Capitolo 1:
VHF-DSC
Il mestiere di andare per mare è sempre stato pericoloso: le grandi distanze, la ovvia solitudine, l’estrema variabilità delle condizioni meteorologiche e la conseguente inospitalità dell’ambiente in cui un’imbarcazione si può ritrovare per periodi anche molto lunghi, hanno rappresentato uno stimolo allo sviluppo di sempre più efficienti tecniche di telecomunicazione. Non è quindi affatto sorprendente che le primissime scoperte riguardanti la radio, sin dalle intuizioni di Tesla, Marconi e Popov a cavallo tra ‘800 e ‘900, siano andate di pari passo con applicazioni nell’ambito delle comunicazioni marine. La necessità di utilizzare apparati di radiocomunicazione sulle navi ed in stazioni costiere, con lo scopo di rendere tempestivi gli aiuti in caso di pericolo o allarme, divenne drammaticamente chiara già in occasione dell’affondamento del Titanic nel 1912 [1]; nel 1914 una convenzione internazionale dell’IMO (International Maritime Organization) diede alla luce un primo documento che poneva sotto regolamentazione le procedure per una corretta sicurezza a bordo (i paesi dell’Impero Britannico avevano già provveduto due anni prima a definire dei regolamenti, tramite il “Commonwealth Navigation Act 1912”). Si ebbero delle successive modifiche nel 1929, ma è stato solo con la fondazione dell’ITU (International Telecommunications Union, 1932), attualmente agenzia ufficiale dell’ONU, che si è assistito ad una progressiva unificazione degli standard (risoluzioni del 1948, 1960, 1974), fino a giungere, con la collaborazione tra i due enti, alla definizione del GDMSS (Global Maritime Distress and Safety System), l’attuale sistema di comunicazione per la navigazione inserito nell’ambito delle procedure SOLAS (Safety Of Life At Sea), obbligatorio dal 1992 [2].
In questo capitolo si vedranno, dopo una sommaria descrizione del sistema GDMSS nel suo insieme, le caratteristiche specifiche degli apparati VHF-DSC, nell’ottica di un progetto SDR.
1.1 GMDSS
Il GMDSS è un sistema composito di apparati per le comunicazioni tra navi e tra queste e la costa. È costituito da numerose parti e diverse tecnologie, che vanno dalla satellitare a quella che sfrutta la propagazione in onde medie, corte e cortissime. Il suo scopo è fornire un mezzo robusto, efficiente e rapido per le comunicazioni di routine e di pericolo, per l’identificazione e per la localizzazione dei natanti. Emendato nel 1988, ha progressivamente sostituito i vecchi sistemi a partire dal 1992, per diventare globalmente effettivo nel 1999.
Dal punto di vista dell’utilizzatore, il sistema GMDSS rappresenta sicuramente una grande semplificazione: prima della sua entrata in vigore, le comunicazioni avvenivano tramite trasmissioni radiotelegrafiche, e richiedevano quindi la presenza di personale altamente specializzato; ora invece l’operatore, pur dovendo rispettare certi requisiti – deve possedere un certificato di idoneità (GOC – Certificato Generale di Operatore, ROC – Certificato Ristretto di Operatore [3]), rilasciato da appositi organismi (tipicamente la guardia costiera della nazionalità di appartenenza, in Italia il Ministero delle Comunicazioni) – non ha più la necessità di disporre di quel vasto bagaglio di conoscenze specifiche (ad esempio, una buona confidenza col codice Morse) che ha sempre caratterizzato i radiotelegrafisti.
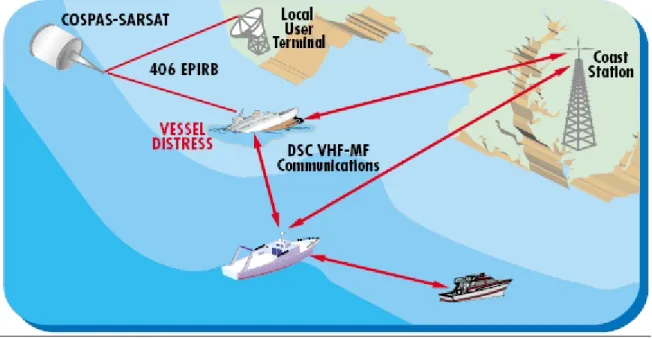
Il vero e proprio “pilastro” su cui poggia l’infrastruttura del GMDSS è costituito dal sistema DSC (Digital Selective Calling): questa tecnologia permette la trasmissione di segnali di soccorso contemporaneamente verso terra e verso le navi che si trovano in un raggio adeguato, consentendo così un’assistenza coordinata da appositi centri sulla costa e una maggiore efficienza e rapidità nelle operazioni di soccorso. L’operazione più immediata è l’allerta delle autorità costiere, che provvederanno a contattare ed attivare un Centro di Coordinamento al Salvataggio (MRCC); questi è deputato al coordinamento delle operazioni di ricerca e salvataggio (Search & Rescue), mentre le navi eventualmente in zona sono obbligate a prestare assistenza diretta partecipando alle operazioni [4] (figura 1.1).
Per poter ottemperare alle necessità previste dal sistema di soccorso, ogni nave deve essere in grado di espletare le seguenti funzioni:
• trasmissione di un segnale di soccorso nave-terra con almeno due mezzi separati ed indipendenti, usando differenti servizi di comunicazione
• ricezione di un segnale di soccorso terra-nave
• trasmissione e ricezione si segnali di soccorso nave-nave
• trasmissione e ricezione di comunicazioni inerenti il coordinamento delle operazioni di ricerca e salvataggio
• trasmissione e ricezione di comunicazioni durante le operazioni di ricerca e salvataggio • trasmissione e ricezione di segnali per il ritrovamento della posizione
• trasmissione e ricezione di informazioni marittime di sicurezza • trasmissione e ricezione di comunicazioni commerciali
• trasmissione e ricezione di comunicazioni “bridge to bridge”
Fig. 1.1: concetto di base del GMDSS
Le funzioni elencate vengono soddisfatte dalla presenza dei seguenti apparati di radiocomunicazione:
• sistema COSPAS-SARSAT utilizzante satelliti in orbita polare bassa • servizio mobile marittimo nella banda VHF (156-174 MHz)
• servizio mobile marittimo nella banda MF (1.6-4.0 MHz) • servizio mobile marittimo nella banda HF (4-27.5 MHz)
Agli apparati elencati ne vanno aggiunti altri per la radiolocalizzazione (GPS, DGPS, Decca, Loran, etc.). Dall’esistenza di apparati operanti su diversi range frequenziali (con diverse modalità di propagazione e di “visibilità” – si veda l’appendice 1.A) si evince che le navi devono essere equipaggiate non in funzione del tonnellaggio (come avveniva in precedenza), ma a seconda del campo di navigazione, che è stato classificato in aree [4]:
• A1: area dentro il raggio di copertura di una stazione costiera VHF dove è disponibile un ascolto continuo in DSC (tipicamente 20-30 miglia nautiche)
• A2: area, eccetto l’area A1, dentro il raggio di copertura di una stazione costiera MF dove è disponibile un ascolto continuo in DSC (tipicamente 100 miglia nautiche)
• A3: area, eccetto le aree A1 e A2, entro il raggio di copertura dei satelliti geostazionari INMARSAT e che assicura permanentemente la ricezione continua degli allarmi mediante DSC (approssimativamente tra i paralleli 70°N e 70°S)
• A4: una zona che esclude le zone A1, A2 e A3; tipicamente comprende le regioni polari, la cui copertura non è garantita dai satelliti geostazionari
Mentre le ultime due aree sono geograficamente ben definite, le aree A1 e A2 sono generalmente dimensionate dalle singole amministrazioni nazionali, in funzione del servizio DSC implementato. Si avranno quindi chiamate di emergenza:
• nelle aree A1, sul canale 70 del VHF, tramite DSC;
• nelle aree A2, chiamata a 2187.5 KHz tramite DSC, con indicazione di un’altra frequenza in fonia o telex per la trasmissione del messaggio;
• nelle aree A3 e A4, comunicazioni satellitari (INMARSAT A/B/C), trasmissione DSC in MF o HF, attività di EPIRB (Emergency Position Indicating Radio Beacons), a seconda del tipo di equipaggiamento a bordo e delle condizioni di propagazione.
