Indici per valutazioni di
maneggevolezza
7.1
Definizione degli indici
In letteratura sono reperibili articoli che si interressano di valutare una prestazione oggettiva1
del motoveicolo. Con i termini manovrabilità e maneg-gevolezza si indica la capacità che ha il motociclo di compiere manovre com-plesse e la difficoltà che il pilota incontra nell’eseguirle. La valutazione di tali caratteristiche in un motoveicolo reale, è resa difficoltosa dall’impossibilità di prescindere dal pilota e, di conseguenza, dalla non esatta ripetibilità delle prove. Uno stesso mezzo, nelle stesse condizioni ambientali, che deve af-frontare la medesima manovra, guidato da collaudatori differenti, porta ad acquisizioni di dati che si discostano anche sensibilmente. Inoltre, lo stesso pilota, nelle stesse condizioni ambientali, che deve affrontare la medesima manovra più volte con un motoveicolo, non agisce sempre nello stesso modo. In questi casi, si ricorre essenzialmente ad un approccio statistico; inoltre, i collaudatori vengono sottoposti a test preliminari per abituarsi alla manovra. Un altro accorgimento utilizzato è quello di far eseguire la stessa manovra a più collaudatori.
Come è stato ampiamente discusso in precedenza, nella simulazione, la valutazione dell’handling di un motociclo incontra oggettive difficoltà, dovute
1
Si intende una valutazione delle caratteristiche del motoveicolo, indipendente dalle sensazioni di chi lo conduce.
7.1 Definizione degli indici 103
all’instabilità di questo tipo di veicolo, che impediscono di riprodurre manovre con modelli in anello aperto. Risulta chiaro come un modello di pilota risulti indispensabile in questo genere di simulazioni. Da un punto di vista dinami-co, il motociclo può essere visto come un sistema controllato da un driver, in modo tale da avere le uscite desiderate (traiettoria,. . . ). Nei modelli elaborati nel presente lavoro gli inputs sono:
• La coppia di sterzo
• La forza di trazione/frenata
Gli outputs sono:
• La velocità longitudinale
• Gli angoli di rollio e di imbardata
• Le velocità di rollio e di imbardata
• . . .
Per valutare le caratteristiche di handling del un motociclo si utilizzeranno degli indici, per mettere in relazione gli outputs e gli inputs. Nel caso di una manovra assimilabile ad una curva ad U, come quella descritta in 6.1.3 ed utilizzata nel presente lavoro, percorsa a velocità costante, l’unico input valido è la coppia applicata allo sterzo. In seguito si manterrà il simbolismo utilizzato nei precedenti capitoli, in particolare in (2) ed in (4).
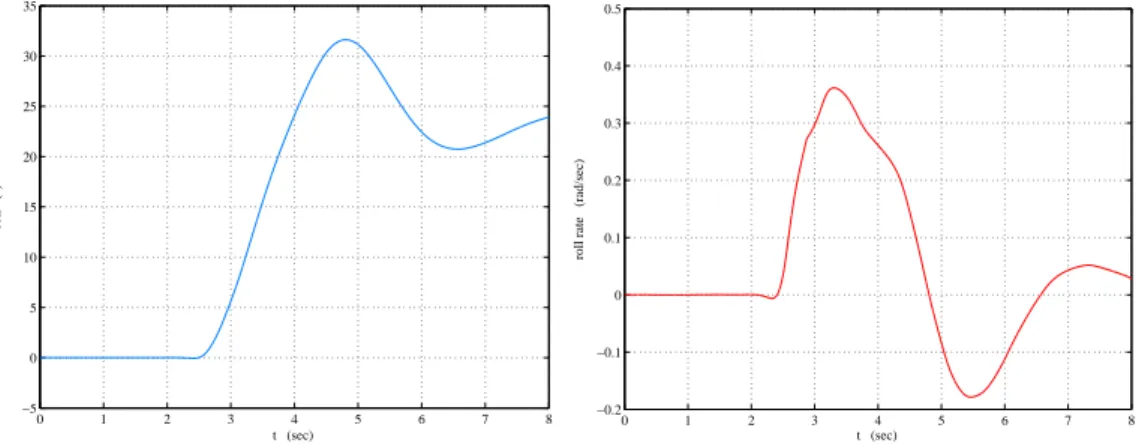
Nelle Fig. 7.1, 7.2, 7.3 sono mostrati gli andamenti temporali di alcune grandezze caratteristiche, rilevate nella fase di impostazione ed ingresso della curva.
Il primo indice, chiamato indice di rollio, è il rapporto fra il primo picco di coppia di sterzo2
ed il valor massimo della derivata temporale dell’angolo di rollio. Questo indice mette in evidenza la relazione tra l’entità delle azioni che il pilota deve compiete per iniziare la manovra e la massima velocità con cui il motoveicolo tende a raggiungere l’angolo di rollio desiderato.
Ir = Mδmax ˙ φmax (7.1) 2
Dalla parte opposta della curva, in modo tale da permettere al veicolo di inclinarsi da lato desiderato.
