Quarto Capitolo
Implementazione sperimentale
In questo capitolo, viene presentato l’intero impianto di misura,
implementato per la sperimentazione della tecnica di indagine termica
in questione.
In particolare, viene descritto lo schema meccanico per la
configurazione dell’allineamento ottico e il circuito elettronico
progettato per l’elaborazione analogica dei segnali rivelati dai
fotodiodi.
4.1 DESCRIZIONE FUNZIONALE DEL SETUP
SPERIMENTALE
Lo schema a blocchi dell’apparato sperimentale è mostrato qualitativamente nella fig.4.1, dove viene evidenziata la configurazione del particolare allineamento ottico implementato; la fotografia di fig.4.2 presenta la strumentazione adottata per lo svolgimento delle misure sperimentali.
Figura 4.1: Schema a blocchi dell’apparato
4.1.1 Piano ottico
La configurazione del piano ottico viene implementata tramite la struttura mostrata in fig.4.4, costituita da una piattaforma in alluminio, di dimensioni 20x20x1cm, sostenuta da quattro supporti dello stesso materiale. Lo schema di disposizione degli strumenti ottici, opportunamente inglobati in case metallici di protezione e di fissaggio, è stato organizzato secondo le esigenze di allineamento ottico.
Va precisato sin d’ora che la luce Laser è modulata a 15KHz, per ridurre gli effetti del rumore flicker intrinseco e per tagliare fuori le fluttuazioni di rumore ottico dovute all’interferenza con la luce ambientale. La fig.4.3 mostra l’andamento della modulazione laser, visualizzato sull’oscilloscopio analogico a disposizione.
Figura 4.3: Modulazione Laser
Va osservato come ciò imponga una limitazione nella banda dei segnali rivelabili; ci si propone di ampliare la banda fino a qualche decina di MHz, con un sistema di modulazione avanzato. L’AC driver attualmente a disposizione, infatti, oltre un valore di frequenza di qualche decina di KHz genera distorsioni indesiderate.
Per il pilotaggio del laser si è sfruttato un driver esterno, che consente di regolare manualmente la corrente di iniezione e il valore della potenza ottica emessa. Inoltre, per evitare fenomeni di instabilità di emissione, è previsto un sistema di termostatazione con cella Peltier alimentata a ±5V.
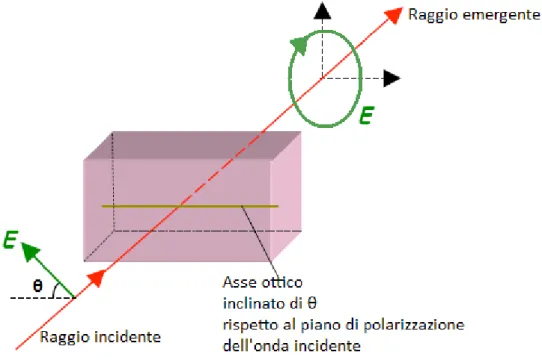
Il fascio laser attraversa una lamina a λ/2, che, costruita con un cristallo birifrangente, ha uno spessore tale da ruotare il vettore campo elettrico uscente di un certo angolo rispetto a quello entrante.
Il raggio entra nella lamina con polarizzazione lineare ed angolo θ rispetto all'asse ottico della lamina stessa. Per la proprietà del cristallo birifrangente, le componenti del vettore campo elettrico, parallela e perpendicolare all'asse ottico della lamina, si propagano con velocità diverse, perché il cristallo presenta, in queste due direzioni, indici di rifrazione n1 ed n2. All’uscita della lamina, esse si
ricompongono e il piano di polarizzazione risulta ruotato di 2θ.
Matematicamente, la differenza di fase si calcola come 2 1 2 2 l l
con λ1 e λ2 lunghezze d'onda delle componenti parallela e perpendicolare
all’asse ottico. Dato che la lunghezza d'onda in un mezzo si può calcolare come rapporto tra la lunghezza d'onda nel vuoto e l'indice di rifrazione:
n
VUOTO MEZZO
la differenza di fase si può esprimere come:
1 2 2 ln n
con λ la lunghezza d'onda della radiazione nel vuoto.
