9
Capitolo 2
Materiali e metodi
Il cammino è uno dei movimenti più difficili e complessi da eseguire: lo si impara durante l’infanzia, ed una volta imparato viene eseguito inconsciamente. Solo però dopo aver perso la possibilità di svolgerlo autonomamente se ne capisce l’importanza: la perdita o la diminuzione della capacità di camminare rende infatti difficile, se non impossibile, svolgere molte attività di vita quotidiana, provocando un’insoddisfazione generale nel soggetto [28].
Migliorare la mobilità in soggetti con problemi di deambulazione porta ad un miglioramento notevole della loro qualità della vita e, di conseguenza, del loro stato di salute. Per questo, nel corso degli anni sono stati effettuati numerosi studi che hanno proposto metodi riabilitativi ottimali per tali soggetti.
Molti di questi studi sono stati svolti su soggetti con problemi di deambulazione dovuti a patologie come l’ictus o lesioni midollari [29]-[30], ed hanno dimostrato che è possibile ottenere un notevole miglioramento delle abilità residue se la deambulazione viene eseguita con sistemi basati sulla combinazione di un treadmill e di un sistema di allievo del peso (Body Weight Support- BWS) [31].
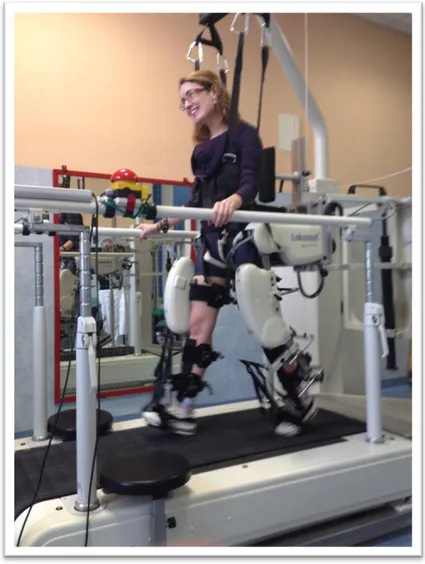
Da questi studi nascono molte delle machine riabilitative usate in riabilitazione degli arti inferiori: tra queste il sistema robotico Lokomat (Driven Gait Othosis (DGO) è il più diffuso (Figura 2.1) e risulta particolarmente adatto per pazienti affetti da lesioni midollari [32], sclerosi multipla [33] e per bambini con paralisi celebrale [34]-[35]. Fino ad oggi, sono stati pubblicati diversi studi sull’utilizzo del sistema Lokomat in soggetti affetti da malattie neurologiche [36]-[37]. Recenti studi sperimentali hanno evidenziato l'attivazione di differenti schemi elettromiografici (EMG) in soggetti sani ed in soggetti con lesione midollare durante l’addestramento al cammino effettuato con sistemi robotici basati su un treadmill.
E’ stata registrata l’attività muscolare negli arti inferiori nei soggetti sani durante la deambulazione assistita dal robot per studiare le differenze di attivazione EMG in diverse condizioni sperimentali, come ad esempio due differenti velocità [38].
10 Il confronto dell’attività EMG tra soggetti SCI e soggetti sani mostra che anche nel caso di soggetti con una lesione completa al midollo spinale , l'adattamento a diverse velocità di locomozione è ancora presente [39].
2.1 Il sistema robotico Lokomat
Il sistema robotico Lokomat (Hocoma AG, Volketswil, Svizzera),(Figura 2.1) è un dispositivo robotico utilizzato nella riabilitazione del cammino. Fa parte dei sistemi esoscheletrici, ed è formato da due DGO e da un treadmill.
Figura 2.1. Il sistema robotico Lokomat.
Il sistema è dotato di quattro gradi di libertà, due per gamba, che consentono all’anca ed al ginocchio di compiere movimenti di flesso estensione nel piano sagittale.
11 E’ costituito da due ortesi robotiche motorizzate - una per lato - che vengono connesse alle gambe del paziente.
Ciascuna ortesi ha integrato in corrispondenza dei giunti di anca e di ginocchio, un attuatore lineare che riesce ad indurre all’arto i movimenti di flessione e di estensione nel piano sagittale.
In corrispondenza dei giunti di anca e di ginocchio, tra l’attuatore e l’ortesi, sono presenti sensori di posizione (encoder) e di forza che consentono di monitorare in tempo reale la posizione dei giunti e le forze in gioco durante la sessione.
E’ inoltre presente sistema passivo a molle finalizzate al sollevamento della pianta del piede che induce una dorsiflessione della caviglia durante la fase di volo (swing).
Di fronte al paziente si trova uno schermo che permette di mostrare al soggetto dei feedback relativi al suo andamento.
L’intero dispositivo è infine dotato di un PC tramite il quale il terapista controlla e regola i vari parametri.
Poiché il sistema Lokomat viene utilizzato da soggetti con caratteristiche differenti tra loro, è stato progettato in modo tale da poter essere regolato sulla base delle caratteristiche anatomiche di ciascun paziente: è infatti possibile modificare diversi parametri in modo tale da permettere all’ortesi di adattarsi perfettamente al soggetto [36] (Figura 2.2).
I parametri che possono essere modificati sono i seguenti: larghezza relativa all’ortosi corrispondente all’anca, lunghezza delle ortosi relative alla coscia ed alla tibia, larghezza della fascia che sostiene il paziente ed il supporto delle gambe.
La larghezza relativa all’ortosi corrispondente all’anca (Figura 2.2, 1), viene regolata con un perno che muove a sua volta le due gambe in modo separato.
La lunghezza delle ortesi relative alla coscia ed alla tibia possono essere regolate in base alle misure antropometriche del paziente (Figura 2.2, 4 e 5).
La fascia che viene fissata intorno al petto del paziente, viene montata su un cuscinetto che può essere mosso e regolato sia in direzione verticale , che orizzontale (Figura 2.2, 2 e 3).
Infine, il supporto delle gambe (Figura 2.2, 8) può essere adattato in base alle dimensioni delle gambe del paziente e può essere messo nella corretta posizione attraverso delle viti (Figura 2.2, 6 e 7).
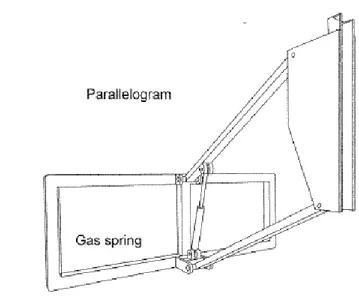
12 Per prevenire abrasioni sulla pelle, le cinghie che si trovano a diretto contatto con il paziente sono realizzate in modo tale da essere morbide e confortevoli, inoltre nelle zone particolarmente sensibili come l’inguine, vengono inserite delle fasce imbottite. Poiché i pazienti che usano il sistema Lokomat hanno solitamente problemi di stabilità del tronco, il dispositivo è stato realizzato in modo tale da avere una struttura simile a quella di un parallelogramma (Figura 2.2 e Figura 2.3 ). I
In questo modo l’unico movimento consentito è quello lungo la direzione verticale: il parallelogramma, controbilanciato da una molla, tiene infatti il paziente in modo stabile in posizione eretta, evitando cosi possibili movimenti indesiderati del tronco.
Figura 2.2. Schema ortosi Lokomat. Figura 2.3. Schema complessivo del dispositivo robotico Lokomat.
