Capitolo 3
Descrizione della vettura e definizione
dello schema cinematico in ambiente
Mechanism Design ProE-Wildfire 2.0
®
Il dimensionamento dinamico delle sospensioni dipende evidentemente dalle sollecitazioni cui è soggetto il telaio della vettura, dalla sua rigidezza e dalle caratteristiche elastiche dei pneumatici. La verifica del comportamento cinematico delle sospensioni riveste poi grande importanza, perché consente di stabilire le leggi del moto del sistema ruota-telaio e correggerle, al fine di ottenere un giusto utilizzo dei pneumatici in termini di aderenza, scorrevolezza ed usura. L’analisi cinematica consente di ottenere la legge di azionamento degli elementi elastici da parte della sospensione e di determinare le escursioni richieste ed ammissibili per tali meccanismi. Tale legge correla i valori delle costanti caratteristiche dei gruppi elastici presenti nella sospensione con i valori effettivamente letti alla ruota.
3.1 Breve descrizione della vettura: MASERATI MC12 La vettura oggetto dello studio è la Maserati MC12, messa a disposizione dal Reparto Corse Maserati (Modena), all’interno del quale è stato svolto il seguente lavoro di tesi sotto la guida dell’Ing. Roberto Dlacic, tutor aziendale e in collaborazione con il Dipartimento di Ingegneria Meccanica Nucleare e della Produzione dell’Università di Pisa. Si tratta della versione da pista derivata dalla versione clienti per uso stradale della Maserati MC12, impiegata con successo nel campionato Mondiale FIA GT. Una vettura biposto coupè-spider a coda lunga e passo lungo (2800 mm) di impostazione tipicamente sportivo-corsaiola con tettuccio asportabile. Il motore (V12 di 6 litri e 630 CV) è situato in posizione centrale/posteriore. Lo schema di distribuzione dei pesi prevede una ripartizione di carico del 41% all’anteriore e del 59% al posteriore. Ai fini della rigidezza e della leggerezza strutturale l’impiego di
carbonio, il telaio è del tipo monoscocca realizzato con sandwich di fibre di carbonio essiccato in autoclave sotto vuoto e honeycomb di Nomex® (by ATR Groups). Due telaietti in alluminio fanno da supporto alle componenti di servizio e contribuiscono all’assorbimento di eventuali urti e al raggiungimento di un elevato livello di sicurezza. La MC12 ha le sospensioni posteriori ed anteriori indipendenti con ammortizzatori contrapposti. Queste sospensioni permettono prestazioni eccellenti sia in pista che su strada. I cerchi sono del tipo in lega leggera con sistema di fissaggio centrale mono dado e sono muniti di pneumatici radiali del tipo tubeless. Il diametro delle ruote è di 19", anteriori 9J x 19, posteriori 13J x 19. Pneumatici anteriori 245/35 ZR 19, posteriori 345/35 ZR 19. II sistema di sterzo è del tipo diretto a cremagliera centrale; l’impianto frenante realizzato dalla Brembo è composto da quattro dischi in carbonio, con dischi anteriori 380 mm x 34 mm, posteriori 335mm x 32 mm. Le pinze sono in lega leggera a sei pistoni anteriori e quattro posteriori a diametro differenziato. Il materiale d’attrito delle pastiglie Pagid RS 4.2.1. Il sistema antibloccaggio ABS è Bosch 5.3. Il ripartitore di frenata è a controllo elettronico (EBD) con manettino al volante, regolabile dal pilota direttamente dal sedile di guida. L'aerodinamica è stata messa a punto avvalendosi del contributo tecnico della Galleria del vento del Gruppo Ferrari Maserati, integrato con approfonditi studi matematici CFD, ed è stata poi sviluppata in pista e in strada. All’anteriore il cofano è caratterizzato da due grandi aperture e prese d’aria volte a garantire la migliore fluidodinamica interna e il passaggio dei flussi per assicurare la massima deportanza possibile (carichi verticali) e un valore di efficienza aerodinamica ottimale. Il carico verticale può essere controllato a fermo mediante la regolazione dell’incidenza dell’alettone posteriore. Le modifiche all'incidenza dell'alettone posteriore è realizzata cambiandone i punti di fissaggio, passando il perno di bloccaggio da un foro ad un altro. Nella parte posteriore spiccano il cofano motore e la sottile (circa 30 mm) e imponente ala in carbonio di oltre 2 metri sorretta da due pinne che reca alla base un piccolo spoiler. Nella coda in evidenza il disegno di una mezzaluna rovesciata per gli scarichi aria. Il sotto vettura è interamente carenato e sigillato e si raccorda a due generosi estrattori per conseguire il miglior effetto suolo.
