Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
51
3.
Architettura del sistema
In questo capitolo sarà descritta l’architettura del sistema ideato a partire dai requisiti esplicitati nel paragrafo 2.9. La collaborazione fra l’autore della Tesi ed il team composto dal Prof. Luca Fanucci, dall’Ing. Fabrizio Iacopetti, dall’Ing. Antonio Frello e dai dottori in Ingegneria Meccanica Michele Lombardi e Luca Sciurti ha portato al concepimento di un dispositivo suddiviso in tre sottosistemi opportunamente interfacciati:
• un’infrastruttura meccanica
• un azionamento elettrico
• un sistema di controllo elettronico digitale
Questo ha portato a suddividere il lavoro di progettazione in tre macroblocchi: il primo esclusivamente meccanico di cui si sono occupati i dottori Sciurti e Lombardi, il secondo riguardante l’azionamento elettrico che ha visto la luce grazie al candidato e all’Ing. Frello e l’ultimo relativo all’elettronica di controllo progettato dall’autore della Tesi in stretta collaborazione con i relatori.
Il continuo confronto e la revisione incrociata dei rispettivi passi progettuali hanno altresì permesso una verifica del lavoro più ampia e che coinvolgesse tutti gli aspetti del sistema, facendo sì che venisse in contemporanea curata la compatibilità di quanto progettato.
In questo capitolo viene introdotto brevemente quello che è il disegno meccanico del sistema e spiegato il suo funzionamento; quindi si passa ad illustrare rapidamente gli elementi di trazione e di potenza ed infine del controllo elettronico.
Nei successivi capitoli sarà invece presentata un’approfondita illustrazione dell’hardware progettato ed impiegato.
3.1. Struttura meccanica
La struttura meccanica del sistema è stata concepita e progettata dai dottori in Ingegneria Meccanica Luca Sciurti e Michele Lombardi.
Il team di sviluppo, inizialmente composto da soli esperti in elettronica, ha loro illustrato l’idea alla base del progetto, le dimensioni vincolanti, le dinamiche richieste ed il funzionamento desiderato; successivamente essi hanno elaborato la soluzione riportata in Figura 27.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
52
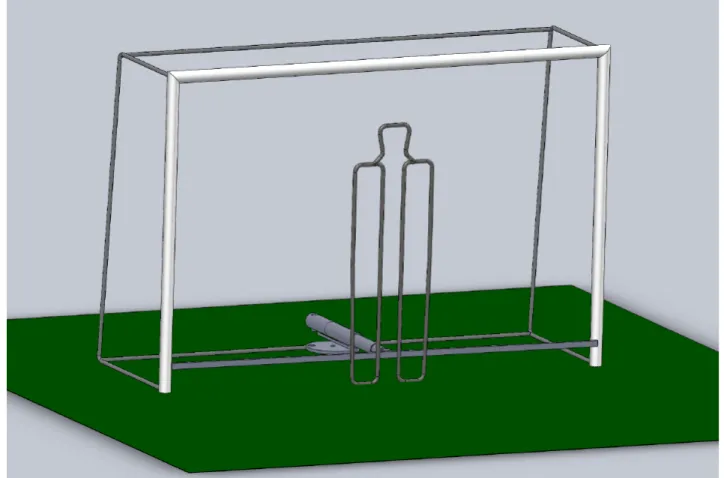
Figura 27 - Vista frontale della struttura meccanica
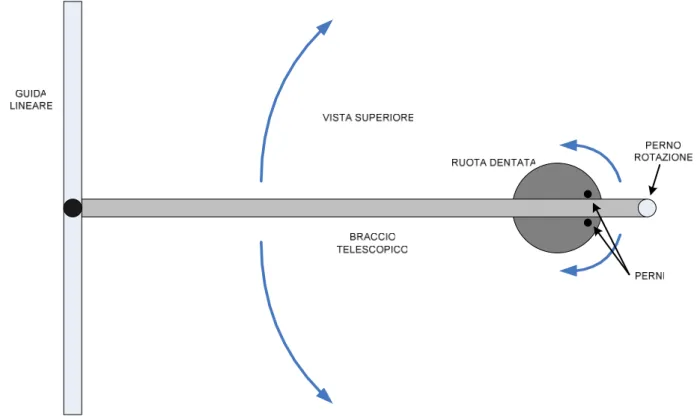
Si tratta di un braccio estensibile vincolato da un lato ad un perno che ne permette la rotazione, dall’altro ad una guida lineare. La rotazione del braccio, a causa del vincolo sulla guida lineare, è causa della variazione di lunghezza dello stesso. Oltre al vincolo sulla guida è presente ai capi del braccio estensibile una sagoma rigida che nella pratica si oppone all’ingresso della palla in porta. La movimentazione viene fornita da una ruota dentata collegata al motore tramite un riduttore.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
53
Figura 28 – Vista dall’alto della struttura meccanica
Figura 29 – Trasmissione della potenza
3.2. Azionamento elettrico
La parte di sistema riferita come “azionamento elettrico” comprende tutti gli elementi elettronici, elettromeccanici e meccanici, che si occupano di fornire la potenza necessaria alla movimentazione della sagoma o, in altre parole, racchiude tutti i componenti che trasformano l’energia elettrica in energia meccanica, convogliandola successivamente all’infrastruttura semovente. In via del tutto generale un azionamento elettrico comprende una fonte di energia elettrica (continua o alternata), un motore elettrico, un alimentatore che pilota il motore (detto anche driver o controller) ed una trasmissione meccanica, solitamente un riduttore.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
54 L’elenco delle specifiche riguardo la movimentazione del sistema El.Go. comprende un importante vincolo sulla dinamica del movimento, in particolare si richiede che l’oggetto abbia la capacità di muoversi con una data rapidità minima, pena la totale o parziale inefficacia della parata e di conseguenza la mancanza di stimolo al gioco da parte dell’utente.