Mediante queste soluzioni si ottengono due importanti vantaggi: il primo è che il meccanismo di controllo del DGO è semplice, in quanto il movimento delle gambe deve essere controllato solo nel piano sagittale
Il secondo riguarda il tipo di training che può essere eseguito con il dispositivo: grazie a questa struttura, il terapista può eseguire delle sedute con pazienti tetraplegici, i quali non hanno il controllo della parte superiore del corpo e non riescono a mantenere la posizione eretta.
13 Inoltre, grazie alla presenza della molla a gas montata in corrispondenza del parallelogramma [37] (Figura 2.4), i movimenti lungo l’asse verticale risultano ammortizzati.
Figura 2.4. Molla a gas e struttura a parallelogramma.
Il Lokomat è un dispositivo programmabile: si possono infatti regolare il grado di assistenza che il dispositivo offre al paziente durante la seduta, l’intervallo articolare (Range of Motion,ROM) di anca e di ginocchio, e la velocità alla quale far deambulare il paziente [37].
Dopo aver inserito gli opportuni parametri, e dopo aver imbracato il paziente nell’apposito sistema di cinghie che lo vanno ad avvolgere intorno al petto, alla vita e alle gambe, la seduta può iniziare.
Gli arti inferiori del paziente vengono mossi dal sistema sulla base di traiettorie precedentemente registrate e basate su cicli del passo fisiologici.
I quattro giunti DGO vengono controllati separatamente: per ciascun motore è infatti implementato un controllo di posizione.
Sul PC è possibile andare a impostare i valori di alcuni parametri, tra cui gli angoli ai giunti. In questo modo sul monitor posto di fronte al paziente vengono visualizzate le traiettorie degli angoli di riferimento di anca e di ginocchio e gli andamenti degli angoli relativi ai quattro giunti.
14 Durante la sessione è possibile valutare qualitativamente quanto il paziente riesce a seguire la traiettoria imposta: più è piccolo lo scostamento tra le due traiettorie, maggiore sarà la capacità del paziente di seguire un cammino fisiologico.
E’ importante che il robot “adatti” il proprio comportamento dinamico alle caratteristiche del singolo paziente.
Per fare ciò è presente un secondo loop di controllo, che esegue il controllo di impedenza [38]. Quest’ultimo è uno dei principali tipi di controllo usati in robotica e in tutti quei casi in cui è presente un’interazione del tipo corpo umano-robot e/o ambiente-robot.
L’esecuzione di un compito di deambulazione comporta infatti l’interazione del sistema con l’ambiente che lo circonda e, nella fase di interazione, l’ambiente pone dei vincoli che devono essere seguiti dal robot. In particolare poi quando si parla di interazione corpo umano-robot, i vincoli posti sono molto stringenti per essere sicuri di lavorare in sicurezza.
Uno dei requisiti fondamentali per il successo di un compito di manipolazione è quindi la capacità di gestire l’interazione del robot con l’ambiente. La grandezza che in maniera più significativa riflette lo stato di interazione è la forza di contatto.
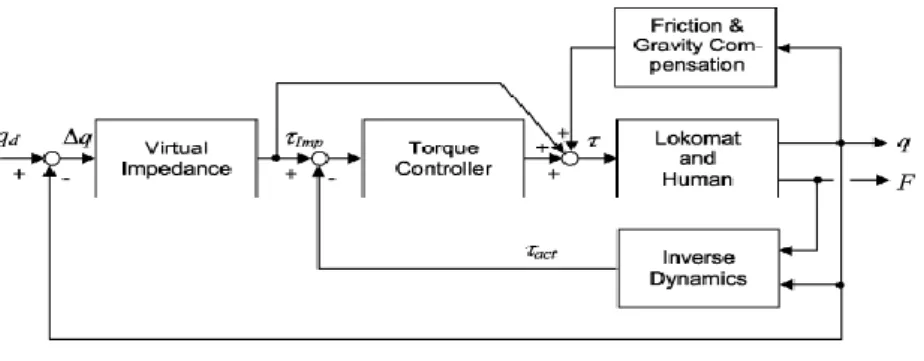
Il controllo di impedenza fu introdotto da Hogan circa 20 anni fa [38], e l’idea che sta alla base di questo tipo di controllo applicato ad un robot per la riabilitazione del cammino, è quella di non imporre un modello rigido del cammino, ma di lasciare una piccola deviazione variabile alla traiettoria predefinita [38]. La quantità di deviazione lasciata dipende dallo sforzo che il paziente compie durante il cammino: grazie ai sensori di forza presenti ai giunti, è infatti possibile rilevare la coppia che il giunto esercita sul sensore. Tramite questi valori, e tramite appositi modelli espressi in funzione dell’andamenti degli angoli ai giunti e delle loro derivate, è possibile risalire poi all’impedenza meccanica: quest’ultima viene infatti definita come la relazione che intercorre tra la coppia che agisce sul giunto e l’angolo compiuto dal giunto stesso. In Figura 2.5, è possibile vedere una possibile versione del controllo di impedenza implementato nello spazio dei giunti, che permette al Lokomat di avere un comportamento tale da seguire la rigidezza degli arti.
15 Figura 2.5. Schema del controllo di impedenza.
Lo schema generale di controllo del DGO Lokomat è mostrato in Figura 2.6. Come si può notare, è costituito da tre parti hardware: il PC “host”, il PC target ed il controllore di corrente.
Per ciascun motore presente è implementato un loop di controllo di posizione (blocco “Position controller”). Quest’ultimo si basa sul controllore di corrente (blocco “Current controller”), che a sua volta si basa sull’uscita del controllore di posizione.
Quest’ultimo è implementato in tempo reale e si trova all’interno del PC target.
16 Gli angoli di ciascun giunto vengono misurati tramite un potenziometro ed il corrispettivo valore viene trasferito in tempo reale tramite un convertitore analogico/digitale. Il PC host ed il PC target comunicano tra di loro attraverso un bus seriale (RS232).
Il terapista durante la seduta controlla il DGO tramite l’interfaccia “User Interface”. La velocità scelta viene quindi trasferita al PC target che modifica il modello del cammino in base ad esso e regola inoltre la velocità del treadmill attraverso una seconda porta seriale.
L’interfaccia utente è programmata in LabView e si trova nel PC host. Poiché deve essere facile, intuitiva e sicura, è stata programmata in modo tale che ogni passo della procedura sia specificato in una sequenza separata e il terapista deve confermare ciascuno passo singolarmente prima di continuare.
Una parte importante dell’interfaccia, è rappresentata dal database. In questo modo è sia possibile aggiungere i dati personali dei singoli pazienti, sia salvare i dati relativi ad ogni singola sessione in modo da valutare l’andamento delle sessioni nel tempo.
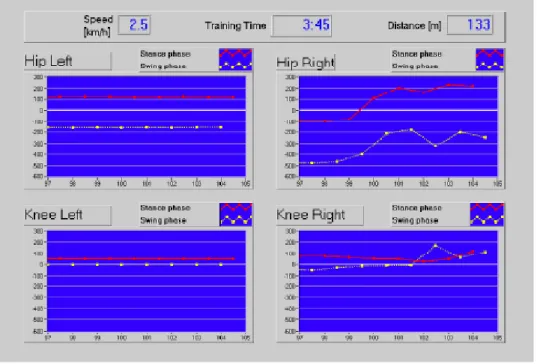
Un'altra interfaccia fondamentale, è quella relativa al feedback. Quest’ultima è quella che viene vista dal paziente durante la sessione, ed è importante perché i valori mostrati (Figura 2.7) possono incoraggiare il soggetto a migliorare i propri movimenti.
