CAPITOLO 3
Validazione Hardware
Come già accennato nel Capitolo 1, l’hardware necessario per l’applicazione di Ottica Adattiva (Scheda Audio e Schede Ricevitori), ma anche per le altre applicazioni, è stato rivisto criticamente e collaudato in modo esaustivo durante lo svolgimento di questa tesi. In particolare, in questo Capitolo verrà descritta in dettaglio la messa a punto della Scheda Audio, fondamentale per l’applicazione di Ottica Adattiva, in quanto permette di generare la sinusoide che comanderà lo specchio deformabile montato sul telescopio.
Inoltre la prima parte del Capitolo sarà dedicata alle soluzioni adottate per risolvere i problemi, emersi nelle fasi preliminari di collaudo, relativi all’hardware descritto nel Capitolo 1. In particolare, saranno discussi gli aspetti critici di progetto dei moduli ricevitori multicanale RS-422, relativi al dimensionamento della sezione di alimentazione, quando tutti i canali commutano alla massima frequenza possibile, e a fenomeni di accoppiamento tra canali fisicamente vicini (cross-talk). La parte di messa a punto dei ricevitori risulta infatti fondamentale per il calcolo corretto del segnale di curvatura.
3.1 Modifiche Hardware sui Ricevitori
Durante il testing delle schede ricevitori è stato notato innanzitutto un problema dovuto all’elevata temperatura raggiunta dal regolatore serie
(MC33269) montato sulla scheda, che deve fornire, a partire dai 12 V del Back Panel, i 3,3 V necessari ad alimentare i chip ricevitori. Il problema riguardava la dissipazione di potenza da parte dello stesso, in conseguenza della quale la temperatura di giunzione massima, nella condizione in cui tutti i canali commutano alla massima frequenza, usciva dal range consentito dal componente, il quale entrava di conseguenza in protezione, spegnendosi.
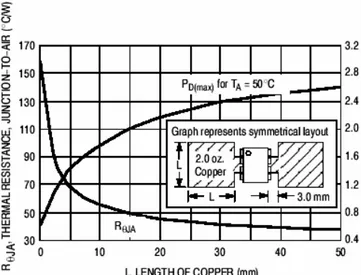
Si è pensato quindi ad una circuiteria apposita in grado di agevolare la dissipazione di potenza del componente, composta da una resistenza da 22 Ω a monte del regolatore serie da 3,3 V e da due piazzole in rame in contatto con il case del regolatore. In questo modo si è diminuita la dissipazione di potenza sul regolatore stesso, che è proporzionale alla caduta ai suoi capi. Con la resistenza un po’ di questa caduta finisce sulla resistenza stessa e quindi la restante potenza che deve dissipare il regolatore è più bassa. Con le piazzole in rame invece (secondo il datasheet del componente, Figura 3.1), si va a diminuire la resistenza termica tra case e giunzione, in modo che per termoconvezione si rientri nei corretti range di funzionamento dello stesso.
Figura 3.1: Grafico per il dimensionamento delle piazzole di rame sul regolatore MC33269.
Tali aggiunte sono mostrate nel dettaglio in Figura 3.2 dove, sulla sinistra è visibile il regolatore, sulla destra la resistenza SMD da 22 Ω.
Figura 3.2: Modifica apportata alla scheda dei ricevitori.
Vediamo i passi analitici compiuti per giungere a tali modifiche. La tensione in ingresso al regolatore, che giunge dal Back Panel, è 12 V; in uscita deve fornire i 3,3 V. Deve valere comunque la seguente relazione:
IN OUT DROP
V >V −V (3.1)
dove VIN = 12 Ve VOUT =3,3 V sono le tensioni in ingresso e uscita dal regolatore; VDROP = 1,1V è la tensione di dropout del regolatore.
Come detto prima, abbiamo inserito innanzitutto una resistenza R da 22 Ω prima del regolatore come mostrato in Figura 3.3.
Figura 3.3: Schema a blocchi della modifica alla sezione di alimentazione.