I valori statici di assetto rilevati sulla vettura sono mostrati nella tabella seguente. Lunghezza 5153 mm Larghezza 2096 mm Altezza 1205 mm Passo 2800 mm Carreggiata anteriore 1660 mm Carreggiata posteriore 1650 mm Peso a secco 1.150 kg
Peso in ordine di marcia 1.250 kg
Ripartizione dei pesi 46 % Ant. - 54 % Post.
Tabella 3.1
3.2 Definizione dello schema cinematico della vettura Per analizzare la cinematica delle sospensioni si è partiti dalla costruzione di un modello semplificato in ambiente ProEngineer Wildfire 2.0®. Il sistema a doppio
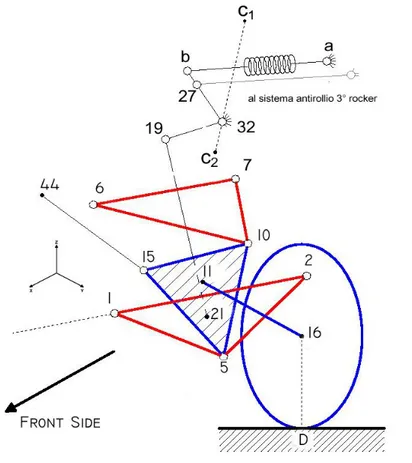
quadrilatero, in letteratura anglosassone Double Wishbone, è lo schema costitutivo del modello in esame, si veda la Figura 3.1. che raffigura la sospensione della ruota anteriore sinistra. Tale geometria offre ottime caratteristiche di rigidezza e resistenza unitamente ad un basso peso. Inoltre tale sistema permette di ottenere ottime caratteristiche cinematiche ed ampie possibilità di regolazione. Il sistema sospensivo vero e proprio è collegato tramite un bilanciere, di seguito rocker, all’asta (puntone) in modo da avere un sistema di tipo push-rod. Il sistema push-rod è formato da un asta che collega il triangolo inferiore al rocker e permette di avere una altezza da terra della vettura molto contenuta, in quanto il gruppo molla-ammortizzatore è posizionato sulla scocca davanti e sopra alle gambe del pilota. E’ inoltre presente un sistema antirollio collegato al rocker in parallelo alle molle (vedi Figura 3.1. sottostante)
non mostrato nella Figura 3.1. poiché non influenza la cinematica della sospensione.
Figura 3.1. Schema a doppio quadrilatero trasversale SLA suspensions - Double Wishbone.
Si consideri lo schema della sospensione rappresentato in Figura 3.1. con il sistema di riferimento solidale al telaio indicato: asse X longitudinale, asse Y trasversale, asse Z verticale. I triangoli 1-2-5 e 6-7-10 in rosso in figura, sono collegati al telaio tramite coppie sferiche nei nodi 1,2 ,6 e 7, costituenti perciò vincoli esterni, mentre il porta mozzo 5-10-15 in blu in figura, è connesso ai triangoli sopradescritti in 10 e 5 sempre mediante coppie sferiche, ma costituenti vincoli interni. I triangoli sono pertanto obbligati a ruotare intorno agli assi 1-2
(quello inferiore) e 6-7 ( quello superiore) in generale sghembi e non paralleli ad alcun asse di simmetria della vettura: le traiettorie dei punti 5 e 10 sono quindi circonferenze ortogonali a tali assi. Il porta mozzo si orienterà parallelamente alla direttrice 5-10, assumendo una posizione angolare univocamente determinata rispetto a tale direttrice, in quanto la presenza dell’asta 15-44 (tirante di sterzo) vincola il punto 15 a mantenersi a distanza costante dal punto fisso 44. E’ pertanto determinata univocamente anche la posizione dell’asse ruota stessa rispetto al
telaio, in quanto l’asse ruota è solidale al porta mozzo. Muovendo il punto 44 lungo l’asse Y, trasversalmente rispetto al telaio della vettura, si realizza il meccanismo di sterzata, in quanto si permette al porta mozzo ed alla ruota di assumere una diversa posizione angolare intorno all’asse 5-10. Il vincolo esterno nel punto 44 sarà pertanto un glifo nel caso della sospensione anteriore, una semplice cerniera sferica nel caso della sospensione posteriore. E’ pertanto possibile, in virtù di quanto sopra detto,distinguere fra sospensioni anteriori sterzanti, a punto 44 mobile secondo una determinata direttrice, e sospensioni posteriori non sterzanti,a punto 44 fisso. Il cinematismo 1-2-5 e 6-7-10 ha il compito di controllare il movimento della ruota rispetto al telaio. Il trasferimento delle sollecitazioni dalle ruote al telaio avviene per mezzo dell’asta 19-21 (detta puntone o push-rod), solidale al triangolo inferiore 1-2-5. Essa mediante il bilanciere (rocker) 19-27-b, ruotante intorno all’asse c1-c2 , di direzione assegnata
fissato sul telaio, comprime il gruppo molla-ammortizzatore compreso fra i punti b
del bilanciere e a fisso sul telaio mediante un vincolo esterno ancora del tipo a cerniera sferica.
