CHAPTER V
DISCUSSION AND CONCLUSIONS 5.1. Goals of the study
The present work had several goals, in terms of characterization of cuff performance. They can be summarized in:
1. How many and which different stimuli can be distinguished by mean of tripolar cuff electrodes? 2. Which is the best features set and the most appropriate classifier?
3. For correct classification which influence has: • Type of stimuli?
• Classifier?
• Duration of window?
• Duration of stimuli application?
It has to be pointed out that the performed study has the advantage of using a “close to reality” situation, described in the next points:
1. During the data elaboration process we have used all actual recording signals, and not only the nice trials, extrapolated from complete signal recordings.
2. The stimuli chosen are relevant from physiological and bioengineering points of view, and not those which give more differentiated signals during the ENG recording.
3. During data elaboration there were not pre-choices: several features and classifiers have been tested in parallel to determine the best one.
In order to have an idea about the quality and correctness of the results obtained, some hypotheses, based on technology of the cuff electrodes and physiology of the peripheral nervous system have to be defined.
Cuff electrodes are implanted around the whole nerve, thus not permitting the contact with single nerve fibers, which are conducting different afferent and efferent activity signals, as explained in
electrodes, but have the advantage of reduced invasiveness with respect to other neural microelectrodes (e.g. LIFE, sieve).
Physiological Hypotheses
The six type of stimuli applied during the in-vivo experimentation, are “overlapping” from the physiological point of view, representing activation of only four different types of different classes of nerve fibers.
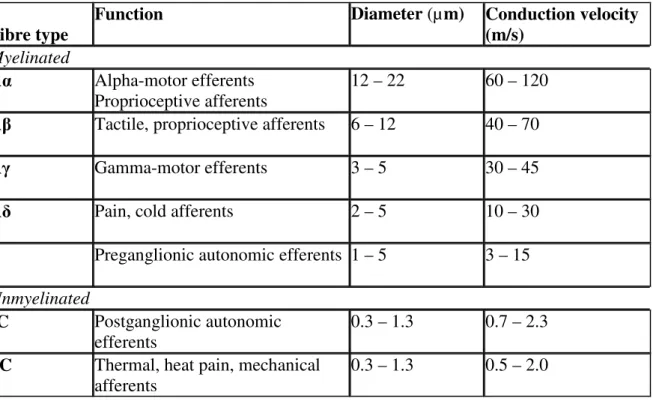
In order to better understand this, see table 5.1.
Table 5.1. Types of nervous fibers
The pain fibers are Aδ or C and are not overlaping function with other stimuli tested, hence, when stimulating pain it should be possible to distinguish well this signal with respect to all others . Tactile and proprioceptive receptors use the same “road”, i.e. Aβ fibers, whereas motor efferent and proprioceptive signals are conducted by Aα fibers, then it should be supposed that it is more difficult to distinguish between them.
Fibre type
Function Diameter (µm) Conduction velocity
(m/s) Myelinated
Aα Alpha-motor efferents Proprioceptive afferents
12 – 22 60 – 120
Aβ Tactile, proprioceptive afferents 6 – 12 40 – 70
Aγ Gamma-motor efferents 3 – 5 30 – 45
Aδ Pain, cold afferents 2 – 5 10 – 30
B Preganglionic autonomic efferents 1 – 5 3 – 15 Unmyelinated
sC Postganglionic autonomic efferents
0.3 – 1.3 0.7 – 2.3 dC Thermal, heat pain, mechanical
afferents
However, the differences of sensory receptors between different types of stimuli could give different stimuli signaling, in spite of using the “same road” for neural signal.
There are two types of receptors according to their adaptation characteristics: 1. Tonics(respond to static stimuli)
2. Phasics (respond to dynamic stimuli)
Functionally the stimuli used during the experimentation can be classified like this : 1. Brush -> tactile - Aβ fibers; phasic receptor
2. Scratch -> tactile - Aβ fibers; phasic receptor
3. Von Frey filaments (VF) -> tactile - Aβ fibers; tonic receptor
4. Flexion of hindpaw -> proprioceptive- Aα, Aβ fibers; phasic receptor 5. Pinch on the paw -> nocioceptive - Aδ fibers; tonic receptor
6. Pinch on contralateral paw -> efferent Aα fibers
As shown above, there are only four types of stimulation conditions if considering the nerve fibers used for their conduction. Although, the different receptors could give to differential neural signals.
5.2. Discussion on the results obtained
The data elaboration has been performed for different sub-sets of up to a maximum of six stimuli (e.g. two stimuli, three stimuli, four stimuli, five stimuli). The significant results are presented in the results chapter.
One particular observation for efferent signal has to be done. Generally its SNR was poor during recordings, consequently, it has been often attributed to the rest pattern during the data classification. The problem is that it is really difficult (especially during the animal experiments, because we cannot elicit voluntary activity in the rat) to obtain efferent high SNR signals. There is almost always significant EMG noise mixed, as well the afferent signals.
Some other ideas to obtain more efficient efferent signals, proposed in the literature, (in comparison with our case, where we provoked if by means of the crossed withdrawal reflex arc) are experiments with free-walking animal, or with graded hot-pain stimulation of the contralateral hindpaw, but they suffer also from similar problems. In the case of graded hot-pain stimuli (simlar to our case in which we applied a mechanical-pain stimuli) the problem of EMG persists, and the signal can be obtained only with low amplitude. On the other hand, in the case of freely-moving animal, by walking, animal is activating all the complex afferent signals of touch and proprioception, hence it can be useful only in the case if we would be able to do some initial, highly correct classification between efferent and afferent signals.