È importante infine sottolineare che le imbarcazioni da diporto non sono obbligate a sottostare alle nuove normative GMDSS: i proprietari possono altresì decidere di installare a bordo le apparecchiature, ma in tal caso il comandante dovrà dotarsi di apposita abilitazione al loro utilizzo. Ovviamente, il rispetto della normativa è invece obbligatorio per tutte le navi da trasporto passeggeri e di tipo commerciale (container, da pesca, etc.) [5], [6].
1.1.1 Componenti del GMDSS
Il GMDSS non è quindi un sistema unico, quanto un sistema organico ed integrato di apparati e procedure; vediamo brevemente quali sono gli apparecchi che norme IMO prevedono e che scopi e funzionalità hanno.
1. COSPAS-SARSAT
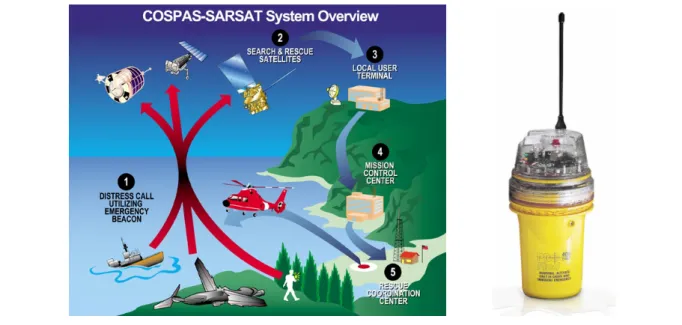
È un sistema satellitare per la rivelazione e la localizzazione di messaggi di emergenza, emessi da radioboe installate a bordo di vettori terrestri (PLB – Personal Locator Beacon), navali (EPIRB - Emergency Position Indicating Radio Beacon) o aerei (ELT - Emergency Locator Transmitter) in situazioni di pericolo. È nato da un accordo tra ex URSS, Stati Uniti, Francia e Canada (la prima parte della sigla è un acronimo russo che sta a significare “Sistema Spaziale per il Soccorso di Navi in Pericolo”).
Le radioboe EPIRB sono attivabili manualmente o automaticamente; la frequenza di lavoro è 406.025 MHz, l’autonomia è pari a 48 ore; l’installazione è obbligatoria per le imbarcazioni abilitate alla navigazione oltre 6 miglia dalla costa.
Fig. 1.3 - 1.4: funzionamento del sistema COSPAS-SARSAT; esempio di radioboa EPIRB
In figura 1.3 si può vedere il principio di funzionamento: in caso di necessità la radioboa emette un segnale contenente il codice MMSI (Maritime Mobile Service Identity, un codice identificativo univoco del natante in nove cifre – si veda l’appendice 1.C); una rete di sette satelliti (COSPAS-SARSAT) riceve il segnale e ricava la posizione, trasmettendo i dati ad un apposito centro sulla terraferma (LUT – Terminale ad Uso Locale) il quale, dopo una verifica tramite banca dati della veridicità della segnalazione, provvede ad attivare le procedure di soccorso. Il Terminale ad Uso Locale per l’Italia è posizionato presso la Guardia Costiera di Bari.
I satelliti attualmente utilizzati per questo sistema sono sette e sono divisi in due classi fondamentali: geostazionari (GEOSAR) e in orbita polare bassa (LEOSAR); nella configurazione minima per cui è stato concepito il sistema (costellazione di quattro satelliti LEOSAR), il tempo di attesa massimo di un oggetto, prima di entrare nel “campo visivo” di un satellite è minore di un’ora. Nel sistema attuale l’altitudine dei satelliti in orbita polare varia tra gli 800 e i 1000 km e la velocità è di circa 7 km/sec (un’orbita completa viene compiuta in circa 100 minuti) [7]. L’orbita non particolarmente elevata consente l’uso di potenze di trasmissione minori, una necessità evidente dovuta al fatto che gli EPIRB hanno un’autonomia limitata.
Fig. 1.5: satelliti del sistema COSPAS-SARSAT
2. NAVTEX
È un servizio dell’IMO/IHO World Wide Navigational Warnings Service; consiste in avvisi di sicurezza nautici e meteorologici sulla frequenza di 518 KHz, trasmessi in telegrafia a banda stretta con stampa diretta ed utilizzo della lingua inglese; ovviamente non è disponibile ovunque, è però obbligatorio avere un ricevitore per le zone coperte dal servizio. Il globo è diviso in diverse zone, ognuna delle quali ha una nazione di riferimento per la diffusione dei bollettini NAVTEX (ad esempio la zona cui appartiene l’Italia è gestita dalla Spagna). Ogni amministrazione può inoltre gestire un proprio servizio NAVTEX nazionale, con trasmissione sulla frequenza di 490KHz tramite telegrafia a banda stretta con stampa diretta ed utilizzo della lingua relativa alla nazione interessata. La trasmissione avviene da stazioni fisse ben definite (per l’Italia sono Trieste, Augusta, Cagliari, Roma) con un sistema a divisione di tempo per evitare le reciproche interferenze dovute ai ritardi di propagazione.
Ogni bollettino informativo è caratterizzato da due lettere, una che identifica la stazione trasmittente ed un’altra che indica il tipo di messaggio trasmesso (previsioni, meteo, ricerca e soccorso, messaggi di servizio per i piloti, etc.). I ricevitori automatici possono essere settati in modo da selezionare o escludere la stazione trasmittente ed i tipi di messaggio di interesse [8].
3. INMARSAT
La rete INMARSAT è un consorzio internazionale con sede a Londra, cui fanno parte 79 paesi, che fornisce copertura radio via satellite su scala mondiale. La rete è composta da 4 satelliti in orbita geostazionaria capaci di coprire la quasi totalità del globo, con esclusione delle zone polari.
Fig. 1.6: copertura dei satelliti nel sistema INMARSAT
Le comunicazioni via satellite avvengono su frequenze molto elevate (1,5-1,6 GHz) con antenne altamente direttive che consentono l'impiego di basse potenze. L'emissione non risente dei fenomeni atmosferici e le comunicazioni sono estremamente affidabili e riservate. L'utente digita il numero di una delle molte stazioni costiere terrene disponibili e ricevuto il tono di linea libera, compone il numero dell'utente terrestre o marittimo che desidera contattare.
Attualmente esistono 4 tipologie di servizio INMARSAT:
• INMARSAT-A: sistema analogico a banda larga (50 KHz); fornisce funzioni bidimensionali di fonia, telex, fax, posta elettronica e comunicazione dati; ha precise limitazioni in potenza trasmissiva e dimensioni dell’antenna, quindi viene gradualmente abbandonato in favore di sistemi più moderni;
• INMARSAT-B: sistema completamente digitale, operativo dal 1994; offre vari servizi a velocità di segnalazione variabile (es. fax @ 9.6 kbit/sec, dati @ 64 kbit/sec) la banda occupata è di circa 20 KHz (numero canali maggiore, minori tariffe);
• INMARSAT-C: è una versione di servizio più economica; fornisce comunicazione dati o telex digitale, tramite passaggio attraverso una stazione costiera terrestre, che provvederà (dopo aver chiuso il collegamento con chi trasmette per risparmiare) ad inoltrare il messaggio; se l’inoltro non è possibile, il mittente viene avvisato; opzionalmente, è possibile richiedere un messaggio di avvenuta ricezione;
• INMARSAT-M: fornisce comunicazioni telefoniche, fax e dati in forma numerica per mezzo di terminali piccoli ed economici, ad una velocità di 2400 bps.
