1
Capitolo 1
L’uso del software MSC-ADAMS nella
progettazione
Il calcolo dei carichi agenti sui carrelli aeronautici nelle varie fasi di funzionamento è un elemento essenziale nella loro progettazione.
Nella maggior parte dei casi, i problemi di vibrazione e di rotture per fatica, che si verificano nei carrelli, sono dovuti alla difficoltà nella determinazione delle storie di carico che, governate da complessi accoppiamenti dinamici esistenti tra le diverse parti che costituiscono queste strutture, risultano difficili da valutare.
Un metodo usato per determinare in maniera realistica questi carichi è quello di costruire dei prototipi con i quali simulare le varie condizioni di funzionamento.
L’aspetto negativo di questo tipo di approccio alla progettazione è che, se non integrato da studi teorici effettuati con l’ausilio di opportuni modelli matematici attivati sui calcolatori, rischia di diventare un inutile spreco di risorse.
La scrittura dei codici di calcolo non è agevole né veloce, perché, per implementare sui calcolatori i modelli matematici che rappresentano in maniera approssimata il comportamento dinamico di un particolare dispositivo, bisogna scrivere programmi contenenti migliaia di righe e testarli per verificarne le prestazioni.
Un’azienda americana leader nello sviluppo di programmi agli elementi finiti, la MSC-SOFTWARE, ha realizzato da qualche anno un codice denominato ADAMS [1], dedicato proprio al calcolo dei carichi dinamici agenti sulle strutture.
Il programma si presenta come un ambiente CAD simile a quelli già in circolazione, nel quale è possibile modellare prima tutte le parti che costituiscono un dispositivo meccanico, poi vincolarle tra loro sfruttando le tools predisposte dal programma, ed infine assegnare loro i modelli matematici che ne simulano il funzionamento.
ADAMS contiene già alcuni modelli: quelli dei pneumatici, quelli per la simulazione del contatto tra corpi elastici, modelli di ammortizzatori ed altri ancora; inoltre è possibile realizzare modelli definiti dall’utente per rappresentare fenomeni non considerati nel software, o per usare schemi diversi da quelli presenti in ADAMS per descrivere il funzionamento di un componente.
Il linguaggio di programmazione usato in ADAMS per scrivere i modelli è il FORTRAN 77 ma, per i modelli definiti dall’utente, può anche essere usato il C++.
Grazie ad un efficace postprocessor, è possibile tenere sotto controllo le variabili di progetto con l’ausilio di filmati che visualizzano i movimenti della struttura e contemporaneamente mostrano su grafici dinamici i valori delle grandezze d’interesse. Tutto questo rende il software un potente strumento a disposizione degli ingegneri che possono sperimentare soluzioni progettuali per le quali altrimenti dovrebbero essere messi in pratica appositi codici di calcolo.
I modelli realizzati con il programma della MSC-SOFTWARE hanno bisogno di essere testati, ma si riesce a farlo in un intervallo di tempo minore rispetto a quello necessario alla regolazione di un normale codice di calcolo, perché, mentre in un normale programma realizzato dall’utente bisogna scrivere numerose righe e poi provarne i risultati, in ADAMS si sfrutta un’efficiente interfaccia grafica per creare virtualmente il componente al quale poi è assegnato un modello di calcolo in maniera semplice e veloce.
2
Tutto ciò comporta che gli unici programmi da scrivere, nel caso in cui i modelli matematici da utilizzare non siano contenuti nel programma, abbiano sicuramente molto meno righe rispetto agli altri software e in ogni caso, nel complesso, la regolazione del modello virtuale risulta essere molto più semplice ed immediata di quella di un normale programma.
Si riesce inoltre a fare un uso più oculato dei prototipi perché essi si costruiscono solo quando si è sicuri che qualitativamente una determinata scelta progettuale fornisca le prestazioni richieste.
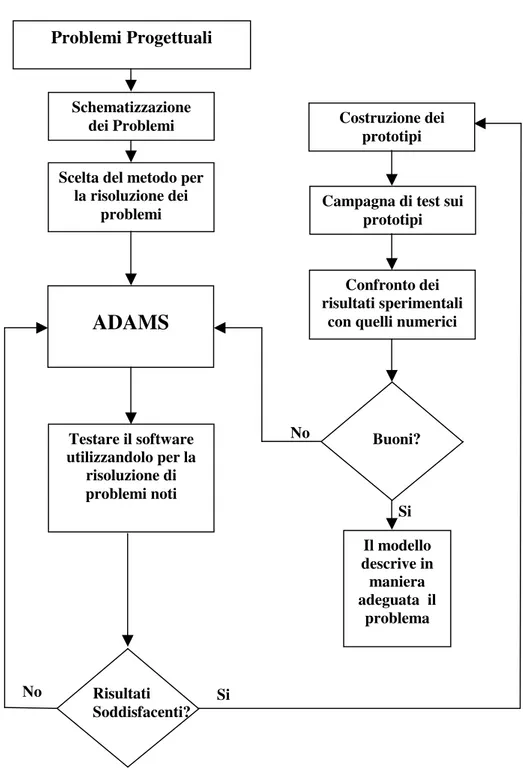
In figura 1.1 e figura 1.2 sono riportati due schemi di possibili approcci alla progettazione di un sistema meccanico, ed in particolare viene considerata la fase del computo successiva alla scelta di una possibile architettura della struttura.
