 1-1.
Figura 1-1 - Ponte dei Quattro Capi, Roma, 62 a.C. (luce max 24,5 m)
Nel Medioevo l’evoluzione delle metodologie costruttive permise di accrescere le potenzialità della tecnica del ponte ad arco: i ponti divennero più sottili e leggeri, guadagnando inoltre in termini di lunghezza utile della campata. Un esempio di ponte medievale, risalente al XIV Secolo, è il Ponte della Maddalena, sito nel Comune di Borgo a Mozzano (provincia di Lucca), mostrato nella figura 1-2.
I ponti ad arco di questo tipo si presentano come nella figura 1-3, ossia con un collegamento continuo tra arco propriamente detto e piano viabile. Ne risulta una struttura molto pesante in cui è difficile stabilire quale parte dei carichi venga portata dal volto e quale dai rigidi muri di timpano. In figura è indicata anche la terminologia corrente con cui si indicano le varie parti dell’arco, rimasta tale anche nel caso di ponti moderni.
I ponti moderni si presentano morfologicamente differenti, dovendo sopportare il transito di carichi accidentali impegnativi quali sono quelli militari o quelli ferroviari; infatti questi carichi accidentali, essendo importanti rispetto ai carichi fissi, generano inevitabilmente sollecitazioni di flessione nella struttura e quindi sforzi di trazione nel materiale di cui essa è costituita. I moderni ponti ad arco di grande luce sono stati, pertanto, costruiti con materiali idonei a sopportare
sia gli sforzi di compressione sia quelli di trazione (ghisa, ferro, acciaio, calcestruzzo armato).
Figura 1-2 - Ponte della Maddalena, Borgo a Mozzano (LU), XIV Sec.
Dal punto di vista tipologico i ponti moderni possono essere classificati in base:
• al materiale
• allo schema statico
• al rapporto arco – impalcato
Come già anticipato, i materiali più utilizzati per i ponti moderni sono acciaio (ponti metallici) e calcestruzzo armato, per la necessità di resistere a sforzi di trazione.
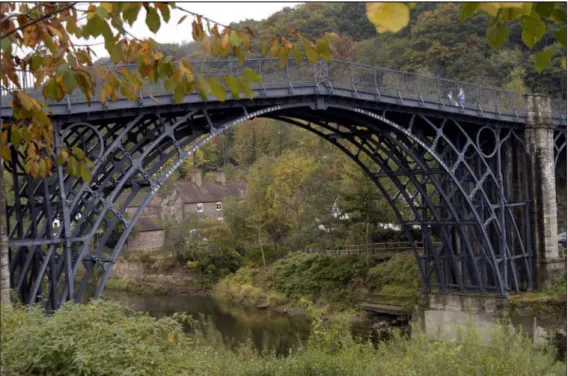
I primi esempi di ponti metallici sono relativi al XVIII Secolo, in seguito alla diffusione dei processi di produzione industriale; il primo ponte ad arco metallico, mostrato nella figura 1-4, è l’Iron Bridge di Coalbrookdale (Inghilterra), interamente realizzato in ghisa e con un arco di luce pari a 30 m; è considerato uno dei simboli storici della rivoluzione industriale.
Figura 1-4 - Iron Bridge, Coalbrookdale (Inghilterra), 1779 (luce max 30 m)
Dalla seconda metà dell’800, l’avvento dell’acciaio e i progressi compiuti dalla Scienza delle Costruzioni aprirono la strada verso la realizzazione di ponti ad arco caratterizzati da schemi statici più articolati, mostrati nella figura 1-5, necessari per spingersi verso luci libere sempre maggiori.
Lo schema di arco a 3 cerniere (caso “c”) presenta i vantaggi tipici degli schemi isostatici, primo fra tutti l’insensibilità ai cedimenti differenziali dei
vincoli ed alle variazioni termiche. Assume particolare importanza il posizionamento della curva delle pressioni nei 3 casi:
• arco incastrato: la curva delle pressioni non ha alcun punto di passaggio obbligato
• arco a 2 cerniere: la curva delle pressioni è obbligata a passare per le cerniere d’imposta
• arco a 3 cerniere: la curva delle pressioni è obbligata a passare per le cerniere d’imposta e per quella in chiave
Figura 1-5 – Schemi statici arco: a)incastrato; b)2 cerniere; c)3 cerniere
Si trovano esempi di realizzazioni di ponti ad arco appartenenti a ciascuno degli schemi statici sopra riportati, sia nel caso metallico (con arco costituito da nervature a parete piena o in sistema reticolare) sia nel caso di calcestruzzo armato. Si riporta un esempio di ciascun tipo: in figura 1-6 è mostrato l’Alexander Hamilton Bridge che attraversa il fiume Harlem di New York (esempio di arco metallico incastrato a parete piena); in figura 1-7 si riporta il Viadotto di Garabit di Gustave Eiffel, che varca la vallata del fiume Truyère, in Francia (esempio di arco metallico reticolare a 2 cerniere); infine in figura 1-8 troviamo il Viadotto Salginatobel, realizzato da Maillart e situato in prossimità di una profonda gola in Svizzera (esempio di arco in calcestruzzo armato a 3 cerniere).
In base al rapporto tra arco ed impalcato, quest’ultimo può essere appoggiato o appeso alla struttura principale, così come si osserva nella figura 1-9, ed inoltre può essere collaborante o meno, a seconda che esso assorba parte delle azioni (sistemi collaboranti arco – trave) o gravi unicamente sulla struttura (sistemi ad arco puro).
La soluzione “a” della figura 1-9 è generalmente impiegata per i ponti in acciaio, mentre la soluzione “b” è più in uso per quelli in calcestruzzo armato. Una variante della soluzione “a” è il cosiddetto arco a spinta eliminata, in cui l’implacato funge da catena dell’arco, ossia ha la funzione di assorbire la spinta generata da quest’ultimo. Naturalmente, è anche possibile avere una soluzione intermedia tra quelle rappresentate nella figura 1-9, con il piano viabile situato talvolta sopra e talvolta sotto l’arco: si parla, in tal caso, di ponte a via intermedia.
