32
3
SIMULAZIONI IN AMBIENTE URBANOIn questo capitolo verrà descritta l’analisi della rugosità di piccola scala realizzata implementando in ambiente Fortran una subroutine [appendice A] che realizzi la tecnica descritta in [D1: 2.2].
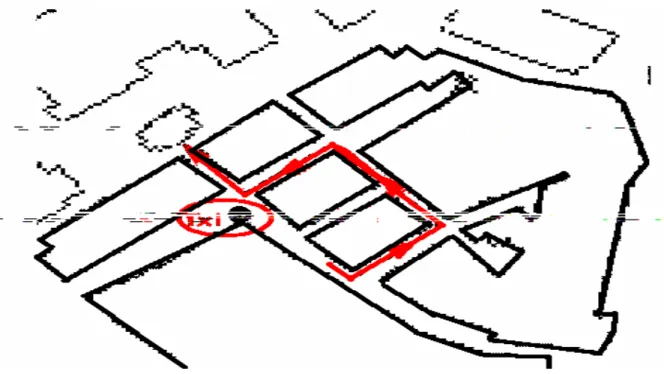
Questa sarà applicata ad un ambiente urbano che permetterà di confrontare i risultati ottenuti con le misurazioni presentate in [26]. L’articolo propone l’analisi, mediante tecnica a raggi, di una tipica area urbana nella città di Bristol (UK) (Figura 3.1), e mostra un confronto tra i valori di potenza misurati e quelli risultanti dalle simulazioni. L’obbiettivo è quello di controllare che l’andamento della potenza ottenuto con le simulazioni segua i reali dati misurati e verificare se l’integrazione delle variazioni dovute alla rugosità porti miglioramenti apprezzabili. Risultati e misurazioni presentati in [26] sono riferiti a tre diverse configurazioni in cui viene fatta variare la posizione del trasmettitore. Per quanto riguarda le nostre simulazioni è stato analizzato un solo caso: quello relativo alla posizione identificata nell’articolo come “Tx1”. Per quanto riguarda la posizione del ricevitore questa viene fatta variare su un percorso in modo da simulare il movimento di una automobile nel quartiere preso in considerazione (Figura 3.2).
Si riportano di seguito le specifiche che caratterizzeranno le simulazioni presentate in [26]:
• altezza dal suolo del trasmettitore 5 m; • altezza dal suolo dei ricevitori 1.57 m; • risoluzione spaziale della predizione 0.5 m;
• antenna utilizzata è un dipolo a λ/2 posizionato verticalmente; • frequenza di lavoro 1823 MHz;
• potenza trasmessa 30 dBm (1 W);
• caratteristiche elettriche degli pareti: εr =5,
1 0.005Sm
σ = −
33
Figura 3.1 Visualizzazione 3-D del quartiere oggetto delle simulazioni.
Figura 3.2 Posizione del trasmettitore e percorso su cui sono posti i ricevitori.
Per quanto riguarda la qualità dei risultati proposti va ricordato che è stato preso in considerazione il settimo ordine di riflessione e il secondo ordine di diffrazione. A causa dell’elevato tempo computazionale le nostre simulazioni avranno un ordine di riflessione decisamente minore. Le prime simulazioni sono state fatte confrontando contributi del terzo e del quarto ordine di riflessione: in entrambi i casi sono stati ottenuti i soliti risultati e quindi si
34
è deciso di procedere nelle simulazioni successive con il solo terzo ordine. Appare chiaro, quindi, come il confronto tra i dati proposti in [26] e i risultati si limiterà al confronto degli andamenti indicativi e all’analisi della variazione nel caso in cui si inserisca il controllo della rugosità.
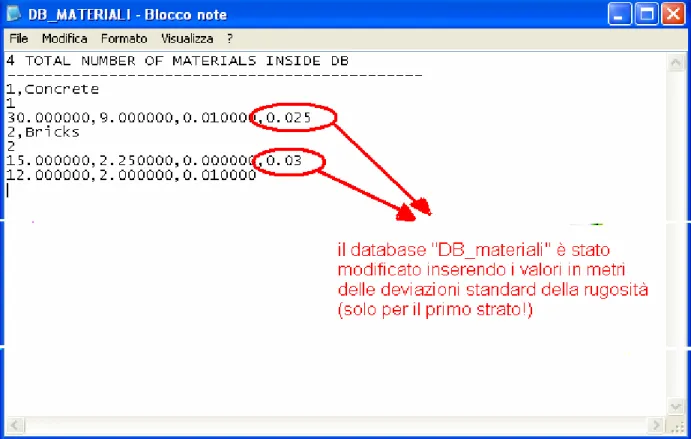
Rispetto alla precedente versione l’integrazione della subroutine presentata in [Appendice A] ha reso necessarie alcune modifiche ai file di ingresso. In particolare sono stati modificati il file DB_materiali, che contiene i dati relativi agli strati che costituiscono le piastre, e il file inputDATA, che contiene i logical flag e altri parametri.