A tale scopo nel primo si utilizza un codice di calcolo definito dall’ utente nel secondo si usa ADAMS.
Nei diagrammi si riassumono le prestazioni dei due metodi di progettazione, mostrando il risparmio di tempo che si ottiene utilizzando ADAMS soprattutto nella fase di messa a punto dei modelli, nel caso in cui il confronto con i dati sperimentali non dia i risultati richiesti.
3
fig.1.1 Diagramma di flusso di un possibile modello definito dall’ utente per i calcoli progettuali Si No Si Buoni? No Risultati Soddisfacenti? Problemi Progettuali Schematizzazione dei Problemi Scelta del metodo per
la risoluzione dei problemi Codice di Calcolo
implementato dall’utente Scelta del linguaggio con il quale scrivere i
programmi Scelta dei modelli di calcolo necessari per la descrizione dei fenomeni fisici Scrittura del programma Testare il software utilizzandolo per la risoluzione di problemi noti Costruzione dei prototipi Campagna di test sui
prototipi Confronto dei risultati sperimentali
con quelli numerici
Il modello descrive in maniera adeguata il
4
fig. 1.2 Diagramma di flusso di un possibile modello ADAMS per i calcoli progettuali
Dall’ analisi appena fatta, risulta evidente come l’ uso di ADAMS dia la possibilità di avere un approccio organico alla progettazione, ottenendo gli stessi risultati di un buon codice di calcolo con un’ utilizzo migliore delle risorse.
In una progettazione moderna market oriented, dove l’ azienda deve presentarsi sul mercato con prodotti efficaci ed efficienti e bisogna tener conto anche delle esigenze economiche, oltre a considerare aspetti puramente ingegneristici, l’ uso di un software simile ad
Si No Si Buoni? No Risultati Soddisfacenti? Problemi Progettuali Schematizzazione dei Problemi Scelta del metodo per
la risoluzione dei problemi Testare il software utilizzandolo per la risoluzione di problemi noti Costruzione dei prototipi Campagna di test sui
prototipi Confronto dei risultati sperimentali
con quelli numerici
Il modello descrive in maniera adeguata il problema
ADAMS
5
ADAMS può portare ad una riduzione dei costi in fase di progetto concettuale, ad un maggior controllo di tutti i parametri che lo governano, alla possibilità di analizzare un numero elevato di soluzioni e alla riduzione dei tempi necessari alla progettazione.
Il programma può essere usato durante tutta la fase di elaborazione tecnica, specialmente in quella concettuale in cui le correzioni sono sicuramente meno costose.
ADAMS in questa fase iniziale, grazie alla bontà ed alla complessità di alcuni modelli contenuti, riesce a far vedere al progettista andamenti nei carichi che altrimenti non sarebbe possibile valutare fino alla costruzione del primo prototipo.
Dopo la realizzazione del modello di prova, è possibile preparare i modelli contenuti nel programma in modo tale da avere spettri di carico realistici che possono essere usati per una progettazione a fatica e per uno studio in frequenza sul comportamento del sistema, valutando i diversi accoppiamenti dinamici tra le parti che compongono la struttura.
L’ approccio organico che si ha con ADAMS porta vantaggi in particolare nella progettazione di sistemi complessi come un’ aereo, per la quale le aziende devono stanziare ingenti capitali e l’ uso del programma è un mezzo efficace per il contenimento dei costi. Una struttura complessa come quella di un aereoplano prevede numerosi studi e prove per la realizzazione di tutti i singoli sottosistemi che nell’ insieme formano la struttura principale; inoltre poiché questi studi coinvolgono diversi rami dell’ ingegneria come quello strutturale, aerodinamico, controllistico, aeroelastico, termodinamico, gestionale, affinché si possa avere un’ approccio organico ad un sistema così complesso, ogni singolo sottosistema di cui un’ aereo è composto, per il quale servono competenze specifiche, deve essere progettato separatamente, ponendo tuttavia particolare attenzione alle problematiche di integrazione nel sistema in modo tale da avere probabilità elevate che la macchina soddisfi le specifiche richieste e le normative in vigore, che in campo aeronautico sono molto stringenti (FAR 25).