Figura 1-6 – Alexander Hamilton Bridge, New York, 1963 (luce max 169 m)
Figura 1-8 – Viadotto Salginatobel, Schiers (Svizzera), 1930 (luce max 90 m)
Figura 1-9 –
La sfida ulteriore, a questo punto, era quella, per i ponti ad arco (ossia facenti riferimento al caso “a” della figura 1
classici di trave tipo “ spingendosi verso
architettonica, come descritto
Figura 1-10 – Schemi classici di ponti ad arco “tirantati”: A) schema “Langer”; B) schema Viadotto Salginatobel, Schiers (Svizzera), 1930 (luce max 90 m)
Schemi di ponte ad arco: a) a via inferiore; b) a via super La sfida ulteriore, a questo punto, era quella, per i ponti ad arco
(ossia facenti riferimento al caso “a” della figura 1-9), di abbandonare gli schemi classici di trave tipo “Langer” o tipo “Nielsen”, mostrati nella figura 1
osi verso soluzioni caratterizzate da una maggiore descritto nei paragrafi successivi.
Schemi classici di ponti ad arco “tirantati”: A) schema “Langer”; B) schema “Nielsen”
Viadotto Salginatobel, Schiers (Svizzera), 1930 (luce max 90 m)
ponte ad arco: a) a via inferiore; b) a via superiore
La sfida ulteriore, a questo punto, era quella, per i ponti ad arco “tirantati” 9), di abbandonare gli schemi ”, mostrati nella figura 1-10, maggiore espressione
1.2
Ponti ad arco spaziali
I ponti in zona urbana hanno assunto ultimamente una nuova funzione: oltre ad offrire una connessione fisica tra due punti, essi vogliono affermarsi come dei simboli in termini di originalità, innovazione, nonché integrazione con il paesaggio circostante.
I ponti ad arco spaziali sono apparsi come risposta a questa richiesta; essi sono definiti come ponti in cui i carichi verticali producono sollecitazioni flessionali e taglianti che non sono contenute nel piano dell’arco, a causa della loro configurazione geometrica e strutturale. Inoltre, nel caso generale, anche l’arco stesso può non essere contenuto in un piano.
Sono nate così nuove geometrie per i ponti, con archi disposti nello spazio secondo le più varie orientazioni; i cavi di sospensione non rappresentano più meri elementi strutturali, ma assumono anch’essi un carattere architettonico, originando superfici rigate che dividono lo spazio, come mostrato nella figura 1-11.
Tutto questo è stato possibile grazie al recente sviluppo tecnologico, il quale ha permesso sia di implementare analisi e simulazioni molto più complesse e vicine al comportamento reale, sia di rendere fabbricabili delle forme che, altrimenti, sarebbe stato impossibile realizzare. Questi sviluppi hanno allargato molto le possibilità di progettazione; naturalmente, caratteristiche architettoniche e strutturali devono essere in stretto rapporto, in modo da ottimizzare le possibilità offerte in termini di materiali e metodi di calcolo, progettazione e realizzazione.
Sono di seguito riportati alcuni esempi di ponti ad arco spaziali: in figura 1-12 è riportato l’Alameda Bridge di Valencia (Spagna); in figura 1-13 troviamo invece il Dreilander Bridge, situato a Basel (Svizzera).
Figura 1-12 – Alameda Bridge, Valencia (Spagna), 1995
Vi sono casi in cui il ponte ad arco può non essere definito puramente spaziale, ossia quando esso si presenta simmetrico in direzione longitudinale: in questa situazione, infatti, il comportamento spaziale è attivato solo dall’eccentricità dei carichi verticali sull’impalcato o dal peso proprio degli archi inclinati. Un esempio di quanto detto è mostrato nella figura 1-14, con il Peraleda Bridge, situato a Toledo (Spagna).
Figura 1-13 – Dreilander Bridge, Basel (Svizzera), 2007 (luce max 229 m)
Figura 1-14 – Peraleda Bridge, Toledo (Spagna), 2005
La classificazione dei ponti ad arco spaziali risulta molto complicata in quanto la loro definizione coinvolge molte variabili e, di conseguenza, possono essere usati diversi criteri. Le variabili coinvolte sono le seguenti:
• Tipologia dell’arco: nervatura o guscio
• Forma geometrica
• Condizioni di vincolo dell’arco e dell’impalcato sulle spalle
• Sistema di sospensione dell’impalcato
Per prima cosa, i ponti ad arco spaziali possono essere divisi in due grandi gruppi in base alla tipologia dell’arco: finora abbiamo considerato ponti in cui l’arco è costituito da semplici nervature, ma esistono anche casi di arco a guscio, come mostrato nella figura 1-15, che però ricoprono una piccolissima parte e quindi non considereremo.
I ponti ad arco spaziali con archi costituiti da nervature semplici possono essere classificati a seconda del caso in cui l’arco si presenta simmetrico o asimmetrico in direzione longitudinale; successivamente, per quest’ultimo caso, la classificazione avviene in base alla posizione dell’impalcato rispetto agli archi (ponte a via superiore, inferiore, o intermedia), la curvatura dell’impalcato e il numero degli archi stessi. Infine, un’ulteriore suddivisione può essere fatta in relazione alla forma e alla geometria degli archi.
Figura 1-15 – Matadero Bridge, Madrid (Spagna)
Si riportano, per concludere, alcuni esempi di ponti ad arco spaziali realizzati nel nostro Paese negli ultimi decenni: in figura 1-16 si riporta uno dei ponti realizzati da Santiago Calatrava a Reggio Emilia; in figura 1-17 troviamo invece il Ponte della Musica di Roma. Il primo di questi si spinge ancora oltre rispetto a quanto descritto nel presente paragrafo, verso una concezione della forma più originale e innovativa, che verrà meglio definita nel paragrafo successivo.
Figura 1-16 – Ponte di Calatrava, Reggio Emilia, 2007
1.3
Ponti di nuova generazione
Come già descritto nell’introduzione di questo lavoro di tesi, la tendenza moderna è quella di liberare il concetto di “forma” da quello di “funzione”, lasciando il progettista nella condizione di ideare l’opera in modo del tutto libero da vincoli funzionali; solo successivamente, egli dovrà “vestire” la forma scelta delle funzioni per le quali essa è stata commissionata. In questo modo le forme concepite saranno dotate di caratteristiche di innovazione, originalità, armonia con il paesaggio circostante, molto più spinte rispetto alla pratica usuale, in cui la forma viene concepita in relazione agli aspetti funzionali che la struttura deve soddisfare.