0 1 2 3 4 5 6 7 8 −5 0 5 10 15 20 25 30 35 t (sec) roll (°) 0 1 2 3 4 5 6 7 8 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5 t (sec)
roll rate (rad/sec)
Figura 7.1: Angolo di rollio e sua derivata temporale
0 1 2 3 4 5 6 7 8 −2.5 −2 −1.5 −1 −0.5 0 0.5 t (sec) δ (°) 0 1 2 3 4 5 6 7 8 −0.05 −0.04 −0.03 −0.02 −0.01 0 0.01 0.02 0.03 t (sec) δ rate (rad/sec)
Figura 7.2: Angolo di sterzo e sua derivata temporale
Considerando due motocicli simili nella stessa manovra, l’angolo di rollio di equilibrio ed il profilo della velocità di rollio possono essere assimilabili. Questo significa che, minore è la coppia di sterzo necessaria per raggiungere all’incirca la medesima velocità di rollio, maggiori sono le doti di handling del motoveicolo. Quindi, valori più bassi di Ir indicano migliori doti di
guid-abilità.
Il secondo indice che si introduce è chiamato indice di imbardata, e rappresenta il rapporto fra il primo picco di coppia di sterzo (in analogia al precedente) e quello della derivata temporale dell’angolo di imbardata. Quest’ultimo è quello che indica quanto il veicolo tende ad allontanarsi dal-la traiettoria imposta, manovra necessaria per assumere l’angolo di rollio desiderato. Iy = Mδmax ˙ ψmax (7.2)
7.1 Definizione degli indici 105 0 1 2 3 4 5 6 7 8 −10 0 10 20 30 40 50 60 70 t (sec) Coppia (Nm) 0 1 2 3 4 5 6 7 8 −0.45 −0.4 −0.35 −0.3 −0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 t (sec)
yaw rate (rad/sec)
Figura 7.3: Coppia di sterzo e derivata temporale dell’angolo di imbardata
L’ultimo indice prende il nome di indice di sterzata e rappresenta il rapporto fra il primo picco di coppia di sterzo (in analogia al precedente) e quello della derivata temporale dell’angolo di sterzo.
Iδ =
Mδmax
˙ δmax
(7.3) Questo parametro fornisce indicazioni su come viene percepita la sterzata dal pilota in fase di impostazione. Tuttavia, è opportuno precisare che questo indice non è stato utilizzato nel presente lavoro; infatti, i valori della deriva-ta temporale dell’angolo di sterzo ricavati nelle simulazioni presenderiva-tano in-evitabili oscillazioni, dovute essenzialmente al comportamento del controllore che, li rendono poco utilizzabili.
Considerando i risultati descritti nel capitolo 6, si è scelto di paragonare i modelli di motoveicolo Intermedio (4.7) e Complesso (4.6), utilizzando alcuni degli indici appena definiti. Pur avendo già messo in luce il comportamen-to più realistico che il modello di pneumatico non lineare fornisce, rispetcomportamen-to a quello lineare, per completezza sarà osservato anche il comportamento di quest’ultimo, associato ad un solo modello di motoveicolo (Intermedio).
7.2
Influenza dell’inclinazione dell’asse di
ster-zo
Nel capitolo 2.4 sono state definite alcune quantità, che comunemente sono dette quote ciclistiche. Una di queste è l’inclinazione dell’asse di sterzo ǫ, definito come l’angolo fra kφ e kδ
3
. Inoltre, è stato messo in eviden-za il legame fra inclinazione dell’asse di sterzo, avaneviden-zamento e avancorsa. Utilizzando due degli indici definiti nella sezione precedente, si vuole capire l’influenza che l’angolo ǫ ha sulla manovrabilità e sulla maneggevolezza del motoveicolo.
In Fig. 7.4 è mostrato l’andamento dell’indice di rollio Ir in funzione
del-l’inclinazione dell’asse di sterzo ǫ, normalizzato rispetto al valor massimo ricavato dal modello Complesso, per tre modelli diversi. La prima cosa che si nota osservando questo grafico è un andamento monotono decrescente nel range di ǫ considerato, che rappresenta quello in cui vengono scelti i valori universalmente; come è già stato detto, indici di rollio Ir più bassi
corrispon-dono ad un aumento di maneggevolezza percepita dal pilota. Questo significa che, nella fase di impostazione della curva, il conducente esercita una coppia minore per raggiungere sostanzialmente la stessa velocità di rollio. Questo conferma quanto era lecito attendere dopo aver osservato, che un angolo di inclinazione dell’asse di sterzo più vicino a 0◦ ha come conseguenza, a
pari-tà di avanzamento, un’avancorsa minore; in questa condizione, il momento rispetto all’asse di sterzo generato dalla forza laterale del pneumatico risulta minore, rendendo meno difficile (in termini di coppia di sterzo) la sterzata.
