Capitolo VI
Conclusioni generali e sviluppi
futuri
6.1. Conclusioni
generali
Con il lavoro svolto nell’ambito di questa tesi si è completato l’iter di progettazione, di caratterizzazione sensoristica e di controllo per la messa in funzione del prototipo di strumento attivo per la compensazione automatica dei movimenti involontari in microchirurgia.
Dal punto di vista della progettazione, è possibile fare un sunto dello studio svolto, mettendo a confronto il prototipo di bisturi, realizzato presso il Polo Tecnologico Valdera della Scuola Superiore Sant’Anna, con Micron (Riviere et al., 2003; Riviere et al., 1998), realizzato presso la Carnegie Mellon University dallo staff del Prof. Riviere e con il progetto ideato da (Grassei, 2001), che ha rappresentato un punto di partenza per questa tesi.
Schematizzando per punti le principali tematiche di confronto si tirano le fila di questa analisi.
 Peso e dimensioni del bisturi meccatronico
Questa specifica è stata particolarmente importante nel corso di questa progettazione (vedi Cap. 1).
Il peso dello strumento (vedi Tab. 6-1), infatti, è direttamente correlato all’ampiezza del tremore fisiologico ed un suo aumento può portare ad un incremento anche del fenomeno stesso da compensare.
Inoltre, il peso, assieme alle dimensioni, influenza anche l’ergonomia e la fruibilità del bisturi e, di conseguenza, l’affaticamento del chirurgo durante l’utilizzo di questo strumento attivo.
Tabella 6 - 1: Peso in grammi del prototipo realizzato nell’ambito di questa tesi, di (Grassei, 2001), di (Riviere et al, 2003; Riviere et al, 1998) e di un bisturi passivo per chirurgia vitroretinale.
Dimensioni di riferimento
Prototipo della
tesi Progetto Grassei Prototipo Micron
Lunghezza massima (mm) 195 183 210 Diametro dell'impugnatura (mm) 9÷19 9÷19 22
Tipo di sezione Circolare Circolare Rettangolare
Diametro
massimo (mm) 25 25 48 x 19
Tabella 6 - 2: Dimensioni ed ingombri massimi del prototipo realizzato nell’ambito di questa tesi, di (Grassei, 2001), di (Riviere et al, 2003; Riviere et al, 1998) e di un bisturi passivo.
Uno dei target di questa progettazione si è indirizzato verso la più possibile similarità dimensionale (vedi Tab. 6-2) di questo prototipo meccatronico con i più
Prototipo della tesi Progetto Grassei Prototipo Micron Bisturi Passivo
classici strumenti utilizzati in microchirurgia, in modo da minimizzare l’impatto sulle abitudini di utilizzo dell’utente.
Figura 6 - 1: Il prototipo di bisturi meccatronico a confronto con una penna di uso comune. Ai due strumenti si frappone una riga che evidenzia la lunghezza di entrambi.
Oltre alla nuova ricerca nello stato dell’arte, per selezionare attuatori e sensori di dimensione ancora più piccole di quelli di (Grassei, 2001), ma anche più performanti, nel prototipo realizzato si è ricercata e realizzata anche la soluzione per amplificare gli spostamenti lungo l’asse longitudinale dello strumento.
La scelta perseguita ha portato all’incremento della lunghezza massima dello strumento rispetto a (Grassei, 2001), ma restando, in ogni caso, al di sotto di quella occupata da (Riviere et al., 2003).
 Numero d’attuatori in serie
Il movimento della punta dell’utensile, vero e proprio “end effector” del bisturi, è assicurato dalla modifica della lunghezza delle tre serie d’attuatori, montati sulla stessa circonferenza base in direzione longitudinale e sfalsati tra sé di un angolo
Le colonne d’attuazione determinano anche l’accuratezza del posizionamento dell’utensile attraverso la loro catena di tolleranze d’utilizzo. Minimizzando, quindi, il numero d’attuatori (vedi Tab. 6-3) montati in serie sul bisturi, sarà possibile anche diminuire gli errori generati sullo spostamento della punta.
Prototipo della
tesi Progetto Grassei Prototipo Micron Numero
d’attuatori utilizzati
3 in serie 4 in serie 7 in serie
Tabella 6 - 3: Numero di attuatori in serie sul prototipo realizzato nell’ambito di questa tesi, di (Grassei, 2001) e di (Riviere et al, 2003; Riviere et al, 1998).