Tra le opere dell’Ingegneria Civile, i ponti sono sicuramente quelli per le quali si riscontra il maggior numero di esempi relativi a questa nuova concezione. Il ponte rappresenta, infatti, di per sé un simbolo della comunità cui appartiene e risulta quindi ovvio curarne particolarmente le caratteristiche estetiche ed architettoniche. Questo discorso è valido in particolar modo per le passerelle pedonali per le quali, a causa dei carichi accidentali molto limitati, la forma può essere talvolta molto bizzarra. Risulta chiaro, comunque, che nel caso in cui il rapporto forma-funzione venga totalmente stravolto nella ricerca esasperata di forme originali quanto estrose, le soluzioni statiche che ne derivano potranno essere molto onerose in termini economici nonché meno affidabili rispetto a soluzioni più standard. Alcuni esempi di sbilanciamento del binomio forma-funzione sono mostrati nelle figure 1-18, relativa al Webb bridge, una passerella pedonale situata a Docklands (Australia), e 1-19, dove troviamo invece il Valentine Bridge, situato a Bristol (Inghilterra).
Figura 1-19 – Valentine Bridge, Bristol (Inghilterra)
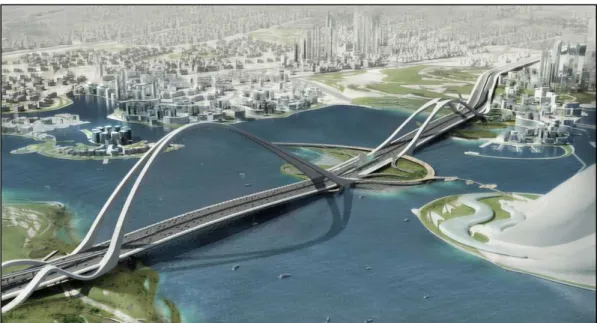
In questa ottica i ponti ad arco appaiono molto rivisitati: il loro utilizzo è giustificato, più che dal funzionamento strutturale noto, da una forma caratterizzata da un elevato pregio estetico ed architettonico. L’arco, infatti, presenta senza ombra di dubbio una forma bella e piacevole alla vista, nonché idonea ad inserirsi nella maggior parte dei paesaggi urbani. Molte, in questo senso, sono le rivisitazioni in chiave moderna dello schema classico ad arco, come possiamo osservare dalle figure poste di seguito: nella figura 1-20 troviamo il Juscelino Kubitschek Bridge, formato da 3 archi che attraversano l’impalcato da un lato all’altro, situato a Brasilia (Brasile); in figura 1-21 è invece mostrato lo Sheikh Zayed Bridge, con la sua forma avveniristica che richiama quella degli archi, situato ad Abu Dhabi (Emirati Arabi Uniti). Nelle figure successive, ossia 1-22 e 1-23, si trovano esempi di ponti non ancora realizzati, in fase di progettazione, che comunque rispecchiano le caratteristiche descritte in questo paragrafo: nella figura 1-22 troviamo sia il render che la vista in pianta dell’Infinity Loop Bridge di Zhuhai (Cina); in figura 1-23 è riportato infine il Dubai Bridge di Dubai (Emirati Arabi Uniti).
Figura 1-20 – Juscelino Kubitschek Bridge, Brasilia (Brasile), 2002
Figura 1-22 – Infinity Loop Bridge, Zhuhai (Cina)
Capitolo 2
LA STABILITÀ DELL’EQUILIBRIO
La crisi di un sistema può avvenire per molteplici cause che, in campo strutturale, si possono così riassumere: collasso plastico, rottura fragile e perdita di equilibrio. La prima forma è legata all’esaurimento delle riserve di resistenza del materiale, mentre la seconda sopraggiunge quando le sollecitazioni eccedono il limite di resistenza in un elemento fragile o si ripetono un numero di volte tale da indurre fenomeni di fatica.
Esistono situazioni in cui la crisi della struttura si manifesta nonostante il regime di sforzo si mantenga ovunque al di sotto delle capacità resistenti del materiale; il fenomeno non è più dovuto alle sollecitazioni, bensì al raggiungimento di una nuova condizione di equilibrio rispetto alla configurazione indeformata: è questo il caso della crisi per instabilità.
Il problema dell’instabilità dell’equilibrio è sempre stato molto sentito perché di difficile valutazione rispetto al semplice collasso del materiale per raggiungimento di uno stato di rottura. Tale fenomeno, infatti, avviene più o meno istantaneamente e senza preavviso, anche per elementi strutturali duttili, al raggiungimento di un valore critico dello sforzo sollecitante.
Per lo studio dei problemi di instabilità è necessario abbandonare la cosiddetta teoria del I ordine, la quale prevede la scrittura delle equazioni di equilibrio nella configurazione indeformata, a favore di una teoria del II ordine, che fa invece riferimento alla configurazione deformata (introducendo, tuttavia, diverse ipotesi semplificative). Quest’ultima è pero adatta solo per strutture limitatamente deformabili; se volessimo spingersi oltre, dovremmo considerare l’esistenza di comportamenti aventi carattere non lineare, sia a causa della geometria (non linearità geometrica), sia del materiale (non linearità meccanica).
Non essendo più valida l’ipotesi della Scienza delle Costruzioni che prevede spostamenti e deformazioni trascurabili, non è possibile applicare il Principio di Sovrapposizione degli Effetti; pertanto, per la risoluzione di problemi di questo tipo, è necessario considerare metodi alternativi quali il Metodo Statico ed il Metodo Energetico. Essi consentono di determinare l’equazione differenziale che, unita alle condizioni al contorno, fornisce la soluzione del problema. Il secondo approccio consente inoltre di avere informazioni per quanto riguarda il comportamento post – critico della struttura e quindi sulla qualità della posizione di equilibrio: l’equilibrio può essere stabile (in corrispondenza di un minimo locale dell’energia potenziale), instabile (massimo locale dell’energia potenziale) o indifferente (energia potenziale localmente costante). Nel primo caso una
piccola variazione delle condizioni causa un richiamo del sistema verso la posizione di equilibrio; nel sec
variazioni portano tutte a nuove configurazioni di equilibrio.
2.1
Tipologie di instabilità
Studiando semplici sistemi ad un solo grado di libertà, è possibile tipologie di instabilità dell’e
elementi strutturali reali ben più complessi.
2.1.1
Instabilità con biforcazione stabile simmetrica
Consideriamo inizialmente un’asta soggetta ad un carico di punta, incastrata alla base con un vincolo non infi
rotazionale di costante elastica k (figura 2
Figura
Imprimendo un piccolo spostamento all’asta, si manifesta una coppia instabilizzante dovuta all’ec
coppia interna stabilizzante generata dalla molla rotazionale. Imponendo l’uguaglianza tra i due contributi, si trova il cosiddetto punto di biforcazione ed il noto diagramma mostrato in figura 2
situazione ideale di asta perfetta senza eccentricità iniziali del carico, mentre in azzurro spezzata è mostrata la situazione reale, come verrà meglio descritto in seguito).