5.2.1. Two stimuli classification
According to the physiological hypothesis the worst classification has been obtained in the case of Scratch versus Brush (up to 66.10% of correct classification). This was physiologically expected, because those stimuli have the same fibers for conduction and the same type of receptors.
The second worst case (71.43%) is of efferent versus proprioceptive. In fact, the efferent signal has a low SNR and its easily attributed to the rest state (as can be seen in the results chapter plots). In the other cases the results are positive and in agreement with the physiological bases: nocioceptive, which has different pathway of conduction than all the other situations gave good percentages (81.48%, 81.24%)
The comparison of VF versus proprioceptive gives really promising result, not only because of its high classification rate (up to 89.54%), but also because of essential importance which could have those two type of stimuli in an eventual bio-engineering application – for optimizing the grip force (touch) and feedback for manipulation (proprioceptive).
It could be confirmed that the comparison of scratch versus VF (same fiber, different receptor) gave a good classification rate (up to 83.92%), while brush versus scratch (same fiber, same receptor)
gave the worst one, suggesting that also stimuli transduced by different type of receptors can be recognized by using cuff electrodes.
The stimulus duration is also important. The representative case is VF (slow stimulus, recognized by 100%) versus Scratch (rapid stimulus, recognized by 3043%), as it can be observed in Conf Mat for this case. A good characteristic of the classification is that it is quite robust (e.g. almost completely insensitive on false positives) and it is based on time-features, which are quickly to extrapolate and can be implemented in real time processors easily.
5.2.2. Three stimuli classification
As observed, due to the low SNR of efferent signal, its performance is low in classification (up to 71.66%, 74.90% ).
According to our physiological hypothesis the worst classification rate (without considering efferent activity) has been the estimation of similar types of sensory signals, i.e. VF, Brush, Scratch (up to 74.50%).
In the other cases the results were positive and in accordance with the physiological bases: touch, proprioceptive and nocioceptive (up to 83.47%) and two types of touch with different receptors (VF, Scratch) and Proprioceptive (up to 84.82%) can be classified with a high success.
We can conclude that three stimuli with different physiological types of fibers or of receptors can be classified with a high percentage of accuracy.
The classifier robustness regarding false positives is confirmed. The best results have been found using HOS feature set (two VAR (lag0,lag2)) and 4.order moment, and with combination IAV and VAR(lag2). The best results were obtained with non linear classifiers -ANN and KNN (respect linear Bayesian)
The best classification window was a 150 msec window. A very interesting observation is that the power of statistics based classifiers increased by increasing window duration, as can be observed in
cases in which for shorter windows the better choice is some other feature-combination while with long ones the best is almost always HOS.
It is confirmed that the better recognition rates were achieved for those stimuli which are applied for long time duration. This was expected considering that classifiers with more samples for training provide better recognition rates.
5.2.3. Four stimuli classification
According to our physiological hypothesis the worst classification rate was achieved for Brush, Scratch, VF, Efferent (up to 66.57%), without recognizing almost completely the brush stimuli. Physiological “order” has been respected in terms of correct classification: four different types of signals (VF, Proprioceptive, Nocioceptive and Efferent) had the best classification rate (reasonable good 75.16%), with recognition of all different stimuli, while Scratch, VF, Proprioceptive and Nocioceptive reached 75% but with bad recognition of Scratch stimuli.
In conclusion up to four stimuli of different physiological nature (type of fibers) can be recognized up to reasonable good level (75%).
Regarding features set, classifier choice and robustness the same consideration as for three stimuli case are also valid.
5.2.4. Five stimuli classification
The correct classification of five different stimuli (Brush, Scratch, VF, Proprioceptive, Nocioceptive) went up to 72.61% but without completely recognizing the brush stimuli, while in the other comparisons the maximum was 70.24% with all stimuli recognized.
It can be affirmed that cuff electrodes are not able to recognize 5 different stimuli at an adequate level.
5.2.5. Six stimuli classification
With all the applied stimuli, the classification rate was up to 67.88% without recognizing completely the brush state and recognizing only 4/17 samples of scratch.
The efferent state had a rate of 12/44 while others -“dominant sates”- have been recognized with a good rate.
5.3. General conclusions
- Due to its summing nature and to the complex physiology of PNS we found that with tripolar cuff electrodes up to four physiologically different (afferent) stimuli can be recognized reasonably good. - In most cases the best feature set was the HOS, statistically based, while the best classifiers where non linear: primary ANN.
- The best performance has been obtained by using 150 msec observation window.
- The classification is robust (e.g. almost completely insensitive on false positives) and it is based on time-features, which are easy to extrapolate and can be implemented in real time processors without any problem.
- The stimuli duration is important for classification: the slow stimuli are better recognized, and this conclusion can help in future experimentation.
- In summary, we obtained reasonably good answers about which are the limits in pattern recognition of peripheral nerve signals recorded by using cuff tripolar electrodes, as well as on which are the most appropriate feature set and classifier to use.
These results will be used in the future to develop innovative FES systems and cybernetic prostheses.