4. SART
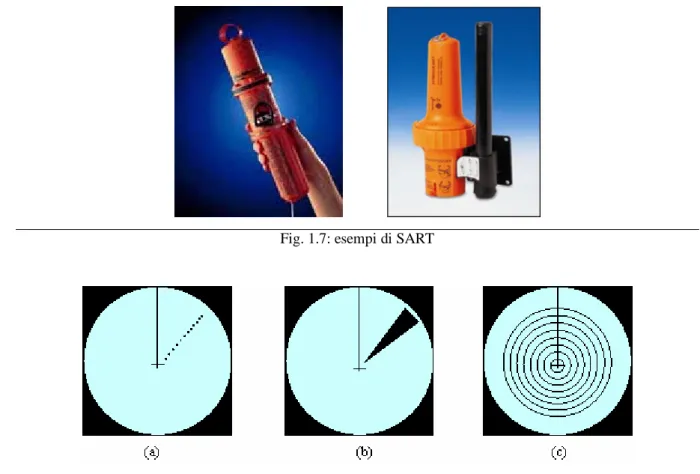
I SART (Search And Rescue Trasponder) sono dei trasponder radar portatili usati per trovare i sopravvissuti a disastri navali; operano nel range frequenziale dei radar di bordo di quasi tutte le navi, producendo, una volta attivato, un segnale che viene visualizzato sugli schermi radar come una linea di 12 puntini. Quando viene abbandonata una nave in seguito ad un incidente, il SART deve essere portato a bordo del mezzo di salvataggio [9].
Fig. 1.7: esempi di SART
Fig. 1.8: effetto di un SART sullo schermo radar a più di 5 miglia (a), tra 1 e 5 miglia (b), meno di 1 miglio (c)
5. DSC
Il DSC (Digital Selective Calling) è un sistema semiautomatico di trasmissione digitale, utilizzato per compiere chiamate radio a frequenze VHF, HF ed MF. Permette di inviare e ricevere chiamate da qualsiasi nave o stazione costiera dotata dell’equipaggiamento necessario. Le chiamate possono essere classificate come:
• Soccorso (distress) • Urgenza (urgency)
• Sicurezza (safety) • Routine
L’apparecchio seleziona automaticamente un canale attivo, ed in caso di segnale di tipo “distress” il messaggio viene inviato in automatico a tutte le stazioni nelle bande marittime preposte: per il VHF il canale 70 (156.525 MHz), per l’HF le frequenze a 4207.5, 6312, 8414.5, 12577 e 16804.5 KHz, per l’MF 2187.5 KHz.
Vediamo ora più nel dettaglio il VHF-DSC, dal momento che sarà l’oggetto specifico del nostro lavoro.
1.2 Il sistema VHF-DSC
L’utilizzo di radiotelefoni in media, alta ed altissima frequenza non è una novità, nel panorama delle comunicazioni marittime: ben prima dell’introduzione dell’attuale GMDSS molte imbarcazioni di vario tipo erano provviste a bordo di apparati per la trasmissione e ricezione audio con modulazioni d’angolo o SSB. Con l’adozione delle nuove normative a partire dal 1999 sono state però introdotte alcune modifiche e migliorie, quale ad esempio la riduzione della spaziatura di canale per la trasmissione in fonia (passati da 50 a 25 KHz); ma soprattutto è stato introdotto il Digital Selective Calling, di cui si vedranno le caratteristiche nei paragrafi a seguire.
1.2.1 Cenni alla normativa internazionale
La normativa internazionale cui si fa riferimento quando si parla di GMDSS è la convenzione “SOLAS 1974”, definita e pubblicata dall’IMO; la parte riguardante VHF e DSC è contenuta nel capitolo IV (“Radiocommunications”); i documenti più rilevanti tra quelli consultabili sono le risoluzioni IMO A.694, A.385, A.803. Vi sono poi innumerevoli documenti pubblicati dall’ITU (raccomandazioni ITU-R M.257, M.489), nonché dall’IEC (International Electrotechnical Commission) e dall’Istituto Europeo per gli Standard delle Telecomunicazioni (ETSI). L’Italia ha recepito la normativa tramite decreto legislativo pub –
Equipaggiamento imbarcazione Qualifica minima dell’operatore
Radiotelefono VHF (con o senza DSC)
• Restricted Radiotelephone Operators Certificate OPPURE
• 3rd Class Commercial Operators Certificate OPPURE
• Marine Radio Operators Certificate OPPURE
• Marine Radio Operators VHF Certificate
Radiotelefono VHF (con o senza DSC) + Radiotelefono MF/HF (con o senza DSC)
• Restricted Radiotelephone Operators Certificate OPPURE
• 3rd Class Commercial Operators Certificate OPPURE
• Marine Radio Operators Certificate
Radiotelefono VHF (con o senza DSC) + INMARSAT A/B/C
• Restricted Radiotelephone Operators Certificate of Proficiency with Marine Satellite Communications Endorsement
OPPURE
• 3rd Class Commercial Operators Certificate of Proficiency with Marine Satellite Communications Endorsement
OPPURE
• Marine Radio Operators Certificate of Proficiency with Marine Satellite Communications Endorsement OPPURE
• Marine Radio Operators VHF Certificate of Proficiency with Marine Satellite Communications Endorsement
Radiotelefono VHF (con o senza DSC) + Radiotelefono MF/HF (con o senza DSC) + INMARSAT B/C
• Restricted Radiotelephone Operators Certificate of Proficiency with Marine Satellite Communications Endorsement
OPPURE
• 3rd Class Commercial Operators Certificate of Proficiency with Marine Satellite Communications Endorsement
OPPURE
• Marine Radio Operators Certificate of Proficiency with Marine Satellite Communications Endorsement
Solo equipaggiamento INMARSAT
• Restricted Radiotelephone Operators Certificate of Proficiency with Marine Satellite Communications Endorsement
OPPURE
• 3rd Class Commercial Operators Certificate of Proficiency with Marine Satellite Communications Endorsement
OPPURE
• Marine Radio Operators Certificate of Proficiency with Marine Satellite Communications Endorsement OPPURE
• Marine Radio Operators VHF Certificate of Proficiency with Marine Satellite Communications Endorsement
blicato in Gazzetta Ufficiale n° 62 del 14 Marzo 1992 (allegato 53). Le normative, la cui applicazione è prevista obbligatoriamente per ogni imbarcazione varata dopo la data 1 Febbraio 1999, richiedono, tra le altre cose:
1. che ogni nave1 disponga di un impianto capace di trasmettere e ricevere tramite DSC sul canale 70 (156.525 MHz);
2. che ogni nave disponga di un impianto capace di trasmettere e ricevere sui canali 6, 13 e 16 (rispettivamente corrispondenti a 156.300 MHz, 156.650 MHz, 156.800 MHz);
3. che l’impianto installato per la comunicazione tramite DSC rispetti le specifiche tecniche descritte dalle raccomandazioni ITU-R M.493 e M.541, in particolare per quel che riguarda le classi caratterizzanti il tipo di dispositivo.
1.2.2 Classificazione degli apparecchi
Si elencano di seguito, in due distinte tabelle, le tipologie di apparecchi per la trasmissione e la ricezione di canali VHF: nella prima si vedranno dei requisiti in termini di potenza emessa, a seconda che l’apparato sia installato sulla costa, su nave, o sia portatile; la seconda tabella ha una classificazione più specifica, con annessi i nomi delle documentazioni internazionali consultabili per gli standard tecnici.
