2. LE MISURE DI TRAFFICO
2.1. Lo strumento utilizzato, il Radar Recorder
Le misure di traffico sono state effettuate mediante strumenti digitali denominati
RADARRECORDER. Il RADAR RECORDER è uno strumento:
Non invasivo: non sono necessari lavori stradali di installazione, come avviene per il
posizionamento delle spire elettromagnetiche o di altri tipi di sensori per il rilevamento;
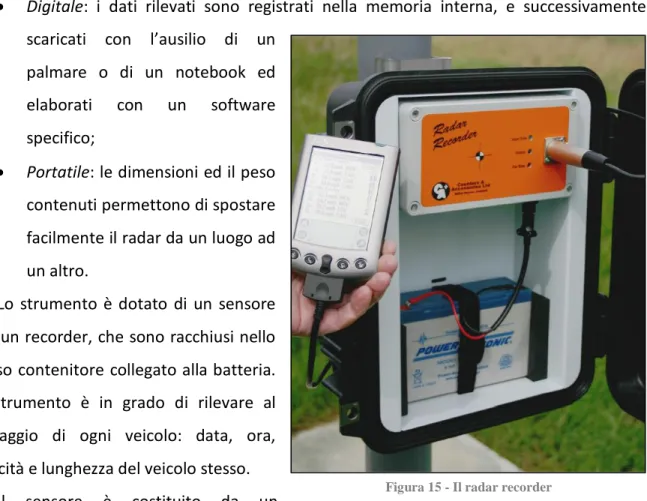
Digitale: i dati rilevati sono registrati nella memoria interna, e successivamente
scaricati con l’ausilio di un palmare o di un notebook ed elaborati con un software specifico;
Portatile: le dimensioni ed il peso
contenuti permettono di spostare facilmente il radar da un luogo ad un altro.
Lo strumento è dotato di un sensore e di un recorder, che sono racchiusi nello stesso contenitore collegato alla batteria. Lo strumento è in grado di rilevare al passaggio di ogni veicolo: data, ora, velocità e lunghezza del veicolo stesso.
Il sensore è costituito da un
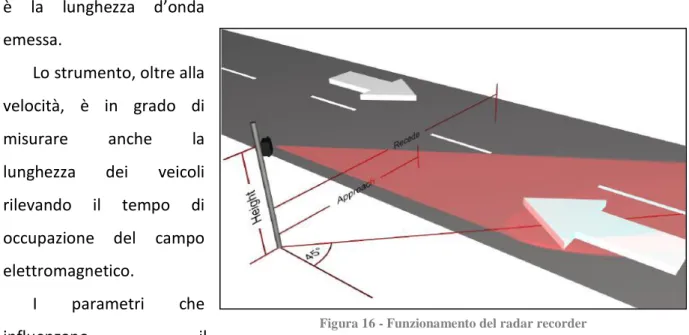
emettitore ed un ricevitore di onde elettromagnetiche e sfrutta l’effetto Doppler-Fizeau per misurare la velocità di avvicinamento e allontanamento del veicolo: quando l’onda emessa, alla frequenza colpisce il veicolo, viene riflessa e l’antenna ne misura la frequenza . Lo strumento calcola lo sfasamento tra le onde e quindi la velocità istantanea del veicolo che è proporzionale a :
dove φ (circa 45°) è l’angolo formato tra la parallela all’asse stradale passante per l’apparecchio e la bisettrice del cono di onde (indicato in rosso nella successiva Figura 16) e λ è la lunghezza d’onda
emessa.
Lo strumento, oltre alla velocità, è in grado di
misurare anche la
lunghezza dei veicoli rilevando il tempo di occupazione del campo elettromagnetico.
