CAPITOLO 2
FILTRO ANTI-ALIASING
2.1 INTRODUZIONE
Nel Capitolo 1 è stata fissata una frequenza di campionamento f in c
fase di registrazione pari a 200 Ksample/sec. L’idrofono CRT C303 ha una banda in ingresso B di 350 kHz. Affinché i campioni del segnale possano essere utilizzati in modo efficiente per ricostruire il segnale analogico di partenza, per il teorema di Shannon (paragrafo 1.2) deve valere fc ≥2B. Se tale condizione non è soddisfatta, come in questo caso, i campioni ottenuti corrisponderanno ad una versione distorta del segnale iniziale, ovvero corrisponderanno al segnale affetto da aliasing.
Quindi, con un filtro anti-aliasing che limiti la banda del segnale in ingresso ad un valore B' tale che fc ≥2B', si otterranno dei campioni che corrisponderanno al segnale in ingresso limitato alla banda B', eliminando il fenomeno dell’aliasing. In particolare, per la frequenza di campionamento di 200 Ksample/sec, dovrà essere B' 100= kHz.
2.2 TEOREMA DI SHANNON [12]
Il teorema di Shannon (o di Nyquist) fornisce la condizione necessaria affinché un segnale, dopo il campionamento, possa nuovamente essere trasformato in analogico, tramite un convertitore D/A, riottenendo il segnale di partenza. Tale condizione è:
max
2
c
dove fmax rappresenta la frequenza massima contenuta nel segnale, ed è anche conosciuta come frequenza di Nyquist, mentre fc è la frequenza di
campionamento.
In generale lo spettro di una sequenza ottenuta per campionamento si ricava come periodicizzazione dello spettro del segnale analogico di partenza (figura 2.1 a sinistra), con un periodo di ripetizione in frequenza pari alla frequenza di campionamento. Se però la frequenza di campionamento è tale che le varie repliche dello spettro centrate sui suoi multipli vengono a sovrapporsi (figura 2.1 a destra), allora, queste repliche interferiscono tra di loro sommandosi e generando l'errore di aliasing e quindi la distorsione del segnale campionato.
Figura 2.1 – Generico spettro del segnale analogico iniziale (sinistra) e spettro del segnale campionato a frequenza di campionamento minore della banda del segnale iniziale (destra).
Se invece viene rispettata la condizione di Nyquist le diverse repliche dello spettro non si sovrappongono (figura 2.2), consentendo di riprodurre il segnale senza distorsioni.
La frequenza limite utilizzabile per evitare aliasing è quella di Nyquist:
2
c N
f f =
Un'altra possibilità per evitare aliasing si presenta quando abbiamo a che fare con segnali a banda B limitata: in questo caso la condizione da rispettare sarà la seguente:
2
c
f ≥ B
2.3 SCELTA DEL FILTRO DA UTILIZZARE
Sono state effettuate delle prove sulla scheda di acquisizione mantenendo costante la frequenza di campionamento e facendo variare il segnale da acquisire. Il segnale acquisito veniva visualizzato sull’analizzatore di spettro integrato nel programma WAVE.VI (paragrafo 3.3) notando che, aumentando la frequenza del segnale, l’armonica fondamentale andava scomparendo ma progressivamente apparivano le armoniche superiori, ovvero il fenomeno dell’aliasing.
Le prove hanno evidenziato il fatto che nella scheda di acquisizione DAC_CARD 6062E della NATIONAL non sia integrato un filtro anti-aliasing accordabile con la frequenza di campionamento.
Come già anticipato nell’introduzione di questo capitolo, se limitiamo la banda del segnale in ingresso alla scheda d’acquisizione ad un valore B'
tale che fc ≥ 2B', il segnale campionato avrà uno spettro costituito da repliche dello spettro del segnale di partenza (a banda B') come accade in figura 2.2.