Stations Typical Power
Coast stations 100 W
Ship stations
Minimum: Maximum:
6 W
25 W (or 50 W if it can be remotely reduced by coast stations) Hand-held portable
transmitters
5 W Survival two-way
radiotelephones
Minimum e.i.r.p. of 0.25 watt. When this equipment provides for on-board communications, the output power should not exceed 1 watt on the on-board authorized frequencies. Tabella 1.2: requisiti in termini di potenza trasmessa [10]
1
Per “nave”, come visto in precedenza, si intendono tutte le imbarcazioni adibite al trasporto passeggeri, a scopi commerciali, e tutti i natanti che superino le 300 tonnellate di stazza; sono esentate dagli obblighi (ma non da
Tabella 1.3: tipologie di equipaggiamento VHF radio marittimo [10]
1.2.3 Specifiche Tecniche del VHF marittimo
Le specifiche tecniche delle normative internazionali assegnano alle trasmissioni radio marittime in VHF le frequenze comprese tra 156.000 e 162.500 MHz. Questa banda è stata suddivisa in canali di ampiezza pari a 25 KHz (in un primo momento la larghezza di banda era pari a 50 KHz), ognuno dei quali è identificato da un numero (da 1 a 28 e da 60 a 88). Fermo restando che alcuni di questi canali sono universalmente riservati a funzioni ben specifiche (il 16 alla chiamata ed al soccorso internazionali, il 70 al DSC), l’utilizzo dei restanti è lasciato all’arbitrio delle singole Amministrazioni nazionali (ad esempio si possono riscontrare le differenze tra assegnamenti statunitensi, canadesi ed italiani2). Oltre alla canalizzazione a 25 KHz, in alcune specifiche [10] si fa riferimento alla possibilità di implementare anche spaziature minori (12.5 KHz), purché gli apparati che le supportano siano compatibili con la spaziatura a 25 KHz. Per ulteriori specificazioni riguardo la canalizzazione, si faccia riferimento all’appendice 1.B.
Le caratteristiche di modulazione sono:
• classi di emissione G3E o F3E per i canali voce; • classi di emissione G2B o F1B per i canali DSC; • segnale irradiato in polarizzazione verticale;
• utilizzo, in trasmissione, di un filtro di preenfasi con pendenza di 6 dB/ottava (corrispondente a 20 dB/decade) tra 300 Hz e 3 KHz;
• utilizzo in ricezione di un filtro di deenfasi con pendenza (negativa) di 6 dB/ottava a partire da 300 Hz;
• massima deviazione di frequenza consentita (Δf) pari a 5 KHz; • banda del segnale audio modulante (BA) limitata a 3 KHz;
• banda necessaria nominale autorizzata per un canale voce: 16 KHz; • banda necessaria nominale autorizzata per un canale dati: 20 KHz.
Da questi primi requisiti possiamo già ricavare il valore dell’indice di modulazione β del sistema, pari a:
2
Si consultino, per eventuali confronti, la tabella posta in appendice 1.B, che fa riferimento alla legislazione italiana, e quelle visionabili agli indirizzi http://www.navcen.uscg.gov/marcomms/vhf.htm (per gli U.S.A.) e
5 1.67
BA 3
f
β @∆ = ≅ (1.1)
Da ciò deriva anche la banda teorica occupata a radiofrequenza, secondo la regola di Carson (si veda anche il paragrafo 1.3.2):
(
)
C
BRF ≅B @2⋅ β+ ⋅1 BA =16KHz (1.2)
che è compatibile con quanto richiesto dalle normative.
Ulteriori specifiche ([10], [11]) si hanno riguardo agli scostamenti ammessi rispetto ai valori nominali, alle derive di frequenza degli oscillatori ed alle maschere di emissione; eccone un breve elenco:
• la potenza trasmessa misurata non può discostarsi di più di 1 dB da quella dichiarata dal costruttore;
• la frequenza della portante a radiofrequenza deve rispettare, in termini di scostamento dal valore nominale, i limiti mostrati in tabella 1.4, e comunque la differenza tra frequenza misurata e frequenza nominale non può superare, in modulo, 1.5 KHz;
• le emissioni indesiderate (comprendenti emissioni fuori banda, spurie, armoniche) devono rispettare la seguente maschera:
o potenza dell’emissione misurata3 a frequenze (fmis) tali che
0 B B 2 RF mis RF f f
< − ≤ : almeno di 25 dB inferiore alla potenza utile;
o potenza dell’emissione misurata a frequenze tali che
0
BRF < fmis− f ≤2.5 B⋅ RF: almeno di 35 dB inferiore alla potenza utile;
o potenza dell’emissione a frequenze che si discostano dalla portante per più di 2.5⋅BRF: almeno di 43 10+ ⋅Log10(Putile) inferiore alla potenza utile;
o alternativamente, si può imporre che la potenza trasmessa su canale adiacente sia inferiore di almeno70 dB rispetto alla potenza della portante
• il filtro audio (frequenza di taglio 3 KHz) deve rispettare la seguente maschera:
o tra i 3 ed i 20 KHz, l’attenuazione, rispetto a quella che si ha a 1 KHz, deve valere almeno 60⋅Log10(fKHz/ 3)dB;
3
o oltre i 20 KHz, l’attenuazione deve superare di almeno 50 dB l’attenuazione valutata a 1 KHz.
Tabella 1.4: limiti alla differenza tra frequenza della portante misurata e nominale
1.2.4 Specifiche tecniche del DSC
La chiamata DSC, detta anche “DSC alert”, è un mezzo semiautomatico per stabilire un contatto iniziale tra stazioni radio, in seguito al quale si utilizzano le procedure standard del radiotelefono per proseguire la comunicazione sui canali VHF, HF o MF.
Un DSC alert è un burst di breve durata (tipicamente 7 secondi se trasmesso nella banda MF/HF e 500 millisecondi se trasmesso nella banda VHF) inviato da una stazione per allertare una o più stazioni fornendo inoltre alcune informazioni di base come l’identità della stazione chiamante e il motivo della chiamata. Come già accennato nei paragrafi precedenti, alla trasmissione dei burst DSC sono riservati appositi canali; quando viene ricevuto da una stazione radio, su di questa viene attivato un allarme sonoro e visivo per avvisare l’operatore, e in seguito viene visualizzato il contenuto del messaggio sotto forma di caratteri alfanumerici sul pannello frontale dell’apparecchio. La priorità del DSC alert può essere impostata manualmente dall’operatore, così come gli eventuali destinatari (quando non ci si rivolge a chiunque sia nel raggio di copertura del sistema). La semplicità dell’interfaccia permette di mandare messaggi di pericolo in maniera automatica tramite la semplice pressione continuata di un pulsante dedicato, senza dover attraversare la fase manuale di instaurazione e mantenimento di una comunicazione.