17 Su questo tipo di schermata è possibile visualizzare differenti feedback. I valori che vengono mostrati si ottengono attraverso la seguente procedura [38]: il ciclo passo viene diviso in due fasi, quella di swing e quella di stance. Per ciascuna fase vengono poi calcolate le medie ponderate delle forze rilevate ai giunti, ottenendo così due valori per fase e per giunto. In questo modo sono disponibili in tutto otto segnali di biofeedback per ciascuna fase del ciclo del passo e per ciascun giunto. Il valore del feedback Bi,j per
il giunto i e nella fase j può essere quindi espresso come indicato nella formula seguente:
Bi,j
=
( ) ( ) ∫ ( )
dove w è il peso associato alla funzione e F è la forza misurata al giunto. A causa della simmetria bilaterale che caratterizza il corpo umano, vengono utilizzate quattro diverse funzioni peso relative rispettivamente a: hip-stance, hip-swing, stance, e knee-swing. Il peso di queste funzioni viene scelto in modo euristico ed in modo tale da ottenere valori positivi quando il paziente contribuisce attivamente al movimento [38]. Il tutto è implementato nel software presente nel dispositivo robotico Lokomat.
Con questo tipo di training è possibile eseguire la seduta secondo differenti modalità:
1) Modalità “passiva”: al paziente viene chiesto di lasciarsi guidare dal dispositivo e non contribuire al movimento. In questo caso le due traiettorie mostrate sul display saranno parallele e vicine tra loro e quella relativa al movimento del paziente sarà vicina allo zero.
2) Modalità “attiva”: al paziente viene chiesto di contribuire attivamente al movimento. In questo caso le due traiettorie si allontaneranno tra loro e quella relativa al movimento del paziente sarà diversa da zero.
Oltre a questo tipo di feedback, è possibile mostrare al paziente anche altri tipi di feedback: uno è un termometro (Figura 2.8) in cui la colonnina della temperatura si alza in base a quanto il paziente collabora nel movimento. L’altro è rappresentato in figura 2.9 ed è una faccina, uno smile, che sorride man a mano che il paziente contribuisce al movimento.
18
Figura 2.8. Biofeedback “termometro”. Figura 2.9. Biofeedback “smile”.
2.2 Protocollo clinico
Sono stati analizzati 12 soggetti, di cui 7 con mielolesione e 5 sani. Dei soggetti con lesione midollare, quattro erano affetti la sclerosi multipla, uno da lesione da trauma e gli altri due erano affetti da una mielite trasversa e un tumore.
I criteri di inclusione sono i seguenti:
Lesione midollare incompleta di origine non traumatica o traumatica (livello cervicale o toracico)
Evento avvenuto almeno sei mesi prima
Età > 18 anni
Collaborazione del soggetto
Adesione alla sperimentazione
I pazienti reclutati, sono stati valutati attraverso alcune scale di valutazione: l’ ASIA, la scala SCIM e la scala WISCI. Inoltre i soggetti con un'abilità minima di deambulazione sono stati sottoposti ai seguenti test del cammino, prima e dopo il trattamento :
6MWT (6 Minute Walking Test)
TUG (Test Up and Go)
19 Per quanto riguarda invece i criteri di esclusione:
Presenza di altra patologia grave concomitante con la lesione midollare
Paziente con peso corporeo 135 Kg
Paziente con altezza > 200 cm
Dismetria degli arti inferiori >2 cm
Problemi dermatologici in cui l’uso di una ortesi è sconsigliato
Paziente con ridotta capacità cognitiva
Le registrazioni sono state svolte con una media di due volte alla settimana per ciascun paziente, ed in ogni sessione sono stati registrati sia i dati cinematici relativi all’ articolazione dell’anca, sia i dati elettromiografici relativi ai muscoli retto femorale e bicipite femorale, in entrambi i lati.
Sulla base dei risultati delle sperimentazioni precedenti effettuate presso lo stesso Centro [40], il protocollo clinico è stato svolto a due velocità di treadmill ed è stato focalizzato alla valutazione dei muscoli prossimali in quanto sono quelli che maggiormente contribuiscono alla flessione dell’anca .
I 12 soggetti sono stati quindi analizzati in quattro diverse condizioni:
Modalità passiva, con velocità pari ad 1 km/h
Modalità passiva, con velocità pari a 2 km/h
Modalità attiva, con velocità pari ad 1 km/h
Modalità attiva, con velocità pari a 2 km/h
Nella modalità passiva il paziente è invitato a non contribuire alla mobilizzazione dell’anca e del ginocchio imposti dal sistema robotico Lokomat, mentre in quella attiva il soggetto contribuisce al movimento in base alle proprie capacità residue.
Sono state registrate le attività elettromiografiche, tramite l’elettromiografo BTS-FreeEMG300 (BTS-SpA, Italia) per ciascuna condizione, del retto femorale destro e sinistro, e del bicipite femorale retto e sinistro. Inoltre per individuare l’heel strike, ovvero l’istante in cui il tallone tocca terra, sono stati utilizzati due footswitch, uno per il piede destro ed uno nel piede sinistro, posti all’interno delle scarpe.
20 Per quanto riguarda i dati cinematici, questi sono stati registrati tramite il Lokomat stesso, in quanto è possibile impostare i parametri da registrare.
E’ stato quindi deciso di registrare le traiettorie effettuate ed imposte dei giunti di anca destra e sinistra nelle quattro modalità sopra elencate.
Infine è stata eseguita un analisi post-processing, mediante il software Matlab.
2.2.1 Le scale di valutazione utilizzate
2.2.1.1 A.S.I.A.
Nel 1984 l’A.S.I.A. (American Spinal Injury Association) ha pubblicato gli standards per la classificazione neurologica dei pazienti con trauma midollare [40]. La valutazione neurologica attribuiva un punteggio motorio (in una scala da 0 a 5 punti) a 10 gruppi muscolari.
La funzione sensitiva non era quantificata ma era annotato il livello cefalico di sensibilità conservata. Questi standards furono rivisti nel 1989 per fornire una migliore e più specifica determinazione del grado di sensibilità [41]. Ulteriori modifiche furono apportate infine nel 1996 [42],[43] e quest’ultima versione è considerata la scala di valutazione neurologica più affidabile.
Nell’esame neurologico è necessario seguire uno schema preciso. Dopo l’esame dei nervi cranici si procede nella valutazione dell’esame sensitivo, della motilità, dei riflessi e dell’area sacrale.