Perché si ottenga la rotazione del piano di polarizzazione indicata in precedenza, occorre che le sue componenti vengano sfasate per λ/2, o meglio occorre che:
2 1
k , kN
Quindi uguagliando le due equazioni:
2 1 2 1 2 k n n lsi ottiene che lo spessore della lamina deve essere:
2 1 2 1 k n n l
Da queste formule è evidente che una lamina di un certo spessore è efficace solo su una precisa lunghezza d'onda.
Il fascio emergente attraversa il beam splitter cube (fig.4.6). Si tratta di un cubo fatto di due prismi triangolari, incollati alla loro base mediate uno strato di resina, il cui spessore è tale che, per una specifica λ, una porzione della luce incidente venga riflessa e la restante venga trasmessa.
Figura 4.6: Beam splitter cube, raggio incidente, riflesso, trasmesso
Va precisato che, per garantire l’effettiva separazione di fascio, il beam splitter cube è posizionato sul piano ottico in maniera tale che la radiazione luminosa emergente dalla lamina a λ/2 incida sull’interfaccia di contatto con un angolo di incidenza minore del particolare angolo critico e differente dall’angolo di brewster. E’ possibile stabilire quanta porzione di segnale incidente venga riflessa e quanta trasmessa, ruotando manualmente la lamina a λ/2, osservando i segnali rilevati dai fotodiodi, secondo le esigenze sperimentali.
L’operazione è possibile in quanto la lamina è posta all’interno di un contenitore che ne consente la rotazione manuale e il fissaggio.
Nel caso specifico, per motivazioni che verranno spiegate in seguito, si vuole ottenere che l’ampiezza del segnale rivelato dal fotodiodo di riferimento sia minore rispetto all’ampiezza del segnale estratto dal fotodiodo di rivelazione; per cui si procede con una sorta di “calibrazione ottica” e la lamina a λ/2 viene ruotata
in maniera tale che il 10% della potenza luminosa emessa dal laser di sondaggio venga riflessa e incida sull’area sensibile del fotodiodo di riferimento.
Il restante 90%, trasmesso, attraversa la lamina a λ/4. Il raggio incide sulla superficie della lamina perpendicolarmente, così entrambi i raggi in cui viene scomposto vengono rifratti nella stessa direzione perpendicolare alla superficie, ma essendo affetti da indici di rifrazione diversi, percorrono la lamina con diverse velocità, uscendone quindi sfasati.
Lo spessore della lamina è tale da ruotare di π/2 la componente del vettore campo elettrico perpendicolare all’asse ottico.
4 1 2 1 k n n l
La polarizzazione dell’onda viene quindi trasformata da lineare ad ellittica destrorsa.
Figura 4.7: Rotazione della polarizzazione attraverso una lamina a λ/4
Nel caso particolare in cui il vettore campo elettrico entri nella lamina a λ/4 con angolo di π/4 rispetto all’asse ottico, la polarizzazione dell’onda uscente viene resa circolare.
Il fascio emergente viene deviato di 90°, tramite uno specchio inclinato, sulla lente focalizzatrice, che collima il fascio sul target riflettente.