L’ uso di ADAMS per il progetto di un prodotto simile permette di poter sviluppare separatamente e in maniera ottimale, tutti i sistemi di cui l’ aereo è composto ed unirli in un unico modello dell’ aereo completo, sul quale fare diverse simulazioni per testare il comportamento del velivolo durante tutte le fasi di volo, manovre a terra, decollo, e atterraggio, che caratterizzano la sua vita operativa.
In questo modo, alla fine della campagna di prove, si ha a disposizione un quadro completo del funzionamento della macchina senza aver dovuto costruire un numero eccessivo di prototipi e con poche prove full-scale.
Per un’ azienda con un’ esperienza decennale nella costruzione di velivoli, l’ aver a disposizione un background culturale e sperimentale molto ampio semplifica quella che è la fase di messa a punto del software, che potrebbe essere fatta attraverso un confronto con dati sperimentali provenienti da aerei simili, per i quali siano disponibili database contenenti i carichi in volo e a terra misurati durante le tipiche missioni dell’ aereo.
Tutti i modelli sviluppati in questa tesi per il calcolo dei carichi dinamici agenti sul carrello potrebbero in seguito essere utilizzati in un modello dell’ aereo completo.
6
7
8 fig.1.5 Analisi cinematica dei carrelli
9
1.1 Problemi nella progettazione dei carrelli
La descrizione della dinamica dei carrelli aeronautici è da anni oggetto di studi teorici e sperimentali, attraverso i quali si cerca di capire la natura dei diversi fenomeni di vibrazione che s’ innescano in queste strutture durante le fasi di atterraggio, decollo, rullaggio e manovre al suolo, quali shimmy e brake-induced-vibration.
Allo stato attuale della tecnica, ancora non sono ben chiare le cause dei suddetti fenomeni, che comportano problemi dovuti all’ eccessiva usura ed alla diminuzione della vita a fatica delle diverse parti dei carrelli, oltre a determinare un calo nel comfort di passeggeri e piloti.
E’ di vitale importanza nella progettazione di questi sistemi, il poter conoscere le relazioni che legano la dinamica della struttura a queste oscillazioni auto-indotte, in maniera da realizzare carrelli che, già sulla carta, siano esenti da questi tipi di problemi che molte volte vengono scoperti solo quando la struttura è già stata costruita.
Per fare ciò, bisogna sviluppare dei modelli di calcolo che riescano a descrivere la dinamica dei carrelli in maniera adeguata, però, ad oggi, ancora non si riesce a mettere a punto schemi che garantiscano la risoluzione dei suddetti fenomeni.
Questo è dovuto alla notevole complessità del problema, il quale include un numero elevato di parametri che nel corso degli anni, dopo numerosi studi ed esperimenti, hanno dimostrato di essere importanti nella descrizione dello shimmy e delle brake-induced-vibration.
Questa indeterminazione è dovuta principalmente al forte accoppiamento che esiste tra la struttura flessibile degli aerei, l’ elasticità stessa dei carrelli e la dinamica delle ruote.
Lo shimmy, che cinematicamente può essere definito come la tendenza di una ruota a muoversi su un percorso sinusoidale piuttosto che su una linea retta, dipende da numerosi fattori tra i quali: bassa rigidezza torsionale della struttura, gioco eccessivo tra le parti dei carrelli, ruote sbilanciate, parti usurate.
Lo studio di questo fenomeno è iniziato intorno al 1920 con un parallelo tra problemi dinamici di automobili e carrelli di atterraggio [2].
Nel corso degli anni sono stati scoperti molti parametri che caratterizzano lo shimmy: la rigidezza torsionale e laterale della struttura, il momento d’ inerzia delle ruote, le proprietà dei pneumatici, il peso della struttura e l’ elasticità del velivolo.
Inoltre studi specifici sull’ interazione tra le caratteristiche dinamiche delle strutture dei carrelli, le ruote, i pneumatici e le imperfezioni stradali, hanno portato alla scoperta di una dipendenza tra la frequenza di oscillazione dei carichi verticali agenti sui pneumatici e lo shimmy, scoprendo che quando la frequenza di quesi carichi è circa il doppio di quella di shimmy si ha una diminuzione della stabilità [2].
Inoltre si è avuto un peggioramento dello shimmy con l’ avvento dei moderni velivoli sempre più grandi e sempre più flessibili, con velocità al suolo più elevate, e operanti su piste con superfici al di sotto degli standard tradizionali.