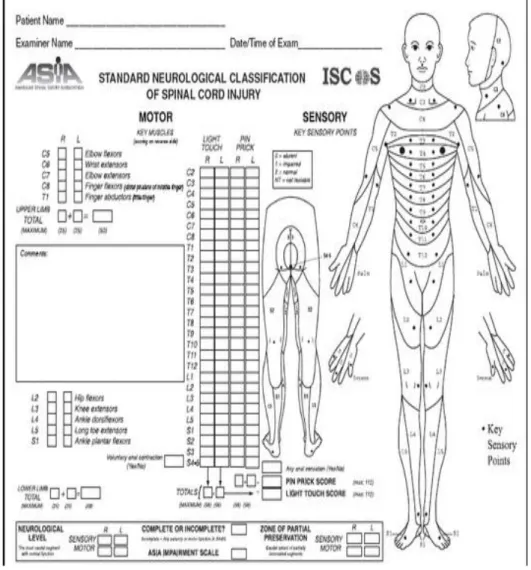
I dati così raccolti con l’esame clinico vengono registrati in una apposita scheda (Figura 2.10) le cui caratteristiche principali sono l’individuazione di alcuni muscoli e di alcuni punti sensitivi chiave sui quali deve essere focalizzata l’attenzione dell’esaminatore. La scheda consente di definire il livello neurologico, la completezza della lesione ed il grado di deficit. Consente quindi di effettuare una prima valutazione neurologica entro le prime sei ore dal trauma, ed una valutazione più dettagliata, se eseguita a 72 ore e, ripetuta, entro il settimo giorno dopo la lesione. Consente inoltre il monitoraggio periodico del livello lesionale, della sua completezza/incompletezza e delle sue variazione nel tempo. Può essere applicata anche a distanza di anni per valutare evoluzioni o involuzioni.
I risultati della valutazione possono essere cinque, e vanno da una possibile ASIA A, che è il livello più grave, in quanto indica una lesione completa in cui non si hanno
21
funzioni né motorie né sensoriali
,
ad una ASIA E, in cui il paziente presenta funzioni motorie e sensoriali normaliFigura 2.10. La scala A.S.I.A.
2.2.1.2. La SCIM
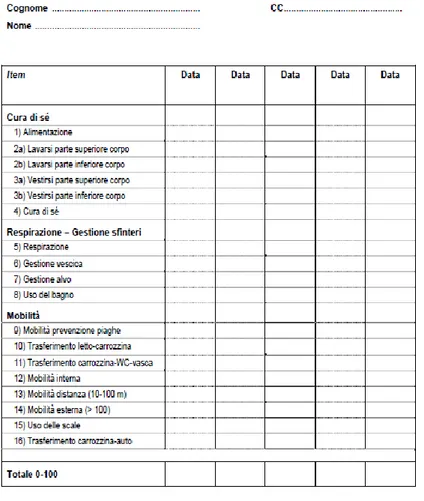
La scala SCIM (Spinal Cord Indipendtment Measure), è stata sviluppata specificatamente per le persone con lesione midollare in modo da avere la possibilità di descrivere le loro abilità nel compiere le azioni della vita quotidiana e fare una valutazione funzionale più sensibile ai cambiamenti . Non sono necessari strumenti di misura per completare questa scala, in quanto basta soltanto che l’osservatore compili la scheda riportata in figura 2.11.
Dal 1997 ad oggi sono state sviluppate tre versioni di questa scala. Nella prima, composta da sedici item, si può raggiungere un punteggio che va da zero a cento. Gli item sono suddivisi in tre sotto-scale, che sono: la cura di se , la respirazione e la
22
gestione degli sfinteri, e la mobilità, suddivisa in “stanza e bagno” e “interno ed esterno”
.
I punteggi associati a ciascun item dipendono dalla loro rilevanza clinica. Alcune modifiche sono state fatte sia nella seconda versione, in quanto alcuni item sono stati riformulati, sia nella terza versione, in quanto sono presenti diciannove item e non sedici.Figura 2.11. La scala SCIM.
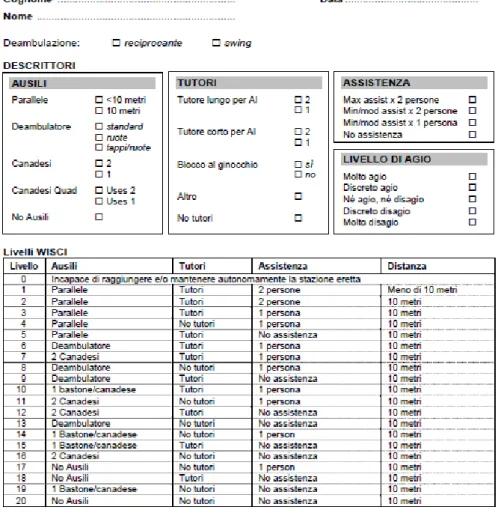
2.2.1.3 WISCI
Per quanto riguarda la scala WISCI (Walking Index for Spinal Cord Injury), i cui item
sono riportati in Figura 2.12, questa fornisce come risultato un indice, il cui valore indica il livello di compromissione nel cammino. Si va dal valore minimo pari a zero,
23 che indica che il soggetto non è in grado di raggiungere e/o mantenere la posizione eretta, ad un valore massimo pari a 20.
Attraverso l’osservazione del paziente, il terapista va ad associare il punteggio che ritiene opportuno in base alla capacità del paziente di riuscire a camminare.
24
2.2.2 I test del cammino
All'interno del gruppo dei pazienti con lesione midollare, i soggetti con un'abilità minima di deambulazione sono stati sottoposti ai seguenti test del cammino :
10-MWT: tempo impiegato dal paziente per percorrere 10 metri.
6-MWT : distanza percorsa dal paziente in 6 minuti.
TUG: tempo impiegato dal paziente per alzarsi dalla sedia, percorrere 7 metri, girarsi e tornare a sedersi
2.3 Il sistema EMG-wireless
Il sistema utilizzato per effettuare le registrazioni elettromiografiche di superficie è mostrato in Figura 2.13 ( Fonte: http://www.btsbioengineering.com)
Figura 2.13. Elettromiografo utilizzato.
L’elettromiografia in generale misura i potenziali d’azione che si sviluppano in un muscolo durante una contrazione . Quella di superficie si sta diffondendo sempre di più
25 sia a causa della sua non invasività, che per le potenzialità offerte dalle tecniche di analisi numerica del segnale .
Fornisce informazioni più globali inerenti al muscolo in esame ed evita i rischi dovuti all’uso di aghi, inoltre è una tecnica che può essere utilizzata in numerosi settori con diversi tipi di applicazioni: valutazione della forza muscolare, test isometrici, studio della fatica muscolare, studio e terapia del dolore, studio del controllo del movimento, analisi prestazionali in medicina dello sport, biofeedback della contrazione muscolare, studio del cammino, e valutazioni della attività muscolare in generale.
L’elettromiografo utilizzato durante il lavoro di tesi è prodotto dalla BTS-SpA, ed è chiamato BTS FREEMG-300.
Questo sistema consente di effettuare l’elettromiografia di superficie senza l’utilizzo di cavi, in quanto si basa interamente su tecnologia wireless, evitando così possibili intralci da parte dei fili.
Per il prelievo del segnale si possono utilizzare le sedici sonde presenti, il cui peso è di nove grammi. Queste, sono sonde miniaturizzate ad elettrodi attivi, il cui design garantisce il minor ingombro possibile ed il massimo confort. Questo fa sì che si possano utilizzare per effettuare analisi di qualsiasi tipo di movimento come la camminata e la corsa, per ogni distretto corporeo, senza alterare in alcun modo il gesto motorio del soggetto esaminato .
Ciascuna sonda si compone di un elettrodo madre e di un elettrodo satellite, ciascuno dotato di clip. Nell’elettrodo madre, si trovano il convertitore A/D, l’antenna e la batteria, mentre nell’elettrodo satellite si trova il signal conditioning (ovvero il preamplificatore ed il filtro) . Le due parti sono collegate attraverso un cavo flessibile e possono essere posizionate secondo le esigenze dell’utente a distanza variabile.
Tutte le sonde sono inoltre equipaggiate con una memoria tampone, a stato solido, per evitare la perdita dei dati nel caso in cui ci siano problemi alla rete wi-fi o a causa del superamento del range operativo utile.