È inoltre richiesto che l’oggetto sia trasportabile ed installabile con facilità anche in zone aperte e prive di alimentazione di rete. Questi vincoli, uniti ad una seppur marginale conoscenza pregressa dei dispositivi trattati, hanno condotto in maniera quasi automatica ad effettuare alcune scelte preliminari di seguito citate:
• alimentazione con batteria ad alta capacità, per poter garantire massima libertà di trasporto ed installazione
• utilizzo di una batteria per autotrazione, la quale solitamente ha una tensione ai propri morsetti di 12V, dato che sul mercato sono disponibili accumulatori a basso costo di questo tipo
• utilizzo di motore elettrico in corrente continua
L’architettura di questa sezione è stata curata in collaborazione con Sciurti e Lombardi in quanto molti degli aspetti dei trasduttori elettromeccanici dipendono da caratteristiche elettriche e meccaniche in maniera congiunta.
Il sottosistema che garantisce il movimento della sagoma si compone essenzialmente di:
• un accumulatore di energia ad alta capacità con tensione nominale di 12V
• un motore elettrico in corrente continua
• un driver di potenza (a ponte H) controllato da un sistema elettronico digitale
• un riduttore
• un encoder incrementale rotativo
Lo schema a blocchi di questi elementi è riportato in Figura 30.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
55 Si rimanda al capitolo 4 il dettaglio dei singoli elementi dell’azionamento elettrico. In tale capitolo verranno inoltre illustrate le ragioni che hanno guidato la scelta di componenti e soluzioni.
3.3. Controllo elettronico
Il primo passo nella progettazione del controllo elettronico è stato l’identificazione delle funzioni da svolgere, nonché degli ingressi ed uscite del sistema.
Da questo si è giunti ad uno schema dal quale si è successivamente estratto e progettato il dettaglio dei singoli blocchi.
3.3.1. Funzionalità del sistema di controllo
Il sistema di controllo ha il compito di acquisire ed elaborare le istruzioni da parte dell’utente e dei sensori per poi impartire gli opportuni comandi al driver motore dell’azionamento elettrico. Come citato si ha intenzione di utilizzare le interfacce dedicate all’utenza diversamente abile perciò non è stato installato nel sistema un terminale nativo bensì l’interfacciamento uomo-macchina avviene tramite uno o più sensori commerciali del tipo mostrato nel paragrafo 1.3.1.
Al fine di garantire un rapido ed intuitivo collegamento con i più comuni switches dedicati all’utenza diversamente abile, si è dotato il sistema di jack femmina mono da 3.5 mm.
Una funzionalità aggiuntiva, derivata dalla volontà di rendere il dispositivo quanto più completo possibile riguardo l’interfacciamento con l’utente, è la connettività Bluetooth che permette di comunicare in maniera wireless con i più comuni HIDs10, tipo tastiera, mouse e joystick di cui sono dotate alcune delle carrozzine elettroniche dedicate agli utenti diversamente abili.
Per garantire il corretto funzionamento e la sicurezza il controllo necessita inoltre di opportuni sensori installati sulla struttura meccanica, in particolare:
• sensori fine corsa, che delimitino l’azione della sagoma entro i pali della porta ed evitino che essa vada a impattare con forza su elementi rigidi della porta o della struttura di guida e sostegno della sagoma.
• sensori di prossimità, che avvisino del pericolo e blocchino la struttura in caso di avvicinamento eccessivo di una persona agli elementi in movimento
Oltre a questo è richiesta la capacità di interfacciamento con l’utente o chi per esso desideri configurare i parametri del dispositivo e leggerne lo stato di configurazione.
Dovendo comunicare con il driver motore a controllo elettronico occorre una opportuna connettività, stabilita sulla base delle interfacce di cui è dotato l’oggetto.
10 Human Interface Devices
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
56 Altre funzionalità e caratteristiche accessorie verranno discusse nel capitolo 5, dedicato alla progettazione dettagliata del controllo elettronico.
3.3.2. Schema architetturale del sistema di controllo
Uno schema a blocchi dei componenti utilizzati per implementare le funzionalità descritte nel paragrafo 3.3.1 è riportato in Figura 31. Con le linee di colore azzurro a doppia freccia si sono riportate le connessioni dati bi-direzionali, a freccia unica le unidirezionali, in nero l’alimentazione regolata, in rosso scuro l’alimentazione diretta a batteria.