Questo tipo di instabilità è molto gra
superiori a quello critico, l’asta trova il suo equilibrio nella configurazione non banale con movimenti molto grandi, in pratica inaccettabili: il carico critico si configura quindi come il carico limite che può e
piccola variazione delle condizioni causa un richiamo del sistema verso la posizione di equilibrio; nel secondo causa un allontanamento e nel terzo le piccole variazioni portano tutte a nuove configurazioni di equilibrio.
Tipologie di instabilità
Studiando semplici sistemi ad un solo grado di libertà, è possibile
tipologie di instabilità dell’equilibrio, che possono essere considerate anche per elementi strutturali reali ben più complessi.
Instabilità con biforcazione stabile simmetrica
Consideriamo inizialmente un’asta soggetta ad un carico di punta, incastrata alla base con un vincolo non infinitamente rigido, approssimabile ad una molla rotazionale di costante elastica k (figura 2-1).
Figura 2-1 – Asta vincolata alla base con incastro elastico
Imprimendo un piccolo spostamento all’asta, si manifesta una coppia instabilizzante dovuta all’eccentricità di P, la quale deve essere equilibrata dalla coppia interna stabilizzante generata dalla molla rotazionale. Imponendo l’uguaglianza tra i due contributi, si trova il cosiddetto punto di biforcazione ed il iagramma mostrato in figura 2-2 (in blu a tratto continuo è rappresentata la situazione ideale di asta perfetta senza eccentricità iniziali del carico, mentre in azzurro spezzata è mostrata la situazione reale, come verrà meglio descritto in Questo tipo di instabilità è molto gravosa in quanto, anche per carichi di poco superiori a quello critico, l’asta trova il suo equilibrio nella configurazione non banale con movimenti molto grandi, in pratica inaccettabili: il carico critico si configura quindi come il carico limite che può essere applicato alla struttura. piccola variazione delle condizioni causa un richiamo del sistema verso la
ondo causa un allontanamento e nel terzo le piccole
Studiando semplici sistemi ad un solo grado di libertà, è possibile ottenere diverse quilibrio, che possono essere considerate anche per
Consideriamo inizialmente un’asta soggetta ad un carico di punta, incastrata alla nitamente rigido, approssimabile ad una molla
Imprimendo un piccolo spostamento all’asta, si manifesta una coppia centricità di P, la quale deve essere equilibrata dalla coppia interna stabilizzante generata dalla molla rotazionale. Imponendo l’uguaglianza tra i due contributi, si trova il cosiddetto punto di biforcazione ed il n blu a tratto continuo è rappresentata la situazione ideale di asta perfetta senza eccentricità iniziali del carico, mentre in azzurro spezzata è mostrata la situazione reale, come verrà meglio descritto in vosa in quanto, anche per carichi di poco superiori a quello critico, l’asta trova il suo equilibrio nella configurazione non banale con movimenti molto grandi, in pratica inaccettabili: il carico critico si ssere applicato alla struttura. Si
può altresì dire che il carico critico è seguito da un recupero di rigidezza del sistema.
Figura 2-2 –
2.1.2
Instabilità con biforcazione instabile simmetrica
Si consideri ora un’asta soggetta ad un carico di punta, incernierata alla base e vincolata superiormente da una molla
orizzontalmente, come in figura 2
Figura 2-3 – Asta incernierata alla base e vincolata
Analogamente al caso precedente, imprimendo un piccolo spostamento all’asta si genera una coppia instabilizzante, alla quale si oppone la coppia interna generata dall’accorciamento o dall’allungamento della molla posta in sommità, in può altresì dire che il carico critico è seguito da un recupero di rigidezza del
Relazione carico – rotazione biforcazione simmetrica stabile
Instabilità con biforcazione instabile simmetrica
onsideri ora un’asta soggetta ad un carico di punta, incernierata alla base e vincolata superiormente da una molla, con costante elastica k, disposta
come in figura 2-3.
Asta incernierata alla base e vincolata elasticamente in sommità
Analogamente al caso precedente, imprimendo un piccolo spostamento all’asta si genera una coppia instabilizzante, alla quale si oppone la coppia interna generata dall’accorciamento o dall’allungamento della molla posta in sommità, in può altresì dire che il carico critico è seguito da un recupero di rigidezza del
biforcazione simmetrica stabile
onsideri ora un’asta soggetta ad un carico di punta, incernierata alla base e con costante elastica k, disposta
in sommità
Analogamente al caso precedente, imprimendo un piccolo spostamento all’asta si genera una coppia instabilizzante, alla quale si oppone la coppia interna generata dall’accorciamento o dall’allungamento della molla posta in sommità, in
seguito alla rotazione dell’asta. Imponendo l’uguaglianza si ottiene il diagramma mostrato in figura 2-4 dall’andamento sempre simmetrico, ma instabile.
Figura 2-4 – Relazione carico – rotazione biforcazione simmetrica instabile
Nel caso precedente si è visto come il carico critico non corrisponda ad un carico di rottura, in quanto la struttura può seguire il ramo post – critico purché il carico sia accresciuto (ramo post – critico crescente). In questo caso, invece, essendo il ramo post – critico decrescente, il carico critico si configura come il carico limite ultimo della struttura: una volta raggiunto, essa non è più in grado di trovare ulteriori posizioni di equilibrio all’aumentare del carico. Possiamo dire che il carico critico conduce ad un progressivo deterioramento della rigidezza.
2.1.3
Instabilità con biforcazione asimmetrica
Consideriamo ora un’asta soggetta ad un carico di punta, incernierata alla base e vincolata superiormente da una molla, con costante elastica k, disposta diagonalmente come in figura 2-5.
Ancora una volta, uno piccolo spostamento dell’asta dalla configurazione banale genera una coppia instabilizzante alla quale si oppone la coppia interna stabilizzante dovuta all’allungamento o all’accorciamento della molla. Imponendo l’equilibrio tra le due quantità si ottiene il diagramma mostrato in figura 2-6.
La biforcazione dell’equilibrio non è simmetrica, poiché la rigidezza declina per rotazioni positive crescenti e invece aumenta per rotazioni negative.