Di fatto il filtro anti-aliasing, che verrà posto in cascata all’idrofono, si realizza tramite un filtro passa-banda. In questo modo si eliminano dal segnale le frequenze più alte, cioè quelle superiori alla frequenza di Nyquist (100 kHz), che provocano aliasing, oltre alle frequenze sotto i 480 Hz, responsabili di vari disturbi rumorosi, tra cui il motore della barca. Chiaramente i tagli effettuati dal filtro devono essere tali da non ridurre eccessivamente la qualità del segnale stesso.
Per quanto riguarda la parte passa-basso del filtro, si è scelto di realizzarla con un filtro di Butterworth del quarto ordine, in modo da avere una selettività sufficiente ai nostri scopi. Infatti con un filtro di questo tipo il fronte di discesa sarà di -80 dB/dec. La parte passa-alto invece non necessita di una eccessiva selettività, in quanto limita solamente del rumore; quindi sarà sufficiente un filtro passivo del primo ordine. Questo causerà però una certa attenuazione del segnale, quindi anche per questo motivo il filtro passa-basso sarà un filtro attivo con un’adeguata amplificazione a centro banda.
Per poter effettuare una progettazione delle due parti del filtro, è necessario introdurre dei concetti sulle funzioni biquadratiche, sui polinomi di Butterworth e sui filtri di Butterworth.
2.4 FUNZIONI BIQUADRATICHE [1]
In figura 2.3 sono rappresentate delle risposte di un filtro ideale: (a) passa-basso, (b) passa-banda, (c) passa-alto e (d) elimina-banda. Si possono realizzare delle approssimazioni di tali risposte tramite la progettazione di filtri reali. Per cominciare, tali approssimazioni dovranno essere espresse in forma matematica. La funzione di trasferimento ( )H s può essere scritta in forma generale come:
( ) ( ) ( ) A s H s B s = (2.1)
dove ( )A s e ( )B s sono polinomi nella variabile s . Ovviamente, per avere stabilità, gli zeri di ( )B s devono giacere nel semipiano negativo mentre non vi è alcuna restrizione per gli zeri di ( )A s [1].
H(j2πf) H(j2πf) H(j2πf) H(j2πf) 0 H 0 H 0 H 0 H H f L f 1 f 1 f 2 f 2 f 0 0 0 0 f f f f ( )a ( )b ( )c ( )d
Figura 2.3 – Filtro ideale passa-basso(a), passa-banda(b), passa-alto(c) e elimina-banda(d).
In ogni caso, si suppone che il numero di poli di ( )H s sia finito e maggiore o uguale al numero degli zeri.
Si supponga ( )H s del tipo:
2 2 1 2 1 0 ( ) a s a s a H s 0 s b s b + + = + + (2.2)
La (2.2) è detta funzione biquadratica poiché sia il numeratore che il denominatore sono polinomi di secondo grado in s [1]. Tutte e quattro le risposte di figura 2.3 possono essere approssimate con un’opportuna scelta dei coefficienti della (2.2).
In particolare, per la funzione passa-basso si ottiene la forma
2 0 0 ( ) ( ) K H s s
ω
Q sω
2 = + + (2.3)che può essere riscritta come
0 2 2 0 0 ( ) ( ) (1 )( ) H H s s
ω
Q sω
= 1 + + (2.4) dove 2 0H =K
ω
0 . La (2.4) ha la stessa forma della risposta vista per un amplificatore con due poli in reazione [1]. La risposta in frequenza relativa a questa funzione varia al variare del fattore di smorzamento k =1 2Q. Tuttavia, la funzione a due poli non fornisce molta attenuazione alla pulsazione sω
0 =2. Ad esempio, per , in modo da minimizzare la sovrelongazione nella risposta temporale, l’attenuazione per0.6
k >
0 2
s
ω
= èminore di 14 dB e fornisce una selettività insufficiente per la maggior parte delle applicazioni, compresa la nostra. In genere si ricorre a funzioni di ordine superiore per ottenere i livelli tipici di attenuazione richiesti nella pratica [1].