Il decremento del numero d’attuatori in serie è stato possibile attraverso la progettazione e la susseguente realizzazione dell’amplificazione idraulica degli spostamenti lungo l’asse longitudinale Z.
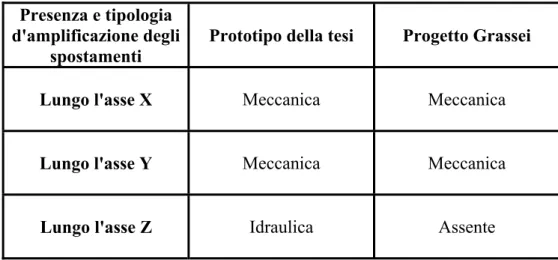
 Amplificazione dei movimenti rispetto a (Grassei, 2001)
E’ possibile, inoltre, paragonare la progettazione di questo prototipo con quella perseguita in (Grassei, 2001) con un altro termine di confronto (vedi Tab. 6-4):
Presenza e tipologia d'amplificazione degli
spostamenti
Prototipo della tesi Progetto Grassei
Lungo l'asse X Meccanica Meccanica
Lungo l'asse Y Meccanica Meccanica
Lungo l'asse Z Idraulica Assente
Tabella 6 - 4: Presenza e tipologia d’amplificazione degli spostamenti lungo i tre assi di riferimento nel prototipo realizzato nell’ambito di questa tesi ed in (Grassei, 2001).
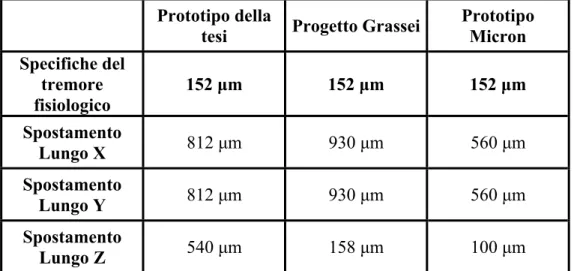
 Spazio di lavoro raggiungibile dalla punta del bisturi
Nello svolgimento della progettazione di questa tesi si è preferito continuare sulla strada intrapresa da (Grassei, 2001) con la scelta di un’architettura d’attuazione ribaltata, realizzata con l’ ”end effector” posizionato inferiormente rispetto al piano della piattaforma d’appoggio (vedi Allegati – Complessivo e Particolare n°6 -). Grazie a questo tipo di progettazione (vedi Tab. 6-5), infatti, è stato possibile ottenere una maggior amplificazione meccanica dei movimenti della punta dell’utensile lungo gli assi di riferimento X e Y, ortogonali all’asse longitudinale Z, e massimizzare, rispetto alla possibile configurazione diretta, il campo di lavoro, a parità d’estensione degli attuatori e con i medesimi ingombri.
A fronte di un numero d’attuatori in serie utilizzati, com’è stato esposto in precedenza, attraverso la scelta dei nuovi attuatori piezoelettrici multistrato (Nec-Tokin) e la realizzazione dell’amplificazione idraulica degli spostamenti longitudinale è stato possibile ottenere degli spostamenti paragonabili a quelli di (Grassei, 2001) per i movimenti della punta giacenti lungo l’asse X ed Y, mentre si è incrementato notevolmente lo spazio lavorativo massimo lungo l’asse Z, passando da 158 µm a 540 µm, rispetto a (Grassei, 2001), mentre rispetto a (Riviere et al., 2003), il miglioramento è espresso nel salto da 100 µm a 540 µm.
Prototipo della tesi Progetto Grassei Prototipo Micron Specifiche del tremore fisiologico 152 µm 152 µm 152 µm Spostamento Lungo X 812 µm 930 µm 560 µm Spostamento Lungo Y 812 µm 930 µm 560 µm Spostamento Lungo Z 540 µm 158 µm 100 µm
Le specifiche fisiologiche del tremore sono tratte da una ricerca svolta presso il J. Hopkins Hospital di Baltimora (Riviere e Thakor, 1995).
6.2. Sviluppi
futuri
Il lavoro svolto nella tesi ha spaziato dal campo della progettazione a quello della realizzazione tecnologica, presso il Polo Tecnologico Valdera della Scuola Superiore Sant’Anna, di tutte le componenti del prototipo di bisturi meccatronico.