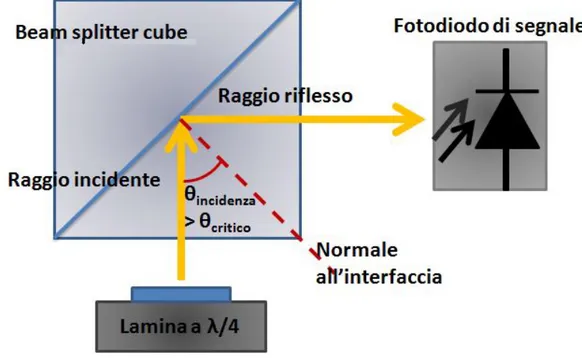
L’onda riflessa, con polarizzazione ellittica sinistrorsa, percorre il cammino ottico inverso, attraversa la lamina a λ/4 e ne fuoriesce con polarizzazione nuovamente lineare. Attraverso il beam splitter cube, in questo caso, non si verifica la separazione del fascio, in quanto il dispositivo separatore è posizionato in maniera tale che l’onda emergente dalla lamina a λ/4 incida sulla superficie di contatto con angolo di incidenza maggiore dello specifico angolo critico. Si verifica il fenomeno della riflessione totale del fascio incidente verso l’area sensibile del fotodiodo di segnale, come mostrato in fig.4.8.
Figura 4.8: Riflessione totale attraverso il beam splitter cube
I segnali fotorivelati, di riflessione e di riferimento, vengono elaborati con operazioni analogiche di amplificazione, condizionamento e demodulazione e successivamente acquisiti e trattati digitalmente.
4.1.2 Target
Il target è una resistenza a film spesso, diffusa su una lastrina di allumina, Al2O3.
E’ presente un livello superiore di fotoresist positivo Microposit S1818, su cui viene evaporato uno strato di 300nm di alluminio, per consentire la riflessione.
Figura 4.9: Resistenza diffusa su allumina
A temperatura ambiente, il valore della resistenza è pari a 2,47Ω. Sono state effettuate misure a quattro contatti per valutare la variazione nel valore di resistenza in funzione della temperatura. I dati ottenuti sono riportati nella tabella I e graficati in fig.4.10. T[°C] R[Ω] 10 2,4207 20 2,459 30 2,4901 40 2,531 Tabella I
Figura 4.10 : Andamento della resistenza diffusa in funzione della temperatura
Dai risultati conseguiti, si deduce la seguente relazione di dipendenza dalla temperatura: 38 , 2 10 62 , 3 ) (T 3T R
4.2 CIRCUITO DI ELABORAZIONE ANALOGICA
Le operazioni di elaborazione analogica dei segnali in uscita ai fotodiodi sono svolte da un circuito elettronico (fig. 4.11) costituito da tre stadi funzionali, posti in cascata.
Il primo è uno stadio a transimpedenza, utile affinché il fotodiodo si comporti come generatore ideale di corrente. Segue uno stadio intermedio, che fornisce i segnali di ingresso al circuito integrato che svolge le operazioni di demodulazione e di normalizzazione rispetto alla potenza ottica emessa.
4.2.1 Stadio a transimpedenza
Un fotodiodo non è un generatore di corrente ideale; quindi, utilizzando una resistenza per la misura della corrente prodotta, non tutta Iν circolerà in RL, a
meno che RL=0.
Figura 4.12: Rivelazione di tipo fotovoltaico
Ciò ha comportato la necessità, in fase di progettazione del circuito, di adottare un montaggio a transimpedenza, come mostrato nella figura che segue, in cui, nel circuito equivalente per il fotodiodo, vengono mostrati solo il generatore di fotocorrente Iν e la capacità di giunzione Cd.
Figura 4.13: Montaggio a transimpedenza
Utilizzando l’ingresso di un amplificatore operazionale, il fotodiodo vede un corto circuito virtuale a massa. L'impedenza di ingresso dell'amplificatore di tensione reazionato in corrente dalla R è pari a RIN = R/Av, che assume un valore piuttosto
resistenza di reazione, consentendo di misurare l’effettiva tensione di fotodiodo. Il problema nell’approccio fotovoltaico è la limitata larghezza di banda. Tuttavia, sfruttando il montaggio a transimpedenza, la resistenza vista dalla capacitá Cd è
sostanzialmente RIN, ovvero molto piccola, e ciò consente di aumentare la
frequenza di taglio del sistema e di diminuire la costante di tempo associata.