Le brake-induced-vibration includono condizioni note come gear walk, squeal e chatter, causate dalle caratteristiche della frizione tra le parti rotanti e non-rotanti dei freni.
Lo squeal è una vibrazione rotazionale di alta frequenza dovuta allo statore, mentre il chatter e il gear walk sono oscillazioni di più bassa frequenza in senso longitudinale della struttura del carrello [2].
Con l’ avanzare del progresso tecnologico, negli aerei sono stati introdotti sistemi frenanti sempre più piccoli, con sempre maggiore energia da dissipare, con strutture frenanti fatte con materiali sempre più resistenti, provocando così un aumento delle vibrazioni dovute alle azioni di frenata.
10
Le oscillazioni auto-indotte sono causate da smorzamenti negativi che aumentano a causa delle variazioni del coefficiente d’ attrito tra statore e rotore con la loro velocità di strisciamento.
Questo cambiamento nel segno dello smorzamento fa sì che le forze che dovrebbero attenuare le oscillazioni invece le amplifichino, dando luogo a delle oscillazioni auto-sostenute.
Inoltre un contributo a queste oscillazioni può essere fornito anche dalle irregolarità nelle superfici di attrito.
Alla luce di tutto questo, per poter realizzare dei simulatori che riescano a descrivere in maniera adeguata il comportamento dinamico di queste strutture, è necessario considerare modelli matematici che tengano conto della flessibilità degli aerei, di quella dei carrelli, di quella degli attacchi carrello-aereo, degli accoppiamenti dinamici tra le diverse parti che costituiscono i carrelli e le ruote.
E’ comunque indispensabile utilizzare modelli di prova per avere a disposizione dati sperimentali, in maniera tale da regolare i prototipi virtuali per poter studiare in dettaglio questi fenomeni di vibrazioni.
1.2 Scopo della Tesi
Nella presente tesi si realizzano sei modelli ADAMS per lo studio della dinamica di carrelli aeronautici, utilizzando come riferimento dati sperimentali sui drop test effettuati su questi carrelli e risultati ottenuti con un codice FORTRAN, denominato DYSI, sviluppato presso il (DIA), sempre per la simulazione dei drop test dei suddetti carrelli [3]. Vengono considerate due architetture di carrelli tipiche di un velivolo da trasporto con massa dell’ ordine di 20000 kg con carrelli in fusoliera, una a gamba telescopica ed un’ altra a ginocchio.
Per ognuna di esse si costruiscono modelli rigidi ed elastici, in maniera tale da avere un approccio al problema con un aumento graduale e controllato nella complessità dei modelli.
Tutti gli schemi simulano i drop test delle due architetture considerate, in modo da avere risultati che possono essere confrontati con quelli sperimentali di riferimento: in pratica si costruisce in ambiente ADAMS una macchina virtuale per effettuare i drop test.
I drop test sono tipiche verifiche aeronautiche usate in ambito certificativo per accertare la conformità dei carrelli alle norme in vigore (FAR25).
Il congegno per effettuare i drop test è costituito da un basamento con due colonne metalliche alle quali è vincolata, con due coppie prismatiche, la struttura di collegamento del carrello alla macchina.
Su di essa è disposta la massa di prova che rappresenta la porzione di MTOW (Maximum Take Off Weight) del velivolo che compete al carrello, strumentato in maniera tale da poter misurare tutte le grandezze d’ interesse.
All’ interfaccia per il collegamento del carrello alla macchina, è collegato un martinetto pneumatico che simula la forza di portanza dell’ aereo, uguale e opposta alla forza peso, e che consente di realizzare prove di caduta con velocità costante.
Il carrello è dotato dunque di una velocità di caduta costante, impatta su una tavola vincolata in direzione longitudinale e labile in quella laterale, in maniera tale da poter misurare solo le forze longitudinali che nascono nella zona di contatto tra il pneumatico e la tavola.
11
Le ruote sono messe in prerotazione con una velocità angolare negativa per simulare la velocità longitudinale dell’ aereo.
Delle due architetture considerate, non sono disponibili dati di dettaglio inerenti le geometrie delle diverse parti che compongono i carrelli, ma si conosce solo la posizione di alcuni punti notevoli che definiscono i punti di collegamento del carrello all’ aereo, la lunghezza dei diversi componenti, la posizione della ruote e degli ammortizzatori.
Sono note anche le masse e l’ inerzia delle ruote e di alcune parti della struttura, la forza elastica dell’ ammortizzatore in funzione dello schiacciamento, il valore del coefficiente di laminazione in funzione della velocità e dello schiacciamento, la forza di reazione dei pneumatici per diversi valori dello schiacciamento, il valore della massa di caduta.