Ognuno degli 8 ricevitori ha una ICC massima di 17 mA; quindi la
modo da essere sicuri di rientrare certamente nei limiti del componente. A questo punto la caduta su R risulta:
22*0, 2 4, 4 V
= =
R
V (3.2)
da cui una potenza dissipata pari a: 2 0,88 W = R = R V P R . (3.3)
Quindi è sufficiente una resistenza capace di dissipare 1 W. Con una
33 = Ω
R , invece, servirebbe una resistenza capace di dissipare 2 W. Scegliendo una resistenza di tipo SMD abbiamo optato per la prima soluzione, che comunque permette di rimanere nei range di funzionamento del componente. Infatti:
7,6 V
′ = − =
IN IN R
V V V (3.4)
e la (3.1) continua effettivamente a valere. La differenza di tensione fra ingresso e uscita risulta a questo punto:
4,3 V
∆ =V VIN −VOUT = . (3.5)
Da cui una potenza da dissipare di: * 4,3*0, 2 0,86 W
= = =
D
P V I . (3.6)
Consideriamo la seguente relazione: *
J A D JA
dove TJ e TA sono rispettivamente le temperature di giunzione e ambiente,
JA
θ la resistenza termica tra giunzione e ambiente; considerando la massima temperatura di giunzione di 150 °C, fornita dal datasheet, una temperatura ambiente di 25 °C, ed una potenza da dissipare data dalla (3.6) è possibile ricavare: °C 145 W θ = − = MAX J A JA D T T P . (3.8)
Con due piazzole da 1 cm2 e seguendo il grafico di Figura 3.1 si ottiene
una θJA = 56°CW. Essendo minore del valore ricavato con la (3.8) siamo riusciti a rientrare nei range di funzionamento consentiti.
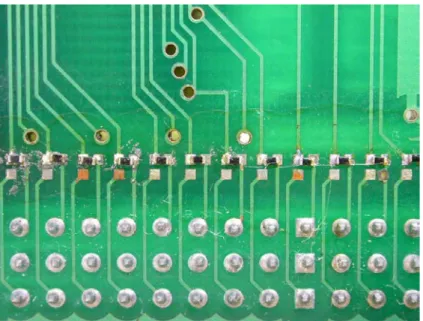
Durante il testing è stato riscontrato anche il fenomeno del cross-talk tra canali adiacenti, dovuto principalmente ad accoppiamenti capacitivi tra le linee. Il problema è stato risolto con l’aggiunta di una resistenza da 100 Ω in serie alle uscite dei ricevitori differenziali RS-422 (Figure 3.4), riducendone lo slew-rate. Il valore della resistenza è stato calcolato in base ai tempi di salita e di discesa del segnale, in modo che la banda di 20 MHz fosse comunque garantita.
Figura 3.4: Dettaglio delle resistenze aggiunte per eliminare il fenomeno del cross-talk.
3.2 Testing dei Ricevitori
Le modifiche apportate ai ricevitori appena descritte, sono state verificate durante lo svolgimento di questa tesi, portando l’intero sistema al Politecnico di Milano dove è stato collegato al sensore SPADA. Infatti, oltre ai test condotti presso i laboratori del Dipartimento di Ingegneria dell’Informazione dell’Università di Pisa utilizzando un emulatore del sensore costituito da due schede “trasmettitori” duali di quelle “ricevitori” esposte in precedenza, è stato molto utile collaudare il nostro modulo di acquisizione con il sensore che in futuro verrà effettivamente collegato ad esso, dimostrando così il corretto funzionamento dell’intero sistema.
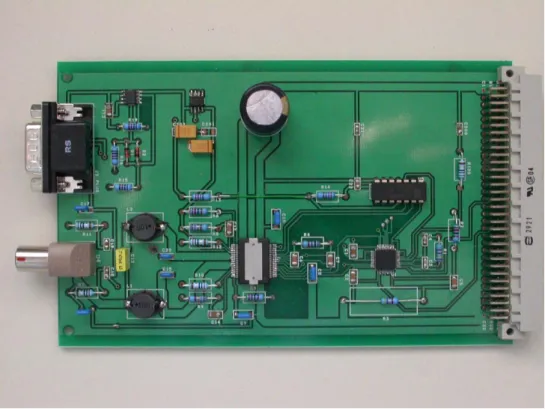
Come appena detto, prima di portare il sistema alla prova definitiva col sensore SPADA, si è testato il tutto in laboratorio mediante un emulatore costituito da due schede trasmettitori, collegate anch’esse ad un Back Panel identico a quello del sistema SPADA, che trasmettono un segnale ai 60 canali dei ricevitori. Oltre ai due trasmettitori è stata progettata una scheda con ingresso coassiale, in modo da poter essere collegata facilmente ad un generatore di forma d’onda (Figura 3.5).