3.3 Descrizione del sistema usato in Maserati: S.G.S. 2 ( Suspension Geometry Simulator-2 ) e modello per l’analisi statica e cinematica
Si è costruito il modello del sistema di sospensioni, parametrizzandone la geometria per punti. Per fare questo si è fissato un sistema di riferimento cartesiano solidale alla vettura con origine sul piano di simmetria longitudinale, ad una altezza pari a quella dei centri ruota in condizioni statiche, a metà della distanza fra gli assali, con l’asse X diretto nella direzione di avanzamento della vettura, l’asse Y rivolto verso la ruota esterna a destra ed asse Z rivolto verso l’alto. E’ stato poi numerato ogni punto caratteristico, posto all’estremità di ogni parte del sistema. Questi punti verranno poi a coincidere con i centri dei giunti di collegamento tra i diversi particolari.
All’interno del software ProEngineer Wildfire 2.0® è stato dapprima modellato il
sistema cad semplificato delle sospensioni anteriori e posteriori della vettura. Si è poi proceduto ad effettuare le seguenti analisi:
• Individuazione dei joint axis e inserimento dei servo motors • Analisi Statica
• Creazione delle misure caratterizzanti i parametri di interesse • Analisi Cinematica
• Analisi di Assieme ripetuto (Repeated Assembly)
• Esecuzione delle analisi cinematiche ed animazione del modello • Simulazioni dell’ escursione ruota ±40mm
• Generazione dei grafici risultanti dalle simulazioni
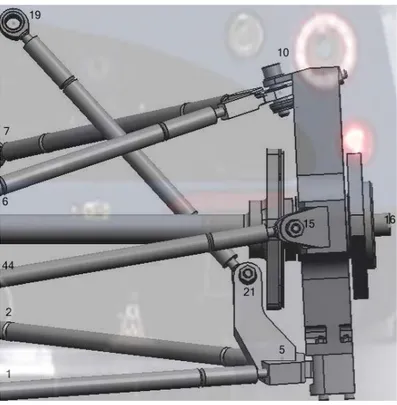
3.4 Descrizione della sospensione anteriore La sospensione anteriore è del tipo a triangoli sovrapposti con puntone push-rod e monoammortizzatore regolabile in compressione ed estensione (vedi schema in figura).
Fig. 3.2- Schema sospensione tipo PUSH-ROD
Il tirante del sistema antirollio è collegato ad un terzo bilanciere centrale che è libero di ruotare (precaricato da due ammortizzatori centrali fissati sul telaio) trasversalmente all’interno della struttura ausiliaria in alluminio imbullonata sul telaio, che racchiude tutto il sistema anti rollio. In bumping, essendo uguali per ogni ruota le escursioni da terra, lavorano soltanto gli ammortizzatori principali, mentre il terzo bilanciere centrale ruota liberamente e la rigidezza del sistema antirollio non interviene. Quando invece una ruota ha una escursione maggiore dell’altra, in rollio ad esempio, il terzo rocker ruota intorno all’asse individuato dalle due cerniere in 29
e 29P trasversalmente e a contrastare questo spostamento è uno dei due ammortizzatori secondari centrali che costituiscono il sistema antirollio. Questo essendo tozzo e di piccole dimensioni, conferisce grande rigidezza torsionale all'avantreno. Ogni lato della sospensione anteriore pertanto comprende: un triangolo superiore;un triangolo inferiore; un puntone push-rod; un ammortizzatore; un bilanciere che alloggia la testa dell'ammortizzatore e gli uniball del puntone push-rod e del tirante connesso al terzo bilanciere (rocker) del sistema antirollio, essendo comune ad entrambe le sospensioni anteriori. Di seguito sono descritte le possibili regolazioni statiche dei parametri di assetto, realizzabili in maniera immediatamente desumibile dall'esame della parte anteriore della vettura: la regolazione in altezza della parte anteriore del telaio può essere ottenuta agendo sugli uniball dei puntoni; la regolazione della convergenza può essere effettuata tramite i tiranti dello sterzo; la regolazione della campanatura può essere eseguita mediante spessori montati sul porta mozzo. La sospensione anteriore è realizzata quindi dall’insieme di push-rod e monoammortizzatore e dal sistema di antirollio - terzo bilanciere - ammortizzatori. L’ammortizzatore è del tipo SACHS Formula Through Rod Damper, regolabile in compressione ed in estensione e comprende: un regolatore di estensione, un serbatoio di azoto, un regolatore di compressione.