Le sonde amplificano il segnale EMG, lo convertono in formato digitale e trasmettono i dati all’unità ricevente compatta e leggera, il cui peso è di circa 240 grammi, che può essere tenuta dal medico , posata sul tavolo o indossata dal paziente.
L’unità ricevente è costituita da due parti interconnesse, il PDA- basato sul sistema operativo Microsoft Windows - e l’unità di acquisizione. Quest’ultima è costituita da una scheda digitale, una scheda ricevitore ed una guida per l’inserzione del PDA. Oltre
26 agli elettrodi, sono presenti sonde in grado di prelevare dati provenienti dai footswitch o dati provenienti dagli elettrogoniometri.
Il tempo per la preparazione del paziente è piuttosto breve: le sonde, che non richiedono fissaggi con cerotti e biadesivi che potrebbero influenzare i movimenti, vengono agganciate tramite delle clip ai comuni elettrodi pre-gellati, i quali amplificano il segnale, lo convertono in formato digitale e trasmettono i dati ad un dispositivo portatile che visualizza i dati in tempo reale.
E’ possibile sfruttare sedici canali elettromiografici, due canali per i footswitch e quattro canali per gli elettrogoniometri (in dotazione insieme alle sonde).
Durante le registrazioni, sono stati utilizzati quattro elettrodi e due footswitch. Questi ultimi sono costituiti da una membrana resistiva, con uno spessore inferiore a 0.5 mm, che quindi presenta una massima flessibilità nel posizionamento.
Gli elettrodi, posizionati dal terapista, registrano l’attività del retto e del bicipite, sia sinistro che destro. Per quanto riguarda i due footswitch, di volta in volta venivano inseriti all’interno delle scarpe, in corrispondenza del tallone, in modo tale da registrare l’ “heel- contact”, ovvero l’istante in cui il tallone tocca il treadmill, indicando l’inizio del passo.
Questo sistema viene inoltre dotato di un software di supporto, chiamato Myolab, che è stato sviluppato per l’acquisizione di segnali EMG , la loro visualizzazione e per consentire un primo livello di processing. Consente inoltre di effettuare analisi approfondite, come ad esempio lo studio della fatica muscolare.
Oltre a Myolab, sono stati sviluppati altri due software, BTS EMG-Analyzer e BTS EMGenius, che sono più avanzati e consentono di effettuare un’analisi più approfondita.
Il BTS EMGenius è un software applicativo che serve per la valutazione dei movimenti di reaching e per la valutazione funzionale dei movimenti ciclici (nel cammino ad esempio, riesce ad indentificare in maniera automatica le due fasi) . L’interfaccia di BTS EMGenius è semplice ed intuitiva tanto che l’operatore impara immediatamente come usarlo.
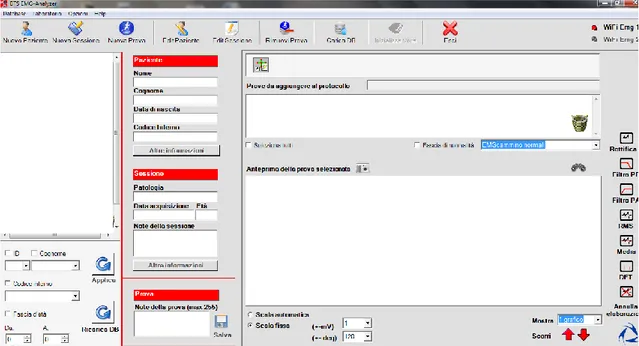
Quello utilizzato durante il lavoro di tesi è il BTS EMG-Analyzer. Questo è il software più completo per l’analisi dei segnali EMG, in quanto non solo include dei templates predefiniti per la valutazione dei segnali, ma integra inoltre la possibilità di creare nuovi
27 protocolli. L’utente può infatti decidere di creare un nuovo protocollo in maniera molto semplice, grazie all’interfaccia utente molto intuitiva (Figura 2.14).
Come si può vedere, sulla parte sinistra della schermata sono raggruppate le varie acquisizioni per ciascun soggetto, mentre sulla parte destra ci sono le varie opzioni che possono essere utilizzate per l’analisi, come, ad esempio, l’applicazione dei filtri o la trasformata di Fourier. Al centro della schermata è possibile visualizzare i segnali registrati dai singoli elettrodi, ed è possibile effettuare operazioni di zoom, o vederli raggruppati per un possibile confronto.
Per poter acquisire i segnali registrati dagli elettrodi, si sfrutta la connessione wireless: durante la registrazione le sonde inviano i segnali al PDA che viene fornito in dotazione, e che serve inoltre per l’attivazione delle sonde stesse. Una volta completata la registrazione, sempre tramite l’utilizzo del PDA e ponendosi su quest’ultimo in modalità “download”, è possibile inviare tali dati al software.
Figura 2.14. Interfaccia programma BTS EMG-Analyzer.
La frequenza di acquisizione è pari ad 1 KHz con una risoluzione di 16 bit per ogni singolo canale.
Una volta che i vari segnali sono trasferiti, è possibile convertirli in formato .emt e procedere con un analisi più approfondita tramite apposite routine costruite in ambiente Matlab.
28 Nelle seguenti tabelle sono riportate le varie caratteristiche :
Tabella 2.1. Caratteristiche tecniche delle sonde.
Canali elettromiografici fino a 16 sonde wireless su singola unit`a ricevente
Trasmissione dati fino a 16 sonde wireless su singola unità ricevente
Display VGA touch-screen
Cording Duration fino a 9h con batteria singola
Portata unità ricevente-data station fino a 30 metri indoor - fino a 350 metri outdoor
Peso e dimensioni 240 grammi - 152 x 82 x 22.5mm Tabella 2.2. Caratteristiche tecniche dell’ unità ricevente portatile.
Elettrodi di superficie Elettrodi di superficie a geometria variabile Risoluzione 16bit - frequenza acquisizione 1KHz
Trasmissione dati Trasmissione dati wireless IEEE 802.15.4
Batteria Ricaricabile con caricatore dedicato
(connettore clip)
Autonomia 5h in acquisizione continua.
Portata sonde-unità ricevente Fino a 50 metri in spazio libero in presenza di ostacoli interposti)
Memoria Memoria tampone a stato solido on board
LED di stato indicatore acquisizione/stand-by, batteria scarica
29
2.4 Routine Matlab
Per analizzare i segnali EMG ed i dati cinematici, sono state scritte e implementate delle routine in ambiente Matlab. Lo schema di queste ultime è riportato in figura 2.15.
Elaborazione_dati_emg.m
Figura 2.15. Flusso delle routine Matlab.
Per semplicità nella figura 2.15 è stato riportato solo il caso dei segnali riguardanti la modalità attiva, per quella passiva il grafico non cambia.
Taglio_attivi.m Make_cycles.m Filtro_attivi.m Interp_attivi.m Conf_inter_att.m Chiamata_attivi.m Integrali.m Grafici.m
30
2.4.1 Routine per l’analisi di segnali EMG
L’obiettivo di questa routine è quello di processare ed analizzare i segnali EMG, includendo le operazioni di filtraggio, interpolazione, e il calcolo dell’integrale del segnale interpolato.
I requisiti dal punto di vista “clinico”, sono stati quelli di poter acquisire i segnali EMG e di poter eventualmente eliminare manualmente porzioni di segnale con artefatti da movimento.