IN d T R C f 2 1
La resistenza in serie al terminale non invertente, di valore pari alla resistenza di reazione, è utile per ridurre gli effetti di offset in uscita dovuti alle correnti di polarizzazione di ingresso.
I segnali prodotti da questo stadio sono VS(t) e VR(t), ovvero le tensioni di segnale
e di riferimento, dipendenti dal tempo in quanto la sorgente laser è modulata dall’AC driver esterno.
In particolare, ) sin( ) ( ) (t R1I t R1I 0t VS S S ) sin( ) ( ) (t R2I t R2 I 0t VR R R
La IR(t) e la IS(t) sono le fotocorrenti, date dal prodotto tra il coefficiente di
Responsivity, parametro specifico del fotodiodo utilizzato, e la potenza ottica incidente sull’area sensibile del dispositivo di fotorivelazione.
4.2.2 Stadio intermedio
Per la progettazione di questo stadio è stata sfruttata la funzionalità dell’amplificatore differenziale integrato INA111, [18], la cui configurazione interna è presentata nella figura seguente.
Figura 4.14: Struttura interna INA111
Il terminale 5, di riferimento, è posto a massa.
Si tratta della configurazione tipica dell’amplificatore differenziale da strumentazione, che è particolarmente adatto per l'uso nel campo delle misure elettroniche e nelle strumentazioni professionali.
La sua struttura è derivata dall'amplificatore differenziale semplice: rispetto a questo presenta due operazionali in più che migliorano, aumentandola, l'impedenza di ingresso e permettono di calibrare l'amplificazione del segnale differenziale d'ingresso (VIN+-VIN-) variando il valore del solo componente RG.
La relazione tra tensione di uscita e tensione differenziale di ingresso è data da:
) ( 50 1 IN IN G OUT V V R V
Si può, quindi, regolare facilmente il guadagno agendo sulla resistenza RG di
calibrazione.
Dallo stadio intermedio sono prodotti i segnali A e B che andranno in ingresso all’integrato.
Il segnale A risulta dall’amplificazione della differenza tra la tensione di segnale e quella di riferimento
A = GD[VS(t) - VR(t)].
Il segnale B corrisponde invece alla tensione di riferimento amplificata
B = GRVR(t).
I segnali in ingresso allo stadio di uscita devono essere in fase, affinché l’operazione di demodulazione avvenga in maniera adeguata.
Perché i segnali restino in fase, deve essere garantito un allineamento ottico tale che le ampiezze delle modulazioni soddisfino la seguente relazione
S R
V V
Nel caso contrario i segnali entrano nel circuito integrato sfasati di π.
La VOUT è il risultato della demodulazione e normalizzazione operate dal chip
AD698, ed è pari a ) ( ) ( t B t A I R
VOUT OUT REF
in cui ROUT è la resistenza di uscita e IREF è la corrente di riferimento prodotta da
4.2.3 Stadio di demodulazione e di normalizzazione
Per questa parte di elaborazione è stata sfruttata la funzionalità del circuito integrato AD698, fornito dalla Analog, [16], che è stato progettato specificatamente per il pilotaggio e la rivelazione di un trasformatore LVDT, Linear Variable Differential Transformer, e che genera in uscita un segnale elettrico proporzionale allo spostamento del nucleo mobile rispetto alla sua posizione di riposo. Uno schema a blocchi dell’AD698 con un LVDT collegato al relativo input è indicato nella figura.
Figura 4.15: Schema a blocchi dell’AD698, con LVDT
La bobina costituente il primario viene eccitata tramite una sinusoide di riferimento generata dall’oscillatore locale. La tensione attraverso la serie del secondario è funzione di quanto il nucleo si è spostato rispetto alla sua posizione centrale. L’informazione sul senso del movimento è contenuta nella fase dell'uscita.