Figura 2-5 – Asta incernierata alla base
Figura 2-6
2.1.4
Instabilità senza biforcazione
Finora sono stati considerati semplici sistemi ad un grado di libertà in cui la forma instabile è quella euleriana: qu
una configurazione di equilibrio banale (o fondamentale) calcolabile rimanendo nell’ipotesi di piccoli spostamenti ed utilizzando, quindi, la teoria del I ordine. La struttura risponde linearmente al cari
(carico critico euleriano), in corrispondenza del quale la struttura modifica la propria rigidezza ed individua un nuovo possibile percorso di equilibrio che si sovrappone a quello fondamentale, dando luogo co
dell’equilibrio.
Nella maggior parte dei casi, però, i problemi di instabilità per le aste reali si allontanano da quelli euleriani appena visti. A tal proposito, consideriamo la
Asta incernierata alla base e vincolata con una molla diagonale
6 – Relazione carico – rotazione biforcazione asimmetrica
Instabilità senza biforcazione
Finora sono stati considerati semplici sistemi ad un grado di libertà in cui la forma euleriana: questi problemi sono caratterizzati dalla presenza di una configurazione di equilibrio banale (o fondamentale) calcolabile rimanendo nell’ipotesi di piccoli spostamenti ed utilizzando, quindi, la teoria del I ordine. La struttura risponde linearmente al carico fino al raggiungimento di un valore critico (carico critico euleriano), in corrispondenza del quale la struttura modifica la ed individua un nuovo possibile percorso di equilibrio che si sovrappone a quello fondamentale, dando luogo così alla cosiddetta biforcazione Nella maggior parte dei casi, però, i problemi di instabilità per le aste reali si allontanano da quelli euleriani appena visti. A tal proposito, consideriamo la
e vincolata con una molla diagonale
rotazione biforcazione asimmetrica
Finora sono stati considerati semplici sistemi ad un grado di libertà in cui la forma esti problemi sono caratterizzati dalla presenza di una configurazione di equilibrio banale (o fondamentale) calcolabile rimanendo nell’ipotesi di piccoli spostamenti ed utilizzando, quindi, la teoria del I ordine. La co fino al raggiungimento di un valore critico (carico critico euleriano), in corrispondenza del quale la struttura modifica la ed individua un nuovo possibile percorso di equilibrio che si sì alla cosiddetta biforcazione Nella maggior parte dei casi, però, i problemi di instabilità per le aste reali si allontanano da quelli euleriani appena visti. A tal proposito, consideriamo la
capriata molto ribassata, mostrata nella figura 2-7, comprendente due aste rettilinee vincolate da cerniere perfette.
Figura 2-7 – Capriata ribassata soggetta ad un carico concentrato P
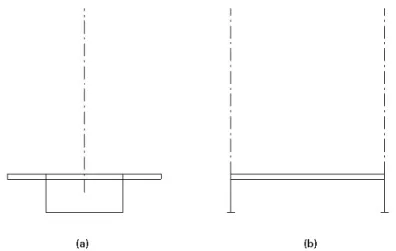
Se il carico esterno si mantiene al di sotto del carico critico non si hanno particolari variazioni, se non nell’ambito dei piccoli spostamenti; al raggiungimento del carico critico per le due aste compresse, si ha un brusco passaggio (il cosiddetto “snap”) dalla configurazione “a” di equilibrio instabile alla configurazione “b” di equilibrio stabile. La stabilità di quest’ultima posizione è dovuta al fatto che le aste non risultano più compresse, bensì tese e quindi non più soggette al problema dell’instabilità dell’equilibrio (figura 2-8).
Figura 2-8 – Relazione carico – abbassamento per instabilità tipo “snap”
2.2
Effetti delle imperfezioni
La presenza delle imperfezioni, che determinano delle eccentricità iniziali, non volute ma inevitabili, impedisce che nei casi reali si realizzi il fenomeno dell’instabilità per biforcazione, caratteristico dei sistemi perfetti; pertanto, l’instabilità sarà raggiunta per carichi inferiori. Abbiamo visto nei paragrafi precedenti come questo avvenga per ogni tipo di instabilità: le curve tratteggiate
in azzurro delle figure 2-2, 2-4, 2-6 mostrano proprio questo fenomeno, e lo scostamento dalle corrispondenti curve continue in blu è dipendente proprio dall’entità dell’imperfezione stessa.
Le imperfezioni si possono distinguere in due grandi categorie:
- Imperfezioni geometriche: linea d’asse pre–deformata prima dell’applicazione dei carichi, forma irregolare della sezione, etc.
- Imperfezioni del materiale: tensioni residue, disomogeneità del materiale, etc.
Indipendentemente dalla tipologia di imperfezione, il risultato pratico è lo stesso: la struttura si allontana via via dalla configurazione banale al crescere del carico, senza passare dal punto di biforcazione.
2.3
Carico critico euleriano
Negli studi sulla linea elastica condotti da Eulero su un’asta snella a sezione costante, inestensibile, deformabile solo a flessione e non a taglio, egli arrivò nel 1774 alla formulazione della nota formula per la determinazione del carico critico elastico, ossia:
=
Si può affermate che il carico critico euleriano è proporzionale alla rigidezza flessionale EJ nella direzione di sbandamento ed inversamente proporzionale al quadrato della lunghezza dell’asta, considerata incernierata alle estremità.
Bernoulli generalizzò il risultato ottenuto, introducendo al denominatore la lunghezza libera di inflessione l0, ovvero la distanza tra due successivi punti di flesso della deformata critica, giungendo perciò alla seguente formula:
=
Al variare delle condizioni di vincolo alle estremità dell’asta, si dovrà fare riferimento alle lunghezze libere di inflessione riportate nella figura 2-9.
Le formule citate mostrano limiti di validità nel caso di travi non sufficientemente snelle, per le quali non è scontato che il meccanismo di sbandamento sia in grado di mobilitarsi. Risulta allora conveniente riscrivere la
formula precedente nel seguente modo, ossia in termini della tensione critica euleriana:
=
dove
= , in cui = rappresenta il raggio d’inerzia della sezione nella direzione dell’asse di flessione
Figura 2-9 – Lunghezza di libera inflessione per diverse condizioni di vincolo
Diagrammando la tensione critica euleriana in funzione della snellezza, si ottiene quindi la cosiddetta iperbole euleriana, mostrata in figura 2-10.