E’, quindi, ipotizzabile la stesura di un protocollo di sperimentazione mirato a testare il funzionamento dello strumento attivo ed a quantificare la sua capacità d’attenuazione del tremore fisiologico durante operazioni microchirurgiche.
In particolar modo, saranno realizzati dei test da parte di un campione di possibili utenti del bisturi e, quindi, di un campione di chirurghi oftalmici e neurologici.
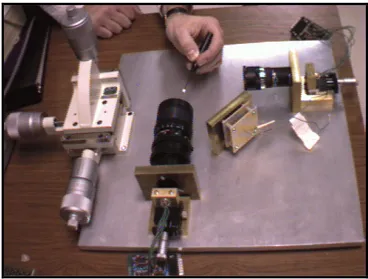
Le prove potranno essere condotte allestendo un banco prova, rifacendosi alle procedure già adottate in (Riviere et al, 2003; Riviere et al, 1998).
Una sua possibile configurazione (vedi Fig. 6-1) prevede l’installazione di un LED luminoso sulla punta del bisturi e di un gruppo di telecamere CCD per l’acquisizione della traiettoria della punta e la successiva elaborazione delle immagini acquisite.
Figura 6 - 2: In (Riviere et al., 2003) si è provveduto al controllo del sistema a ciclo chiuso tramite un LED luminoso posto sull’estremità dell’asta porta utensile. La sua emissione è stata raccolta mediante due
Un’altra possibile configurazione (vedi Fig. 6-2) prevede l’installazione sulla punta di un gruppo di magneti e di un insieme di sensori ad effetto Hall capaci di leggere i campi magnetici generati negli spostamenti tridimensionali dell’utensile.
Figura 6 - 3: In (Riviere et al., 2003) si è provveduto al controllo del sistema a ciclo chiuso tramite dei sensori ad effetto Hall, posti all’estremità dell’asta porta utensile.
Con uno di questi due sistemi di prove sarà possibile anche caratterizzare il movimento della mano stessa del chirurgo e ricercare al suo interno eventuali ricorsività personali che potrebbero aprire la strada verso un’interfaccia personalizzato per l’utente dello strumento attivo.
Al tempo stesso la caratterizzazione di uno di questi due banco prova proposti potrebbe far nascere un simulatore di interventi microchirurgici.
Dato che il prototipo è attualmente controllato a ciclo aperto, è auspicabile uno sviluppo ulteriore della componente di controllo che porti ad un controllo a ciclo chiuso, con l’inserzione di sensori che possano monitorare costantemente la traiettoria della punta dell’utensile.
Ad esempio, potrebbe essere impiegati dei sensori di campo terrestre per assolvere a questo compito.
Si riporta (vedi Fig. 6-3) una possibile configurazione dello schema di controllo a ciclo chiuso, già utilizzato in (Riviere et al., 2003):
Figura 6 - 4: Schema a blocchi del controllo a ciclo chiuso utilizzato per le prove di funzionamento di (Riviere et al., 2003).
Gli sviluppi suddetti sono strettamente attinenti alla tesi svolta e, quindi, riguardano direttamente la compensazione dei movimenti involontari della mano, provocati dal tremore fisiologico.
Abbandonando questo campo e spaziando all’interno di quello riguardante le forme di tremore patologico, potrebbe essere ipotizzabile la riconversione di questo progetto verso la costruzione di una penna attiva (vedi Fig. 6-5) per la cancellazione di questi altri tipi di movimenti involontari.
La loro ampiezza, tuttavia è ben maggiore di quella del tremore fisiologico e può raggiungere anche picchi di 2 mm.
Appare, dunque, evidente che il campo di lavoro raggiungibile dalla punta attualmente è insufficiente a queste nuove specifiche e, di conseguenza, dovrebbero essere probabilmente gli ingombri della penna69, la tipologia ed il numero degli attuatori70.
Questo progetto, però, ha potenziali margini di sviluppo ulteriori e, già adesso, potrebbe essere dotato di tre attuatori aggiuntivi, ognuno in coda ad una delle tre colonne
69 A scapito peraltro dell’ergonomia dello strumento.
70 Aspettando successive innovazioni tecniche in questo campo ed aumentare, così, ulteriormente
longitudinali, modificando semplicemente un solo particolare (Vedi Allegati – Particolare n°3 -).
Figura 6 - 5: Un interessante confronto tra le dimensioni del bisturi meccatronico ed una mano. La sua ergonomia e il suo peso di soli 80 g potrebbero introdurre nuovi utilizzi per questo strumento.