2.5 POLINOMI DI BUTTERWORTH [1]
I polinomi di Butterworth sono comunemente usati per realizzare un’approssimazione con soli poli della caratteristica di tipo passa-basso. Si
pone H s( )=H B s0 ( ), dove ( )B s è un polinomio di Butterworth il cui modulo è dato da 2 2 0 ( ) 1 n B
ω
ω
ω
⎛ ⎞ = + ⎜ ⎟ ⎝ ⎠ (2.5)Maggiore è il valore di , più la curva approssima la risposta ideale della figura 2.3 (a). Con i filtri di Butterworth non vi è ondulazione nella banda passante e la risposta è sostanzialmente costante per
n
0
ω ω
< . I polinomi di Butterworth fanno parte di una classe di filtri a risposta massimamentepiatta per i quali le prime n-1 derivate di (H j
ω
), calcolate in zero, sono nulle [1].I coefficienti dei polinomi di Butterworth B s per n fino a 8 si n( ) trovano tabellati, ed in particolare per n=4 e
ω
0 = rad/s si ha: 12 2
4( ) ( 0.765 1)( 1.848 1)
B s = s + s+ s + s+ (2.6)
In generale, per n pari i polinomi sono ottenuti come prodotto di fattori quadratici che hanno la stessa forma del denominatore della (2.4), quindi per ottenere un filtro di Butterworth del quarto ordine basterà porre in cascata due filtri del secondo ordine aventi ognuno risposta in frequenza del tipo (2.4), rispettando i coefficienti che compaiono nella (2.6). Una proprietà interessante dei filtri di Butterworth è che le loro radici stanno tutte su un cerchio di raggio unitario [1].
2.6 FILTRO
PASSA-BASSO
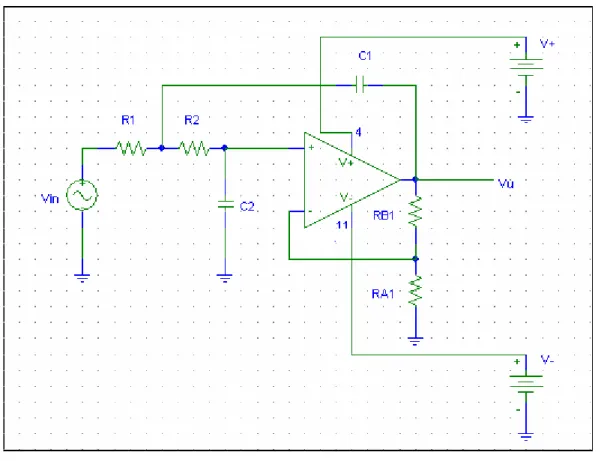
Per ottenere una funzione di trasferimento del tipo (2.4) si può usare una cella passa-basso di Sallen e Key [1], come quella in figura 2.4.
Figura 2.4 – Cella passa-basso di Sallen e Key.
La funzione di trasferimento di questo circuito può essere espressa come
2 1 2 1 2 2 1 2 1 1 ( ) [ ( ) (1 )] 1 v v A H s R R C C s s C R R R C A = + + + − + (2.7)
dove Av = +1 R Rb a è il guadagno dell’amplificatore. Confrontando la (2.7) con la funzione passa-basso della (2.4) si ottiene:
0 1 2 1 2 1 R R C C
ω
= 1 2 1 2 1 1(1 v) 2( 1 2) R R C C Q R C A C R R = − + + (2.8)Per semplificare la realizzazione si può scegliere C1=C2 =C. A questo punto, per la progettazione di due celle in cascata che, insieme, realizzino una funzione di trasferimento totale con denominatore pari alla (2.6), dalla (2.6) e dal denominatore della (2.4) per
ω
0 = rad/s, si ricava che: 11
0.765 1 Q= (2.9)
2
1.848 1 Q=
Ricordando poi che la frequenza di taglio deve essere di 100 kHz, ponendo ad esempio R1=47 KΩ, R2 =5.6 KΩ e C =100 pF, si ottiene
0 1 2 1 100 2 f R R C
π
= ≅ kHzA questo punto dai valori di Q1 e Q2 si ricavano
1 1.855 v A = 2 1.481 v A = Da queste 1 1 0.855 b a R R = 2 2 0.481 b a R R =
Basandosi poi su quelli che sono i valori standard per le resistenze che si trovano comunemente in commercio [2], si giunge alle seguenti scelte:
1 1 33 0.846 39 b a R K R K Ω = = Ω 2 2 27 0.482 56 b a R K R K Ω = = Ω (2.10) Quindi si ottengono 1 1.846 reale v A = 2 1.482 reale v A =
Infine, per quanto riguarda la scelta dell’amplificatore operazionale, il parametro da tenere maggiormente in considerazione è il prodotto guadagno-banda (GBW). Infatti è necessario rispettare la disequazione
1 2 max
10 v v
GBW ≥ A A f
Per una fmax di 200 kHz si ottiene
5.5
GBW ≥ MHz
E’ stato quindi scelto l’amplificatore operazionale LM833N che ha GBW=15 MHz, tensione di alimentazione minima di 2.5V e massima di 18V. Quindi lo schema del filtro passa-basso totale sarà quello di figura 2.5.