Nel presente lavoro, con riferimento ai dati sperimentali disponibili, si descrive la dinamica longitudinale dei carrelli in questione attraverso l’ uso di modelli ADAMS rigidi ed elastici. Negli schemi rigidi oltre ad usare modelli ruota semplici, la massa delle ruote è applicata nel baricentro delle stesse, la massa di caduta è applicata nel baricentro della parte di collegamento tra il carrello e la macchina virtuale per effettuare i drop test, mentre tutti gli altri componenti sono considerati senza massa.
Nei modelli elastici la flessibilità della struttura è simulata in due modi: nel primo si usano molle di rigidezza opportuna, collocate in punti particolari del carrello, nel secondo si usano i corpi elastici (modelli “full-elastic”).
I modelli con molle sono fondamentalmente uguali a quelli rigidi; l’ unica differenza è rappresentata dalla presenza delle molle e dall’ uso di modelli ruota più complessi, usati per descrivere meglio le forze che nascono nella zona di contatto tra il pneumatico ed il suolo. Nei modelli full-elastic si usano gli stessi modelli ruota di quelli con molle.
Inoltre, nei modelli full elastic, a causa della mancanza di dati di dettaglio sulle dimensioni dei diversi componenti che costituiscono il carrello, si calcolano le grandezze non note mediante le rigidezze delle molle dei precedenti modelli elastici.
In pratica si usa il principio dei lavori virtuali per ricavare le relazioni che intercorrono tra le geometrie dei vari componenti e la loro rigidezza, quindi una volta note queste ultime si risale, mediante le precedenti relazioni, alle dimensioni geometriche non note.
I modelli rigidi si usano sia per effettuare un confronto con il software DYSI, già usato in sede di certificazione per simulare i drop test delle due architetture in questione, sia perché, mancando in questi modelli alcuni parametri che descrivono la dinamica dei carrelli, si riesce ad effettuare una messa a punto dei modelli in maniera più semplice.
Questi modelli, nei quali è assente l’ elasticità della struttura, sono utili per capire quale sia l’ influenza degli altri parametri in gioco nello studio della dinamica dei carrelli.
I modelli elastici si usano per approfondire, in maniera qualitativa, la conoscenza delle relazioni che intercorrono tra la dinamica delle parti che costituiscono i carrelli e i carichi stessi, attraverso un confronto con i dati sperimentali.
Inoltre, con i modelli full elastic, una volta terminata la regolazione di questi ultimi, si ricavano delle approssimazioni delle frequenze e di possibili modi propri di vibrare delle strutture.
Nel presente lavoro si considera solo la dinamica longitudinale del carrello, sia perché si hanno dati sperimentali che descrivono solo questa, sia per la mancanza di informazioni sulle geometrie dei carrelli.
In particolare si vuole verificare l’ attendibilità di ADAMS nello studio della dinamica dei sistemi in questione.
12
1.3 Struttura della Tesi
La tesi è suddivisa in cinque capitoli.
Dopo una breve introduzione fatta nel Cap.1, vengono descritti in dettaglio i metodi usati per realizzare i sei modelli ADAMS ed i risultati ottenuti mediante ciascuno di essi.
Nel Cap.2 sono definiti i due modelli rigidi, rispettivamente del carrello a gamba telescopica e di quello a ginocchio, ed è inoltre riportato il confronto con i risultati forniti dal codice DYSI.
Il confronto tra i risultati dei due modelli rigidi con i dati sperimentali è contenuto nel Cap.3.
Nel Cap.4 si introduce l’ elasticità strutturale nei modelli del carrello a gamba telescopica. L’ elasticità è simulata inserendo prima molle di rigidezza opportuna nei precedenti schemi rigidi e usando modelli delle ruote più complessi rispetto a quelli definiti nel Cap.2, poi costruendo un modello con tutti i corpi elastici, sfruttando informazioni ricavate dal modello con molle per calcolare alcune grandezze geometriche che non sono note.
I risultati di questi modelli sono confrontati con i dati sperimentali e con quelli rigidi ricavati nel Cap.2.
Il Cap.5 contiene i modelli elastici del carrello a ginocchio realizzati con un procedimento simile a quello descritto nel Cap.4, e cioè inserendo prima molle di rigidezza opportuna in punti particolari della struttura e poi costruendo un modello con tutti i corpi elastici.
Anche in questo capitolo si confrontano i risultati ottenuti con quelli sperimentali e quelli del Cap.2 inerenti l’ architettura considerata.