I parametri che
influenzano il
funzionamento dell’intero apparecchio sono l’efficienza dell’antenna, la potenza di trasmissione (5 MW), la sensibilità del ricevitore e soprattutto la grandezza del veicolo e l’energia che questo è in grado di riflettere: infatti, la riflessione delle onde elettromagnetiche da parte della superficie del veicolo cambia a seconda della sua composizione e della sua misura, le superfici metalliche sono le migliori, mentre quelle in legno o in plastica riflettono deboli segnali, il che può portare ad errori di valutazione soprattutto dei veicoli pesanti telonati, nei quali la superficie plastica di copertura del piano di carico è molto ampia.
Il radar viene in genere messo in opera posizionandolo sui pali della segnaletica verticale (o comunque su qualunque supporto disponibile) a circa 2m dal suolo e con un’angolazione di 45° rispetto all’asse della strada (Figura 17).
Può essere utilizzato sia in ”normal mode”, ovvero con la corsia in avvicinamento (approach lane) più vicina e quella in allontanamento (recede lane) più lontana, o in “reverse
mode”, esattamente all’opposto.
Una volta posizionato, il radar viene configurato collegandolo al notebook attraverso un cavo seriale. Vengono inseriti i dati relativi alle distanze delle mezzerie delle due corsie
rispetto allo strumento stesso, viene posizionata l’antenna con inclinazione indicata dal software di configurazione e, quindi, si lascia che lo strumento registri i dati.
Sono presenti diverse modalità di pre-elaborazione dei dati, ma è preferibile registrare i dati di ogni singolo
veicolo (lunghezza, velocità, corsia e ora di transito) senza avvalersi di questa possibilità ed effettuare le dovute suddivisioni in classi di lunghezza e/o di velocità successivamente, mediante il software “Vehicle Data Analyzer 2” per la lettura dei dati e “Microsoft Excel” per la loro elaborazione.
Il produttore assicura una precisione del 98% per il flusso sull’approach lane e del 96% per la recede lane.
Lo strumento non è in grado di rilevare i flussi su più carreggiate parallele e su più corsie nello stesso senso di marcia perché si ottiene un numero che include tutti i veicoli della corsia più esterna ed un numero imprecisato dei veicoli sulle corsie più interne.
Un singolo strumento può, però, essere installato su una strada a due corsie e doppio senso di marcia ed è in grado di rilevare i veicoli transitati, contemporaneamente, in entrambe le direzioni.
Il radar va, inoltre, posizionato dove il flusso veicolare scorre liberamente, in assenza di congestione, quindi lontano da incroci, parcheggi, attraversamenti pedonali, e lontano dai punti in cui la “vista” del radar stesso risulti ostruita. Infatti, in presenza di code o comunque veicoli molto ravvicinati, lo strumento non è in grado di registrare la presenza di più veicoli che occupano il cono elettromagnetico, ma registra un unico veicolo di lunghezza molto elevata.
Nella seguente Tabella 2 si riportano tutti i dati forniti dal produttore del RADAR RECORDER:
Figura 17 - Esempio di radar messo in opera (Pietrasanta, Via Santini, Ottobre 2011)
Tabella 2 - Dati tecnici del RADAR RECORDER
Sensore Microonde 24.2 GHz Durata della batteria
opzionale 16 giorni Potenza in uscita 5 MW Temperatura di esercizio Da -40°C a 70°C
Range di velocità 3-199 km/h Peso (con batteria fornita) 6.4 kg
Distanza di rilevamento Fino a 30m Peso (con batteria opzionale) 8.5 kg
Memoria 4 Mb Precisione sulla corsia adiacente > 98%
Durata della batteria
fornita 8 giorni
Precisione sulla corsia
lontana > 96%
Nel paragrafo 5.3“RILIEVI DI TRAFFICO” relativo alla rete di Pietrasanta si riporteranno tutti i dati di traffico rilevati dalle postazioni RADAR.
