Dati sperimentali
6.1 Acquisizioni
Come gia anticipato nel capitolo introduttivo, nella prima parte di questo lavoro, sostanzialmente, sono state apportate alcune modifiche ad un sistema utilizzato nell’ambito di una tesi precedente.
La precedente configurazione prevedeva l’utilizzo di una telecamera digitale (1280 x 960 pixel), con un comune obbiettivo da 12”, e di un video proiettore multimediale (800 x 600 pixel), mentre quella nuova presenta in più una seconda telecamera con le stesse caratteristiche della prima e obbiettivi da misura da 12” su entrambe le telecamere (Figura 6.1).
6.DATI SPERIMENTALI
Per valutare la bontà e i benefici dei cambiamenti introdotti, sono state effettuate alcune prove in laboratorio, confrontando i risultati ottenuti nella ricostruzione di un piano di dimensioni 1000 x 1000, rilevato con un’unica scansione ad una distanza di 1800 mm (area di misura 1000×800 mm2). Le nuvole di punti ottenute sono state utilizzate per definire i piani dei minimi quadrati e l’analisi delle deviazioni dei punti ricostruiti da questi piani ha fornito le seguenti indicazioni: nel caso della vecchia configurazione è stata misurata una deviazione massima di 1.25mm (Figura 6.2)e un errore medio compreso tra ±0.5mm (Figura 6.3), nel caso invece del sistema modificato, la deviazione massima è passata 0.37mm (Figura 6.4), mentre l’errore medio a passato a soli ±0.2mm (Figura 6.5).
Figura 6.2. Rappresentazione degli scostamenti della nuvola di punti dal piano dei minimi quadrati, nel caso della configurazione del sistema con una sola telecamera.
Figura 6.4. Rappresentazione degli scostamenti della nuvola di punti dal piano dei minimi quadrati, nel caso della configurazione del sistema con due telecamere, e gli obbiettivi da misura.
Figura 6.5. Istogramma delle deviazioni, riferito alla Figura 6.4.
L’analisi di questi dati ha inoltre confermato che la causa principale degli errori commessi con il vecchio sistema, era legata alla distorsione introdotta dall’ottica del proiettore, infatti, come si può notare dalla gradazione dei colori in Figura 6.2 il piano ricostruito assume una forma concava, sensazione confermata dall’analisi dell’istogramma relativo in cui si riscontra una gobba dalla parte dei valori negativi.
6.DATI SPERIMENTALI
6.2 Allineamento
Riguardo questo argomento sono state effettuate delle prove eseguendo un singolo allineamento con due tipologie di markers e variandone la disposizione.
Sono stati utilizzati dei marker adesivi di forma quadrata di dimensioni pari a 50x50mm, recanti al loro interno una scacchiera stampata. Nel primo tipo la scacchiera è formata da quadrati bianchi e grigi, nel secondo invece i quadrati sono bianchi e neri, però questi ultimi sono sfumati a partire dagli spigoli verso il centro (Figura 6.6). La sfumatura è stata introdotta per agevolare il software nella fase di estrazione dei punti, in quanto, come per la fase di calibrazione, questa avviene cercando la massima variazione di livello di grigio in prossimità degli spigoli stessi.
Figura 6.6. Rappresentazione delle due tipologie di marker utilizzati.
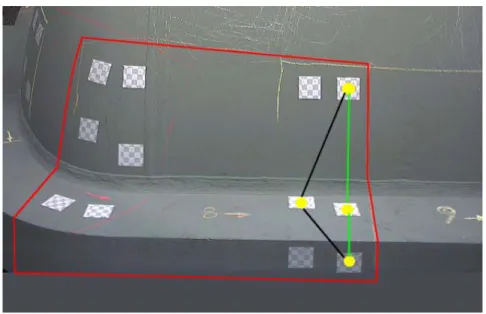
In Figura 6.7 si possono vedere le disposizioni dei marker, la prima prevede di sistemarli allineati in prossimità del bordo della patch, mentre la seconda, di disporli in modo che formino un triangolo. Ritenendo poco significativo riportare i risultati di tutte le prove fatte, vengono invece riportati di seguito solo i dati che si riferiscono al confronto tra i due casi estremi, ossia, tre marker allineati del primo tipo e tre marker disposti a triangolo del secondo tipo. La rappresentazione grafica riportata in Figura 6.8, rende molto bene l’idea dei miglioramenti apportati con l’introduzione dei nuovi marker e della nuova disposizione, è infatti chiaramente visibile come nel secondo caso la zona di sovrapposizione coincida perfettamente.
Figura 6.7. Rappresentazione della disposizione dei marker nelle due configurazioni analizzate: verde allineati, nero a triangolo
Figura 6.8. L’immagine di destra rappresenta la zona di sovrapposizione tra due scansioni adiacenti, allineate con tre marker del primo tipo allineati, mentre quella di sinistra si riferisce all’allineamento effettuato con i marker del secondo tipo disposti a triangolo.