Per quanto riguarda il primo (Figura 3.3) è stato inserito nel primo strato di ogni piastra il valore di deviazione standard della variabile aleatoria gaussiana che descrive l’andamento superficiale della rugosità. Per il secondo (Figura 3.4)è stato inserito, e posto true, il flag per il controllo della simulazione di rugosità da parte dell’utente.
35
Figura 3.4 Il file di ingresso inputDATA.
In Figura 3.5 Sono mostrati l’andamento di potenza misurato e quello simulato in [26] al variare della distanza del ricevitore dal trasmettitore: distanza espressa metri.
Figura 3.5 I risultati proposti in letteratura (valori di potenza misurati e calcolati con
Le simulazioni hanno analizzato due diversi modelli dal punto di vista della rugosità superficiale:
• deviazione standard pari a 0.01 m; • deviazione standard pari a 0.025 m.
Il primo modello è stato ricavato dai dati raccolti in [12, 13] e mostrati nella Tabella 2.2.1 [D1]. La deviazione standard dei mattoni presentata è pari a 0.5 cm mentre nelle nostre simulazioni si è scelto di considerare 1 cm perché si è pensato che questa configurazione schematizzasse al meglio le possibili situazioni reali.
Il secondo modello, invece, è nato dall’osservazione delle pareti esterne di comuni edifici. Nella realtà, infatti, nessun edificio è costituito da pareti esterne perfettamente piane: aumentando il valore che descrive la rugosità del materiale di costruzione si è pensato di schematizzare tutte quelle sporgenze che non vi sono incluse.
Title
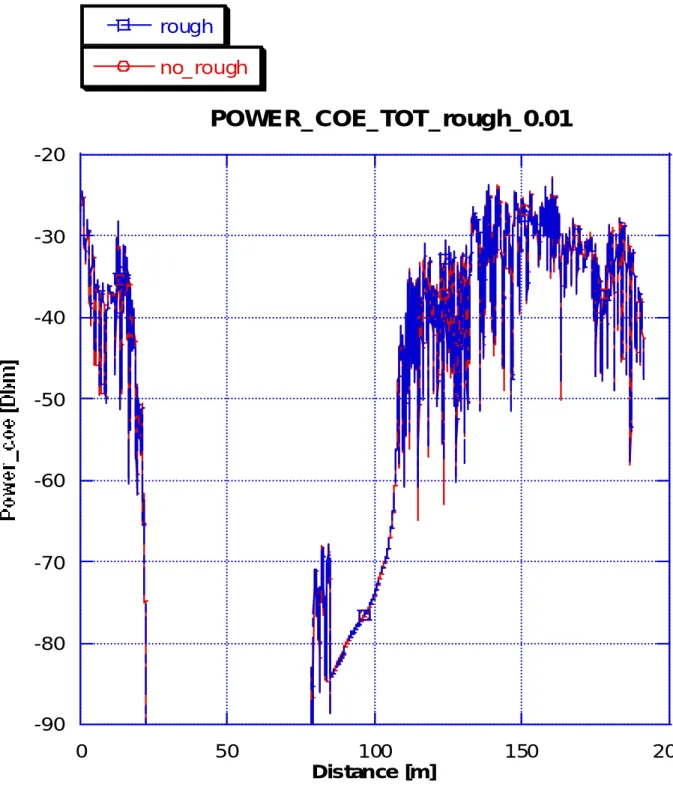
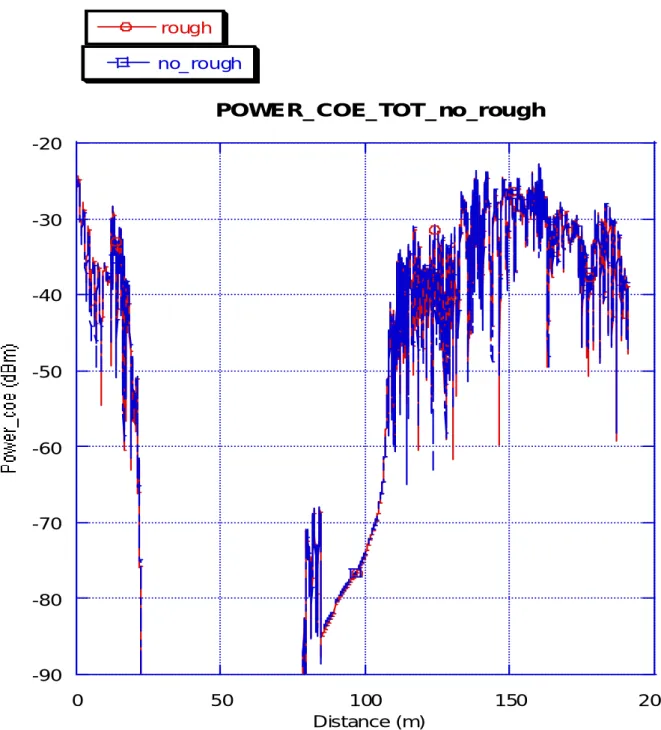
I risultati raccolti (Figura 3.6 e 3.7) non hanno mostrato variazioni di potenza apprezzabili con le simulazioni prive del controllo di rugosità.