2.2. Metodo euristico per la costruzione della matrice O/D
I rilievi di traffico effettuati con la strumentazione prima descritta forniscono il valore dei flussi nelle due direzioni in ciascun ramo oggetto di rilievo. Possiamo così sapere i valori dei flussi in entrata ed in uscita dalla rete su ogni ramo che la connette con il resto del grafo viario; nulla sappiamo però circa la destinazione e l’origine degli spostamenti di ciascun utente rilevato dai radar. Essendo impossibile conoscere queste informazioni per ogni utente che utilizza la rete, ci dobbiamo avvalere di un metodo che prova, in via del tutto statistica, a colmare queste lacune. Il metodo utilizzato prende il nome di “Metodo euristico per la costruzione della matrice O/D” che viene di seguito descritto.
È un metodo iterativo che di solito converge in pochi steps e che parte con la sola conoscenza dei flussi in ingresso e in uscita dalla rete, proprio quello che abbiamo.
Supponiamo, per esempio, di avere una rete connessa con il resto del grafo viario esistente da quattro rami e di aver rilevato i flussi su questi quattro rami che sono i seguenti:
Tabella 3 - Portate effettive dei rami esterni della rete
Portata in ingresso Portata in uscita
Ramo 1 1192 1111
Ramo 2 412 537
Ramo 3 1471 806
Ramo 4 240 861
Una volta verificato l’equilibrio della rete tramite l’equazione
facciamo l’ipotesi che il flusso entrante sui diversi rami sia ripartito in proporzione e che sia assente l’inversione di marcia (il centroide di destinazione è sempre diverso dal centroide di origine). Il flusso che entra dal centroide ed esce dal centroide può essere calcolato come:
∑
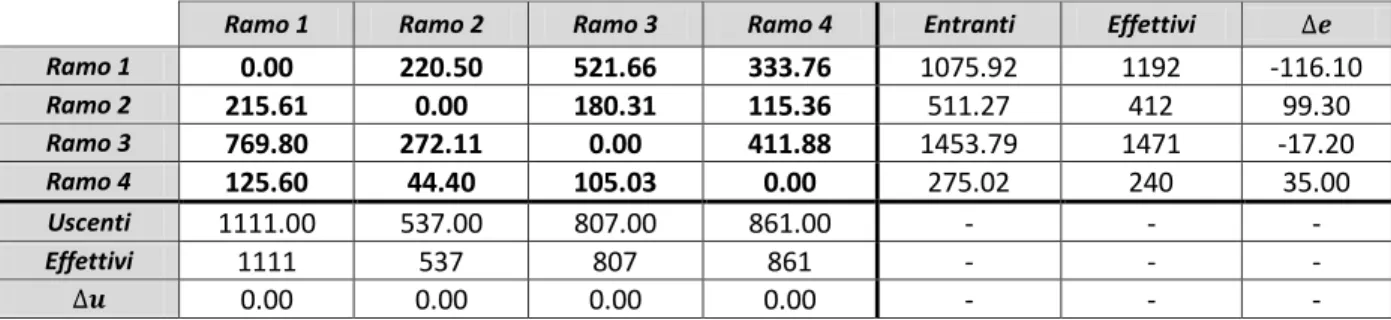
Si ottiene così una matrice iniziale con i diversi flussi calcolati fra i diversi centroidi:
Tabella 4 - Matrice iniziale non compensata
Ramo 1 Ramo 2 Ramo 3 Ramo 4 Entranti Effettivi Ramo 1 0.00 220.50 521.66 333.76 1075.92 1192 -116.10 Ramo 2 215.61 0.00 180.31 115.36 511.27 412 99.30 Ramo 3 769.80 272.11 0.00 411.88 1453.79 1471 -17.20 Ramo 4 125.60 44.40 105.03 0.00 275.02 240 35.00 Uscenti 1111.00 537.00 807.00 861.00 - - - Effettivi 1111 537 807 861 - - - 0.00 0.00 0.00 0.00 - - -
Possiamo notare che il flusso totale entrante, ottenuto come somma delle caselle di una stessa riga, è diverso dal suo valore effettivo riportato in Tabella 3; risulta così necessario compensare l’errore ripartendo proporzionalmente e alternativamente il e il e dando il via al processo iterativo.