Vediamo ora gli aspetti più prettamente trasmessivi (per eventuali approfondimenti, si veda l’appendice 1.C):
• il sistema è sincrono e binario;
• i bit vengono trasmessi in gruppi di 10, includendo un codice a rivelazione di errore (7 bit di informazione + 3 di codice), per comporre 128 differenti caratteri, i primi 100 dei
quali (00-99) sono usati per codificare cifre decimali, mentre gli altri (100-127) sono usati per codificare comandi di servizio;
• esiste un sistema a diversità di tempo, come protezione ulteriore, consistente nella ri-trasmissione di un carattere di informazione (DX) una seconda volta (RX), allo scadere di un tempo di attesa corrispondente a 4 caratteri;
• la modulazione, a seconda che si stia comunicando in MF/HF o in VHF, varia come segue:
o MF/HF: modulazione FSK binaria, con banda 170 Hz e rate 100 Bd; segnale FSK costruito con una sottoportante audio a 1700 Hz e toni 1700±85 Hz; classe di emissione F1B o J2B;
o VHF: modulazione FSK binaria, con shift di frequenza tra 1300 e 2100 Hz, ottenuto modulando una sottoportante audio a 1700 Hz; rate di 1200 Bd; classe di emissione G2B o F1B; utilizzo in trasmissione di un filtro di preenfasi con pendenza 6 dB/ottava; indice di modulazione del segnale modulato a RF (β) pari a 2.0;
• tolleranza rispetto ai valori nominali:
o dei toni a 1300 e 2100 Hz: ±10 Hz; o dell’indice di modulazione: ±10%; o delle portanti a radiofrequenza: ±10 Hz;
• la frequenza più elevata corrisponde al bit 0 (che chiameremo “B”), mentre la più bassa corrisponde al bit 1 (che chiameremo “Y”)
Per ulteriori questioni riguardanti codifica, struttura dei DSC alert e procedure di invio/ricezione, si rimanda il lettore all’appendice 1.C. Rimangono solo alcune altre specificazioni da compiere riguardo alla conformità degli apparati che possono fregiarsi della designazione “S” (radiotelefoni VHF con i requisiti minimi per la conformità del DSC – si veda la tabella 1.3 del paragrafo 1.2.2); gli apparati VHF-DSC devono cioè:
• poter trasmettere e ricevere segnali di classe di emissione G2B sulla frequenza corrispondente al canale 70 (156.525 MHz);
• essere capaci di rilevare la presenza di segnali sul canale 70 (funzionalità dual watch); • inibire la trasmissione di chiamate (fatta eccezione di urgenze) quando il canale è già
• avere memoria per conservare il MMSI (Marine Mobile Service Identity); • avere un sistema di attivazione in due mosse distinte per l’invio di distress alert;
• essere capace, in caso di distress alert, di inviare la posizione aggiornata del natante (se connesso ad un sistema per il rilevamento automatico della posizione, ad es. un GPS).
Infine, i messaggi di distress alert devono avere le seguenti caratteristiche:
• tolleranza di frequenza massima pari a 10 ppm; • potenza di uscita di almeno 100 mW;
• polarizzazione verticale.
1.3 Le modulazioni usate
Nei paragrafi precedenti si sono viste le caratteristiche tecniche della trasmissione di messaggi DSC e della comunicazione in fonia; si sono viste anche alcune sigle particolari per definire le varie “classi di emissione”. Nei paragrafi che seguono ci proponiamo di spiegare il significato di tali sigle e di dare breve e concisa descrizione delle tecniche di modulazione del segnale utilizzate nei sistemi VHF-DSC.
1.3.1 Le classi di emissione
La classe d'emissione è l'insieme delle caratteristiche di una emissione (tipo di modulazione della portante principale, natura del segnale modulante, genere di informazione da trasmettere etc.). Ogni classe è designata da tre simboli fondamentali [13]:
1. un carattere alfabetico che indica il tipo di modulazione della portante principale:
N emissione di un'onda non modulata A doppia banda laterale (DSB)
H banda laterale unica con portante completa (SSB)
R banda laterale unica con portante ridotta o di livello variabile J banda laterale unica con portante soppressa
B bande laterali indipendenti C banda laterale residua
F modulazione di frequenza (FM) G modulazione di fase (PM)
D emissione la cui portante principale è modulata in ampiezza e in modulazione
angolare, sia simultaneamente, sia con una sequenza prestabilita
P treno d'impulsi non modulato K treno d'impulsi modulato in ampiezza
L treno d'impulsi modulato in larghezza/durata M treno d'impulsi modulato in posizione/fase
Q l'onda portante è modulata in modulazione angolare durante il periodo
dell'impulso
V combinazione di casi precedenti o prodotto con altri mezzi
W casi non previsti in precedenza, con combinazione di modulazioni in ampiezza,
in modulazione angolare o ad impulsi
X altri casi
2. un numero che indica la natura del segnale modulante:
0 assenza di segnale modulante
1 un solo canale contenente l'informazione quantificata o numerica, senza
l'impiego di una sotto portante modulante
2 un solo canale contenente l'informazione quantificata o numerica, con
l'impiego di una sotto portante modulante
3 un solo canale contenente l'informazione analogica
7 due o più canali contenenti l'informazione quantificata o numerica 8 due o più canali contenenti l'informazione analogica
9 sistema composito con uno o più canali contenenti l'informazione quantificata
o numerica e uno o più canali contenenti l'informazione analogica
X altri casi
3. un carattere alfabetico che indica il tipo d'informazione da trasmettere:
N nessuna informazione
B telegrafia per ricezione automatica C fac-simile
D trasmissione dati, telemisura, telecomando E telefonia (ivi compresa la radiodiffusione sonora) F televisione (video)
W combinazione di casi precedenti X altri casi
Nei paragrafi precedenti si sono viste le seguenti sigle:
• G3E: fonia in modulazione di fase • F3E: fonia di modulazione di frequenza
• J2B: telegrafia per ricezione automatica in banda laterale unica con portante soppressa (DSC, solo nelle bande MF/HF)
• G2B: telegrafia per ricezione automatica in modulazione di fase; impiego di una sottoportante modulante
• F1B: telegrafia in modulazione di frequenza con ricezione automatica, senza sottoportante modulante
1.3.2 La modulazione FM
La modulazione usata per trasmettere i segnali in fonia, nonché i segnali numerici codificati per il DSC, è la modulazione FM (Frequency Modulation).
Un segnale FM è un segnale modulato d’angolo, ed assume la forma:
[
]
0 0
( ) cos 2 ( )
x t =A π f t+ϑ t (1.3)
essendo la deviazione di fase (istantanea) ( )ϑ : t
( ) 2 ( ) t F t k a d ϑ π τ τ −∞ =
∫
(1.4)con a(τ) segnale modulante e kF costante di modulazione di frequenza.
Detto in termini semplicistici, un segnale modulato FM è una sinusoide, la cui
frequenza istantanea è proporzionale, a meno di una costante data dalla portante di lavoro f0,
all’ampiezza del segnale modulante: l’informazione che si vuole trasmettere è “nascosta” nell’andamento della frequenza della sinusoide che si trasmette.
Gli utilizzi di questo tipo di modulazione sono innumerevoli (basti pensare alle radio commerciali), e praticamente sterminata è la bibliografia al riguardo. Non ritenendo che sia questo il luogo appropriato per una analisi approfondita delle peculiarità di una modulazione FM, si rimanda chi è interessato ai testi citati in bibliografia ([14], [15]), procedendo nel contempo ad una rapida elencazione delle quantità caratteristiche viste finora.
Fig. 1.10: esempio di segnale modulato FM
Un parametro importante per definire le caratteristiche di una modulazione di frequenza è la massima deviazione di frequenza (Δf), definita come:
( )
{
}
1( )
max max 2 d t f f t t ϑ π ∂ ∆ = ⋅ ∂ @ (1.5)Dopo alcuni semplicissimi passaggi matematici, si ricava che la massima deviazione di frequenza è direttamente proporzionale al valore di picco assunto dal segnale modulante:
F M
f k a
∆ = ⋅ (1.6)
Un ultimo parametro visto nelle specifiche è l’indice di modulazione, definito come:
B B F M A A k a f β @ ∆ = ⋅ (1.7)
A differenza delle modulazioni di ampiezza (lineari), in cui una variazione di ampiezza del segnale modulante si traduce in una semplice variazione proporzionale dello spettro di ampiezza, senza incidere sulla banda, nelle modulazioni d’angolo una variazione di ampiezza produce un cambiamento della banda occupata: ciò è dovuto alla non linearità della modulazione. In generale il calcolo della banda occupata da un segnale FM è molto complicato, anche nel caso più semplice di segnale modulante sinusoidale o comunque periodico (si veda la figura 1.11). Basti quindi considerare, ai fini del calcolo della banda occupata, la regola di Carson:
C
B @2⋅∆ + ⋅f 2 BA (1.8)
ovvero, tramite semplici passaggi matematici:
C
B = ⋅2 (β+ ⋅1) BA, (1.9)
con BA banda del segnale modulante.