Per il pilotaggio, la struttura dell’AD698 prevede un oscillatore sinusoidale e un amplificatore di potenza. Un decodificatore determina il rapporto tra la tensione del segnale di uscita attraverso il secondario, che contiene, nell’ampiezza, l’informazione sullo spostamento, e la tensione di pilotaggio (A/B). Un filtro e un amplificatore di uscita vengono utilizzati per regolare il risultato.
L’integrato AD698 demodula in maniera sincrona l’ingresso modulato in ampiezza, A, e un segnale di riferimento fisso, generato localmente, B.
Lo schema a blocchi funzionali è indicato nella fig. 4.16.
Figura 4.16: AD698, schema a blocchi funzionali
Gli ingressi sono due canali indipendenti di demodulazione. Per quanto riguarda il canale B, l'uscita demodulata viene filtrata da C2 e viene trasmessa al circuito di
normalizzazione. Il canale A è identico salvo che per i collegamenti del comparatore. L’uscita rettificata viene filtrata da C3.
Per compensare l’eventuale sfasamento del primario rispetto al secondario, che non consentirebbe il buon esito dell’operazione di demodulazione sincrona, una rete di compensazione di fase può essere implementata per aggiungere un anticipo o un ritardo di fase al segnale A.
Una volta che entrambi i canali sono demodulati e filtrati, un circuito di divisione normalizza A rispetto alla tensione di riferimento B.
Il segnale DC ottenuto in uscita è dato dalla seguente relazione
2 ( ) D S R OUT REF R R G V V V I R G V
Per quanto riguarda la sensibilità, rispetto alle variazioni di temperatura, della tensione di uscita, si ottiene che
0 D OUT S R R V G V V V G V0 è nota 0 REF 2 500 200 100 V I R A k V Supponendo che 100 , 100, 10 R D R V mV G G si ricava che 4 10 OUT S V V
Se in fase sperimentale si rileva che la variazione del segnale riflesso in funzione della temperatura del target sia tale che
C V T VS / 10
si ottiene una sensibilità in uscita pari a C mV T VOUT / 100
su cui è possibile agire regolando opportunamente alcuni parametri. In particolare, si può:
Ridurre VR, regolando la frazione di potenza ottica incidente sul fotodiodo di
riferimento,
Ridurre GR, il guadagno dell’amplificatore differenziale nel ramo relativo al
segnale di riferimento, agendo sulla RG di calibrazione,
Aumentare GD, il guadagno del segnale differenziale (VS-VR), agendo sulla
RG di calibrazione,
Aumentare V0, scegliendo per R2 un valore opportuno.
4.2.3.1 Banda del sistema
I condensatori C2, C3 e C4 sono una funzione della larghezza di banda desiderata. I
valori di queste capacità devono essere nominalmente uguali. In particolare,
C2 = C3 = C4 = 10-4 F Hz/fSYSTEM
Se larghezza di banda desiderata è di 10KHz, allora i condensatori suddetti devono essere dimensionati sulla base della seguente relazione:
C2 = C3 = C4 = 10-4 F Hz/100KHz = 10nF
Se, invece, le specifiche richiedono che la banda del sistema si estenda fino a 100KHz, il valore delle capacità deve essere ridotto a 1nF.
Tuttavia, il dimensionamento volto ad allargare la banda del sistema comporta l’inevitabile aumento della tensione di ripple sul segnale DC in uscita, come indicano gli andamenti mostrati nella fig. 4.17.
Figura 4.17: Ampiezza del ripple in uscita in funzione del valore delle capacità di filtraggio
Le curve riportate sono parametrizzate in base a valori specifici di frequenza di eccitazione di ingresso, f=10KHz, e di capacità in parallelo alla R2.
Si conclude che nel dimensionamento dei condensatori, e quindi nella scelta della banda operativa del sistema, bisogna tener conto di queste considerazioni e decidere sulla base di un compromesso.