Figura 3.5: Scheda utilizzata per testare i ricevitori: sulla destra il collegamento coassiale; nella parte centrale i pin in cui inserire i jumper.
Con questa scheda è possibile mandare il segnale, sfruttando dei jumper, ai singoli canali dei ricevitori: in realtà con un jumper attiviamo i canali dei ricevitori a coppie. La scheda è naturalmente collegata al Back Panel, in modo che i dati siano instradati in maniera corretta e coerente con il rack ricevente.
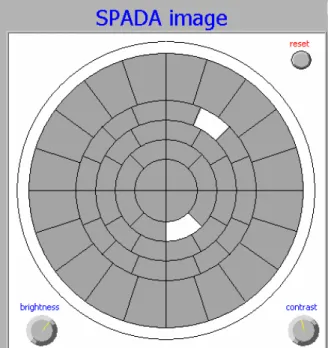
Per quanto riguarda la visualizzazione dei risultati, si è sfruttata un’interfaccia LabView disegnata in modo da presentare i risultati del conteggio all’interno di una griglia circolare (per adattarsi al piano focale del telescopio) divisa in 60 settori che si colorano in toni di grigio in dipendenza del numero di fotoni ricevuti (Figura 3.6).
Figura 3.6: Immagine della griglia con 2 sensori attivati mediante un singolo jumper.
Ogni pixel corrisponde alla porzione dell’immagine bidimensionale acquisita dal singolo sensore SPAD.
Utilizzando un generatore di forma d’onda quadra, in modo che ogni fronte rappresentasse l’arrivo di un fotone, abbiamo eseguito una serie di test, via via più critici per il sistema. Inizialmente è stato testato ogni singolo canale spostando un jumper su ogni coppia di canali. Successivamente abbiamo effettuato delle prove attivando più canali
contemporaneamente, sia adiacenti che non: nel primo caso abbiamo potuto verificare l’assenza dei fenomeni di cross-talk, presenti in origine tra canali vicini. Il test finale è stato condotto attivando tutti e 60 i canali contemporaneamente e verificandone l’effettivo funzionamento.
Il test definitivo è stato effettuato collegando al rack proprio il sensore SPADA con cui dovrà lavorare in futuro. Vediamo le varie fasi dell’esperimento condotto a Milano. La Data Processing Board è stata collegata al sistema Linux, tramite collegamento FireWire, il quale riceve i dati immagazzinandoli nell’hard disk. La macchina Linux, come detto nei precedenti paragrafi, funziona anche come server TCP/IP. L’interfaccia LabView è stata intanto caricata sul PC remoto collegato al sistema Linux mediante cavo Ethernet.
A questo punto, con il sistema pronto al funzionamento, è stato proiettato uno spot luminoso mobile su di un monitor: il sensore SPADA è stato posizionato davanti a quest’ultimo (Figura 3.7).
Figura 3.7: Setup del Sistema SPADA per eseguire l'esperimento; sulla destra è visibile il rack sviluppato dall’Università di Pisa.
L’esperimento è stato condotto con vari livelli di luce nella stanza, da piena luce a buio completo. Alcune immagini di ciò che è stato visualizzato sull’interfaccia LabView sono mostrate nelle Figure 3.8.
Figura 3.8 a)
Figura 3.8 b)
Figura 3.8 d)
Figura 3.8: Risultati degli esperimenti condotti illuminando il sensore
SPADA con uno spot luminoso, sotto varie condizioni di luce circostanti:
a) in piena luce; b) luce intermedia; c) e d) completo buio.