D’ora in poi, quando si farà riferimento alla banda occupata a radiofrequenza da un segnale modulato FM, ci si riferirà quindi alla Banda di Carson (BC), che generalmente indica
l’intervallo di frequenze in cui è concentrata la maggior parte della potenza di segnale (98-99%).
Fig. 1.11: (a) spettro di un segnale FM (b) funzioni di Bessel
Esistono innumerevoli modi per demodulare un segnale FM, ovverosia per misurare la frequenza istantanea del segnale ricevuto; i più semplici (e più diffusi) consistono (a) nel conteggio degli attraversamenti per lo zero del segnale, (b) nel derivarlo e porre in cascata un
rivelatore di inviluppo, (c) nell’utilizzo di un anello ad aggancio di fase (PLL, Phase Locked
Loop). In caso di utilizzo di un derivatore, si rende necessario l’utilizzo di un sistema di deenfasi (attenuazione delle frequenze più elevate), cui deve essere associato un filtro di preenfasi in trasmissione, allo scopo di migliorare il rapporto segnale-rumore [14].
1.3.3 La modulazione FSK
La FSK (Frequency Shift Keying) è una modulazione d’angolo numerica che viene utilizzata nella trasmissione dei burst DSC, generando dei segnali in banda audio. Tali segnali vengono poi inviati a radiofrequenza utilizzando un’ulteriore modulazione (in questo caso analogica), che può essere la SSB (solo per le frequenze MF/HF, e comunque sta cadendo sempre più in disuso) oppure la FM (prevista per entrambi i range di utilizzo del sistema DSC, MF/HF e VHF).
La modulazione FSK consiste nell’associare a diversi simboli logici frequenze differenti (nel caso di trasmissioni binarie, cui faremo da ora in poi riferimento, si hanno due sole frequenze trasmesse): si ha così una sorta di sinusoide la cui frequenza istantanea varia in maniera discreta.
Il metodo più semplice per generare un segnale FSK è quello di far commutare l’uscita del trasmettitore tra due oscillatori indipendenti con frequenze diverse. In questo modo il segnale di uscita presenta delle discontinuità aleatorie agli istanti di commutazione (FSK a fase discontinua), assumendo la forma:
C 1 1 1
C C
C 2 2 2
cos(2 ) simbolo trasmesso = b
cos[2 ( )]
cos(2 ) simbolo trasmesso = b
FSK A f t s A f t t A f t π θ π ϑ π θ + → = + = + → (1.10)
Questo tipo di segnalazione è ormai obsoleto, in quanto la presenza di discontinuità peggiora l’efficienza spettrale. Attualmente il tipo di modulazione più in uso prende il nome di CP-FSK (Continuous Phase FSK), ottenuta inviando ad un modulatore di frequenza direttamente i simboli di sorgente opportunamente sagomati (ad esempio un treno di impulsi rettangolari di durata T e di ampiezza ±1). Chiamando m(t) il segnale costituito dai simboli di sorgente, si ottiene così all’uscita del trasmettitore un’espressione di questo tipo:
C C ( ) cos(2 2 t ( ) ) FSK F s t A π f t πk mτ τd −∞ = +
∫
(1.11)che come si vede ha forma identica a quanto visto in (1.3)-(1.4). In figura 1.13 si può vedere un esempio di segnale FSK generato con matlab.
Fig. 1.13: esempio di segnale FSK (caratteristiche di modulazione del DSC, simulato tramite matlab)
La scelta delle caratteristiche di un modulatore FSK deve essere compiuta nell’ottica di realizzazione del migliore compromesso possibile tra quattro esigenze differenti [16]:
• limitare l’occupazione di banda (à avvicinare i toni);
• separare le due frequenze per evitare interferenza intersimbolica (à allontanare i toni); • mantenere il periodo relativo delle due sinusoidi minore o uguale al tempo di bit T; • mantenere la continuità di fase per limitare l’occupazione spettrale.
La distanza quadratica tra due distinti segnali di una FSK binaria è data da ([17], [18]):
{ }
T 2 2 1,2 1 2 1,2 0 ( ) ( ) 2 T (1- ) d @∫
s t% −s t% dt = ⋅ ⋅ ℜ ρ , (1.12)dove
ρ
1,2 è il coefficiente di correlazione tra il segnale trasmesso in caso di simbolo b1 equello trasmesso in caso di simbolo b2:
1 2 2 T ( ) 1,2 d
sinc(2
T)
j f j de
θ θe
πf
ρ
=
−⋅
⋅
(1.13) dove: θ1-θ2 = differenza di fase iniziale dei due segnali (0 nel caso di CP-FSK);fd = deviazione di frequenza (f2-f1)/2 = Δf/2; T = tempo di simbolo.
Rendendo nullo tale coefficiente (o meglio, annullando la sua parte reale), il sistema FSK sarà detto ortogonale; in caso di CP-FSK, sarà sufficiente (essendo il primo esponenziale già pari a 1 per definizione di CP) rendere immaginario puro il secondo esponenziale, imponendo: 2 T= 2 d f π n π + π (1.14)
Considerando anche i valori di fd che annullano il termine sinc(.), si ottiene la seguente condizione di ortogonalità per la modulazione CP-FSK:
1 1 , , ..., 4T 2T 4T d n f = (1.15)
In realtà in molte applicazioni pratiche non si cerca di ottenere l’ortogonalità, ma si dimensionano appositamente i parametri di modulazione per ottenere un coefficiente di correlazione non nullo. Dopo alcuni semplici passaggi matematici, per la cui consultazione si rinvia alla bibliografia [19] per esigenze di spazio, si ottiene il valore di fd che minimizza la correlazione tra i due toni di segnalazione, e cioè:
0.7151 2 T
d
f =
⋅ , (1.16)
Fig. 1.14: correlazione tra i due toni FSK
Come nel caso della modulazione analogica FM, il calcolo dello spettro occupato risulta alquanto difficoltoso. Il caso più semplice è quello in cui viene trasmessa una sequenza periodica di bit 0-1 alternati [15]; la densità spettrale di potenza, in tale esempio, assume espressione data dalla formula:
* 1 ( ) ( ) ( ) 2 c c S f = G f − f +G − −f f , (1.17) con: ( ) n n b n G f c f T δ +∞ =−∞ = −
∑
, (1.18) e: 2 2 1 sinc ( 1) sinc 2 2 2 n d b d b n f T n f T n c = − + − + (1.19)In termini di occupazione di banda, si può fare sempre riferimento alla regola di Carson (1.8 – 1.9). In figura 1.15 si può vedere lo spettro teorico di un segnale FSK corrispondente ad una trasmissione periodica di bit 0-1, le cui caratteristiche di modulazione sono date dalle specifiche DSC (spettro calcolato e graficato tramite matlab). In figura 1.16 si
hanno invece grafici differenti corrispondenti a diversi segnali FSK con vari indici di modulazione h, essendo: 2 d b f h f T R ∆ = @ (1.20)
Fig. 1.15: spettro (teorico) di una FSK Fig.1.16: densità spettrale di potenza dell’inviluppo complesso di un segnale FSK al variare di h
Il ricevitore per segnali FSK può essere implementato in innumerevoli maniere differenti; sinteticamente, in questa sede si dirà solo che tra le più significative vi sono: (a) la ricezione coerente, che altro non è che un demodulatore a correlazione (ricevitore ottimo in caso di CP-FSK ortogonale), e (b) la ricezione non coerente, ottima solo in caso di FSK discontinua, ma di più semplice ed immediata implementazione al prezzo di un marginale peggioramento della probabilità di errore -
0
b
E Q N
nel primo caso,
0 (1 2) ( ) 1 2 b E N e− ⋅ nel secondo ([15], [17]).