Figura 2-10 – Iperbole euleriana
Tale iperbole prevede carichi critici tendenti a zero per snellezze tendenti all’infinito e, al contrario, carichi critici tendenti all’infinito per snellezze tendenti a zero. Quest’ultima tendenza è inverosimile poiché è ovvio che, al di sotto di un
certo valore di snellezza, sopraggiunge la crisi per snervamento: questo valore limite di snellezza in corrispondenza del passaggio tra le due tipologie di crisi è espressa dalla seguente relazione:
=
Nelle strutture reali le due tipologie di crisi interagiscono tra loro e, di conseguenza, il passaggio da una all’altra non è così repentino in corrispondenza di λlim, bensì avviene in maniera graduale come mostrato dalla curva tratteggiata della figura 2-10.
2.4
Impostazione del problema secondo l’Eurocodice 3
2.4.1
Considerazioni generali
Secondo quanto contenuto all’interno dell’ ”Eurocodice 3: Progettazione delle strutture in acciaio – Parte 1-1: Regole generali e regole per gli edifici”, par. 5.2, gli effetti della geometria deformata (effetti del secondo ordine) devono essere tenuti in considerazione se questo comporta un incremento significativo degli effetti delle azioni o modifica notevolmente il comportamento strutturale. Se, invece, la loro considerazione non produce cambiamenti rilevanti nel funzionamento strutturale, essi possono essere trascurati, conducendo una classica analisi del primo ordine (geometria indeformata della struttura).
Nel caso in cui si ritenga opportuno considerare l’influenza della deformazione della struttura, in linea con quanto appena detto, la verifica della stabilità degli elementi deve essere effettuata considerando le imperfezioni e gli effetti del secondo ordine. Questi possono essere messi in conto seguendo uno dei seguenti metodi:
- entrambi considerati totalmente nell’analisi globale
- considerati parzialmente nell’analisi globale e parzialmente attraverso le verifiche di stabilità delle membrature, contenute nel par. 6.3 (resistenza all’instabilità delle membrature)
- per casi semplici, attraverso le verifiche di stabilità di membrature equivalenti, usando lunghezze libere di inflessione in linea con la forma di instabilità (forma di buckling) globale della struttura
Gli effetti del secondo ordine possono essere considerati conducendo un’opportuna analisi (del tipo step-by-step o altri procedimenti iterativi). Per membrature in cui la prima forma di buckling risulta predominante, è possibile eseguire un’analisi elastica del primo ordine andando però ad amplificare gli effetti secondo opportuni fattori.
In base al modo con cui vengono considerate le imperfezioni e gli effetti del secondo ordine, la verifica di stabilità delle singole membrature può essere condotta come descritto di seguito:
- se gli effetti del secondo ordine e le imperfezioni sono totalmente inclusi nell’analisi globale della struttura, non è richiesta nessuna ulteriore verifica di stabilità per le membrature
- se, invece, essi non sono totalmente inclusi, è richiesta la verifica di stabilità per le membrature, relativamente agli effetti non considerati nell’analisi globale
Per quanto riguarda le imperfezioni da considerare, le quali possono riferirsi sia alle caratteristiche del materiale sia alle caratteristiche geometriche, come difetti di verticalità, di rettilineità, o altre minori eccentricità, si precisa che queste sono relative alla struttura non caricata. Si farà riferimento ad imperfezioni geometriche equivalenti, con valori che rispecchino gli effetti totali delle varie tipologie di imperfezioni; esse sono suddivise in:
- imperfezioni globali della struttura - imperfezioni locali delle membrature
La forma da assumere per entrambe le tipologie di imperfezioni, globali e locali, può essere dedotta da un’analisi di buckling elastico, considerando sia il caso di instabilità nel piano che fuori piano, e scegliendo poi la situazione più svantaggiosa.
2.4.2
Ponti ad arco
L’ “Eurocodice 3: Progettazione delle strutture in acciaio – Parte 2: Ponti in acciaio” rimanda all’EC3-1.1 per quanto riguarda i problemi relativi all’instabilità, ossia a quanto abbiamo riportato nel paragrafo precedente.
L’appendice D “Lunghezza libera d’inflessione per le membrature da ponte e assunzioni per le imperfezioni geometriche”, ed in particolare il par. D.3 “Ponti ad arco”, fornisce invece indicazioni sul valore da adottare per la lunghezza di libera inflessione e per le imperfezioni, nel caso specifico di ponte ad arco.
Per la valutazione della forza critica per instabilità nel piano dell’arco, viene fornita la seguente formula:
=
dove
Ncr forza critica applicata alle imposte s metà della lunghezza dell’arco
EJ rigidezza flessionale nel piano dell’arco
β fattore di instabilità
Per archi appartenenti agli schemi a 3 cerniere, a 2 cerniere e incastrati, il fattore β deve essere determinato dalla tabella 2.1, che lega tale quantità al rapporto f/l tra freccia e lunghezza proiettata dell’arco.
Per archi, invece, con catena e pendini, il fattore β è fornito dalla figura 2-11, in funzione del rapporto f/l e del numero dei pendini “m”.
Per evitare l’instabilità per “snap through”, definita in precedenza instabilità senza biforcazione dell’equilibrio, deve essere soddisfatta la seguente disuguaglianza;
12 > "
dove
A area della sezione dell’arco
J momento d’inerzia della sezione nel piano dell’arco
K fattore definito nella tabella 2.2 in funzione del rapporto f/l
Tabella 2.2 – Fattore K
Per quanto riguarda invece l’instabilità fuori piano, la forza critica assume la seguente espressione:
=
dove
EJ rigidezza flessionale fuori piano
Per archi liberi, il fattore d’instabilità β può essere calcolato come:
= #
dove
β1 fattore dedotto dalla tabella 2.3
Tabella 2.3 – Fattore β1
Tabella 2.4 –Fattore β2
Per i valori da assegnare alle imperfezioni (nel paragrafo precedente ci eravamo limitati alla forma assunta da queste), relativamente al caso di buckling nel piano o fuori piano, devono essere adottate le tabelle 2.5 e 2.6 mostrate di seguito.
PARTE SECONDA:
Capitolo 3
L’INTERVENTO
3.1
Contesto di riferimento
L’intervento prevede la realizzazione di un nuovo ponte sul fiume Serchio, realizzato tra la S.S. n.12 “dell’Abetone e del Brennero” e la S.P. n.1 “Francigena” (Lucca-Camaiore), sito nel territorio del Comune di Lucca a circa 1000 m a monte del ponte esistente denominato “Ponte di Monte San Quirico”. L’obiettivo di tale opera è quello di ridurre i flussi viari, composti anche da una rilevante percentuale di mezzi pesanti, che investono i quartieri attorno al ponte esistente ed i viali di circonvallazione posti a ridosso delle mura seicentesche della città di Lucca. L’area oggetto dell’intervento è quella riportata nella figura 3-1.