3.5 Descrizione della sospensione posteriore La sospensione posteriore non si differenzia sensibilmente dall'anteriore; essa presenta i due ammortizzatori, uno per ogni ruota, collegati in parallelo tramite il sistema antirollio. I due ammortizzatori sono connessi singolarmente ai relativi push-rod mediante due oscillatori a bilanciere. Ogni lato della sospensione posteriore comprende: un triangolo superiore, un triangolo inferiore, un puntone push-rod, un ammortizzatore, un oscillatore a bilanciere che alloggia la testa dell'ammortizzatore, gli uniball del puntone push-rod e del tirante connesso al terzo bilanciere del sistema antirollio. Di seguito sono descritte le possibili regolazioni statiche dei parametri di assetto, realizzabili in maniera immediatamente desumibile dall'esame della parte posteriore della vettura: la regolazione in altezza della parte posteriore del telaio può essere ottenuta
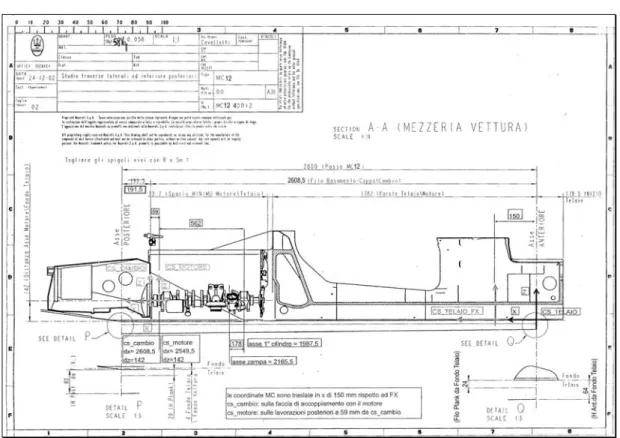
effettuata per mezzo di spessori montati sulla bielletta; la regolazione della campanatura può essere realizzata variando la posizione di attacco sul porta mozzo. La sospensione posteriore è realizzata pertanto dall'insieme di push-rod e dei due ammortizzatori. Questi ultimi sono del tipo SACHS Formula Through Rod Damper regolabili in compressione ed in estensione e comprendono: un regolatore di estensione, un serbatoio di azoto, un regolatore di compressione. 3.6 Sistema di riferimento Non potendo disporre dei disegni di progettazione della vettura, si è provveduto alla analisi dei gruppi sospensione ed alla misura delle caratteristiche dimensionali delle varie componenti, al fine di identificarne i meccanismi. La vettura è stata quindi oggetto di misurazioni, con l’obbiettivo di rilevare correttamente le posizioni assolute dei gruppi e dei relativi punti di fissaggio al telaio: ciò ha consentito di definire univocamente la geometria di base per la simulazione del comportamento cinematico. La geometria della sospensione è stata riportata alla definizione dei punti caratteristici, mediante le coordinate degli stessi nello spazio, in un sistema di riferimento assoluto per ogni singolo asse definito da una terna cartesiana (X, Y, Z). L'asse X rappresenta l'asse longitudinale, disposto secondo il senso di marcia della vettura e passante per la mezzeria della ruota. L'asse Y rappresenta l'asse trasversale ed è orientato verso l'esterno; l'origine dell'asse Y è data dall'intersezione dello stesso, passante per la mezzeria della vettura, con l'asse X longitudinale sopra definito. L'asse Z rappresenta l'asse verticale, ortogonale al suolo ed orientato verso l'alto: esso ha come origine il punto di intersezione dei due assi sopra definiti, ed è posto 2 mm al di sotto della superficie lavorata (Filo Plank) sul fondo del telaio (vedi la Figura in allegato).