Lo spot si muove casualmente lungo tutte le direzioni del monitor illuminando, come si vede in particolare nelle Figure 3.8 c) e d), solo i sensori che istantaneamente inquadrano lo spot. Abbiamo anche condotto esperimenti in presenza di una luce di varia intensità diffusa all’interno della stanza. I risultati sono mostrati nelle prime due Figure: in a) non si riesce a distinguere l’immagine dello spot in quanto troppa luce circostante incide sul sensore; in b) invece, sebbene comunque tutti i sensori siano parzialmente illuminati, è ancora possibile distinguere la posizione dello spot. Per il tipo di setup sperimentale utilizzato, c’è uno scambio tra alto e basso nei pixel illuminati rispetto alla posizione dello spot, come chiaramente visibile nelle Figure sopra. Davanti al sensore è presente infatti un obiettivo, e quindi una o più lenti (vedi Appendice) che invertono le immagini visualizzate: l’inversione destra/sinistra è automaticamente corretta col posizionamento del sensore davanti al monitor, come davanti ad uno specchio (in pratica c’è una doppia inversione che riporta le cose allo stato corretto); l’inversione alto/basso non è invece compensata, ma può comunque essere corretta via software, invertendo l’illuminazione sulla griglia.
Sono state condotte una serie di acquisizioni per diversi minuti, impostando diversi tempi delle finestre di acquisizione. La finestra minima per cui riusciamo a garantire un perfetto funzionamento è di 50 µs
che risulta largamente sufficiente per l’applicazione di Ottica Adattiva (il tempo minimo della finestra per la gestione di tale applicazione, come esposto nel Capitolo 1, è infatti di 333 µs circa). Per quanto ne sappiamo questa è la prima serie di immagini acquisite dal sensore SPADA.
3.3 La Scheda Audio
Il montaggio della Scheda Audio è stato di difficile realizzazione. Lo schema usato nella costruzione è quello fornito da Texas Instruments per la riproduzione di segnali in banda audio ad alta fedeltà denominato TDAA (True Digial Audio Amplifier) (Figura 3.9).
Figura 3.9: Schema a blocchi della scheda audio.
I due componenti principali sono un modulatore da PCM (Pulse Code Modulation) a PWM (Pulse Width Modulation) ed un amplificatore PWM. Naturalmente la scelta dei suddetti è ricaduta su componenti Texas Instruments, consigliati nello schema, che si sono dimostrati soddisfacenti per le nostre specifiche. In Figura 3.10 è mostrata la Scheda Audio. Per maggiori informazioni è possibile consultare la bibliografia dedicata [17][18][19].
Figura 3.10: La Scheda Audio.
3.3.1 Modulatore
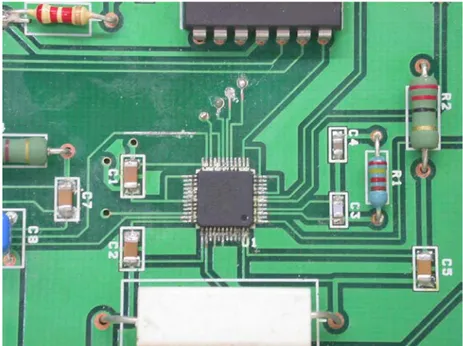
Il modulatore è il TAS5001 Texas Instruments [18](Figura 3.11) che genera due segnali PWM differenziali i quali vanno a pilotare un amplificatore PWM, che fornisce in uscita un segnale stereofonico. Il componente scelto ha due ingressi dati che riescono a gestire diversi formati audio PCM; è stata scelto il formato IIS (Inter Integrated Sound) a 24 bit, sfruttato nel progetto SPADA [18]. Visto che ai fini del progetto è necessario un solo tono, in uscita viene prelevato solo il canale sinistro, che comunque fornisce un segnale differenziale. Sul connettore LEMO in uscita, infatti, apparirà il segnale differenza tra le due sinusoidi suddette.
Figura 3.11: Al centro della figura è visibile il modulatore TAS5001.
In Figura 3.12 è mostrato ciò che compie il modulatore: l’immagine in alto rappresenta i campioni della sinusoide; quella in basso come vengono resi nella modulazione PWM. Più è alto il valore dei campioni più sarà ampio il duty cycle.
I segnali di clock necessari per la conversione, nonché l’alimentazione, vengono forniti esternamente tramite il Back Panel. I dati in ingresso sono rappresentati, come detto, dai campioni generati dalla McASP, per la cui generazione si rimanda al Capitolo 4.