Fig. 1.18: due differenti implementazioni di ricevitore non coerente
1.4 Un esempio di ricetrasmettitore VHF
Si vedranno di seguito, a titolo di esempio, alcuni schemi e caratteristiche di un ricevitore VHF commerciale; il prodotto in questione è il “RAY210 VHF”, prodotto dalla Raymarine [20].
Fig. 1.20: Raymarine RAY210 VHF
Il RAY210 VHF è un radiotelefono marino per le comunicazioni simplex e duplex (con divisione di frequenza) tra le navi o tra queste e le stazioni costiere; è inoltre programmato per la ricezione dei canali di informazione meteo e per l’utilizzo dei canali di soccorso internazionali. Tra le varie funzionalità disponibili, si evidenziano la possibilità di selezionare quattro differenti modalità di scansione automatica dei canali (tutti i canali, solo alcuni arbitrariamente impostati dall’utente, i canali di sicurezza e soccorso più quello meteo, oppure i canali di sicurezza e soccorso più uno qualsiasi impostato dall’utente). Prima di visualizzare gli schemi a blocchi di trasmissione e ricezione, diamo uno sguardo rapido alle specifiche tecniche:
• Trasmettitore
o 51 canali disponibili
o Errore massimo di frequenza: 5 ppm o Spaziatura di canale: 25 KHz
o Potenza di uscita: 25 W /1 W o Modulazione FM
o Distorsione audio: minore del 10% a 1 KHz
o Segnali spuri ed armoniche: potenza minore della potenza della portante di almeno 70 dB
o Impedenza d’antenna: 50 Ω • Ricevitore
o 93 canali disponibili
o Range di frequenza: da 156.025 a 163.275, con incrementi di 25 KHz o Errore massimo di frequenza: 5 ppm
o Sensitività: 0.3 µV
o Attenuazione di canali adiacenti, frequenze immagine, prodotti spuri e di intermodulazione: maggiore di 70 dB
o Uscita audio: 4 W @ 4 Ω, con distorsione inferiore a 10% • Altro
o Alimentazione a 13.6 Vdc (tolleranza del 15%) e 5.5 A (@ 25 W di potenza trasmessa) o 1.3 A (@ 1 W di potenza trasmessa)
o Temperatura di funzionamento: da -20°C a +50°C
Vediamo ora il diagramma a blocchi, diviso in due parti: sezione a RF (fig. 1.20) e sezione della CPU (fig. 1.21).
Nelle figure sono numerati i blocchi di maggiore interesse, coinvolti nei procedimenti di trasmissione e ricezione del segnale. Vediamoli un po’ più da vicino:
(1) punto di connessione del cavo proveniente dall’antenna (consigliato un dipolo a λ/2); (2) accoppiatore direzionale, che permette il monitoraggio delle potenze incidenti
sull’antenna in trasmissione ed in ricezione;
(3) circuito di commutazione (serve a separare i componenti usati per la ricezione da
quelli utilizzati in trasmissione), costituito, tra le altre cose, da un filtro LP e da due diodi pin;
(4) qui inizia il circuito di ricezione vero e proprio: sono due amplificatori a RF posti in
cascata;
(5) primo mixer, a cui arriva l’oscillazione proveniente dal PLL (6), per una conversione
ad una frequenza intermedia pari a 21.6 MHz;
(6) PLL, usato come sintetizzatore di frequenza (sia in trasmissione che in ricezione); (7) filtro e amplificatore a frequenza intermedia;
(8) blocco per la conversione ad una seconda frequenza intermedia pari a 455 KHz,
costituito da: un oscillatore locale al cristallo a 21.145 MHz, un mixer, un filtro ceramico per la rimozione di segnali indesiderati;
(9) una cascata di un circuito integrato ed un filtro ceramico per la demodulazione di
frequenza;
(10) filtro LP, comprensivo di filtro di deenfasi (-6 dB/ottava), la cui uscita è il segnale
audio;
(11) circuito per le funzioni di “squelch”;
(12) segnale audio in uscita, inviato alla sezione CPU; (13) circuito di trasmissione: limitatore di ampiezza; (14) filtro LP per l’eliminazione delle armoniche;
(15) uscita del PLL: segnale modulato FM e traslato alla frequenza di trasmissione
(controllo del PLL tramite CPU, attivazione mediante la pressione del pulsante “push-to-talk”);
(16) insieme di tre amplificatori in cascata;
(17) amplificatore di potenza, porta il segnale all’amplificazione desiderata;
(18) insieme di blocchi: uno rilevare la potenza emessa, confrontandola con quella
emettere (1W/25W); un altro riceve un segnale dalla CPU con l’indicazione se si è in trasmissione o ricezione; infine un blocco invia un feedback di informazioni alla CPU medesima;
(19) (inizio numerazione scheda CPU) segnale audio in arrivo dal blocco a RF; (20) amplificatore a bassa frequenza;
(21) potenziometro per la regolazione del volume;
(22) segnale di “mute”, proveniente dalla CPU, che elabora le informazioni del circuito di
squelch (11);
(23) amplificatore di potenza che pilota l’altoparlante; (24) altoparlante;
(25) ingresso del microfono;
(26) amplificatore e filtro audio più deenfasi (300Hz-3KHz, 6 dB/ottava): il segnale audio
Appendici
1.A Cenni riguardo alla propagazione radio
BANDA CARATTERISTICA DI PROPAGAZIONE SERVIZIO
VLF
3-30 KHz
Propagazione a guida d'onda tra superficie terrestre e ionosfera (Strati D ed E). Grande portata con scarsissima attenuazione. Penetrazione subacquea (qualche metro). Antenne di notevoli dimensioni. Sensibilità ai disturbi atmosferici.
- Omega
LF
30-300 KHz
Propagazione per onda di superficie. Onda di spazio presente di notte. Possibili interferenze tra onda di spazio ed onda di superficie. Media sensibilità ai disturbi atmosferici. Portata variabile, anche superiore alle 1000 miglia.
- Loran C - Decca - Radiofari
MF
300-3000 KHz
Propagazione per onda di superficie con portata inversamente proporzionale alla frequenza. Onda ionosferica assorbita di giorno dallo strato D e riflessa di notte dagli strati E ed F. Interferenze tra onde di spazio e onda di superficie con lente evanescenze. Scarsa sensibilità ai disturbi atmosferici. Portata variabile a seconda del tipo di antenna, del traffico, dell'ora e della stagione.
- Radiofari - Com. Marittime
HF
3-30 MHz
Onda di superficie sempre più attenuata al crescere della frequenza. Propagazione per onda di spazio con eccellente riflessione ionosferica (strati E ed F). Assorbimento ionosferico diurno (Strato D). Portata anche mondiale con scarsi disturbi atmosferici.
- Com. Marittime
VHF
30-300 MHz
Propagazione per onda diretta con sporadica onda di spazio. Onda di superficie inesistente. Portata poco più che ottica. Scarsissimi disturbi atmosferici. - Com. Marittime - Sistemi di Radio-posizionamento UHF 300-3000 MHz
Propagazione per onda diretta con penetrazione attraverso la ionosfera. Portata illimitata nello spazio. Immune da disturbi atmosferici. Notevole direttività. - Sistemi Satellitari - Transit - Gps - Inmarsat SHF 3-30 GHz
Propagazione per onda diretta. Possibili onde riflesse di terra. Riflessione sugli ostacoli. Assorbimento atmosferico. Notevole direttività.