Primo passo di compensazione
Si genera una matrice di correzione da applicare alla matrice iniziale. Ciascuna correzione viene calcolata come:
Si ottiene la matrice di correzione:
Tabella 5 - Matrice delle correzioni al passo 1
Ramo 1 Ramo 2 Ramo 3 Ramo 4
Ramo 1 0,00 -23,79 -56,28 -36,01
Ramo 2 41,86 0,00 35,01 22,40
Ramo 3 -9,12 -3,22 0,00 -4,88
Ramo 4 15,99 5,65 13,38 0,00
si ottiene una nuova matrice O/D dove si nota che i valori delle correzioni sono diminuiti rispetto a quelli iniziali della matrice non compensata di Tabella 4:
Tabella 6 - Matrice compensata al passo 1
Ramo 1 Ramo 2 Ramo 3 Ramo 4 Entranti Effettivi Ramo 1 0,00 244,29 577,94 369,77 1192,00 1192 0.0 Ramo 2 173,74 0,00 145,30 92,96 412,00 412 0.0 Ramo 3 778,91 275,33 0,00 416,76 1471,00 1471 0.0 Ramo 4 109,60 38,74 91,66 0,00 240,00 240 0.0 Uscenti 1062,26 558,36 814,90 879,49 - - - Effettivi 1111 537 807 861 - - - -48,74 21,36 7,90 18,49 - - -
Si esegue infine il test di convergenza dell’i-esimo passo:
( | |
( ))
Tabella 7 - Test di convergenza al passo 1
Ramo 1 Ramo 2 Ramo 3 Ramo 4
0.44 0.55 0.09 0.20
Il test non è soddisfatto quindi si procede con la seconda iterazione dalla quale in poi si riportano solamente le matrici con i risultati dei calcoli.
Secondo passo di compensazione
Tabella 8 - Matrice delle correzioni al passo 2
Ramo 1 Ramo 2 Ramo 3 Ramo 4
Ramo 1 0,00 9,34 5,60 7,77
Ramo 2 -7,97 0,00 1,41 1,95
Ramo 3 -35,74 10,53 0,00 8,76
Ramo 4 -5,03 1,48 0,89 0,00
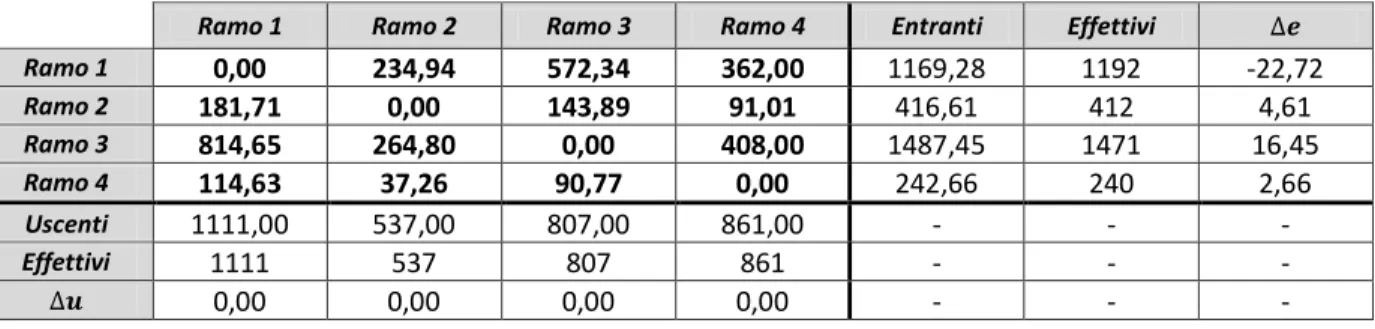
Tabella 9 - Matrice compensata al passo 2
Ramo 1 Ramo 2 Ramo 3 Ramo 4 Entranti Effettivi Ramo 1 0,00 234,94 572,34 362,00 1169,28 1192 -22,72 Ramo 2 181,71 0,00 143,89 91,01 416,61 412 4,61 Ramo 3 814,65 264,80 0,00 408,00 1487,45 1471 16,45 Ramo 4 114,63 37,26 90,77 0,00 242,66 240 2,66 Uscenti 1111,00 537,00 807,00 861,00 - - - Effettivi 1111 537 807 861 - - - 0,00 0,00 0,00 0,00 - - -
Tabella 10 - Test di convergenza al passo 2
Ramo 1 Ramo 2 Ramo 3 Ramo 4
0.10 0.05 0.06 0.07