Figura 31 – Schema a blocchi del sistema di controllo
Una breve descrizione delle periferiche e delle funzioni specifiche di ciascun blocco è riportata nel seguito:
Microcontrollore
È il cuore del sistema ed ha il compito di analizzare tutti i dati in ingresso fornendo ad ogni istante l’uscita più opportuna verso il driver motore.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
57 Esso si occupa inoltre di gestire tutte le funzionalità accessorie del sistema come l’interfacciamento, la diagnostica, la configurazione e la segnalazione.
Tastierino
Il tastierino occorre all’utente o a chi per esso desideri configurare manualmente il dispositivo nei suoi parametri. Si è inserito principalmente per due ragioni: la prima è quella di avere uno strumento di facile utilizzo con il quale poter impostare i parametri di giocabilità del sistema, la seconda è quella di poter effettuare l’autenticazione di un eventuale dispositivo Bluetooth che si voglia connettere al sistema.
Encoder tastiera
Si tratta di un integrato della famiglia 74 ampiamente diffuso, il suo compito è quello di gestire il tastierino a cui è collegato e formattare una stringa in uscita che rappresenti il codice binario del pulsante premuto; altre funzionalità sono l’eliminazione degli errori e delle pressioni multiple involontarie.
Display
Il display svolge solitamente il duplice ruolo di elemento attivo e passivo di interfacciamento con il sistema, permettendo sia la scelta di una opzione visualizzata ma anche di mostrare semplicemente dati del sistema all’utente. Ad esempio il display è necessario per implementare un menù di sistema con il quale l’utente sceglie le opzioni di configurazione a disposizione.
Transceiver Bluetooth
È un modulo dotato al suo interno di più circuiti integrati e di una antenna, dispone di un firmware e di un set di istruzioni che ne permettono la connessione bidirezionale con un qualsiasi dispositivo Bluetooth.
Interfaccia RS-232
Si tratta di un integrato in grado di traslare i livelli logici di tensione da GND e VCC a quelli adatti
allo standard EIA RS-232v28, questo integrato permette di comunicare con una periferica esterna che utilizza questo standard, in particolare in questa applicazione il driver motore.
Connettori terminale wired
Si tratta di normali prese di tipo jack femmina 3.5 mm, scelte data l’elevata diffusione, fra i sensori per diversamente abili, di connettori jack male della stessa misura.
Sensori fine corsa
I sensori fine corsa, come introdotto nel paragrafo 3.3.2, hanno il compito di avvisare il sistema di controllo che la sagoma in movimento si sta avvicinando al fine corsa meccanico e che quindi il sistema deve bilanciare opportunamente l’erogazione di potenza al fine di non creare un impatto violento fra sagoma ed il fine corsa meccanico della guida lineare. Questa funzione è implementata da microswitch di tipo SPST OFF-(ON) installati sull’infrastruttura semovente.
Sensori di sicurezza
Si tratta di una serie di sensori di prossimità, installabili sulla porta o sulla struttura fisica, che avvisano il sistema quando un giocatore in movimento si trova nei pressi della sagoma.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
58
Regolatore di tensione
Si occupa di fornire una tensione stabile all’intero circuito digitale, erogando una quantità opportuna di corrente; permette inoltre l’accensione e lo spegnimento intelligente del circuito.
Circuito start/stop
È costituito da due semplici pulsanti per l’accensione e lo spegnimento del circuito di alimentazione.
Battery pack
È costituito da accumulatori ricaricabili in grado alimentare il circuito per un tempo ritenuto sufficiente al normale utilizzo del sistema.
Monitor batteria
Si tratta di un circuito integrato in grado di misurare una serie di parametri del sistema come la tensione del pack batteria, la corrente erogata ed altri ancora.
Spie a LED
Sono state inseriti alcuni LEDs con lo scopo di avvisare visivamente l’utente e/o il supervisore delle condizioni del sistema, garantendo perciò una diagnostica minima che avvisi di eventuali errori e malfunzionamenti.
Elementi di minore rilevanza funzionale che si è stabilito inserire nel sistema, ma che per brevità non sono stati descritti nello schema a blocchi, sono:
• connettore per ISP11
• selettore di terminale utente
• freno di emergenza
• ingresso A/D per monitorare direttamente la tensione di alimentazione
• test point
• interruttore di disaccoppiamento batteria
• connettore per alimentatore DC esterno
• selettore di alimentazione
Nel capitolo 5 verranno ampiamente discusse e motivate le soluzioni riguardanti ogni elemento citato sopra, verrà presentato il dettaglio tecnologico di ogni blocco introdotto e descritti i componenti commerciali utilizzati per lo scopo.
Oltre a questo saranno presenti numerosi riferimenti agli accorgimenti adottati affinché il circuito progettato abbia piena funzionalità ed affidabilità senza entrare in condizioni critiche per il funzionamento e per l’integrità dei componenti.
11 In-Circuit Serial Programming