Per fare ciò, si è pensato di porre dei limiti ai tagli da poter fare: se infatti più di metà segnale è rumoroso, allora è consigliato ripetere la registrazione.
I segnali di interesse sono stati precedentemente convertiti in formato .emt e salvati in sette cartelle, corrispondenti ciascuna ad ogni paziente. Dentro ogni cartella, è stata creata un’ulteriore cartella che indica la data della seduta.
I file così salvati, si presentano sotto forma di file testo (Figura 2.16). Il file poi riportato in Matlab sarà una matrice di otto colonne. Queste rappresenteranno rispettivamente il frame, il tempo, il segnale proveniente dal primo elettrodo , corrispondente a quello del retto femorale sinistro, il segnale proveniente dal secondo elettrodo, corrispondente a quello del bicipite femorale sinistro, il segnale proveniente dal terzo elettrodo , corrispondente a quello del retto femorale destro, il segnale proveniente dal quarto elettrodo, corrispondente a quello del bicipite femorale destro, ed infine nelle ultime due colonne, ci saranno i segnali provenienti dai due footswitch, rispettivamente destro e sinistro.
31 Figura 2.16. File relativo ad una registrazione.
Per poter effettuare tutte le operazioni necessarie, sono state implementate una serie di funzioni Matlab.
1) Funzione # 1: caricamento dei dati, selezione e filtraggio
Per caricare il segnale è stato utilizzato il comando “ load” :
passivo_1=load('C:\Users\Elena\Desktop\perpazienti\Divita\seconda\pass ivo1.emt');
passivo_1 è una matrice di otto colonne, la cui lunghezza è di circa 60000 campioni. La lunghezza delle colonne dipende infatti dal tempo di registrazione: ogni registrazione ha una durata media di 60 secondi, poiché però allo scadere del minuto è necessario compiere alcune operazioni di salvataggio, è possibile che la lunghezza vari da registrazione a registrazione.
Affinché tutti i segnali abbiano la stessa durata, è stato deciso di prelevare i primi 60000 campioni di ciascuna colonna, ad esempio:
32 retto_six_tot=attivo_1(:,3);
s=60000;
retto_six=retto_six_tot(1:s);
Per poter poi tagliare il segnale in modo tale da eliminare prima del filtraggio le componenti associate agli artefatti di movimento, è stato necessario capire come individuare l’inizio e la fine di ciascun passo. Per fare ciò sono stati analizzati i segnali provenienti dai due footswitch. Questi segnali hanno un andamento come quello riportato in figura 2.17, dove in rosso è stato evidenziato un passo.
Figura 2.17. Segnale ottenuto dal footswitch sinistro.
Come si può notare, l’ampiezza di tale segnale varia da zero a 1.6 quindi per riuscire ad individuare i punti di interesse è stata usata la funzione find , tramite questa si trovano tutti gli indici degli elementi diversi da zero. Per trovare poi la fine del passo, è stato realizzato un ciclo for che individua l’indice della transizione alto-basso. Quello che si ottiene alla fine del ciclo è un vettore, il vettore “in”, che contiene tutti gli indici di inizio e fine passo.
Dopodiché è possibile procedere con la selezione manuale del segnale. Per fare ciò è stata utilizzata l’opzione “cursor_info” presente in Matlab (Figura 2.18). Una volta plottato il segnale di interesse, grazie all’opzione utilizzata, è possibile andare con il mouse sui punti di interesse, estrapolare poi il valore numerico del punto e salvare l’informazione sul workspace. Cliccando infatti sui punti e successivamente su “export_data”, si salvano i valori sul workspace all’interno della struttura “cursor_info”.
33 L’idea che sta alla base della selezione, è infatti quella di prendere il segnale fino al primo punto individuato e poi dal secondo fino alla fine ( se ad esempio si decide di tagliare una sola parte), ottenendo così il segnale tagliato (Figura 2.19).
Per essere sicuri che i punti in cui il segnale viene tagliato siano effettivamente quelli contenuti nel vettore in, sono stati eseguiti due “controlli” : un primo, più semplice, è quello di mostrare sul grafico stesso i valori del vettore , contenente appunto i valori di inizio e fine passo. In questo modo il medico può rendersi subito conto se la selezione che vuole fare avviene nei punti giusti oppure no.
Figura 2.18. Utilizzo del cursore per tagliare manualmente il segnale
Figura 2.19. Segnale precedente tagliato.
L’altro controllo, è stato posto all’interno della routine Matlab: viene eseguito infatti un confronto tra i punti contenuti nella struttura e i punti del vettore in. Se il confronto dà esito positivo – ovvero sono uguali- allora è possibile procedere con la selezione, altrimenti no.
34 E’ stato poi posto un limite alla quantità di segnale da selezionare: se infatti più della metà del segnale è rumoroso, allora la registrazione è da ripetere. Altrimenti è possibile tagliare il segnale in più parti , sempre che la lunghezza totale del segnale tagliato sia almeno pari a trenta secondi.
Per eseguire tutti questi controlli, sono stati scritti più cicli for ed if inseriti all’interno di un ciclo if. Quest’ultimo serve per individuare quanti punti di taglio sono stati scelti, e di conseguenza, in quante parti è stato deciso di tagliare il segnale: se ad, esempio, il numero dei punti scelti è pari a due, allora vuol dire che è stato deciso di tagliare una parte sola del segnale, se invece il numero dei punti è pari a quattro, allora il segnale è stato tagliato in due parti, e cosi via. Ovviamente, visto che devono essere scelti l’inizio e la fine del taglio, il numero dei punti da dover indicare deve essere sempre pari. Il primo ciclo for che si trova all’interno dell’if, serve per verificare che i punti scelti siano esattamente quelli contenuti all’interno del vettore in . Una volta prelevati i vari valore dal vettore in e dalla struttura “cursor_info” si esegue un confronto tramite un secondo if . Se i valori sono uguali, allora si procede con la selezione del segnale relativo al muscolo di interesse e con la selezione del segnale relativo al footswitch. Dopodiché, tramite un altro if si va a verificare che la lunghezza del segnale tagliato sia almeno pari a trenta secondi. A questo punto, se tutti i controlli danno esito positivo, si procede con il plot del segnale tagliato.
A questo punto è stata eseguita la media del segnale relativa a ciascun passo tramite la funzione “make_cycles”, ottenuta dalla piattaforma MatlabExchange. Se si hanno “n” passi rimanenti dopo la selezione, si avranno “n” segnali medi e quello che si ottiene alla fine di questa funzione è un unico segnale medio, che rappresenta la media delle medie, espressa in relazione alla percentuale del passo . Dopodiché è possibile procedere con il filtraggio.
Per quanto riguarda il filtraggio, seguendo anche la letteratura [44], è stato deciso di eseguire un filtro di Butterworth prima passa alto e poi passa basso di ordine quattro. Nel caso del filtro passa alto, la frequenza di taglio e la frequenza di banda stoppata sono state poste rispettivamente a 20 Hz 150 Hz. Il ripple e l’attenuazione in banda stoppata sono invece stati posti rispettivamente a 3 dB e 60 dB.
Per quanto riguarda invece il passa basso, è stata cambiata solo le frequenza di taglio ed è stata posta pari a 5 Hz.
35 Figura 2.20. Modulo del segnale tagliato, filtrato e mediato.
La selezione ed il filtraggio vengono eseguiti solo se i punti scelti manualmente sono gli stessi presenti nel vettore in. Infatti, se cosi non avviene o se il segnale tagliato è troppo corto, viene mostrato un messaggio di errore.