Figura 2.5 – Filtro passa-basso, costituito da un filtro di Butterworth del quarto ordine, realizzato con due celle di Sallen e Key in cascata, dimensionate secondo le nostre specifiche.
2.7 FILTRO
PASSA-ALTO
Il più banale dei filtri passa-alto consiste in una squadra RC, come in figura 2.6. Dal circuito si ricava
1 1 u S S S i S S S V R R C V R R C s = = + + S s C s (2.11)
Per cui il polo risulta essere 0 1 2 S S f R C
π
= . Scegliendo RS =1KΩ e si ottiene una 330 SC = nF f0 di circa 482 Hz. In questo modo si tagliano le frequenze dalla continua fino a f . Il filtro dimensionato è riportato in figura 0
2.7.
2.8 FILTRO
TOTALE
Per ottenere un filtro passa-banda con f1 ≅482Hz e f2 ≅100kHz, si devono mettere in cascata il filtro alto (squadra RC) ed il filtro passa-basso (Butterworth del quarto ordine). Per rendere indipendenti i due sistemi in cascata per quanto riguarda le resistenze viste (in uscita al passa-alto ed in ingresso al passa-basso) si pone tra i due un buffer. Il buffer infatti ha come caratteristiche e . Per l’amplificatore operazionale nel
buffer possiamo utilizzare lo stesso modello presente nel filtro passa-basso, e
cioè l’LM833N. Quindi lo schema finale dell’intero filtro è riportato in figura 2.8.
in
R → +∞ Rout →0
Figura 2.8 – Filtro banda finale, con funzione sia di filtro anti-aliasing che di passa-alto che elimina il rumore del motore della barca.
In figura 2.9 è riportata la risposta in frequenza del filtro di figura 2.8. Il grafico raggiunge il polo del filtro passa-alto (482 Hz) con un fronte di salita di +20dB/dec, mentre scende dai quattro poli del filtro passa-basso (posizionati tutti a 100 kHz) con pendenza -80dB/dec.
Figura 2.9 – Risposta in frequenza del filtro in figura 2.8, ottenuta tramite simulazione.
2.9 PROGETTO DEL FILTRO ANTI-ALIASING
ACCORDABILE
Considerando che la scheda di acquisizione DAQCard-6062E nel caso di acquisizione singola ha una frequenza massima di campionamento pari a 500 Ksample/sec, si può ragionevolmente pensare di sfruttarne maggiormente le prestazioni acquisendo segnali con banda più larga di 100 kHz. In particolare, l’amplificatore di carica che viene utilizzato con l’idrofono in ceramica possiede una banda di 180 kHz, quindi dimensionando correttamente il buffer allocato in memoria (si riveda il paragrafo 1.3) si può pensare di utilizzare l’idrofono CRT C303 con un F.A.A. con frequenza di taglio superiore pari a circa 180 kHz, in modo da rendere i due sistemi equivalenti da questo punto di vista. Per una frequenza di taglio superiore di 100 kHz si possono utilizzare i seguenti valori:
1 2 47 5.6 100 R K R K C p = Ω = Ω = F
Mantenendo inalterati i valori di R1 e R2, per C=56pF si ottiene:
1 2 1 175.2 2 o f kHz C R R
π
= ≅Dalla (2.8), avendo posto anche in questo caso C1=C2 =C, si ricava
1 2 1 2 1 (1 v) ( 1 2) 1(1 v) C R R R R Q 1 2 R C A C R R R A R R = = − + + − + +
Quindi Q non dipende da C, di conseguenza e non dipendono da C. Questo implica che
1 Q Q2 1 b R , 1 a R , 2 b R e 2 a
R mantengono gli stessi valori trovati
nelle (2.10), dato che
1 v A e 2 v A restano uguali.