3.3.2 Amplificatore
Come amplificatore in classe D è stato scelto il TAS5121, Texas Instruments [19]. È un amplificatore digitale PWM fully differential a basso rumore progettato per pilotare un carico da 4 Ω con una potenza fino a 100 W, con un rapporto THD+ N/P inferiore al 10%. L’efficienza raggiunta è del 90% [19]. Inoltre l’integrato prevede una serie di sistemi di protezione sia da sovracorrenti, che da surriscaldamenti, che da cali di tensione eccessivi, salvaguardando il dispositivo stesso e lo speaker a valle da condizioni di funzionamento dannose. In Figura 3.13 è mostrato la sezione del circuito stampato contente l’amplificatore.
3.3.3 Filtro in Uscita e Connettori
In uscita abbiamo un filtro passa basso di Butterworth del secondo ordine costituito da una capacità e un’induttanza per le singole uscite del segnale differenziale[17].
In Figura 3.14, L1 ed L2 sono le induttanze dei due canali; C19 e C18 le capacità. Tale filtro riceve in ingresso il segnale PWM amplificato dal TAS5121 e ne estrae la modulante che è appunto la sinusoide.
Figura 3.14: Filtro in uscita: da notare le due induttanze al centro ed il connettore LEMO sulla sinistra.
Inoltre è presente un comparatore LM393M che riceve in ingresso le due sinusoidi raddrizzate (mediante due diodi) e fornisce in uscita un’ulteriore onda quadra che va a pilotare il segnale AO_SYNC all’FPGA (Figura 3.15). Questo segnale ci sarà utile in seguito come trigger per stabilire gli intervalli temporali in cui contare A e B (vedi Capitolo 4).
Figura 3.15: In alto al centro il comparatore. Più in basso sulla destra dei diodi da notare le due resistenze SMD aggiunte in fase di testing.
La scheda è inoltre dotata di tre connettori per l’interfacciamento con il mondo esterno:
• un connettore DIN su cui riceve i segnali dal Back Panel (Figura 3.10);
• una porta seriale per la ricezione dei parametri ampiezza, frequenza e fase provenienti da LabView (Figura 3.16 a destra); • un connettore LEMO per l’interfacciamento con l’altoparlante
(Figura 3.16 a sinistra).
Figura 3.16: Connettori LEMO e seriale. Sono visibili inoltre il filtro in uscita e lo stadio del comparatore.
La potenza in uscita che arriva all’altoparlante, che rappresenta un carico da 4 Ω, è data semplicemente da:
2 2
2
8
cc cc OUTV
V
P
R
=
=
.Alimentando a 12 V si ottiene una potenza in uscita pari a 18 W.
3.3.4 Anello di Reset
Montato sulla scheda audio è presente anche un anello di reset costituito da due porte AND (in realtà quattro, avendo scelto come componente un integrato AND QUAD). La prima riceve in ingresso i segnali provenienti dai piedini /SD (ShutDown pin, di uscita, utile come segnale di protezione per eventuali unità esterne) e /OTW (OverTemperature Warning, pin attivo in caso di superamento dei limiti di temperatura di funzionamento del componente) provenienti dal TAS5121. Il valore dei due pin dà lo stato del chip: se entrambi alti il chip funziona correttamente [18]. L’uscita di questa AND entra in una seconda, che ha come altro ingresso il reset proveniente dall’FPGA. L’uscita di quest’ultima va al reset del TAS5001. In questo modo si riesce ad avere una protezione sul modulatore ed eventualmente un controllo sul reset del componente via FPGA (per adesso non implementato).
3.3.5 Assemblaggio e Verifica
La messa a punto dell’hardware della Scheda Audio ha rappresentato un aspetto molto critico dell’intero progetto sia per motivi intrinseci al processo di assemblaggio stesso, sia per errori commessi durante la fase progettazione. In questa fase, tutte le modifiche sono state applicate esternamente, riservando un’eventuale release definitiva a test
conclusi. Sono state comunque apportate tutte le modifiche agli schematici ed ai layout della scheda fatti in precedenza. Naturalmente, come il resto delle schede progettate per il sistema SPADA, anche questa è stata realizzata esternamente da un laboratorio specializzato, in modo da risultare sia più chiara nel montaggio, grazie alle serigrafie dei componenti, sia più precisa nella realizzazione stessa. Vediamo quindi le modifiche apportate.