Per verificare il corretto funzionamento della subroutine è stato inserito un controllo che segnala l’operazione: ogni volta che il coefficiente di riflessione viene modificato nella finestra di esecuzione appare la parola “PING” (Figura 3.8, 3.9). Il controllo ha mostrato che la funzione svolge la azioni correttamente.
1 -90 -80 -70 -60 -50 -40 -30 -20 0 50 00 150 200
POWER_COE_TOT_rough_0.01
rough no_rough Distance [m]Figura 3.6 Confronto della potenza ricevuta (al variare della distanza dal trasmettitore)
tra il caso senza e con rugosità (deviazione standard pari a 0.01 m).
38 -90 -80 -70 -60 -50 -40 -30 -20 0 50 100 150 200 POWER_COE_TOT_no_rough rough no_rough Distance (m)
Figura 3.7 Confronto della potenza ricevuta (al variare della distanza dal trasmettitore)
39
Figura 3.8 Parte di codice dove è inserito il comando per controllare la modifica del
coefficiente di riflessione.
Figura 3.9 Finestra di esecuzione.
La ragione dei risultati coincidenti, ottenuti dalle simulazioni in ambiente rugoso e da quelle prive del controllo di rugosità, va ricercata nel valore della frequenza di lavoro.
Per questo è stato eseguito un ulteriore controllo variando la frequenza delle simulazioni. Aumentando la frequenza di lavoro dovrebbero aumentare il numero dei coefficienti di riflessione che verificano il criterio di Fraunhofer, che quindi vengono
40
modificati, e dovrebbe diminuire il valore del coefficiente di correzione ρ . Si ricorda che il S coefficiente ρ assume valori compresi tra 0 e 1: S
• ρS =0: il coefficiente di riflessione da superficie liscia viene dimezzato;
• ρS =1: il coefficiente di riflessione da superficie liscia rimane esattamente invariato.
La Figura 3.10 mostra il confronto tra gli andamenti del coefficiente ρ ottenuto a S frequenza 1,8 GHz e 10 GHz considerando i primi 50 raggi che vengono riflessi. Si può notare come nel caso dei risultati ottenuti a 10 GHz, il coefficiente ρ sia minore di quello che si S otterrebbe simulando ad una frequenza di 1,8 GHz.
Figura 3.10 Andamento del coefficiente ρS per i primi 50 raggi riflessi confrontato per simulazioni a 1,8 GHz e 10 GHz.
In particolare sono state realizzate simulazioni alle frequenza di 10 GHz, per una rugosità caratterizzata da una deviazione standard di 0.025 m; tutte le altre specifiche sono rimaste invariate.
41 -90 -80 -70 -60 -50 -40 -30 0 50 100 150 2
POWER_COE_TOT_ROUGH0.025_FREQ10GHz
NO_ROUGH ROUGH Distance [m] 00Figura 3.11 Confronto della potenza ricevuta (al variare della distanza dal trasmettitore)
tra il caso senza e con rugosità (deviazione standard pari a 0.025 m) ad una frequenza di 10 GHz.
La Figura 3.11 mostra che aumentando la frequenza si inizia a vedere una variazione rispetto al caso di assenza del controllo di rugosità. In particolare ,circa intorno ai 160 m-170 m di distanza dal trasmettitore, si ha un salto anche di 10 dBm.
Inoltre, confrontando gli andamenti di Figura 3.6 e 3.7 con quello riportato in Figura 3.5, si nota che i nostri risultati presentano un vuoto di potenza per distanze tra i 30 m e gli 80 m circa. Questa discrepanza rispetto ai risultati presentati in [26] va attribuita al basso ordine
42
di riflessione delle nostre simulazioni, visto che le distanze in cui si presenta sono caratterizzate da un assenza di raggio diretto.
In conclusione possiamo dedurre che, per i valori di rugosità che caratterizzano gli ambienti urbani tipici, la modifica dei coefficienti di Fresnel [D1: 2.2] non porta, nelle bande GSM e UMTS, a variazioni apprezzabili dei livelli di potenza ricevuta.
Tuttavia si è deciso di inserire ugualmente la subroutine Roughness [Appendice A] in Emvironment in quanto, aumentando i valori di frequenza e deviazione standard della rugosità, si iniziano a registrare variazioni. Questa funzione, infatti, potrebbe risultare molto utile nel caso in cui la rugosità del terreno presentasse valori di deviazione standard significativi.