Lo script completo per la chiamata, la selezione ed il filtraggio è riportato di seguito, si riporta solo il caso di un muscolo, ad una velocità e solo nel caso di un taglio in due punti ( per lo script completo vedere in appendice A).
2) Funzione # 2: interpolazione.
Un aspetto importante dell’ interpolazione è quello di individuare la giusta classe di funzioni e di scegliere il modello migliore di approssimazione, per questo è stato deciso di interpolare i segnali con tre diverse interpolazioni.
La scelta del modello migliore deve tener conto delle proprietà specifiche della funzione interpolante come, ad esempio, l’essere facilmente calcolabili ed il godere di buone proprietà di regolarità . Le classi di funzione più usate sono la classe delle funzioni razionali ( tra cui i polinomi) e la classe delle funzioni trigonometriche. Per questo sono state utilizzate l’interpolazione polinomiale, l’interpolazione gaussiana, e quella basata sulla somma di seni.
Una volta trovati i vari modelli interpolanti, è stato calcolato l’errore di interpolazione, ed è stato visto quale interpolazione dà un errore minore, stabilendo così quale sia l’interpolazione migliore.
36
2.1 Interpolazione polinomiale
Con l’interpolazione polinomiale si cerca di approssimare il segnale tramite un polinomio di grado “n”, che presenta un andamento del tipo:
pn(x)=anxn + an-1xn-1 + ….+ a1x+ a0
Non sapendo a priori il grado ideale, è stato deciso di interpolare i segnali con dei polinomi i cui gradi variano da tre a nove. La scelta di tali gradi è stata legata al fatto che gradi inferiori a tre o superiori a nove danno una pessima interpolazione.
Per fare questo in Matlab, sono state utilizzati i comandi polyfit e polyval.
La prima trova i coefficienti del polinomio p(x) di grado n e fitta i dati mediante il metodo dei minimi quadrati.. Il risultato è un vettore p di lunghezza n+1 che contiene i coefficienti del polinomio in ordine decrescente.
L’algoritmo su cui si basa questa funzione prevede il calcolo della matrice di Vandermode, la quale è matrice non singolare, ovvero con determinate diverso da zero. Imponendo :
Va=y
Dove V è la matrice di Vandermode, a è il vettore dei coefficienti del polinomio ed y è il vettore contenente i valori del polinomio calcolati nel vari punti, si ottiene una sola soluzione del sistema. Questo implica che il polinomio interpolante è unico.
Per quanto riguarda invece la funzione polyval, questa restituisce il valore del polinomio di grado “n”. L’ingresso di questa funzione è un vettore p, di lunghezza n+1, i cui elementi sono i coefficienti del polinomio interpolanti ordinati in ordine decrescente. Lo script completo è riportato in appendice e ciò che si ottiene è mostrato in figura 2.21.
37 Figura 2.21. Risultati interpolazione polinomiale con i diversi gradi.
Come si può notare, dal grafico non si può stabilire quale sia il grado che meglio interpola il segnale, ed è per questo sono stati calcolati gli errori. Questi ultimi sono stati ottenuti facendo la differenza, punto per punto, tra il segnale ed il polinomio interpolante. Si ottengono così sette vettori che rappresentano gli errori. Sono sette vettori, in quanto i gradi scelti vanno dal grado tre al grado nove. Sono stati esclusi gli altri gradi in quanto già a priori è stato possibile stabilire che l’interpolazione era pessima.
Infine, per stabilire quale grado restituisce un errore minore, i sette vettori sono stati inseriti all’interno di un’unica matrice, che quindi risulterà avere sette colonne.
E’ stata poi calcolata la somma per colonne – e quindi la somma degli errori punto per punto per ciascun grado- ottenendo così un vettore “m” con sette elementi. Poiché si cerca il valore minimo, di questi è stato considerato il valore minore.
A questo punto è possibile sapere il grado del polinomio che interpola meglio quel determinato muscolo.
Infine , sono stati raccolti in un vettore tutti i valori dei gradi minimi dei polinomi che meglio interpolano tutti i segnali.
38
2.2 Interpolazione gaussiana.
Per quanto riguarda questo tipo di interpolazione, il concetto che ci sta alla base non cambia rispetto all’interpolazione di tipo polinomiale. Quelle che cambiano sono il tipo i funzioni interpolanti.
Mentre prima si avevano dei polinomi di grado “n”, adesso si hanno delle funzioni esponenziali i cui coefficienti variano di volta in volta e dipendono anche dal grado scelto. Anche in questo caso, non sapendo a priori il grado che fornisce la funzione che meglio interpola il segnale, le funzioni che sono state calcolate hanno gradi che variano dal secondo fino all’ottavo.
Con il comando fittype viene specificato che tipo di interpolazione si vuole fare. Inserendo, ad esempio, tra apici gauss2 , vuol dire che si vuole fare un’interpolazione di tipo gaussiana e di grado due. Utilizzando poi il comando fit, si esegue un fit dei dati con il modello di interpolazione voluto. Infine tramite il comando coeffvalues è possibile calcolarsi i coefficienti della funzione che andremo ad utilizzare per eseguire l’interpolazione.
Alla fine per ciascun segnale si avranno dei plot come quelli riportati in figura 2.22.
Figura 2.22. Risultati interpolazione polinomiale con i diversi gradi.
Anche in questo caso, per riuscire a trovare la funzione che meglio approssima il segnale è stato effettuato lo stesso procedimento di prima ed anche in questo caso, i dati sono stati salvati in un vettore, che verrà riutilizzato in seguito.
39
2.3 Interpolazione con somma di seni
Questa è l’ultima tipologia di interpolazione che è stata analizzata. Il procedimento per ottenerla è simile a quello svolto per ottenere l’interpolazione gaussiana, ma cambia il tipo di funzione utilizzata, in quanto non saranno sommate delle funzioni esponenziali, ma si avrà la somma delle funzioni seno.
Anche in questo caso, non sapendo a priori quale grado meglio approssima il segnale, è stato deciso di prendere in considerazione funzioni il cui grado varia da due a nove. Nel caso ad esempio del grado due, per ottenere la funzione di interesse, è stato utilizzato il seguente codice:
Anche in questo caso i coefficienti dipendono anche dal grado utilizzato. Quello che si ottiene per ciascun segnale è un plot come quello riportato in figura 2.23.
Per scegliere infine il grado della funzione che meglio interpola i segnali, è stato utilizzato lo stesso ragionamento effettuato per le interpolazioni precedenti.
40
3) Funzione # 3: confronto tra le interpolazioni.
Una volta ottenuti tutti i dati relativi alle varie interpolazioni, è stato eseguito un confronto per vedere quale delle tre fornisce un errore minore, e quindi quale interpola meglio i segnali.
A questo punto infatti si ha per ogni interpolazione il grado delle funzioni che meglio interpolano i segnali e non resta che confrontare tra di loro i vari valori minimi.
Per eseguire il confronto, sono stati creati tre vettori di “appoggio”, inizialmente posti uguali a zero. Questi vettori servono per contare quante volte l’interpolazione che fornisce errori minori è quella polinomiale, quante quella gaussiana e quante quella basata sulla somma di seni.
Richiamando infatti la struttura associata agli errori, è possibile scrivere una serie di cicli if che contano quale interpolazione interpola meglio e più spesso i segnali.