Si può allora pensare di realizzare un filtro anti-aliasing con frequenza di taglio superiore accordabile, ponendo nello schema di figura 2.8 al posto dei quattro condensatori C, quattro strutture come quella in figura 2.10.
Il commutatore deve essere pilotato da una manopola esterna manuale, che permette di scegliere una f di 100 kHz (commutatore nella posizione 1) o di 0
180 kHz (commutatore nella posizione 2).
Dato che nel corso di questa tesi verranno effettuate solo registrazioni con frequenza di campionamento di 200 Ksample/sec, è stato realizzato solamente il filtro con frequenza di taglio superiore di 100 kHz, ma non si esclude in futuro di arrivare a registrare correttamente con frequenza di campionamento di 360 Ksample/sec.
Figura 2.10 – Schema con due condensatori in parallelo con commutatore in ingresso.
2.10 MONTAGGIO E TEST DEL FILTRO
Il filtro analogico è stato realizzato su una scheda 1000 fori con resistenze da 1 2 Watt, ponendo gli amplificatori operazionali LM833N su un’opportuna basetta, evitando cosi di intervenire sugli amplificatori stessi con le saldature. Successivamente è stato verificato che la risposta in frequenza del filtro fosse effettivamente equivalente a quella riportata in figura 2.9. Per eseguire questa prova si è utilizzato un oscilloscopio, un alimentatore bipolare da ±18V, un generatore di rumore da un massimo di 50 kHz ed un generatore di forme d’onda da un massimo di 2 MHz. Col generatore di rumore si è verificata la risposta del filtro nei primi 50 kHz, osservando quindi il primo polo a circa 480 Hz. Successivamente, non disponendo di un generatore di rumore per frequenze superiori, si è generata una sinusoide variandone la frequenza da 10 a 270 kHz. Ponendo in ingresso al filtro tale sinusoide ed osservando, per ogni frequenza (con passo di 10 kHz), l’ampiezza della conseguente sinusoide in uscita, è stata ricavata una risposta del filtro per punti. In questo modo si è verificato l’effetto degli altri
4 poli a circa 100 kHz. Si è inoltre verificato che il filtro fosse effettivamente a banda sufficientemente piatta.
-25 -20 -15 -10 -5 0 5 10 10 100 1000 Data 1 Ampiezze(dB) A m pi ezz e (d B ) Frequenze(kHz)
Figura 2.11 – Risposta del filtro ottenuta per punti osservando l’ampiezza della sinusoide in uscita con sinusoide in ingresso variabile da 10 a 270 kHz.
In figura 2.11 è rappresentato in scala logaritmica il risultato delle prove col generatore di segnale. L’alimentazione tipica che compare nelle figure 2.5-2.8 di ±9V, assicura un corretto funzionamento del filtro per tensioni di ingresso fino a ±3V. Imponendo infatti in ingresso una sinusoide di ampiezza maggiore, l’uscita risulta “tagliata” oltre un certo valore di ampiezza, ovvero il sistema satura. Dalle specifiche dell’idrofono CRT C303 si evince una tensione massima in uscita di circa ±5V, quindi per il corretto funzionamento
del nostro sistema di acquisizione si è dovuta aumentare la tensione di alimentazione fino al valore di ±15V, che assicura di non distorcere il segnale in uscita dal filtro per ingressi fino a ±5.1V. La prova riportata in figura 2.11 è quindi stata effettuata con tensione di alimentazione di ±15V e con ingresso pari ad una sinusoide di ampiezza ±1V.