6 Prove sperimentali
In questo capitolo verranno descritte le prove sperimentali effettuate nel corso del progetto; nel primo paragrafo parleremo dei risultati ottenuti testando l’algoritmo d’integrazione planare, descritto nel secondo capitolo, con l’ausilio della scheda d’acquisizione. Parleremo poi dei test effettuati sul dispositivo finale, commentandone i risultati.
6.1 Risultati d’integrazione planare
Riportiamo i risultati ottenuti durante il processo d’integrazione planare, monitorando dei brevi percorsi chiusi.
Il primo esperimento effettuato è stato quello di far compiere alla basetta con sopra l’accelerometro, vista in figura 2.3.1, un movimento composto da spostamenti lungo i singoli assi dell’accelerometro stesso.
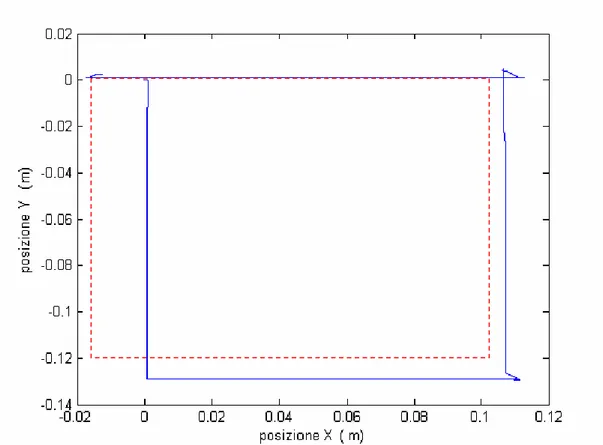
Nell’esempio in figura si è ad esempio fatto compiere un percorso a forma di quadrato di lato 12 cm, e si è applicato l’algoritmo d’integrazione planare ad ambo gli assi dell’accelerometro, ottenendo il seguente risultato:
Capitolo 6
Fig. 6.1.1 : monitoraggio di un percorso quadratico
Come si può vedere l’algoritmo ha generato un errore su ciascun lato, ed il quadrato è stato pertanto chiuso con un errore di circa 2 cm, ovvero del 5% su ogni lato. Tali errori sono dovuti alle non linearità introdotte nell’algoritmo, alla non perfetta ortogonalità del piano di lavoro rispetto al accelerazione gravitazionale, ed agli errori di montaggio dell’accelerometro sulla basetta.
Siamo quindi passati ad un movimento composto, eseguendo degli spostamenti traslazionali comprendenti ambo gli assi. Di seguito, ad esempio, è riportato uno spostamento di tipo trapezoidale, con base maggiore ed altezza di 12 cm, e base minore di 4 cm.
Fig.6.1.2 : monitoraggio di uno spostamento trapezioidale
Anche in tal caso l’errore commesso nella chiusura del percorso è di circa 2 cm, come nel caso precedente. Tali errori risultano comunque tollerabili, per i motivi già citati nel primo capitolo, infatti la forma dello spostamento è stata ben monitorata, e l’errore commesso sarà compensato dall’interazione dell’utente.
Possiamo pertanto concludere che l’algoritmo d’integrazione planare fa ottimamente il suo lavoro, e che un’eventuale estensione di tale algoritmo nel caso spaziale darebbe risultati eccellenti per quanto concerne la navigazione. Un eventuale sostituzione degli accelerometri usati, con dei dispositivi dotati di una maggiore accuratezza potrebbe diminuire ancor più l’errore, e renderne possibile l’utilizzo anche in applicazioni dove è richiesta una misura accurata della posizione (ad esempio in ambito medico).