Fatto questo per ciascun segnale, si vanno a mettere i risultati all’interno di un vettore: A questo punto, è possibile andare a vedere il grado della funzione dell’interpolazione migliore che meglio interpola i segnali.
Di seguito è riportato la parte di script relativo all’interpolazione polinomiale ( per le altre due , vedere appendice).
Con il primo if , vado a vedere quale tipo di interpolazione si sta considerando, e dipende dalla parte precedente dello script. Se quest’ultima restituisce il valore uno, allora l’interpolazione migliore è quella polinomiale, se restituisce il valore due, allora l’interpolazione migliore è quella gaussiana, infine se il valore restituito è pari a tre , allora l’interpolazione migliore è quella relativa alla somma dei seni.
Per vedere i gradi, ho costruito altri vettori “conta” di appoggio, che mi servono per contare quante volte esce il grado due, quante il grado tre e così via.
Alla fine si ottiene un vettore contenente i vari conteggi. Tramite poi il comando max, è possibile individuare il valore massimo del conteggio. Questo mi rappresenta il grado relativa alla migliore interpolazione che meglio approssima i segnali.
41
4) Funzione # 4: l’integrale.
A questo punto si considera il segnale interpolato con l’interpolazione che restituisce l’errore minore. Quello che rimane da fare per capire gli effetti della terapia, è calcolare l’area sottostante al segnale, e quindi si deve calcolare l’integrale.
Poiché stiamo parlando della deambulazione, è utile ricordare la complessità del cammino: si possono distinguere infatti due periodi quello di appoggio (stance) e quello di volo (swing) [45] (figura 2.24). Ogni ciclo inizia e termina con entrambe i piedi a contatto con il terreno, mentre a metà ciclo solo un piede tocca il terreno e l’altro e sempre sollevato dal suolo.
Figura 2.24. Le fasi del cammino.
La fase di stance identifica l’intero periodo durante il quale il piede è a contatto con il terreno e nell’intero ciclo del passo ha una durata di circa il 60%. La fase di swing si riferisce invece al tempo in cui il piede si trova sollevato per l’avanzamento dell’arto, ed ha una durata di circa il 40%.
Si è voluto capire la fase in cui l’integrale aumenta per riuscire a capire se l’attivazione del muscolo avveniva, e se avveniva effettivamente nella giusta fase.
Per fare questo, si è suddiviso il segnale in due parti, prendendo per lo stance il primo 60% del segnale e per lo swing il restante 40% (vedere appendice C sull’ analisi del cammino).
Per calcolare infine l’integrale, è stata utilizzata la funzione “trapz”.Quest’ultima calcola l’integrale mediante un’approssimazione con più trapezi.
42 Sia y = f(x) una funzione definita in un intervallo [a; b], il metodo dei trapezi approssima l'integrale della funzione (figura 2.25) sul dominio attraverso la seguente formula:
I = [f(b) + f(b)];
Figura 2.25. Approssimazione integrale con il metodo dei trapezi.
2.4.2 Routine per l’analisi dei dati cinematici
Per l’analisi dei dati cinematici è stato necessario in primis caricare i dati in Matlab. Dopodiché si è dovuto capire la durata del segnale, che deve essere sempre pari a sessanta secondi, e la durata di ciascun passo, sia nel caso attivo che nel caso passivo per entrambe le velocità.
Poiché si vogliono segnali di sessanta secondi, è stato realizzato un primo ciclo if necessario per vedere effettivamente se la loro durata equivale o no a quella voluta. Se così non è, i vari segnali vengono tagliati.
A questo punto, è possibile andare a calcolare l’errore come differenza tra l’angolo ideale e quello effettivo, ottenendo, ad esempio, un andamento come quello riportato in figura 2.26. Questa rappresenta l’errore relativo all’anca sinistra durante l’intera registrazione.
43 Figura 2.26. Segnale relativo all’errore di anca sinistra, caso passivo, v1 (1 km/h).
Per riferire l’errore ad un singolo passo, è stato quindi necessario trovare gli indici di inizio e fine passo, plottando così gli andamenti per ciascun passo (figura 2.27). Per capire gli indici di inizio e fine passo, è stata utilizzato il seguente ciclo for:
for h=2:14
indici_inizio(1)=1;
indici_inizio(h)=indici_inizio(h-1)+1071; end
Dove h varia da due fino a quattordici perché quando la velocità è pari ad 1 km/h, vengono realizzati quattordici passi in sessanta secondi. Il valore di 1071 è stato ottenuto considerando la lunghezza del vettore tagliato, e considerando il numero dei passi compiuti.
44 Figura 2.27. Errore relativo alla traiettoria di anca sinistra, caso passivo, v1 (1 km/h) relativo ad
a ciascun passo.
Infine è stata calcolata la media per ciascun passo, la quale mostra un andamento come quello riportato ad esempio in Figura 2.28.
Figura 2.28. Errore mediato relativo alla traiettoria di anca sinistra, caso passivo, v1 (1 km/h).. .
Per calcolare gli integrali nella fase di stance e di swing è stata infine utilizzata la funzione trapz, come per i dati cinematici.
45
2.5 Analisi statistica
Per decidere se i risultati ottenuti sono statisticamente significativi, è stato deciso di effettuare il t-test.
Tutti i test statistici di significatività assumono comunque un’ipotesi iniziale, chiamata ipotesi zero, o ipotesi nulla. Quando si effettua il confronto fra due o più gruppi di dati, tale ipotesi prevede sempre che non esista alcuna differenza tra i gruppi riguardo al parametro considerato. Quindi se l’ipotesi nulla è valida, si può concludere che i campioni vengono dalla stessa popolazione e le eventuali differenze osservate tra di loro in relazione al parametro considerato, devono essere attribuite al solo caso.
La decisione di respingere l’ipotesi nulla può essere giusta, ma potrebbe anche essere errata. La probabilità di commettere questo errore si chiama livello di significatività del test e questo valore può essere scelto a piacere, anche se solitamente viene fissata ai valori tipi di 0.05 (5%) o di 0.01 (1%). Nel lavoro di tesi i valori scelti sono appunto pari a 0.05 e 0.01.
Se il parametro che andiamo a considerare dei due campioni è la media e vogliamo sapere se l’ eventuale differenza fra medie è significativa useremo il test di Student. La distribuzione di probabilità della variabile aleatoria t presenta una forma a campana e simmetrica (figura 2.29) . La dispersione diminuisce con il numero di gradi di libertà. Pertanto non vi esiste una sola curva t ma, a differenza di quanto avviene per la distribuzione normale, esiste una intera famiglia di distribuzioni t, una per ogni grado di libertà. Questo significa che la variabile aleatoria t ha una sua distribuzione per gli esperimenti con 5 campioni (n = 5), per 6 (n = 6), ecc. Aumentando il numero di campioni n, la distribuzione di Student tende a una distribuzione Normale (disegnata in Figura 22 con n = ∞).
Il t-test parte dall’ analisi della distribuzione mostrata in Figura 22 e può essere applicato in due modi: se si vuole sapere se le medie sono uguali o diverse,allora si una il test di Student nella forma bilaterale (a due code). Se invece si vuole sapere se una media è maggiore dell’altra, allora si usa nella forma unilaterale.
46 Figura 2.29. Andamento t-test.
Poiché si sono confrontati i valori relativi ai segnali EMG e i valori relativi alle variabili cinematiche prima e dopo il trattamento, il test che è stato utilizzato è quello a due code.