Confrontando i risultati ottenuti dal modello Intermedio con entrambi i modelli di pneumatico, si nota che i due andamenti mantengono una differen-za pressoché costante; inoltre, l’indice di rollio del modello con pneumatico lineare è sempre maggiore rispetto a quello non lineare. Diretta causa di questo fenomeno è la differente forza laterale (Fy) e momento di
autoallinea-mento (Mz), che questi due modelli di pneumatico forniscono, a parità di
condizioni. Infatti, nel modello non lineare, più vicino al comportamento reale, insorge un fenomeno di saturazione per grandi valori (in valore assolu-to) dell’angolo di deriva e di quello di camber.
3
7.3 Influenza dell’avanzamento 107 −30 −29 −28 −27 −26 −25 −24 −23 −22 −21 −20 0.4 0.5 0.6 0.7 0.8 0.9 1 ε (°) Ir
Intermedio pneum. lineare Intermedio pneum. non lineare Complesso pneum. non lineare
Figura 7.4: Ir in funzione di ǫ
Confrontando i risultati dei due modelli di motoveicolo, entrambi con il pneumatico non lineare, si osserva che i due andamenti hanno una pendenza diversa; in particolare il gap è maggiore per valori più alti (in valore assolu-to) dell’angolo di inclinazione dell’asse di sterzo. Questo mette in evidenza come una descrizione cinematica con un minor grado di approssimazione del-la zona anteriore del motocilo influisca in maniera abbastanza evidente suldel-la valutazione della manovrabilità e soprattutto della maneggevolezza del mo-tociclo.
In Fig. 7.5 è riportato l’andamento dell’indice di imbardata Iy, anch’esso
normalizzato come il precedente, definito dalla (7.2), in funzione dell’angolo di inclinazione dell’asse di sterzo ǫ. Anche in questo caso, si possono fare le stesse considerazioni estrapolate dallo studio dell’indice di rollio Ir.
7.3
Influenza dell’avanzamento
Facendo ancora riferimento al capitolo 2.4, in cui sono state definite le quote ciclistiche, si vuole mettere in luce l’importanza dell’avanzamento a nella manovrabilità e nella maneggevolezza del motociclo, utilizzando i
mo-−30 −29 −28 −27 −26 −25 −24 −23 −22 −21 −20 0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 1 ε (°) I y
Intermedio pneum. lineare Intermdio pneum. non lineare Complesso pneum. non lineare
Figura 7.5: Iy in funzione di ǫ
delli elaborati nei precedenti capitoli. Si ricorda che, con riferimento alla sezione 2.5, l’avanzamento a è definito come la distanza fra l’asse di sterzo ed il centro ruota, misurata nel piano xδ− zδ.
In Fig. 7.6 è mostrato l’andamento dell’indice di rollio Ir in funzione
dell’a-vanzamento a, normalizzato rispetto al valor massimo ricavato dal modello Complesso, per tre modelli diversi; anche in questo caso si nota immedia-tamente l’andamento monotono decrescente. Nel range di valori esaminato, a parità di inclinazione dell’asse di sterzo ǫ, un aumento dell’avanzamen-to comporta una diminuzione dell’avancorsa (si veda la relazione (2.2)); in questa condizione, il momento rispetto all’asse di sterzo generato dalla forza laterale del pneumatico risulta minore, rendendo meno difficile (in termini di coppia di sterzo) la sterzata.
Confrontando i risultati ottenuti dal modello Intermedio con entrambi i modelli di pneumatico si nota che i due andamenti mantengono una differen-za pressoché costante; inoltre, l’indice di rollio del modello con pneumatico lineare è sempre maggiore rispetto a quello non lineare. Diretta causa di questo fenomeno è la differente forza laterale (Fy) e momento di
7.3 Influenza dell’avanzamento 109 10 15 20 25 30 35 40 45 50 0.4 0.5 0.6 0.7 0.8 0.9 1 avanzamento (mm) Ir
Intermedio pneum. lineare Intermedio pneum. non lineare Complesso pneum. non lineare
Figura 7.6: Ir in funzione di a 10 15 20 25 30 35 40 45 50 0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 1 avanzamento (mm) I y
Intermedio pneum. lineare Intermedio pneum. non lineare Complesso pneum. non lineare
Figura 7.7: Iy in funzione di a
condizioni. Infatti, nel modello non lineare, più vicino al comportamento reale, insorge un fenomeno di saturazione per grandi valori (in valore assolu-to) dell’angolo di deriva e di quello di camber.
Confrontando i risultati dei due modelli di motoveicolo, entrambi asso-ciati al pneumatico non lineare, si osserva che i due andamenti hanno una pendenza diversa; in particolare il gap è maggiore per valori più bassi dell’a-vanzamento a. Questo mette in evidenza come una descrizione cinematica con un minor grado di approssimazione della zona anteriore del motocilo in-fluisca in maniera abbastanza evidente sulla valutazione della manovrabilità e soprattutto della maneggevolezza del motociclo.
In Fig. 7.7 è riportato l’andamento dell’indice di imbardata Iy, definito
dalla (7.2), normalizzato come il precedente, in funzione dell’avanzamento a. Anche in questo caso, si possono fare le stesse considerazioni estrapolate dallo studio dell’indice di rollio Ir.