Figura 3.3 Sistema di riferimento-Coordinate System MC12
Occorre notare (vedi nei dettagli Q e P in fig.3.4 e 3.5.) che sono stati definiti due sistemi di riferimento assoluti, uno per ogni treno, in quanto lo studio è limitato all'analisi di una sospensione per volta, prescindendo dal comportamento congiunto di tutte e quattro le ruote,analisi questa che verrà svolta in seguito. Nelle figure in dettaglio che seguono sono evidenziate le superfici di riferimento rispetto alle quali è assunta la posizione zero, l’origine dell’asse Z. Essa è posta 2 mm al disotto della superficie lavorata del telaio (denominata filo plank) che individua peraltro l’altezza da terra. Nelle figure seguenti è evidenziato il piano di riferimento per la quota Z=0 posto 2 mm al disotto della superficie lavorata del telaio (denominata filo plank) che individua così univocamente l’altezza da terra.
Figura 3.4. Dettaglio P Figura 3.5. Dettaglio Q
3.7 Misura dei punti e degli elementi costituenti le sospensioni I valori dei punti e degli elementi misurati, tutti precedentemente descritti, sono stati riportati negli opportuni sistemi di riferimento, quindi inseriti nelle tabelle seguenti. Lo studio viene svolto separatamente per la sospensione anteriore e la posteriore. Le coordinate dei punti riportate sono relative a particolari valori dei parametri di assetto: essi costituiscono il cosiddetto assetto statico, ovvero la configurazione con la quale la vettura viene preparata per correre. Durante la messa a punto in officina, infatti, i tecnici agiscono sugli elementi regolabili dei gruppi sospensione fino ad ottenere la configurazione desiderata. Non potendo però controllare le coordinate dei punti nodali, i tecnici del Reparto Corse esaminano esclusivamente i valori assunti dai parametri di assetto, a cui gli snodi sono biunivocamente riconducibili.
3.8 Schema della Sospensione Anteriore; S . G . S – 2 I valori definiti iniziali per la sospensione anteriore, di partenza per le valutazioni discendenti dall'analisi numerica, sono i seguenti:
Raggio ruota 327.05 mm
Camber iniziale -2.95°
Convergenza iniziale -0.0025°
Altezza Anteriore Filo Plank da terra 40 mm
Altezza Ant. da Filo Plank a Fondo Telaio 24 mm
Altezza Ant. da fondo telaio a terra 64 mm
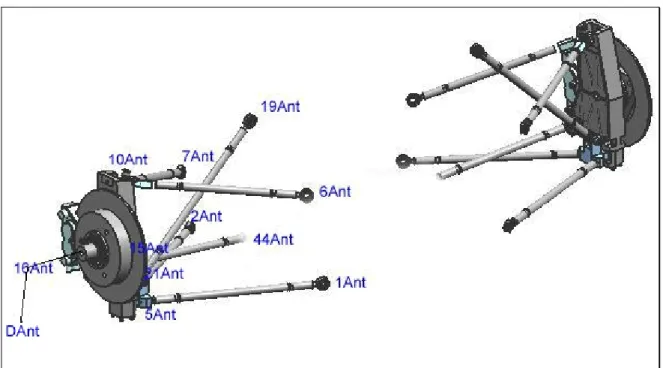
Di seguito sono riportate, in tabelle ed in tavole bidimensionali, le misurazioni rilevate degli elementi costituenti la sospensione, delle coordinate dei punti di fissaggio e degli ulteriori nodi salienti.
Figura 3.6. Modello cad sospensione anteriore e sistema antirollio.
3.9 Schema della Sospensione Posteriore; S . G . S – 2 I valori definiti iniziali per la sospensione posteriore, di partenza per le valutazioni discendenti dall'analisi numerica, sono i seguenti:
Raggio ruota 362.05 mm
Camber iniziale -0.999°
Convergenza iniziale 0.00005°
Altezza Posteriore Filo Plank da terra 60 mm
Altezza Post. da Filo Plank a Fondo Telaio 24 mm Altezza Posteriore da fondo telaio a terra 84 mm
Tabella 3.3
Di seguito sono riportate, in tabelle ed in tavole bidimensionali, le misurazioni rilevate degli elementi costituenti la sospensione, delle coordinate dei punti di
fissaggio e degli ulteriori nodi salienti. La geometria della sospensione posteriore è simile a quella anteriore.
Viene di seguito mostrato nella Figura 3.7. il modello cad dal quale si può rilevare lo schema cinematico della sospensione posteriore sinistra dall’analisi dei punti e dei nodi costituenti i joint ball. E’ il solito schema a quadrilatero articolato, del tipo a triangoli sovrapposti con puntone push-rod e monoammortizzatore regolabile in compressione ed estensione. I due ammortizzatori sono connessi singolarmente ai relativi push-rod mediante due oscillatori a bilanciere (rocker) e sono incernierati sul telaio tramite un telaietto di alluminio. Completa il tutto il sistema di antirollio già descritto per la sospensione anteriore.