In prima battuta sono stati riscontrati degli errori nelle connessioni di alcune piste della scheda: alcuni pin dal connettore DIN (quindi segnali provenienti dal Back-Panel, unico per tutte le schede) non giungevano correttamente ai rispettivi piedini del modulatore, rendendo vana ogni prova di funzionamento. Per cui è stato necessario filare nuovamente (con piccoli pezzi di filo) le relative piste, in modo che il modulatore ricevesse correttamente i clock e i dati (Figura 3.17).
Figura 3.17: Modifiche dei collegamenti tra back panel e modulatore.
Altro problema a livello di progetto che è stato riscontrato, riguarda lo stadio del comparatore in uscita. Il modo comune superava il valore (Input Voltage Range) al di sotto del quale il componente LM393M garantisce un corretto funzionamento. Si è ovviato al problema inserendo un partitore in ingresso. Tale partitore è costituito da R15 e R16, già
presenti nel progetto originale, collegate mediante due resistenze (R17 e R18
nello schema di Figura 3.18) da 330 Ω a massa. Si ottiene un’attenuazione globale di 1
4, sufficiente per riportare i segnali d’ingresso all’interno della dinamica di funzionamento del componente.
AO_SYNC
SPEAKER OUTPUT LEFT CHANNEL
R11 1R L2 10uH C11 100n R7 1R C18 10nF PWM-OUTPUTB-L R19 1k R16 1k R18 330 D1 1N4148 U4 LEMO 2 6 5 IN1 IN2 C19 10nF D2 1N4148 C16 150nF R15 1k C17 150nF L1 10uH 3.3V C13 470nF PWM-OUTPUTA-L R17 330 U13 LMV393M 1 2 3 4 5 6 7 8 OUTA INA-INA+ V- INB+ INB-OUTBV+
Figura 3.18: Filtro in uscita: da notare la parte in basso a sinistra costituita dal comparatore, ed in particolare l’aggiunta delle due
resistenze R15 e R16.
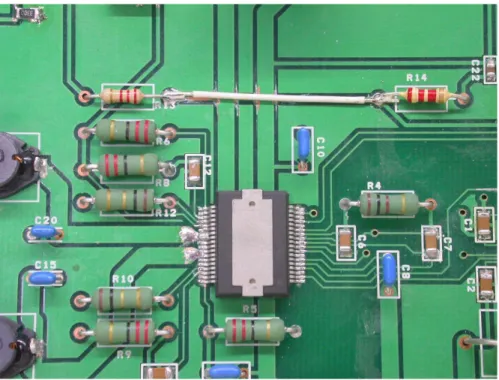
Ultimo errore nelle connessioni della scheda riguarda il collegamento tra R13 ed R14 facenti parte dell’ anello di reset. La pista che
le collegava è stata fatta sul top della scheda cortocircuitando così le due resistenze con altre piste. Durante il rifacimento del layout è stata semplicemente spostata la pista nel piano bottom. Per la fase di testing si è dovuto, invece, limare le parti di piste che creavano i cortocircuiti non voluti. Dopodiché, sempre tramite un filo, si sono collegati i punti stabiliti in fase di progetto (Figura 3.19).
Figura 3.19: Ponticello tra R14 ed R13.
La difficoltà nella messa a punto della scheda è dovuta anche a problemi intrinseci dei componenti utilizzati o meglio, al loro montaggio manuale. Infatti, come si vede nelle Figure 3.11 e 3.13, il modulatore e l’amplificatore sono di tipo SMD (Self Mounted Device) per cui hanno richiesto una notevole attenzione nel montaggio. In particolare c’era il rischio che alcuni piedini risultassero cortocircuitati a causa del poco margine per le saldature. Alla fine, dopo aver testato ogni coppia consecutiva di piedini con il tester, e verificato che non ci fossero cortocircuiti né sul TAS5001 né sul TAS5121, ci siamo ritenuti soddisfatti sotto questo aspetto. Naturalmente la prova finale è venuta dopo, con il funzionamento effettivo della scheda che svolge correttamente ciò per cui è stata progettata. I risultati saranno esposti nel Capitolo 4.