Figura 3-1 – Area d’intervento
Il nuovo attraversamento del fiume Serchio risulta un’opera necessaria e non più posticipabile nel tempo in quanto, a fronte di una forte espansione della città anche in sponda destra del fiume (zona denominata Oltreserchio), non è
corrisposta la realizzazione di un adeguato sistema viario. In ambito cittadino, oltre al suddetto “Ponte di Monte San Quirico”, è presente infatti un unico ulteriore attraversamento denominato “Ponte San Pietro” sulla S.R. n.439 “Sarzanese-Valdera”, il quale ha però dimostrato in più occasioni l’inadeguatezza idraulica, anche a fronte di eventi di piena modesti (con TR = 30 anni), costringendo l’amministrazione alla chiusura temporanea della circolazione. Altro collegamento fondamentale tra le due sponde è costituito dal ponte “Gen. Carlo Alberto dalla Chiesa” in località Marlia, posto sulla S.S. n.12 “dell’Abetone e del Brennero”, ma quest’ultimo dista circa 5 km dal capoluogo e, pur svolgendo un ruolo determinate per i flussi viari da e per la valle del Serchio, risulta di difficile utilizzo per gli spostamenti attorno alla città.
Il nuovo ponte risulta inserito tra le opere previste nella riorganizzazione del sistema viario attorno alla città di Lucca e che coinvolgono l’intera piana attorno al capoluogo, ossia il cosiddetto “Sistema Tangenziale di Lucca – Viabilità Est di Lucca comprendente i collegamenti tra Ponte a Moriano ed i caselli dell’Autostrada A11 del Frizzone e di Lucca Est” di cui è stata incaricata della progettazione preliminare la Società ANAS S.p.A. (figura 3-2).
Figura 3-2 – Sistema tangenziale di Lucca ed ubicazione ponte
Dalla figura 3-2 risulta chiaro come il ponte costituisca un nodo strategico del sistema in quanto presenta il duplice obiettivo di realizzare un percorso alternativo agli attuali viali di circonvallazione attorno alle mura della città di Lucca (innestandosi direttamente sull’asse di scorrimento sub-urbano) e di collegarsi, utilizzando il tratto della S.S. n.12 “dell’Abetone e del Brennero” in direzione
nord, alla tangenziale est appena definito (in particolare all’asse nord-sud in località San Pietro a Vico).
L’ambito in cui ricade l’intervento è rappresentato dal tratto vallivo del fiume Serchio nelle immediate vicinanze del capoluogo; in questo tratto il fiume si presenta confinato tra argini in terra e con un alveo inciso molto ampio. Gli spazi golenali laterali sono interessati da colture, prevalentemente sulla sponda sinistra, dove la golena è più ampia, e da vegetazione spontanea sull’altra sponda. Si riportano di seguito alcune foto che mostrano meglio l’area di intervento: in figura 3-3 troviamo la vista del sito dalla sponda sinistra, mentre in figura 3-4 dal “Ponte di Monte di San Quirico”.
Figura 3-3 – Vista del sito dalla sponda sinistra
Il paesaggio dove sorgerà il nuovo ponte è caratterizzato da vaste aree pianeggianti ed ampie vedute verso le colline ed i monti che circondano la città. Sulla sponda destra, oltre l’argine del fiume Serchio, troviamo campi coltivati ed un edificato sparso tipico delle zone a prevalente vocazione agricola, mentre sulla sponda opposta una zona densamente urbanizzata, caratterizzata da insediamenti commerciali ed industriali disposti lungo la S.S. n.12 “dell’Abetone e del Brennero”. Da segnalare la presenza, sulla sponda sinistra, di alcune attività di lavorazione di inerti, poste all’interno delle golene.
Figura 3-4 – Vista del sito dal “Ponte di Monte San Quirico”
La città ha da sempre uno stretto legame con il suo fiume e gli spazi golenali svolgono anche una importante funzione di spazio aggregativo e di tutela della biodiversità. Lungo la sponda sinistra si sviluppa, infatti, il cosiddetto “Parco Fluviale”, comprendente itinerari per passeggiate a piedi o in bicicletta, nonché diverse strutture sportive. In particolare, il percorso ciclo-pedonale, che utilizza l’antica Via Alzaia posta in sponda sinistra del fiume, è stato ricompresso nel più ampio “itinerario ciclo-pedonale di Puccini” che, dalla frazione di Celle di Puccini (Comune di Pescaglia), consente di raggiungere la foce del fiume o, in alternativa, il lago di Massaciuccoli.
In conclusione, il nuovo ponte sul fiume Serchio dovrà garantire il collegamento tra due arterie stradali di primaria importanza, con particolare attenzione all’utenza debole (piste ciclo-pedonali), garantendo il miglior inserimento possibile dell’opera nel contesto territoriale e paesaggistico ed, al contempo, perseguire un’elevata qualità architettonica e strutturale.
3.2
Concezione
La concezione del nuovo ponte sul fiume Serchio deriva da un’attenta valutazione della forma e delle caratteristiche estetiche da attribuire all’opera, in linea con la tendenza moderna di progettazione, la quale vede il progettista nella condizione di ideare l’“oggetto” indipendentemente dai requisiti funzionali richiesti. L’ubicazione dell’opera, infatti, a pochi chilometri a nord della città di Lucca, in
un’area di particolare pregio ambientale, fa assumere ad essa un’importante valenza simbolica, rappresentando una sorta di porta d’ingresso alla città per i traffici provenienti da questa direzione; ciò si può osservare dalla vista aerea della figura 3-5 e dalla planimetria della figura 3-6, ottenute entrambe tramite il software Google Earth.
Figura 3-5 – Vista aerea dell’area di intervento (direzione Sud) tramite Google Earth
Figura 3-6 – Planimetria dell’area di intervento tramite Google Earth
La soluzione adottata prevede la presenza di quattro archi tubolari di grande luce, inclinati verso l’esterno rispetto al piano verticale che li contiene, i quali si slanciano dalla fondazione, posta in mezzeria al ponte, fino a raggiungere l’altezza
massima di progetto, andandosi poi ad incastrare nell’impalcato in prossimità delle spalle.