- Radar
EHF
30-300 GHz
Propagazione per onda diretta. Forte
assorbimento atmosferico.
Fig. 1.23: principali modelli di propagazione
Fig. 1.24: gli strati della ionosfera
Strato ionosferico Quota
D 50 – 90 km E 90 – 140 km 140 – 220 km F1 F2 220 – 2000 km ES 120 km (sporadico)
Tabella 1.6: gli strati della ionosfera
Per approfondimenti si rinvia il lettore alla letteratura specializzata (esistono innumerevoli pubblicazioni; si segnalano tra le altre: Mimmo Martinucci, “Elementi di propagazione ionosferica”, edizioni C&C; Laura Lauro Taroni, “La fisica delle Telecomunicazioni”, scaricabile gratuitamente da http://www.torinoscienza.it; Aldo Paraboni, Michele D’Amico, “Radiopropagazione”, McGraw-Hill).
1.B Canali marittimi VHF
Canale Duplex TX (MHz) RX (MHz) Note
1 x 156.050 160.650
2 x 156.100 160.700
3 x 156.150 160.750
4 x 156.200 160.800
5 x 156.250 160.850
Corrispondenza pubblica ed operazioni portuali
6 - 156.300 Sicurezza nave-nave
7 x 156.350 160.950 Corrispondenza pubblica ed operazioni portuali 8 - 156.400 Commerciale nave-nave 9 - 156.450 10 - 156.500 Nave-nave 11 - 156.550 12 - 156.600 Operazioni portuali
13 - 156.650 Sicurezza nave-nave in navigazione
14 - 156.700 Operazioni portuali
15 - 156.750 Nave-nave e operazioni portuali
16 - 156.800 CHIAMATA E SOCCORSO
INTERNAZIONALI
17 - 156.850 Nave-nave e operazioni portuali
18 x 156.900 161.500 19 x 156.950 161.550 20 x 156.700 161.600 21 x 157.050 22 x 157.100 161.700 Operazioni portuali 23 x 157.150 24 x 157.200 161.800 25 x 157.250 161.850 26 x 157.300 161.900 27 x 157.350 161.950 28 x 157.400 162.000 Corrispondenza pubblica - - 156.550 160.700 Navigazione sul Po 60 x 156.025 160.625 61 x 156.075 160.675 62 x 156.125 160.725 63 x 156.175 160.775 64 x 156.225 160.825 65 x 156.275 160.875 Corrispondenza pubblica
66 x 156.325 160.925 Corrispondenza pubblica e operazioni portuali
67 - 156.375 Nave-nave
68 - 156.425
69 - 156.475 Operazioni portuali
70 - 156.525 DSC
71 - 156.575 Operazioni portuali, non commerciale
72 - 156.625 Nave-nave, non commerciale
73 - 156.675
74 - 156.725 Operazioni portuali
77 - 156.875 Nave-nave
78 x 156.925 161.525 Corrispondenza pubblica e operazioni portuali
80 x 157.025 161.625
81 x 157.075 161.675
82 x 157.125 161.725
Corrispondenza pubblica e operazioni portuali 83 x 157.175 161.775 84 x 157.225 161.825 85 x 157.275 161.875 86 x 157.325 161.925 87 x 157.375 161.975 88 x 157.425 162.025 Corrispondenza pubblica
Tabella 1.7: canali marittimi VHF con loro uso in Italia
1.C Riferimenti alla normativa ITU-R M. 493-11
Fig. 1.25: codifica dei numeri
Tabella 1.9 (continuazione)
Fig. 1.26: formato di una sequenza
Significato dei campi mostrati in figura 1.26:
• Dot pattern: alternanza di bit 0-1, necessari a sincronizzazione e (soprattutto) alla scansione da parte di chi monitora le frequenze;
• Phasing sequence: necessaria ad un corretto allineamento di bit e di trama (si veda anche la figura 1.27);
• Format Specifier: (1 carattere) specifica il formato della chiamata (Distress Alert, All Ships Call, Selective Call To a Group Of Ships, Selective Call To an Individual Station, Selective Call To a Group Of Ships in a Geographical Area, Semiautomatic or Automatic Service);
• Address: (5 caratteri) indirizzo del destinatario (non usato nel caso di “Distress Alert” o “All Ships Call”);
• Category: (1 carattere) identifica 4 gradi di priorità (Routine, Safety, Urgency, Distress); • Self-Identification: (5 caratteri) identifica il chiamante;
• Messages: a seconda del tipo i messaggio, sono costruiti in maniera differente; o Distress Alert: 4 campi per dare ulteriori specificazioni
§ Nature of Distress § Distress Coordinates § Time Indication
§ Type of Communication preferred
o Distress Relay, Distress Relay ACK, Distress ACK: 5 campi § MMSI della nave in pericolo
§ Nature of Distress § Distress Coordinates § Time Indication
§ Type of Communication preferred
o Altri tipi di chiamate: i messaggi devono seguire il seguente ordine: § Telecommand Information (vedere tabella 1.9)
§ Channel or Frequency Message (per continuare la comunicazione su altri canali)
§ Public Switched Network Number (quando presente) • Closing Sequence: composto da due campi distinti
o End Of Sequence: 1 carattere; indica anche se è richiesto ACK o meno;
o Error Check Character: 1 carattere i cui 7 bit di informazione sono bit di parità verticale (sono esclusi i caratteri RX, i caratteri di phasing e la sincronizzazione.
Riferimenti bibliografici
[1] U.S. Coast Guard, “An Overview of the Global Maritime Distress & Safety System”,
http://www.navcen.uscg.gov/.
[2] Canadian Coast Guard, “Information for the Fisherman and Recreational Boaters”,
http://www.ccg-gcc.gc.ca/main_e.htm.
[3] Ministero delle Comunicazioni - Ispettorato Territoriale Lazio,
http://www.mincomisplazio.it/.
[4] United Safe Boating Institute, “GMDSS Brochure”, http://www.usbi.org/.
[5] Australian Maritime College, “Marine Radio Operators Handbook”, 2002.
[6] http://www.yachts.it.
[7] “Introduction to the COSPAS-SARSAT System”, 1999, http://www.cospas-sarsat.org.
[8] http://www.guardiacostiera.it/servizi/navtexservices.cfm.
[9] http://www.mcaorals.co.uk/.
[10] Industry Canada, “Maritime Radio Transmitters and Receivers in the Band 156-162.5 MHz” RSS-182, 2003.
[11] New Zealand’s Ministry of Commerce, “Specification for Radio Apparatus: VHF Maritime Mobile Service” RFS33, 1991.
[12] Recommendation ITU-R M.493-11, “Digital selective-calling system for use in the maritime mobile service”, 2004.
[13] http://www.infodomus.it/radio/codici/emissioni.htm
[14] Aldo N. D’Andrea, “Comunicazioni Elettriche”, ETS, 2002.
[15] Leon W. Couch II, “Fondamenti di Telecomunicazioni”, Apogeo, 2002.
[16] http://www.geocities.com/acoslovich/modudigi/modudigi.htm#fsk.
[17] Ruggero Reggiannini, “Appunti di Sistemi di Radiocomunicazione”, SEU, 2004.
[18] http://infocom.uniroma1.it/alef/libro/html/libro/node244.html.
[19] John G. Proakis, “Digital Communications”, McGraw-Hill, 2000.
[20] Raymarine RAY 210 VHF Operation Manual.


![Tabella 1.3: tipologie di equipaggiamento VHF radio marittimo [10]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7311885.88446/13.892.128.818.124.776/tabella-tipologie-equipaggiamento-vhf-radio-marittimo.webp)



![[1] Eroz M.,Sun F. -W.,Lee L.-N.: DVB-S2 Low Density Parity Check Codes with near Shannon Limit Performance.](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)