Capitolo 6
6.2 Esperimenti di interazione in ambiente virtuale
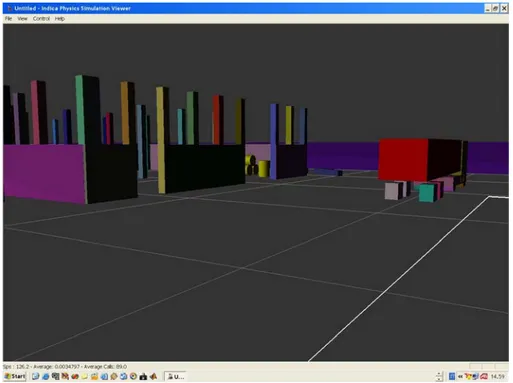
La navigazione è stata valutata sviluppando, in linguaggio C, un programma che simula un semplice ambiente virtuale di prova. Tale programma riceve in ingresso direttamente la posizione, e provvede ad aggiornare l’immagine in tempo reale, spostando la posizione dell’utente nella posizione ricevuta in ingresso. Tale ambiente appare come in figura:
Fig. 6.2.1: aspetto dell’ambiente virtuale di prova
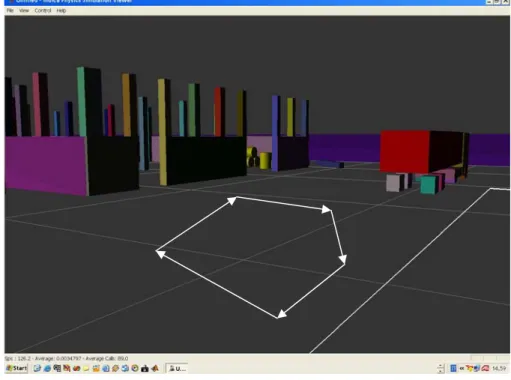
Ciò che si vuole ottenere è la possibilità di navigare in tale ambiente in maniera fluida, senza discontinuità nella visione della posizione, inclinando la testa in avanti ed indietro e lateralmente, oppure camminando. Abbiamo quindi stabilito un percorso in tale ambiente ed abbiamo chiesto a più utenti di provare a seguire il percorso indicato
Fig 6.2.2: il percorso stabilito all’interno dell’ambiente
Abbiamo quindi valutato gli errori commessi nel seguire il percorso, la facilità d’uso del dispositivo, e la presenza/assenza di sfarfallio in posizione ferma, in entrambe le modalità di navigazione.
6.3 Valutazione della modalità di navigazione statica
I risultati ottenuti durante la navigazione in modalità statica sono stati pienamente soddisfacenti: l’utente è stato in grado di seguire il percorso con errori minimi, ed ha navigato con estrema facilità ed intuitività nell’ambiente, non riscontrando problemi nella posizione ferma, dove tutte le rotazioni di tipo involontario sono trascurate. La separazione delle due direzioni di movimento è realizzata ottimamente, ovvero si ottiene che inclinando la testa in basso l’immagine si sposta solamente in avanti (e non lateralmente). Inoltre si è riscontrato, come da richieste iniziali, un aumento della velocità di spostamento, ad un aumento dell’inclinazione
Capitolo 6
6.4 Valutazione della modalità di navigazione dinamica
Per quanto concerne la modalità dinamica, abbiamo riscontrato qualche problema in più: nonostante le contromisure prese, l’utente riesce a percepire un certo ritardo (seppur breve) nell’aggiornamento dell’immagine, e problema più grave vi è il rischio che durante la lettura del movimento avvenga con il segno sbagliato se l’utente non ha particolare dimestichezza con l’uso degli occhiali. Tale problema nasce dal fatto che un utente poco esperto tende a far delle brusche rotazioni involontarie delle testa, nella fase di partenza, andando così a falsare la forma d’onda in ingresso alla macchina a stati vista nel paragrafo 3.4.3. Tale effetto può portare anche ad una cattiva separazione delle due direzioni di movimento, provocando un effetto visivo particolarmente sgradevole (l’utente si sposta in avanti e l’immagine scorre anche lateralmente).
Tali effetti comunque diminuiscono con l’aumento della padronanza d’uso del dispositivo, e sono pertanto accettabili.
Anche in questa modalità, nella posizione ferma tutte le rotazioni della testa involontarie sono trascurate, e non si sono riscontrati effetti di sfarfallio della posizione.