Terzo passo di compensazione
Tabella 11 - Matrice delle correzioni al passo 3
Ramo 1 Ramo 2 Ramo 3 Ramo 4
Ramo 1 0,00 -4,56 -11,12 -7,03
Ramo 2 2,01 0,00 1,59 1,01
Ramo 3 9,01 2,93 0,00 4,51
Ramo 4 1,26 0,41 0,99 0,00
Tabella 12 - Matrice compensata al passo 3
Ramo 1 Ramo 2 Ramo 3 Ramo 4 Entranti Effettivi Ramo 1 0,00 239,51 583,46 369,03 1192,00 1192 0,00 Ramo 2 179,70 0,00 142,30 90,00 412,00 412 0,00 Ramo 3 805,65 261,87 0,00 403,48 1471,00 1471 0,00 Ramo 4 113,37 36,85 89,77 0,00 240,00 240 0,00 Uscenti 1098,72 538,23 815,53 862,51 - - - Effettivi 1111 537 807 861 - - - -12,28 1,23 8,53 1,51 - - -
Tabella 13 - Test di convergenza al passo 3
Ramo 1 Ramo 2 Ramo 3 Ramo 4
0.11 0.03 0.10 0.02
Quarto passo di compensazione
Tabella 14 - Matrice delle correzioni al passo 4
Ramo 1 Ramo 2 Ramo 3 Ramo 4
Ramo 1 0,00 0,55 6,10 0,65
Ramo 2 -2,01 0,00 1,49 0,16
Ramo 3 -9,00 0,60 0,00 0,71
Ramo 4 -1,27 0,08 0,94 0,00
Tabella 15 - Matrice compensata al passo 4
Ramo 1 Ramo 2 Ramo 3 Ramo 4 Entranti Effettivi Ramo 1 0,00 238,96 577,36 368,38 1184,70 1192 -7,30 Ramo 2 181,71 0,00 140,81 89,84 412,36 412 0,36 Ramo 3 814,65 261,27 0,00 402,78 1478,70 1471 7,70 Ramo 4 114,64 36,77 88,83 0,00 240,24 240 0,24 Uscenti 1111,00 537,00 807,00 861,00 - - - Effettivi 1111 537 807 861 - - - 0,00 0,00 0,00 0,00 - - -
Tabella 16- Test di convergenza al passo 4
Ramo 1 Ramo 2 Ramo 3 Ramo 4
0.03 0.00 0.03 0.01
Il test di convergenza risulta soddisfatto, pertanto il processo iterativo può essere arrestato. Si ottiene così la matrice O/D finale riportata di seguito:
Tabella 17 - Matrice finale del metodo euristico
Ramo 1 Ramo 2 Ramo 3 Ramo 4
Ramo 1 0 239 577 368
Ramo 2 182 0 141 90
Ramo 3 815 261 0 403
Ramo 4 115 37 89 0
Questo metodo può essere facilmente applicato ad una qualunque rete con un qualunque numero di archi in ingresso e in uscita. Il procedimento, ovviamente, rimane identico e cambiano solamente le dimensioni delle matrici in funzione del numero di centroidi presenti nel modello di rete.