4.2.3.2 Offset e Dinamica di uscita
La scelta dei valori di R3 e di R4 consente di regolare la tensione di offset di
uscita, sfruttando la relazione seguente
k R k R R V VOS 2 1 2 1 2 . 1 4 3 2
Se, per un determinato valore del rapporto A/B, | | | | | R R S R D V V V G G B A
si osserva una dinamica di uscita di 5V , mentre è richiesta una dinamica solo positiva, sarà necessario impostare un offset di 5V.
Si procede imponendo, nella relazione mostrata in precedenza, VOS=5V. Siccome
è richiesto un offset positivo, R4 sarà un circuito aperto. Dalla risoluzione
dell’equazione, si ottiene il valore richiesto, per R3, che consente di scalare di
l’intera dinamica di +5V.
Nell’ambito delle sperimentazioni, al fine di regolare la tensione DC in uscita nel range della dinamica richiesta, si è ritenuto opportuno utilizzare un trimmer multigiro con in serie una resistenza di valore fisso, da cambiare di volta in volta, in maniera adeguata.
4.2.3.3 Dipendenza della tensione di uscita dalla temperatura
L’espressione per la tensione di uscita è la seguente 2 out ref A V I R B
Essendo R2 = 200 KΩ e Iref = 500µA, si ottiene:
R R R s D OUT V G V V G V V (100 ) ( )
Considerando la sola dipendenza della R di transimpedenza dalla temperatura, è possibile di valutarne qualitativamente gli effetti sulla tensione di uscita.
Il coefficiente di temperatura della Rdi transimpedenza è pari a: C ppm 100 / In altri termini: 6 1 0 0 0 10 100 ) ( ) ( ) ( C T T R T R T T R
Nell’ipotesi in cui la variazione di resistenza possa essere considerata lineare con T, è possibile scrivere T T R T T R( 0 ) ( 0) Quindi:
6 0 1 1 0 0 ) ( ) ( ) 100 10 (T T R T T R T R T C T Cda cui si ricava, essendo R = 1KΩ, che:
C T R 1 , 0 10 100 ) ( 0 6
Nell’ipotesi in cui GD=100 e GR=10, è possibile scrivere:
R S OUT V V V V (1000 )
In particolare, sistemando l’allineamento ottico in maniera tale che IS=IR ed
essendo la resistenza di transimpedenza pari a 330Ω per il fotodiodo di riferimento, si ricava la seguente relazione:
T V VOUT 330 1000
da cui si ottiene: C mV C V T VOUT / 300 1 , 0 330 1000
La scheda di elaborazione è stata opportunamente inscatolata e termostatata con un sistema Peltier supportato da un dissipatore attivo, come mostrato in fig.4.18, in modo da contenere gli effetti della temperatura ambiente sulle variazioni della tensione di uscita.
4.2.4 Circuito stampato
Per la fase di progettazione del circuito stampato, è stata sfruttata la tecnologia Surface Mounting Tecnology (SMT), che è una tecnica di assemblaggio in cui i componenti elettronici sono applicati superficialmente, senza necessità di foratura, come è invece richiesto nella tecnica classica.
I vantaggi offerti da questa soluzione sono principalmente di notevole riduzione delle dimensioni dei componenti e quindi minori dimensioni degli apparati, di massima automazione e velocizzazione delle procedure di montaggio e di assenza di scarti dovuti alla necessità di taglio dei reofori eccedenti.
I componenti (SMD) sono dotati di piccole estremità metalliche che consentono la saldatura diretta tramite aria calda.
Nella figure seguenti è mostrato il progetto del circuito stampato e la sua realizzazione finale.
Figura 4.20: Realizzazione finale del circuito stampato
Le viti di fissaggio mostrate nella figura servono per bloccare la scheda di elaborazione sul fondo del contenitore metallico termostatato, con gli opportuni accorgimenti di accoppiamento termico. Ciò consente, inoltre, un più agile collegamento delle sonde di test nelle operazioni di osservazione sperimentale dei segnali in uscita ai vari stadi di elaborazione.