È stata fatta questa scelta con l’obiettivo di dotare l’opera di caratteristiche di pregio architettonico e di armonia con il contesto paesaggistico circostante. L’arco appare perfetto per questi scopi: le sue linee esprimono la semplicità concettuale e l’essenzialità di cui un ponte deve farsi portavoce, risultando in genere molto adatte in termini di inserimento ambientale. La scelta di uno schema di ponte a via intermedia migliora ancora la situazione da questo punto di vista, data la minor altezza dell’opera rispetto ad una soluzione classica di ponte ad arco a via inferiore, che ne diminuisce la visibilità alle grandi distanze.
La concezione del ponte in esame è stata affrontata valutando progressivamente le possibili soluzioni alle problematiche emergenti, giungendo così a quella che è stata ritenuta l’opera più adatta per il sito in esame. In questo processo sono sempre stati ben chiari alcuni punti base:
- Ricerca della miglior qualità architettonica e strutturale, come da esplicita richiesta del committente
- Inserimento nel contesto ambientale e paesaggistico
- Sensibilità alle richieste di sicurezza e comfort relative alla progettazione stradale
Relativamente a quanto definito nei primi due punti, l’arco risulta sicuramente un’ottima scelta, come già descritto in precedenza, racchiudendo in sé le caratteristiche architettoniche e funzionali richieste, oltre ad inserirsi egregiamente negli ambienti usuali. Le possibili applicazioni di questo schema sono comunque innumerevoli: la disposizione nello spazio, il numero di archi, la posizione rispetto al piano viabile, l’altezza massima raggiunta, etc. sono tutte variabili che possono influenzare, talvolta anche in modo sostanziale, le caratteristiche finali dell’opera e che, quindi, devono essere valutate attentamente.
Come prevedono i moderni criteri di progettazione delle opere di attraversamento, è necessario privilegiare gli aspetti della sicurezza e del comfort alla guida, progettando quindi l’opera in seguito alla definizione del tracciato stradale; in passato, invece, molto spesso la scelta del tracciato era condizionata dalle esigenze strutturali del ponte. La soluzione di viabilità adottata nel caso in esame è quella mostrata in figura 3-7.
Figura 3-7 – Soluzione di viabilità scelta
L’andamento del tracciato stradale, in corrispondenza dell’opera di attraversamento, come si osserva dalla figura, non è completamente rettilineo, ma lo è solo nel primo tratto per poi proseguire secondo una curva circolare. Sulla base di questo tracciato, sono state effettuate tutti gli studi e le valutazioni relative alla concezione dell’opera.
Fermo restando la scelta di uno schema ad arco, per le ragioni già ampiamente descritte in precedenza, la prima questione da considerare riguarda il numero dei piani di sospensione: un solo piano, con arco centrale, o due piani, con archi disposti ai lati dell’impalcato (figura 3-8).
Figura 3-8 – Soluzioni: a) un piano di sospensione; b) due piani di sospensione
La prima soluzione presenta indubbi vantaggi per quanto riguarda l’economia e la rapidità di esecuzione, data la presenza di un unico piano di pendinatura, nonché una visuale più aperta verso il panorama circostante per chiunque transiti sul ponte (veicoli o pedoni), a causa dell’assenza dell’”effetto gabbia” offerto dai
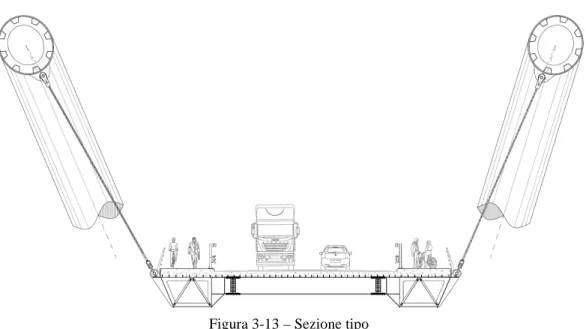
pendini di sospensione. Tuttavia, il ponte ad arco con un singolo piano di sospensione presenta anche diversi svantaggi, primo fra tutti la necessità di disporre di un impalcato torsiorigido, ossia in grado di incassare momenti torcenti sviluppando un comportamento alla “Bredt”, il quale avrebbe richiesto un’altezza maggiore dell’impalcato; inoltre, ponendo l’arco in posizione centrale, anche la larghezza di quest’ultimo sarebbe stata notevolmente maggiore. Questi vantaggi/svantaggi del ponte ad arco ad un piano di sospensione sono validi in generale; nel caso in esame, dobbiamo aggiungere ad essi la difficoltà nella realizzazione di un arco di questo tipo, data la non rettilineità del tracciato. Abbiamo quindi optato per una soluzione a due piani di sospensione, con un impalcato più sottile, meno impattante e caratterizzato da maggior pregio estetico; tale scelta è stata influenzata anche dalla visibilità dal basso che si ha del ponte in esame percorrendo il percorso ciclo-pedonale sulla sponda sinistra del fiume. L’”effetto gabbia” dovuto ai pendini di sospensione è stato limitato optando per una disposizione dei pendini piuttosto rada, dell’ordine di uno ogni 10 m.
L’utilizzo di archi che coprissero l’intera luce del ponte (285 m) è stato sconsigliato in quanto essi avrebbero richiesto un’altezza notevolmente elevata, risultando visibili a grandi distanze e venendo meno, perciò, all’obiettivo di minimizzare l’impatto ambientale dell’opera. La scelta è stata quindi orientata, per tale motivo, su un ponte a via intermedia costituito da due coppie di archi, ognuna delle quali copre circa metà della luce, che andranno a congiungersi in due punti in prossimità della mezzeria del ponte.
Data la geometria del tracciato stradale, risulta naturale pensare ad una soluzione con archi che ne seguano l’andamento: essi possono quindi risultare curvi o contenuti in un piano non verticale (inclinati). La prima alternativa prevede archi che non sono contenuti in un piano, risultando perciò soggetti a componenti di spinta fuori piano; questa considerazione indirizza la scelta verso la seconda soluzione, ossia quella con archi inclinati verso l’esterno, la quale presenta diversi vantaggi. In primo luogo, dal punto di vista estetico ed architettonico, l’arco inclinato appare sicuramente di qualità superiore rispetto all’arco curvo, presentando una linea più semplice e piacevole; inoltre, come già anticipato, anche dal punto di vista funzionale risulta migliore. Per di più, la disposizione degli archi inclinati rende possibile la realizzazione di un’unica fondazione per le due coppie di archi, in prossimità della mezzeria del ponte, di dimensioni non troppo esagerate.
L’inclinazione degli archi deve essere valutata sulla base di diverse variabili in gioco:
- Funzionamento del sistema arco-impalcato, che prevede una minore efficacia al crescere dell’inclinazione, in quanto ad essa corrisponde un