6.3 Rilievo di una cassa completa
A completamento della attività svolta sono stati effettuati i rilievi completi di due semicasse senza maniche: la prima di piccole dimensioni con raggio della virola di 1300mm, lunghezza di 4400mm e larghezza 3400mm, mentre la seconda di dimensioni medie con raggio della virola di 1600mm, lunghezza 5000mm e larghezza 4000mm.
6.DATI SPERIMENTALI
Nel primo caso è stato necessario effettuare 52 scansioni, impiegando circa 6h, mentre nel secondo caso le scansioni sono state 108 con un tempo di esecuzione di circa 12h. In entrambi i casi è stata poi eseguita la procedura di allineamento delle nuvole di punti che ha consentito di ottenere il modello digitalizzato completo delle semicasse come mostrato in Figura 6.1.
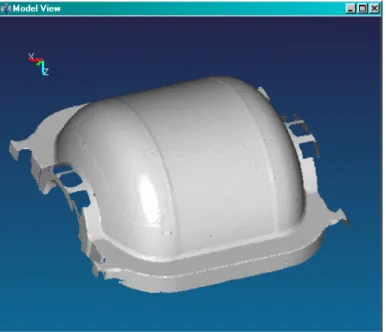
Figura 6.9. Nuvola di punti rappresentativa del modello tridimensionale ricostruito.
Figura 6.10. Modello ricostruito della semicassa senza maniche: rappresentazione in formato STL.
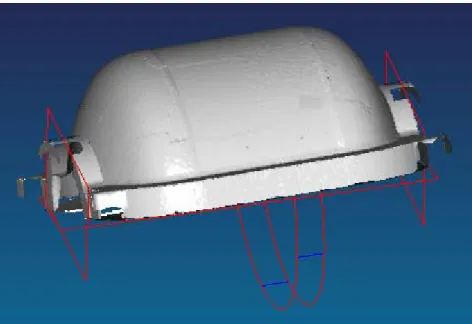
Si è passati poi all’elaborazione di queste nuvole di punti, andando a determinare delle entità geometriche di best-fit, come, ad esempio, piani, cilindri, assi e cerchi
hanno consentito di generare un sistema di riferimento principale, rispetto al quale siamo andati poi a calcolare le grandezze richieste dal piano di collaudo.
Figura 6.11. Esempio di alcune entità geometriche ricavate dalla nuvola di punti
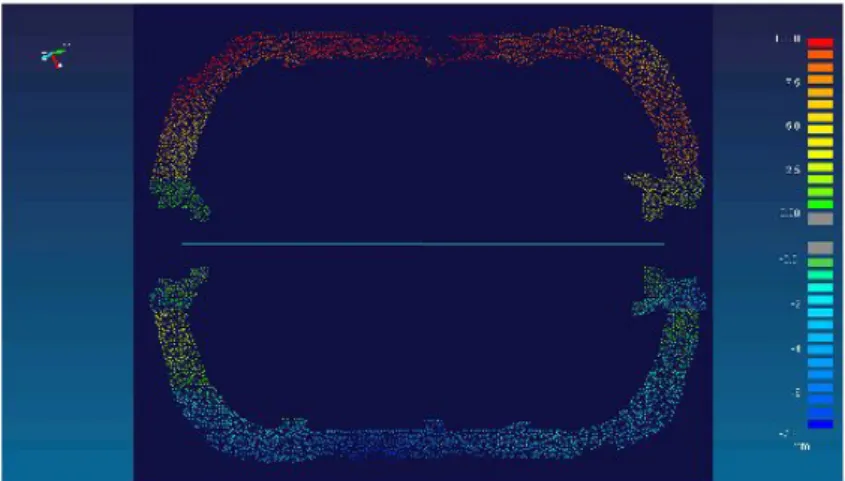
Ritenendo poco significativo riportare una serie di numeri riferiti alle grandezza misurate, e confrontate con i valori forniti dall’azienda, vengono fatte qui di seguito, alcune considerazioni di tipo qualitativo sui risultati ottenuti. La tecnica di ricostruzione proposta, consente di ottenere una notevole precisione dei dati, infatti, le dimensioni rilevate si discostano solo di qualche millimetro da quelle misurate con la stazione di misura, la notevole quantità di punti rilevati consente, ad esempio, di effettuare un analisi molto approfondita della planarità del piano di accoppiamento e avere immediatamente una visione generale degli errori e delle operazioni di aggiustaggio da effettuare (Figura 6.12). Come si può invece notare nella Figura 6.13, sono stati valutati gli scostamenti delle superfici interne degli anelli statorici, rispetto ad un cilindro di best-fit coassiale con l’asse cassa ideale. La precisione dei dati ottenuta potrebbe consentire addirittura di utilizzare il modello digitalizzato direttamente in fase di pianificazione delle lavorazioni alle macchine utensili.
6.DATI SPERIMENTALI
Figura 6.12. Deviazione della nuvola di punti della faccia interna del marciapiede rispetto al piano di accoppiamento ideale.
Figura 6.13. Deviazione della nuvola di punti delle facce interne degli anelli statorici, rispetto al cilindro di best-fit coassiale all’asse cassa ideale.