Appendice 1
Improvement factor
Le instabilità del sistema pongono dei limiti su I e sul sistema radar; i limiti provengono dagli oscillatori locali, Stalo e Coho, le cui frequenze possono variare da impulso a impulso, da una variazione di fase prodotta dall’amplificatore di potenza, dall’incapacità del Coho di essere in fase con l’impulso trasmesso, dal time jitter e amplitude jitter sugli impulsi e dal rumore di fase dell’A/D converter. Le limitazioni che portano un contributo maggiore riguardano le instabilità dello Stalo e del Coho; le variazioni di fase sono dovute ai ripple dell’alimentatore di potenza ad alta tensione oppure alla corrente alternata sul trasmettitore.
Per qualificare il comportamento del sistema radar s' introduce un fattore di qualità relativo il filtro MTI, Improvement Factor, definito come
out in SCR I SCR = (1)
dove SCRout è il rapporto segnale clutter all’uscita del filtro di clutter MTI e
in
SCR è il rapporto segnale clutter all’ingresso del filtro di clutter [11], [12], [13].
Per convenzione questo termine viene mediato in modo uniforme su tutta la banda doppler ammissibile per il segnale, dunque la definizione comunemente utilizzata è la seguente
in out out in C S I C S = (2)
Se la banda doppler coincide con quella di rumore, come si assume normalmente allora
(
)
in out N out in C N I CA G C N = = (3)dove CA è definito come CLUTTER ATTENUATION e GN come Guadagno di rumore.
È facile calcolare GN, mentre per il calcolo di CA è necessario conoscere
l’andamento dello spettro del clutter.
Per un filtro FIR , sia W il vettore dei pesi del filtro MTI e z il vettore contenente i campioni del processo di clutter; supponendo che la potenza del processo di clutter
in
C in ingresso al filtro sia pari a 1, allora la potenza Cout in uscita sarà pari a
(
) (
)
{
T H T}
Hout c
H H N in N H H out C C W M W C W W I G C W M W W M W = = = (5)
Bisogna conoscere la matrice di covarianza del clutter MC.
Se il fenomeno di clutter non è prodotto da un oggetto fisso, una parte della potenza del disturbo attraversa il filtro MTI.
Normalmente si ipotizza che lo spettro di potenza del clutter abbia la forma espressa in eq.(6).
Di seguito si mostrerà il contributo del sistema MTI al calcolo dell’Improvement Factor.
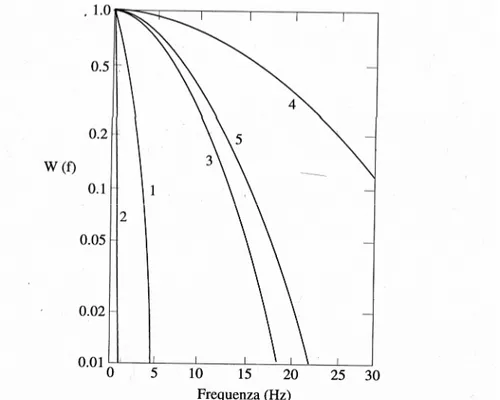
Si consideri un clutter che nel caso di ambiente collinare con pochi alberi e vento ha una deviazione standard σf pari a 1.095, ricavata dalla fig.(1) in cui W f
( )
ènormalizzato.
( )
2 0 2 exp 2 2 f f w f W fσ
σ
π
= − (6)
Figura 1 - Tipici andamenti della densità spettrale per clutter (λ=30 cm)
1. Colline con molti alberi e vento 2. Colline con pochi alberi e vento 3. Mare, con vento
4. Pioggia 5. Chaff
Per un sistema MTI a singola cella di ritardo, si ottiene che
(
)
1 66.6 dB 1 x I PRTρ
= = − (7)1 1 1 1 1 ... s x n I I I I = + + + (9) dove s
I è il limite sul sistema
x
I è il limite imposto dal sistema MTI
1,..., n
I I sono i limiti dovuti alle singole sorgenti di instabilità.
Considerando solo le instabilità dell’amplificatore di potenza e degli oscillatori locali, si avrà 1 2 1 1 1 1 s x I I I I = + + (10)
Per un range clutter R pari a 120 Km, T 2R 0.8 msec c
= = , per una portante
0 8.6 GHz
f = e un errore nella generazione della frequenza trasmessa di 20 ppm
rispetto a fn, si avrà 20log 1 58.73 dB
2 I f I I f T